無人駕駛智能車導航定位系統設計研究
2019-10-15 12:43:22郭麗芳游雪輝蘇志鑫鄒家偉鄒何
中國管理信息化 2019年18期
郭麗芳 游雪輝 蘇志鑫 鄒家偉 鄒何
[摘 要]為了保證無人駕駛汽車在道路中安全可靠運行,需要為無人駕駛車輛提供高精度的定位信息。目前,常用的定位方式單獨使用在無人駕駛車輛上時,都會因為其局限性不能長期穩定地為無人駕駛車輛提供高精度的定位信息。本設計將多種定位方式相組合,利用不同定位方式的特點和優點,對不同定位方式因為環境變化或時間累積造成的誤差進行修正,使定位系統能夠長期穩定地為無人駕駛車輛提供高精度的定位信息,無人駕駛車輛在擁有高精度的位置信息時,可進行自動規劃行駛路徑,使車輛安全到達目的地。
[關鍵詞]無人駕駛;高精度定位;組合定位
doi:10.3969/j.issn.1673 - 0194.2019.18.081
[中圖分類號]U463.67[文獻標識碼]A[文章編號]1673-0194(2019)18-0-03
0? ? ?引 言
近年來,隨著新能源和智能技術的發展,智能車已經成為現代汽車發展的趨勢,越來越多的智能化技術應用到汽車系統中。智能車在智能交通系統中成為許多高新技術的載體,對于人們生產、生活相關的道路交通安全、汽車自主創新、煤炭工業瓦斯檢測、物流運輸、環境保護和軍事應用等各個方面都具有重要意義。隨著新能源智能車相關技術的研究和發展,智能車已在各領域得到一定程度地推廣和使用,但是如何在確保安全的首要前提下,使智能車在復雜交通系統環境下更高效、智能運作,是未來整個城市智能交通系統的發展方向。在新能源無人駕駛智能車的關鍵技術中,無人駕駛技術是關鍵的技術之一,自動導航定位技術是無人駕駛的核心基礎,是區分智能車和非智能車最重要的標準。
1? ? ?導航定位系統分析與設計
無人駕駛汽車在道路中行駛,最重要的是保證安全。車輛從起始位置行駛至目標位置的過程中,需要定位系統來實時獲取車輛位置信息。目前,常用的定位方式包括衛星定位、慣導定位、視覺里程算法定位、UWB超帶寬無線定位等。
1.1? ?常用定位系統在無人駕駛導航定位中的分析
1.1.1? ?衛星定位
全球衛星定位系統是一種使用運行在地表上空的衛星進行定位的系統,車輛能夠通過全球衛星定位系統獲取車輛當前的位置信息。目前,全球應用廣泛的四大衛星定位系統主要包括美國的GPS、俄羅斯的GLONASS,歐盟的GALILEO和中國的BDS。衛星定位技術成熟,方式簡單,能大致確定無人駕駛車輛的經緯度。但使用衛星定位時,衛星信號在傳輸過程中容易受到建筑物遮擋,使衛星信號弱或丟失,導致衛星定位位置產生較大偏差,因此,不能只使用衛星定位為無人駕駛車輛進行定位。
1.1.2? ?慣導定位
慣導定位系統包括平臺式慣導系統和捷聯式慣導系統。慣導定位通過陀螺儀和加速度計將運動物體的運動狀態對時間進行積分,最終解算出物體的運動姿態、運動速度和所處位置等信息。慣導定位方式不依賴于衛星、基站等,建設成本低。慣導定位技術確定位置的方法基于積分,由于車輛在行進過程中的偏移和抖動,長時間的慣導定位會累積積分誤差,隨著車輛運行里程增加,捷聯慣導定位方式累積誤差增加,使無人駕駛車輛的定位信息產生偏差。
1.1.3? ?視覺里程算法定位
視覺里程算法定位方式使用了機器視覺,無人駕駛車輛使用攝像頭獲取道路中的圖像,通過圖像處理算法提取每一幀圖像的特征值,通過各幀圖像中同一物體所處矩陣位置的不同,不同幀圖像進行不斷迭代,累積求和形成視覺里程計,計算出無人駕駛車輛當前所處位置,從而對車輛進行定位。使用機器視覺能夠獲得顏色豐富的圖像信息,有利于對車輛周圍的環境信息進行檢測。攝像頭對光線敏感,強光、逆光和黑暗環境會極大地影響攝像頭拍攝的圖像曝光,高速運行的車輛也會使普通攝像頭拍攝的圖像變得模糊和扭曲。此外,車輛運動時會使機器視覺的視角發生變化,被拍攝的物體特征會發生改變,導致從圖像中提取道路特征值的算法難度被提高。最惡劣的情況是,由于光線變化和攝像頭視角發生變化,圖像處理算法失效。因此,在無人駕駛車輛中,不能單獨使用機器視覺里程算法對無人駕駛車輛進行定位。
1.1.4? ?超帶寬無線定位
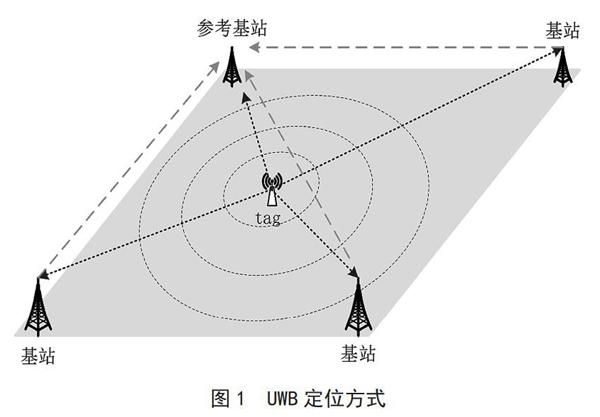
超寬帶(Ultra Wideband,UWB)是一種使用了報文到達時間差的新型無線通信技術。用UWB方式進行定位,需要一個被定位的終端、一個參考基站以及至少3個普通基站。這個UWB終端稱為UWB標簽(tag),UWB定位方式示意圖如圖1所示。
使用UWB進行定位時,由于UWB標簽與各個UWB基站之間的距離不同,UWB標簽廣播一次數據,但各個基站接收數據時間不同,此時,基站接收到的數據產生了時間差。各個基站將數據再發送給參考基站,參考基站獲得UWB標簽發送信號到達不同基站的時間,經過解算得到UWB到各個基站的時間差,當解算時間差數量大于或等于3個小時時,可利用公式(1)建立四元二次方程組,解算求得UWB標簽的位置。
(1)
其中,(x,y,z)對應于UWB標簽的位置;(xi,yi,zi)對應于UWB基站的位置信息;C為真空中的光速3×108m/s;ti表示參考點位置的到達時間;t0表示定位點發出信號的時間。當參考基站的個數越多,解方程得到相同解的個數越多,定位精度越高。
UWB定位方式的精度在厘米級,能夠滿足無人駕駛車輛對定位的需求。UWB定位方式高度依賴UWB基站,建設成本高昂,在無人駕駛車輛中不建議單獨使用UWB定位方式進行定位。
1.2? ?無人駕駛導航定位方式設計
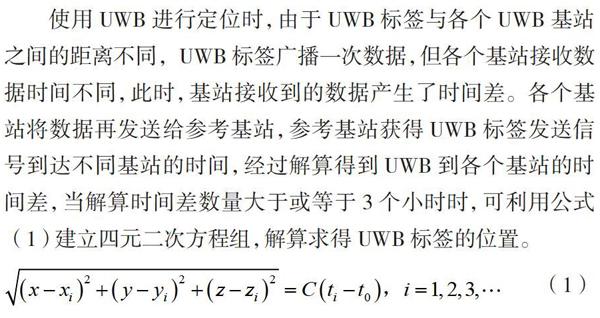
本文使用衛星定位、捷聯慣導定位、機器視覺里程算法定位和UWB定位4種方式相結合的定位方式,能夠使無人駕駛車輛在各種道路上實現高精度定位。各種定位方式相融合,能夠對各種定位方式的不足之處進行互補。使用衛星定位確定車輛所處的位置范圍后,通過捷聯慣導定位方式能夠縮小車輛位置信息范圍,使用衛星定位對捷聯慣導定位產生的誤差進行修正。使用捷聯導航定位的方式,既實現了定位功能,又能使用陀螺儀、加速度計和電子羅盤進行姿態解算,判定當前車輛的車速、運動姿態等,判定車輛運動方向是否與道路方向平行,車輛處于上坡或下坡狀態、轉向時的轉向角度等信息。通過與機器視覺相結合,解算當前道路的路面車道線、標線、前后方車輛運動狀況,應用人為駕駛車輛時左右后視鏡的功能。在復雜的交通路口、橋梁下或者隧道中,衛星定位系統將會失效,如果隧道較長,慣導定位方式會出現誤差,此時,可以通過UWB定位繼續保持無人駕駛車輛的定位精度。在此種混合定位模式下,無人駕駛車輛能夠實現持續高精度定位。混合定位示意圖如圖2所示。
2? ? ?智能車系統設計
為了實現無人駕駛車輛從起始位置自動行駛至目標位置,無人駕駛車輛要應用自動定位導航、路徑規劃、運動決策和控制功能,對系統進行模塊化設計,主要包含主控模塊、電源模塊、定位系統模塊、電機驅動模塊和數據通信模塊。小車硬件系統框圖如圖3所示。
2.1? ?選擇主控芯片
主控芯片是無人駕駛車輛的核心部件,需要結合外圍器件,如驅動LCD屏使用24位并行可變靜態存儲控制器總線(FSMC)、觸摸屏使用集成電路總線協議(IIC)、定位系統模塊使用通用異步收發傳輸器(UART)協議。因此,選擇的芯片應具有FSMC總線接口、IIC接口、UART接口等片上外設,根據芯片處理速度、片上外設資源和性價比考慮,選用ST公司STM32F429作為主控芯片。
2.2? ?小車系統電源設計
為了小車能夠穩定運行,需要為小車提供穩定的電源。小車設計中,電機驅動使用的電壓為12 V,屏幕電源電壓為5 V,單片機工作電壓為3.3 V。因此,小車電池采用12 V電壓輸出的電池,使用LM 7805和LM 1117-3.3輸出5 V和3.3 V的電壓,以供給系統各個模塊使用。LM 7805和LM 1117-3.3最大輸出電流為1.5 A,最大輸出功率分別為7.5 W和4.95 W,經過對小車系統功耗進行分析可以發現,兩款電源芯片能夠為小車提供足夠的功率輸出,并有一定的功率裕量。
2.3? ?定位系統設計
衛星定位方式使用GPS+北斗雙定位模塊ATGM332D獲取車輛當前的位置信息,該模塊的定位精度為2.5 m,首次定位時間為32 s。模塊在上電后,會自動進行初始化,初始化完成后,ATGM332D通過UART將定位信息按照NEMA0183協議標準格式發送給車載電腦,車載電腦按照相對應的格式解算數據,解算完成后車載電腦獲得車輛的定位信息。
機器視覺通過攝像頭采集圖像信息,采集的圖像信息應盡量清晰,以提高物體特征辨識度,減小因圖像采集原因引起的誤差。本次設計采用了一款CMOS傳感器制作的攝像頭OV5640,最大能夠輸出500 W像素的圖像(2 592×1 944分辨率),支持RGB565、YCbCr422、JPEG等多種格式的圖像輸出。此外,OV5640還可以對白平衡、對比度、飽和度以及色度等進行自動補償,提高采集到的圖像信號的準確度。
2.4? ?電機驅動模塊設計
單片機能夠控制輸出PWM控制電機的轉動速度,PWM的占空比越大,電機轉動速度越快。因為單片機I/O口輸出電壓為3.3 V,最大輸出電流為15 mA,得到最大輸出功率約
50 mW,不能直接驅動大功率的電機進行工作,需要通過驅動電路調整。經過驅動電路后,輸出的PWM信號與輸入的PWM信號頻率、占空比一致,帶負載能力大大增加。
2.5? ?系統原理圖
對系統各部分進行模塊化設計,分別為電源接口及開關模塊、電源電路模塊、MPU9250接口模塊、UWB接口模塊、LED指示燈模塊、電機接口模塊、攝像頭接口模塊、LED屏幕接口模塊、電機驅動模塊和STM32F429核心板模塊,上述模塊構成系統整體的原理圖。
3? ? ?樣機及性能測試
設計完成車輛原理圖后,可以對車輛進行焊接和調試。系統設計中,主控使用帶有驅動RGB888屏幕接口的STM32F429的最小系統板。準備一塊萬用板,將小車所使用的電源芯片、mpu9250模塊、電機驅動模塊、GPS定位模塊、攝像頭接口等焊接至萬用板上,將攝像頭通過支架立起適當高度,選擇適當的視角,通過FC軟排線連接至攝像頭接口,將屏幕連接至最小系統板屏幕接口,使用杜邦線將UWB定位模塊和衛星定位模塊ATGM332D連接至單片機的串口引腳進行整機調試。使用集成開發環境keil對單片機進行編程,編寫各個功能模塊的驅動程序。各個模塊的數據采集無誤后,對各個模塊的數據進行算法融合,使小車能夠持續穩定地獲得高精度的定位信息,進行自動路徑規劃。
4? ? ?結 語
無人駕駛車輛實現自動定位導航的關鍵意義在于使無人駕駛車輛持續獲得高精度的定位信息。多種定位方式組合定位能夠使無人駕駛車輛在不同的環境中持續獲得高精度定位,但此種方式也使車輛整體成本增加。因此,相關企業應在保證車輛安全可靠行使的前提下,尋求高精度定位方式和成本之間的平衡點。提高定位系統精度需要不同學科領域融合研究,在組合定位系統中產生的不同數據進行融合時,需要更優的算法,使無人駕駛車輛獲得更高的精度。智能交通和智慧城市中實現全路況無人駕駛,人們的生活將變得更加便利。
主要參考文獻
[1]王一強,孫罡,侯祥博.UWB超帶寬技術研究及應用[J].通信技術,2009(3).
[2]張新躍,沈樹群.UWB超帶寬無線通信技術及其發展前景[J].數據通信,2004(2).
[3]汪明磊.智能車輛自主導航中避障路徑規劃與跟蹤控制研究[D].合肥:合肥工業大學,2013.
[4]王欽普,趙佳,趙浩.無人駕駛汽車發展面臨的挑戰與建議[J].客車技術與研究,2016(6).
[5]譚寶成,曹國浩.4G網絡在無人駕駛智能車遠程監控系統上的應用[J].電子設計工程,2015(15).
[6]李忠東.戴姆勒:穩步推進無人駕駛與共享出行[J].汽車與配件,2018(35).
[7]陳文華.汽車無人駕駛技術的發展現狀與研究趨勢[J].科技創新導報,2019(11).
[8]章江.戴姆勒穩步推進無人駕駛與共享出行[J].輕型汽車技術,2019(1).
[9]楊忠陽.“無人駕駛”汽車何時上路[J].智慧中國,2019(4).
[10]趙廣立,李惠鈺.無人駕駛技術的那些事兒[J].商業觀察,2019(Z1).
[11]袁孝斌.無人駕駛智能車障礙檢測方法探討[J].企業導報,2016(9).
[12]王凡.智能車輛中基于GPS和陀螺儀的導航與定位[D].北京:北京工業大學,2013.
[13]劉霞,龍飛,張延升.雷達機動目標跟蹤無源定位優化研究[J].計算機仿真,2016(3).
