我國汽車巡航控制系統的發展現狀及發展前景
2019-10-21 09:15:24郭佳
時代汽車 2019年13期
關鍵詞:發展現狀
郭佳
摘 要:現如今,我國的汽車巡航控制系統緊跟時代發展,走向智能化。本文主要論述了我國汽車巡航控制系統當前的發展狀況,并在此基礎上對汽車巡航系統未來的發展提出建議和意見。
關鍵詞:我國汽車巡航控制系統;發展現狀;發展前景
1 引言
隨著我國經濟的逐漸發展,汽車走進了千家萬戶。汽車帶給人們便利的同時,也對我們的環境造成了嚴重的污染。于是,人們將對汽車的研究方向從難以提高的內燃機工作效率,轉移到汽車巡航控制系統上。期望保障汽車的穩定行駛,減少人為駕駛的不規范導致的油耗增加,污染加重。同時,更重要的是將駕駛員從駕駛中解放出來,緩解駕駛員的駕駛疲勞,提高駕駛的舒適性,從而降低駕駛疲勞的事故率。
2 汽車巡航控制系統
汽車巡航控制系統是由車載ECU控制,通過傳感器實時監測當前車況和行車環境,并根據當前車況控制節氣門開度和剎車制動器,調節車速的大小,從而滿足當前汽車行駛需求。
汽車巡航控制系統最早起源于20世紀40年代,由美國盲人發明家所發明,并逐漸應用于汽車,一直發展至今,而國內相比于國外的發展要慢上許多,在20世紀90年代開始逐漸對汽車巡航進行研究。隨著技術的不斷突破,智能化的興起,我國緊跟時代潮流,大力發展智能化,使智能化應用于各行各業,于是無人駕駛概念的提出,極大的促進了我國汽車巡航控制系統的研究發展。在對汽車人才的培養上,各高校已將汽車巡航系統的學習加入到高校相關專業的課本里,并伴有相關的課程設計,使學生對汽車巡航有初步的認知和把握,為未來的工作研究打下良好的基礎。
3 我國汽車巡航控制系統的發展現狀
無人駕駛是近年來的熱門話題,作為無人駕駛技術的核心技術之一的汽車巡航控制系統,也成為了各大高校和研究所的熱門研究內容。
3.1 控制系統的完善
東北林業大學針對汽車巡航控制在行駛過程中存在的汽車加減速和安全性、舒適性等多個性能指標不協調的問題,提出了一種基于模型預測控制和最優控制的控制算法。通過根據本車和前車縱向運動學特性,建立了車輛和前車的逆縱向運動模型,并將多性能指標量化,將含有多個變量的目標函數轉化為一維極值問題,提出極值MPC算法。經仿真模擬實現其目標,在保證安全性的情況下,具有更高的舒適性和快速性。[1]
汽車在行駛過程中會由于大風、道路顛簸等非線性、不確定性環境因素的影響使得汽車巡航系統建立的參考模型往往會十分的不準確,極大的影響汽車巡航系統的功能性。因此東北林業大學針對非線性系統等效線性化方法的不足,提出通過建立汽車縱向動力學模型和模糊控制理論設計ACC系統并采用MATLAB/Simulink驗證,得出該方法能夠實現汽車的自適應巡航功能,并保證良好的跟蹤性、安全性和適應性。[2]
3.2 行車環境的感知
針對在行車過程中彎道處目標車輛的丟失或混亂的問題,文獻[3]采用應用擴展卡爾曼濾波理論進行巡航系統前方彎道關鍵目標識別研究,建立非線性三自由度車輛模型,設計了橫擺角速度的擴展卡爾曼濾波器,實現了道路曲率的在線實時估計。建立彎道目標識別模型,并采用模糊控制理論,設計多目標換道模糊邏輯控制器,確定關鍵目標車輛,并利用MATLAB/Simulink仿真驗證,得出了該方法能有效識別彎道處的目標車輛。[3]
在安全車距的設計上,文獻[4]采用H理論設計了線性參變間距控制算法,并采用線性參變模型描述了車輛與前車的相對運動特性,通過加速度限值抑制了控制輸入飽和且改善了駕駛的舒適性。[4]
近幾年隨著車聯網的發展,和相關的標準的完善,文獻[5]提出了一種基于車聯網的汽車巡航控制系統,開發了一種分層式控制策略,在上層控制中將汽車的傳感器發送的本車速度、加速度和車間通信模塊發來的前車車距、速度、加速度等信息進行采用加速度前饋加誤差反饋控制算法分析,由下層的執行機構控制層對汽車進行實時控制。實現汽車巡航。經仿真和整車試驗表明:該控制策略可以實現快速準確響應,但是當汽車時間距較小時,會發生較大的誤差。雖然有一定的局限性,但是它對實現更小的跟車間距的準確性提供了一種可能。為未來的車聯網巡航系統的發展奠定了基礎。[5]
3.3 駕駛員行為特性研究
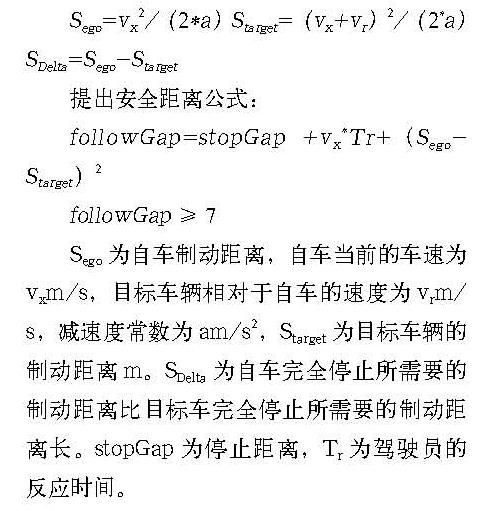
文獻[6]基于駕駛員行為跟車行為特性開發了新型的自適應巡航算法,通過對駕駛員跟車行為特性的研究比較市面通用的決策算法,指出了通用算法的不完善提出了新型算法。
Sego為自車制動距離,自車當前的車速為vxm/s,目標車輛相對于自車的速度為vrm/s,減速度常數為am/s2,Starget為目標車輛的制動距離m。SDelta為自車完全停止所需要的制動距離比目標車完全停止所需要的制動距離長。stopGap為停止距離,Tr為駕駛員的反應時間。
經仿真和實車驗證,發現模型能夠較好地擬合跟車過程,可用于自動駕駛或者自適應巡航系統的跟車距離決策,并且通過特征參數調整獲取不同駕駛/乘坐習慣,使巡航系統更加符合駕駛員跟車習慣,提高駕駛舒適性。[6]
4 我國汽車巡航控制系統的發展前景
隨著我國人民對生活出行質量的要求逐漸提高,汽車行業又迎來新的發展前景,加快推進汽車巡航控制系統的研究發展,已是汽車行業發展不可或缺的關鍵一步。以下是對汽車巡航控制系統未來發展的初步展望。
4.1 控制算法的研究
汽車駕駛過程要使汽車針對不同的情況有著相對應的準確反應。這需要各個車用傳感器實時傳輸數據,但隨著行駛條件的復雜化,車況數據也愈發復雜,存在著諸多變量。這就需要系統的控制算法能及時分析處理數據,并發出相應的指令,對汽車進行調整。因此新算法的研究對于巡航系統的發展至關重要。
4.2 加強汽車通訊技術,實現汽車互聯互通
傳統的汽車通過傳感器來監測當前車況,與周圍車輛信息,但相比于傳感器,利用無線通訊與周邊車況汽車實現互聯互通,獲得車輛的駕駛信息,豐富的行車數據使得系統對汽車的控制更加的精準,可靠。
4.3 建立故障預警、處理機制,提高系統的安全性
從2012年發生的豐田汽車巡航失控,到2018年發生奔馳車巡航失控和東風標致巡航失控,這些事故,無不在提醒我們在對汽車巡航技術滿懷期待的同時,也要加強巡航系統的穩定性、安全性和對系統故障預警、處理機制的建立,保障行車安全。
4.4 嘗試人工通用智能實現汽車的無人駕駛
近日,清華研發的天機芯引發了人工智能界的轟動,它作為人工智能的兩種主流研究的融合,為實現人工通用智能(AGI)奠定了堅實的基礎。因此大力推動AGI的發展有利于更好地實現汽車的無人駕駛技術。
5 結語
智能化時代的到來對汽車巡航控制系統的發展既是機遇又是挑戰,人工智能無人駕駛的興起,給予了汽車行業巨大的發展前景。汽車巡航系統作為汽車電控的核心技術之一,具有很大的潛力和市場,將來一定是作為評估汽車性能好壞的一個重要的參考依據。因此,抓住時代機遇、勇于創新,不斷完善、持續發展,將會為汽車行業的發展提供源源不斷的動力。
參考文獻:
[1]凌濱,宋夢實,邢鍵,等.汽車自適應巡航系統的多性能指標控制算法[J].機械科學與技術,2018,37(5):690-697. DOI:10.13433/j.cnki.1003-8728.2018.0506.
[2]凌濱,宋夢實.汽車自適應巡航系統車距控制策略研究[J].計算機仿真,2017,34(11):143-148. DOI:10.3969/j.issn.1006-9348.2017.11.030.
[3]陳學文,劉偉川,張進國,等.汽車巡航系統前方彎道關鍵目標識別研究[J].現代制造工程,2017,(7):80-84,120.DOI:10.16731/j.cnki.1671-3133.2017.07.016.
[4]高振海,嚴偉,李紅建,等.汽車自適應巡航線性參變間距控制算法[J].吉林大學學報(工學版),2016,46(4):1023-1029. DOI:10.13229/j.cnki.jdxbgxb201604002.
[5]魏守洋,鄒淵,李曉良,等.車輛聯網巡航控制研究[J].汽車工程,2018,40(3):290-296. DOI:10.19562/j.chinasae.qcgc.2018.03.008.
[6]劉偉,衛璐,孫芳岑,等.基于駕駛員實際跟車特性的自適應巡航系統研究[J].北京汽車,2018,(3):1-3,28. DOI:10.14175/j.issn.1002-4581.2018.03.001.
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 19:05:57
中國科技博覽(2016年19期)2016-10-19 13:51:05
中國科技博覽(2016年19期)2016-10-19 13:29:00
中國科技博覽(2016年18期)2016-10-19 11:35:03
中國科技博覽(2016年18期)2016-10-19 09:20:36
中國市場(2016年36期)2016-10-19 04:06:52
中國市場(2016年33期)2016-10-18 13:06:04
科技視界(2016年21期)2016-10-17 18:44:27
現代園藝(2016年17期)2016-10-17 07:24:22
科學與財富(2016年28期)2016-10-14 18:40:58
