磁吸式飛行器自主降落方法研究及實(shí)現(xiàn)
2019-10-24 05:31:30任麗莉楊惠策
長春師范大學(xué)學(xué)報(bào) 2019年10期
任麗莉,康 冰,于 海,楊惠策,于 彤
(1.長春師范大學(xué)高性能計(jì)算中心,吉林 長春 130032;2.吉林大學(xué)通信工程學(xué)院,吉林 長春 130022)
在現(xiàn)代的科技、軍事與生活中,海陸空的交互頻繁,無人機(jī)憑借其能夠靈活處理復(fù)雜工作情況的特性,已經(jīng)成為航空學(xué)術(shù)研究中新的前沿和熱點(diǎn)。例如,無人機(jī)在目標(biāo)搜尋、高空拍攝、軌跡追蹤等任務(wù)方面發(fā)揮著重要作用。但是由于數(shù)據(jù)傳輸、能源儲(chǔ)備等因素的限制,無人機(jī)需要實(shí)時(shí)與地面進(jìn)行交互并能夠在特定裝置上進(jìn)行數(shù)據(jù)傳送和能量補(bǔ)給。因此,為了更好地發(fā)揮無人機(jī)靈便精巧的特性,讓無人機(jī)在執(zhí)行工作任務(wù)時(shí),能夠跟蹤識(shí)別特定標(biāo)志或物體,并實(shí)現(xiàn)穩(wěn)定降落顯得尤為重要。高翔[1]設(shè)計(jì)了一套基于機(jī)載嵌入式平臺(tái)的無人機(jī)視覺輔助自主降落方案,該方案能夠?qū)崿F(xiàn)無人機(jī)自主跟蹤、降落在移動(dòng)平臺(tái)上的功能,但由于降落時(shí)攝像頭對(duì)圖像處理過程復(fù)雜,遠(yuǎn)近變焦處理困難,使得降落穩(wěn)定性較差,存在一定誤差,可能會(huì)出現(xiàn)脫離平臺(tái)的現(xiàn)象。為了彌補(bǔ)旋翼飛行器降落圖像處理方面的問題,本文闡述了磁吸式飛行器自主降落的方法。
1 顏色識(shí)別算法
本文采用如圖1的整體流程框架來完成目標(biāo)檢測(cè)與跟蹤。大體上的目標(biāo)檢測(cè)與跟蹤分為視頻流的單幀化、圖像的預(yù)處理、圖像的目標(biāo)檢測(cè)、圖像的目標(biāo)跟蹤。
1.1 圖像預(yù)處理
1.1.1 圖像的等比例尺寸變換
旋翼的目標(biāo)跟蹤的實(shí)質(zhì)是圖像識(shí)別以及無人機(jī)的反饋控制,為了控制的實(shí)時(shí)性,需要對(duì)圖像進(jìn)行有效的預(yù)處理,使圖像能夠被較為準(zhǔn)確的識(shí)別和處理。進(jìn)行圖像放縮的主流方法是圖像金字塔方法,它是圖像多尺度分析的有效方法。
常見的兩種圖像金字塔處理方法中,用于圖像重建的圖像金字塔方法稱為拉普拉斯圖像金字塔[2]。而用于等比例縮小的方法稱為高斯金字塔方法。針對(duì)于本文情況,選擇高斯圖像金字塔[3],從而方便圖形處理器的處理。高斯金字塔算法流程圖如圖2所示,本文直接引用OpenCV的C++庫函數(shù)pyrDown(src,dst,Size(src.cols/2,src.rows/2)),其中src是要處理的原圖像,dst是要處理的目標(biāo)圖像,而第三個(gè)參數(shù)的作用是將圖像的行數(shù)和列數(shù)縮小為原來的一半。在機(jī)載圖像處理器中,圖像尺寸的縮小變換也進(jìn)一步驗(yàn)證了金字塔圖像尺寸等比例變換的有效性。
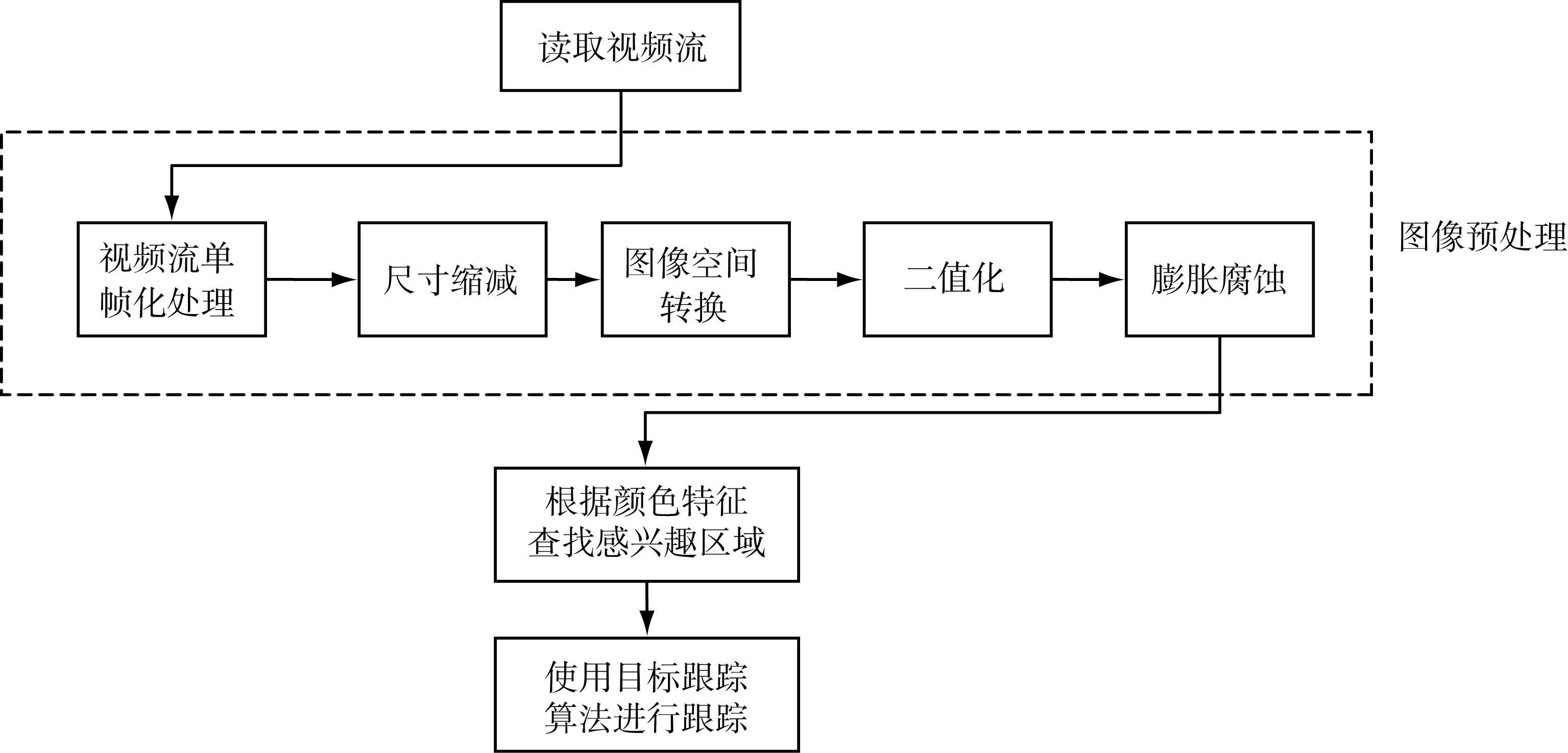
圖1 目標(biāo)跟蹤整體步驟
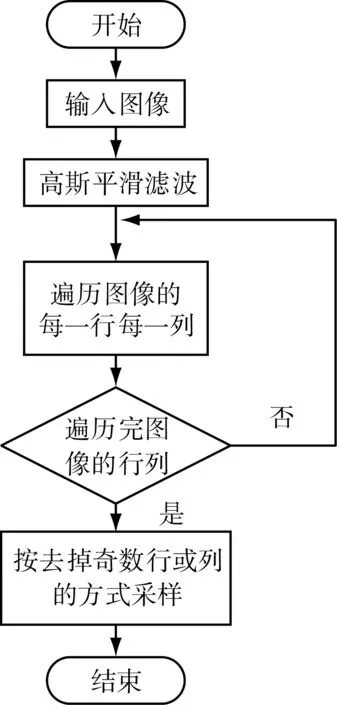
圖2 高斯金字塔算法流程圖
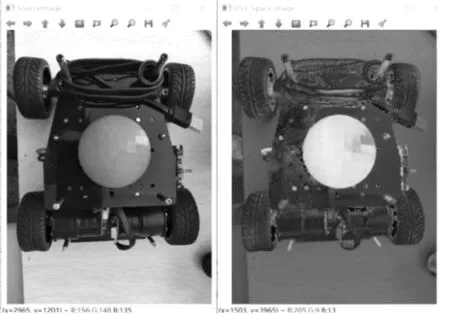
圖3 RGB空間圖像轉(zhuǎn)HSV空間圖像實(shí)例
1.1.2 圖像顏色空間轉(zhuǎn)換
由于圖像跟蹤中,目標(biāo)所處環(huán)境的光線明暗以及所使用的特征識(shí)別的標(biāo)志物本身顏色深淺都會(huì)對(duì)識(shí)別效果產(chǎn)生影響,因此,我們選擇將圖像空間進(jìn)行轉(zhuǎn)換。對(duì)于顏色空間的轉(zhuǎn)換,OpenCV提供了一個(gè)成熟的函數(shù)cvtColor(img,imgHSV,COLOR_BGR2HSV)[4],其中img表示原RGB空間圖像,而imgHSV是轉(zhuǎn)化后的HSV空間圖像,第三個(gè)參數(shù)是一個(gè)OpenCV常數(shù)。圖3是本文對(duì)一張圖片處理時(shí),其RGB空間的圖像和HSV空間的圖像對(duì)比。
1.1.3 圖像二值化處理
圖像二值化處理[5],每一行每一列的像素點(diǎn)是1×3矩陣,會(huì)拖慢處理速度。因此需要將圖像的數(shù)據(jù)量進(jìn)行縮減。在像素級(jí)別的圖像數(shù)據(jù)量縮減上,能夠采取的主要方法是降低通道數(shù)量,本文采用了二值化的方法進(jìn)行數(shù)據(jù)量縮減處理。
將RGB圖像二值化的方法是將每一個(gè)像素點(diǎn)中的3個(gè)子序列合并成為1個(gè)子序列,并且,在這個(gè)子序列中原本具備彩色效果的圖像將只有黑白兩種效果,該子列的取值為0~255,用來表示圖像二值化之后的灰度值。圖像二值化公式為:
(1)
其中,bl為最小灰度值,bu為最大灰度值。
在本文中,對(duì)HSV圖像進(jìn)行二值化,這樣有利于將具有某種特質(zhì)特征的目標(biāo)使用二值化的方法提取出來。圖4顯示了OpenCV框架下的二值化實(shí)例,該實(shí)例顯示的是將背景中的黑色中心位置突出顯示,顯示為二值化之后的白色。

圖4 圖像二值化之后突出顯示原圖像黑色中心點(diǎn)區(qū)域
1.2 基于顏色特征的運(yùn)動(dòng)目標(biāo)檢測(cè)
本文選用了目標(biāo)特征檢測(cè)方法實(shí)現(xiàn)目標(biāo)跟蹤。由于顏色特征較為直接,所以采用基于顏色特征的識(shí)別方式,即從每幀圖像當(dāng)中識(shí)別出預(yù)先設(shè)定的顏色。在OpenCV框架下,識(shí)別顏色特征的基本思路如圖5所示,基于此進(jìn)行了圖像顏色特征的檢測(cè)與識(shí)別[6]。由于二值化之后,圖像基本不包含亮度和飽和度信息,只包含顏色信息,因此,對(duì)每一幀圖像進(jìn)行遍歷。首先從每一行開始,從這一行的第一列開始,遍歷直至最后一列,從而判斷該列元素是否為二值化之后的白色部分。之所以可以通過判斷白色突出區(qū)域來判斷是否已經(jīng)尋找到目標(biāo),是因?yàn)楸疚牡膱D像二值化不是對(duì)RGB圖像進(jìn)行二值化,而是對(duì)HSV空間圖像進(jìn)行二值化,這樣可以將所有色相閾值在檢測(cè)范圍內(nèi)的元素全部二值化為白色區(qū)域,而沒有在此閾值范圍內(nèi)的全部二值化為黑色區(qū)域。遍歷完當(dāng)前行之后,標(biāo)記起始行數(shù)的位置以及起始列數(shù)的位置,然后進(jìn)行下一輪遍歷。在下一輪遍歷之后,倘若發(fā)現(xiàn)目標(biāo)像素的列數(shù)比已知列數(shù)小,則對(duì)剛才記錄的列數(shù)進(jìn)行更新,循環(huán)直至尋找到最后幾行,記錄最后的目標(biāo)所在行數(shù)和列數(shù)。進(jìn)行這些遍歷之后,實(shí)質(zhì)上,已經(jīng)找到了目標(biāo)的最小矩形邊界,以及這個(gè)邊界的長和寬。計(jì)算出這個(gè)矩形中心,即為目標(biāo)中心。最后,為了顯而易見,使用OpenCV自帶的畫邊框函數(shù),畫一個(gè)以目標(biāo)中心為中心,并且包含所有目標(biāo)區(qū)域的其他顏色的矩形框,該矩形框?qū)嶋H上表示的是我們所要檢測(cè)的運(yùn)動(dòng)目標(biāo)的像素點(diǎn)所在區(qū)域。這就相當(dāng)于可以通過計(jì)算矩形的中心得到物體的質(zhì)心,從而確定了物體在相機(jī)視野中的最大輪廓。再結(jié)合HSV的閾值,即可對(duì)運(yùn)動(dòng)目標(biāo)器進(jìn)行檢測(cè),圖像中的顏色檢測(cè)與識(shí)別就完成了。
1.3 基于顏色特征的MeanShift目標(biāo)跟蹤算法
視頻流在每一個(gè)幀所在的周期內(nèi),就是一張待處理的圖片。所不同的是,除了要將思路轉(zhuǎn)化為針對(duì)每一幀的處理之外,還需要使用更加有效的算法進(jìn)行目標(biāo)跟蹤,并防止目標(biāo)丟失,同時(shí)還要在每一幀圖像中提取目標(biāo)的相對(duì)位置信息,并將此作為四旋翼飛行控制的輸入信息。
1.3.1 視頻流中目標(biāo)跟蹤的總體流程
(1)讀取視頻流文件,獲取有效圖像信息。在視頻實(shí)時(shí)處理的過程中,為了避免造成視頻幀的遺漏,必須要首先確保視頻流文件的打開是否正確,即是否有視頻幀可以進(jìn)行有效處理。(2)圖像視頻幀預(yù)處理。為了保證視頻流跟蹤的準(zhǔn)確性,必須要通過顏色空間轉(zhuǎn)換,將原來比較復(fù)雜的RGB顏色空間中的圖像轉(zhuǎn)換為HSV空間中的圖像進(jìn)行處理。(3)去除圖像噪聲。采用膨脹和腐蝕操作來填充物體內(nèi)的細(xì)微空缺像素并平滑處理圖像的邊界,從而為目標(biāo)跟蹤創(chuàng)造良好的條件,避免圖像跟蹤中的算法誤判。(4)圖像輪廓檢測(cè)與選取,由于圖像輪廓的檢測(cè)具有較快的算法運(yùn)行速度,因此可以檢測(cè)全部輪廓,在排除外界干擾的情況下,圖像的最內(nèi)側(cè)輪廓即為目標(biāo)物體的輪廓。(5)根據(jù)顏色特征選取需要研究和處理的圖像的部分區(qū)域,根據(jù)(4)中的分析可知,為了減少輪廓檢測(cè)的誤判,需要確定目標(biāo)物體是否具有特定的輪廓和顏色特征。(6)使用目標(biāo)跟蹤算法進(jìn)行目標(biāo)跟蹤,為了保證處理的實(shí)時(shí)性,本文選用MeanShift算法進(jìn)行目標(biāo)跟蹤。

圖5 基于顏色特征的目標(biāo)檢測(cè)程序流程圖
1.3.2 MeanShift跟蹤算法設(shè)計(jì)
MeanShift算法[7]即為均值飄移算法,其本身的運(yùn)行依靠對(duì)偏移值的迭代進(jìn)行,也就是首先計(jì)算當(dāng)前位置區(qū)域的平均偏移值,然后將當(dāng)前點(diǎn)作為新的起點(diǎn),迭加移動(dòng)相應(yīng)偏移值直至移動(dòng)到目標(biāo)位置。
MeanShift算法的數(shù)學(xué)定義源于MeanShift向量。MeanShift向量的基本定義形式為:
(2)
對(duì)于給定的多維空間的n個(gè)樣本點(diǎn)xi,x=1,2,…,n,當(dāng)發(fā)生偏移時(shí),將會(huì)有k個(gè)樣本歸為球Sh所在的區(qū)域,球Sh定義了一個(gè)高維區(qū)域,該高維區(qū)域的表達(dá)式為:
(3)
在上述的推導(dǎo)過程中,僅僅是在宏觀的概率分析中做的推導(dǎo),這就忽視了樣本點(diǎn)之間距離的影響,因此,引入核函數(shù)進(jìn)行進(jìn)一步的推理。常見的核函數(shù)包括單調(diào)核函數(shù):
(4)
和高斯核函數(shù):
(5)
引入核函數(shù)之后MeanShift算法表達(dá)形式為:
(6)
其中,w(xi)是采樣點(diǎn)的權(quán)重系數(shù)。
以上是對(duì)MeanShift算法中相關(guān)向量進(jìn)行的數(shù)學(xué)推導(dǎo),但是,當(dāng)MeanShift算法應(yīng)用到跟蹤領(lǐng)域時(shí),需要建立一個(gè)跟蹤模型來對(duì)整體目標(biāo)跟蹤過程進(jìn)行描述。
首先,在起始幀,通過上述基于顏色特征的目標(biāo)檢測(cè)方法,得到了需要處理的感興趣區(qū)域,將此區(qū)域進(jìn)行幾何量化,轉(zhuǎn)化為一個(gè)長方形區(qū)域。假設(shè)該區(qū)域的中心為x0,對(duì)于整體圖像的n個(gè)像素點(diǎn)中的m個(gè)特征點(diǎn)的特征密度估計(jì)為:
(7)
運(yùn)動(dòng)目標(biāo)在第二幀及之后每幀中出現(xiàn)的區(qū)域中心假設(shè)為y0,則此時(shí)包含特征點(diǎn)區(qū)域的特征密度估計(jì)為:
(8)
對(duì)于兩次的候選區(qū)域,以第一幀中所得到的相似率為基準(zhǔn),使用巴氏距離系數(shù)作為近似函數(shù),計(jì)算第二幀及以后幀的相似性:
(9)
f(y)的值是一個(gè)概率分布值,值越大,表明前后兩幀圖像的相似性越接近,兩個(gè)先后模型的相似程度越高。接下來需要對(duì)目標(biāo)的位置進(jìn)行確認(rèn),這時(shí)計(jì)算MeanShift向量的變化值,不斷迭代,直至變化值小于規(guī)定閾值,則變化值最小的位置即為目標(biāo)的位置。式(10)反映了這種迭代計(jì)算的過程。
(10)
本文所設(shè)計(jì)的基于顏色特征的目標(biāo)跟蹤算法的程序流程如圖6所示。
2 磁吸式捕獲旋翼飛行器實(shí)驗(yàn)裝置
2.1 捕獲裝置結(jié)構(gòu)介紹
在跟蹤結(jié)束后,旋翼飛行器進(jìn)行降落,為了彌補(bǔ)降落時(shí)出現(xiàn)的圖像處理困難等問題,設(shè)計(jì)了一個(gè)旋翼捕獲裝置,該裝置下部為一個(gè)矩形的硬質(zhì)絕緣板,板的中間放置超聲波模塊,四個(gè)角裝有四個(gè)升降平臺(tái),該升降平臺(tái)通過步進(jìn)電機(jī)控制進(jìn)行升起降落。四個(gè)升降平臺(tái)支撐上部的一個(gè)矩形硬質(zhì)板并與硬質(zhì)板固定連接,上部的硬質(zhì)板中心處挖空,正對(duì)下方板上放置的超聲波模塊。上板根據(jù)所要捕獲旋翼機(jī)臂的個(gè)數(shù),挖出相應(yīng)數(shù)量的圓孔,用于放置電磁鐵,并將旋翼所能夠識(shí)別的標(biāo)志粘貼在上方板上。
2.2 磁吸式自主升降捕獲裝置工作流程
放置在降落平臺(tái)上中間的一個(gè)超聲波測(cè)距模塊實(shí)時(shí)監(jiān)測(cè)上方旋翼相對(duì)平臺(tái)的距離,當(dāng)監(jiān)測(cè)到旋翼距平臺(tái)距離為20~25 cm時(shí),向最小控制系統(tǒng)STM32單片機(jī)的管腳發(fā)送低電平信號(hào)。

圖6 基于顏色特征的目標(biāo)跟蹤算法程序流程圖
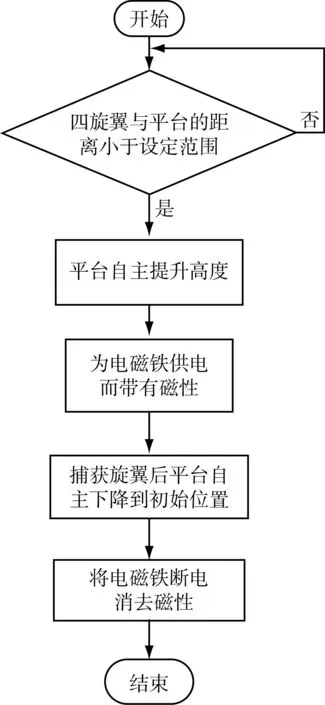
圖7 磁吸式自主升降捕獲裝置工作流程圖
單片機(jī)實(shí)時(shí)監(jiān)測(cè)管腳電平的變化情況,當(dāng)接收到由超聲波模塊發(fā)送的低電平信號(hào)時(shí),STM32單片機(jī)對(duì)電機(jī)驅(qū)動(dòng)發(fā)送上升指令,使平臺(tái)上升。同時(shí),與繼電器相連接的單片機(jī)管腳會(huì)由開始的下拉狀態(tài)變?yōu)樯侠瓲顟B(tài),繼電器觸點(diǎn)閉合,進(jìn)而電源會(huì)給電磁鐵陣列供電,使電磁鐵帶有磁性。
隨著降落平臺(tái)高度的增加,當(dāng)降落平臺(tái)與旋翼機(jī)臂下磁性圓盤的距離足夠小時(shí),平臺(tái)會(huì)瞬間對(duì)旋翼進(jìn)行吸引,使其降落并固定到平臺(tái)上,完成對(duì)旋翼飛行器的捕獲。
捕獲完成穩(wěn)定后,單片機(jī)發(fā)送下降命令給電機(jī)驅(qū)動(dòng),使電機(jī)緩慢豎直下降,當(dāng)降落到初始的最低高度后,與繼電器相連的單片機(jī)管腳再次下拉,使觸點(diǎn)斷開,平臺(tái)消除磁性,此時(shí),可以從平臺(tái)上取回旋翼,捕獲過程結(jié)束。全過程流程如圖7所示。
3 測(cè)試與分析
為了驗(yàn)證本文所述算法以及旋翼捕獲平臺(tái)的可靠性和穩(wěn)定性,在室外的無人廣場(chǎng)區(qū)進(jìn)行試驗(yàn)工作,場(chǎng)地大小為40 m×20 m。將升降平臺(tái)裝在小推車上,移動(dòng)平臺(tái)上貼有供旋翼識(shí)別的顏色標(biāo)志,讓旋翼在不同高度、不同速度條件下測(cè)試降落平臺(tái)的捕獲精度和捕獲時(shí)間。將升降平臺(tái)上板中間設(shè)為參考點(diǎn),測(cè)量旋翼中心偏離上板中心的距離作為偏離距離,當(dāng)旋翼距離平臺(tái)20 cm時(shí)開始計(jì)時(shí)。
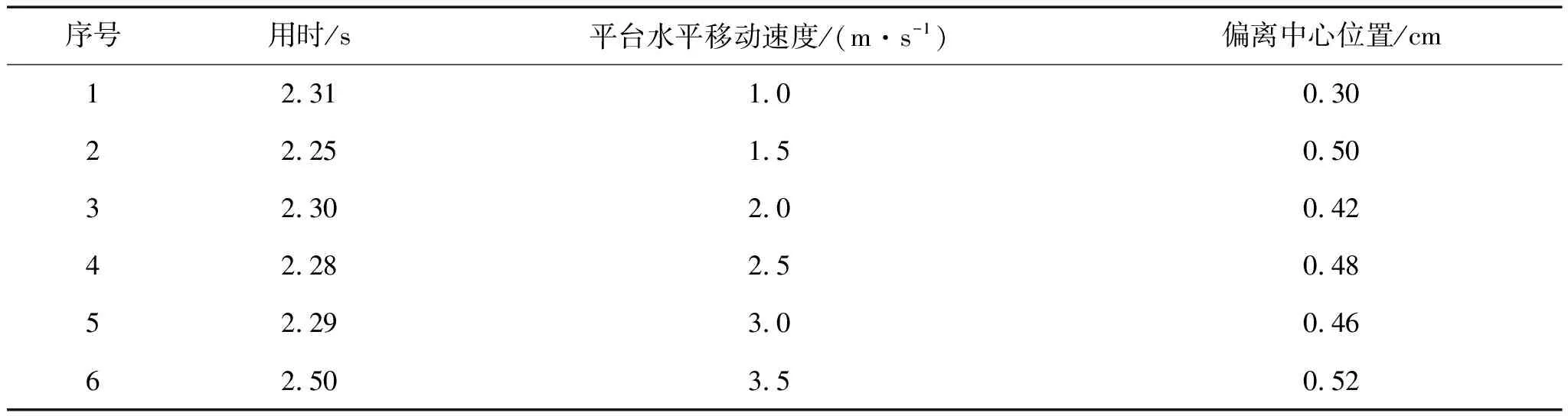
表1 不同條件的測(cè)試結(jié)果
4 結(jié)論
本文利用視頻圖像處理以及Meanshift算法進(jìn)行目標(biāo)跟蹤,讓旋翼飛行器對(duì)目標(biāo)進(jìn)行識(shí)別,降落時(shí),用磁吸式平臺(tái)對(duì)旋翼進(jìn)行捕獲,使旋翼能夠吸附在平臺(tái)上,達(dá)到穩(wěn)定降落的目的。實(shí)驗(yàn)結(jié)果表明,該降落裝置能夠使旋翼穩(wěn)定地停在平臺(tái)上,實(shí)現(xiàn)穩(wěn)定安全降落。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
 長春師范大學(xué)學(xué)報(bào)2019年10期
長春師范大學(xué)學(xué)報(bào)2019年10期
- 長春師范大學(xué)學(xué)報(bào)的其它文章
- 校企協(xié)同育人機(jī)制下體育產(chǎn)業(yè)人才培養(yǎng)模塊化實(shí)訓(xùn)模式研究
- 基于可持續(xù)發(fā)展視角的現(xiàn)代服務(wù)業(yè)發(fā)展能力評(píng)價(jià)研究
- 音樂治療團(tuán)體輔導(dǎo)對(duì)大學(xué)生社交焦慮的干預(yù)研究
- 幼師生職業(yè)自我效能來源問卷的編制及信效度檢驗(yàn)
- 基于SPOC的線上線下混合教學(xué)模式探究與實(shí)踐
- 基于遙感技術(shù)的環(huán)巢湖區(qū)域濕地景觀格局及可持續(xù)設(shè)計(jì)