控制類在線開放實驗課程的設計實現
2019-11-26 07:29:26趙林惠趙翔康戴亞平
實驗室研究與探索 2019年10期
趙林惠, 王 園,, 趙翔康,, 戴亞平
(1.北京市智能機械創新設計服務工程技術研究中心,北京 100020;2.北京理工大學 自動化學院,北京 100081)
0 引 言
隨著互聯網的發展,網絡化實驗教學在世界范圍內引起了廣泛的重視。日本東京工科大學Yasuhiro等人早在1999年就完成了針對控制工程的網絡化實驗系統的搭建,2001年悉尼科技大學David Lowe等[1]建立了遠程控制實驗室。在國內,劉萍先等[2]構建了網絡控制虛擬實驗室,學生通過Internet可以完成倒立擺和水箱控制的實驗,通過虛擬實驗系統開發和驗證智能控制算法;Dai等[3]在2006年提出了混合架構的網絡資源共享和遠程控制實驗室,實現了一些復雜非線性系統的控制實驗,包括球桿系統,單自由度機械臂系統,直升機和倒立擺系統等,學生可以通過PC端進行傳統PID控制和各類智能控制算法控制下位機的非線性硬件系統進行實驗。雖然針對互聯網進行網絡化控制實驗的技術已經得到了實用性進展,卻因為學生依然不得不依靠電腦上網完成實驗,使得網絡化實驗教學依然不能夠做到“隨時”“隨地”與“便攜式”,這在移動互聯網時代,與充分利用碎片化時間進行學習的需求是不相符合的。
2015年,國務院發布了關于積極推進“互聯網+”行動的指導意見,推動“互聯網+”高等教育教學改革一直受到教育部門的充分重視。高校教改的主要目標就是培養學生的創新意識與動手能力[4]。當今教育領域最熱門的改革當屬網絡在線學習平臺MOOC的興起,但很容易發現,MOOC的課程入學率高,輟學率卻同樣高。尤其是針對自動化專業這樣的工科學生,僅僅有理論課件,沒有提供其動手實踐的實驗課程,很容易讓學生產生“隔靴搔癢”之感。如果僅僅給學生提供線上視頻理論課程的教學,學習者很難堅持完成全課程的學習。目前MOOC平臺上與自動化學科相似的工程類課程配套的實驗課程寥寥無幾,在全國大學MOOC平臺上僅有國防科學技術大學針對大學物理實驗課程搭建了虛擬的實驗系統[5]。因此,開發遠程端MOOC實驗教學系統,對于在線理論課程的輔助教學方面具有非常重要的意義[6-7]。
目前全國大學MOOC在線課程大約有740門,其中需要實驗的課程有230余門。在這些在線課程中,實驗部分僅僅是理論教學的一部分,成績占到10%~50%不等,課程還是以理論教學為主,并沒有讓學生參與動手的實驗課程。在線的獨立實驗課程只有11條結果,僅占總課程的1.4%,包括生物、化學、物理、數學、計算機和電子電路學科,在這11門實驗課程中,幾乎全是采用虛擬仿真軟件進行實驗,沒有實物硬件設備實驗。因此,如何把實物實驗傳送到互聯網,允許學生“隨時”“隨地”與“便攜式”地進行遠程實驗操作,成為控制學科附有挑戰性的科研課題[8]。
移動互聯網時代的到來,深刻影響、改變著傳統的生活,人們對手機的要求已不局限于發信息和通電話功能。截至2016年2月,中國網民規模達6.88億人,其中學生群體的占比最高,為25.2%,基本上99%的學生使用智能手機。針對90后大學生對新興事物具有較高的敏銳性,將手機移動互聯應用于實驗教學不僅能夠提高學生對實驗課學習的興趣,在培養其自主學習能力方面更是意義非凡。
本文探討基于手機、平板電腦移動互聯的遠程控制實驗(Mobile Remote Control Experiment,MRC-Experiment)教學系統,將實驗課程也制作成MOOC網絡公開課程,并允許學生通過移動端登錄本實驗教學系統進行遠程在線實驗,而現在的MOOC網站也都有自己的移動端,因此,學生都可以通過移動端進行在線課程學習與在線遠程實驗操作。在實驗過程中,學生能夠觀察到響應曲線、控制指標與控制效果。教師可以利用在線民意測驗的結果來判定學生對于課程的滿意度,進行實驗教學效果分析[9]。
本文的主要工作有:①提出移動實驗室(M-Lab)的設計原理,選擇主流的Hybrid APP架構。采用單自由度機械臂為被控對象,完成在線的實驗課程內容設計。②運用智能控制算法(遺傳PID)進行實驗在線課程的設計與實現;運用Matlab仿真結果與M-Lab的實物實驗結果對比,驗證在線實驗系統的可行性。③對M-Lab實驗效果調查與分析,對滿意度歸納總結。
1 M-Lab設計原理
1.1 M-Lab的內涵
如果要實現一個基于移動互聯網的實驗室,最重要的技術是允許手機登錄實驗室,進行網絡化的控制實驗,故提出了M-Lab的概念,在M-lab方式下進行的控制類實驗,稱為MRC-Experiment。
(1) M-Lab的構成與工作原理。在互聯網環境下,建立起網絡數據的通信傳輸機制,允許用戶使用手機以及移動設備遠程登錄網絡化實驗室頁面。在用戶的手機端可以遠程操作實驗室的實驗設備,進行控制實驗。該實驗室可以提供實驗結果數據,經過移動互聯網媒介反饋給用戶。
移動實驗室的構成如圖1所示。
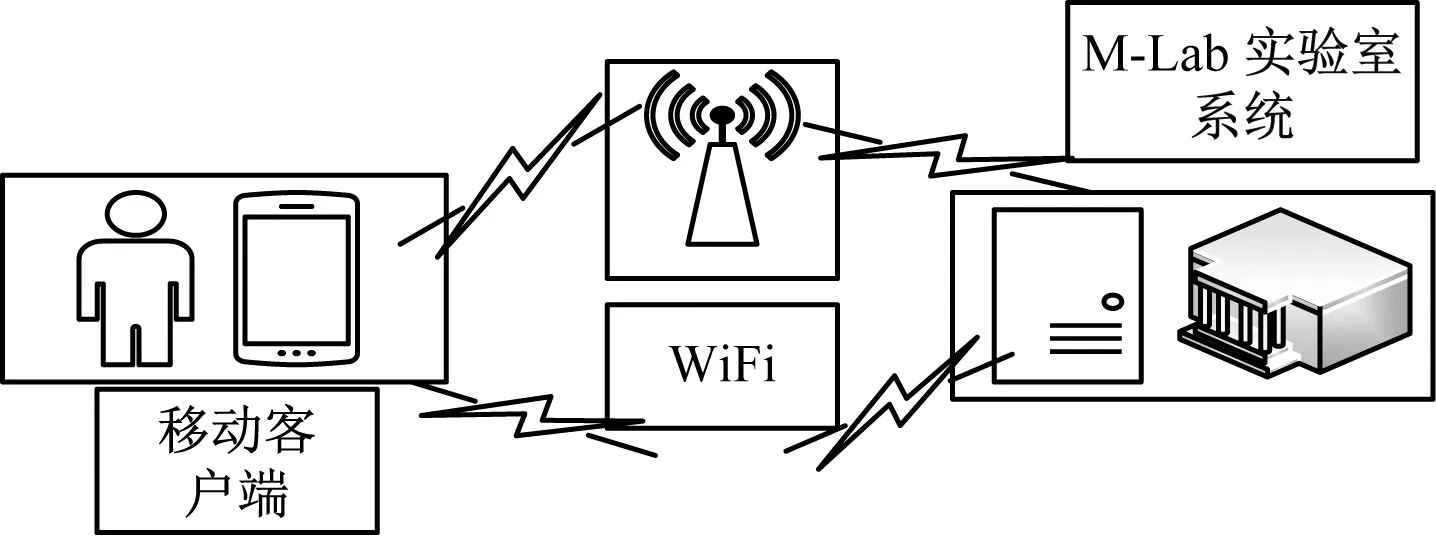
圖1 用戶與實驗室關系圖
(2) MRC-Experiment的工作原理。用戶可以通過移動終端設備(手機,平板電腦)進行的工程實驗稱為移動實驗。在MRC-Experiment中,用戶可以通過無線網遠程控制被控對象,不僅可以改變實驗參數,也可以上傳自己的控制算法,實驗后在線獲得實驗數據與實驗曲線,MRC-Experiment的工作原理圖見圖2。
1.2 M-Lab的技術實現
1.2.1 M-Lab網絡架構設計
移動端實驗平臺是建立在學生移動智能設備上的控制終端APP,目前可選的結構有:Native APP、Web APP、Hybrid APP,3種結構對比見表1。
由表1可知,選取Hybrid APP為移動端實驗平臺設計結構,從而兼具“一次開發、多平臺運行”的能力與調取底層設備的能力,可以降低開發成本,同時具有良好的擴展性能與維護性能。


圖2 移動遠程控制實驗的工作原理圖
作為移動端實驗平臺,其核心是實驗功能,輔之以信息管理功能,所以圖像渲染并非其主要考慮因素,故不對圖像渲染能力做過高要求,Hybrid APP能夠提供的圖像渲染能力已足夠。因此移動實驗室的框架搭建,選擇Hybrid APP架構來完成。
1.2.2 被控對象的選擇
針對控制實驗的倒立擺、恒溫箱、機械臂等裝置,都可以連接到本文設計的實驗平臺上,為了節省成本,使用自動化學院遠程控制實驗室的產品——單自由度機械臂為被控對象[10],如圖3所示。

圖3 單自由度機械臂實物圖
單自由度機械臂的特色:
(1) 是一個典型的二階系統,可以進行各種控制類算法的實驗。
(2) 易于攜帶,可以作為教師在教室的實驗演示設備,并允許學生在任何互聯網覆蓋的地方登錄到移動端遠程控制實驗室,對該被控對象進行控制實驗。
1.3 MOOC平臺的控制實驗課程內容設計
基于自動控制理論的MOOC實驗課程,包括預備知識、經典控制算法、智能控制算法及算法設計等多個章節的課程內容,經典控制算法適應于本科生教學,智能控制算法適應于研究生教學,為了加強學生基于實驗課程的應用型教學[11],課程內容以算法應用為主進行講解,以此提高學生的學習效率。
本系統下MOOC課程內容的設計方案如圖4所示。

圖4 MOOC平臺的實驗課程內容設計方案
1.4 移動遠程控制實驗室的設計與實現
在移動互聯網環境下,運用標準Java接口與HTTP網絡通信機制,開發了一套基于移動端的APP實驗教學軟件系統(M-Lab APP),以Web形式展示。用戶的手機端(或者平板電腦等移動設備)可下載APP軟件,遠程操作實驗室的實驗設備,進行控制實驗。M-Lab擁有數據庫,用來保存用戶的實驗結果數據,可通過APP實驗報告模塊將實驗結果反饋給用戶。為了加強用戶的真實體驗感,加入了視頻監控設計,通過攝像頭實時采集實驗過程,用戶通過登錄一款第三方“超級看看APP”軟件,可以實時觀看實驗的動態過程。
移動端遠程控制實驗室的組成如圖5所示。
2 智能控制算法(遺傳PID)的在線實驗課程的設計實踐
使用了一種智能控制方法——遺傳PID算法,來展示一套在線實驗課程(MOOC)的設計與實現。
2.1 遺傳PID的實驗教學理念與課程設計
首先要教給學生的是如何設計一套遺傳PID控制器,理論教學內容中包含了遺傳算法的基本概念:①初始化種群;②選擇、交叉和變異;③適應度函數的構建;④將遺傳算法與PID的結合。這4部分先用PPT給學生展示,并強調這幾部分都是影響控制精度的重要因素。讓學生思索,為什么這4部分會影響到控制精度。
在“選擇”的實驗課程中,主要解決以下幾個知識點的教學與實驗問題:①遺傳算法如何進行“選擇”?②什么是輪盤賭方法?③如何確定選擇哪個個體?
選擇操作只能選出種群中一些優秀的個體,并不能產生新的染色體,而“交叉”能夠產生新的染色體。針對交叉的教學采用Matlab仿真的方式展示給學生,讓學生理解遺傳算法的交叉步驟[12-14]。交叉方式選擇3點交叉,本文選用的每一個個體,代表著PID 3個控制參數,使用3點交叉,能夠保證每個參數都能得到交叉。交叉后產生2個個體,隨機選擇1個個體保存下來。當交叉不執行的時候,保存適應值更高的父代個體,基于GA算法參數調整的PID控制系統如圖6所示。

圖5 M-Lab組成

圖6 基于GA算法參數調整的PID控制系統
為了獲取滿意的控制系統的過渡過程動態特性,采用誤差絕對值時間積分性能指標作為目標函數,在目標函數中加入控制輸入的平方項是為了防止控制量過大。目標函數越小,系統的控制性能越好。在實驗中為避免超調,采用了遺傳算法的處罰功能,將超調量作為最優指標的一項,目標函數為:
(1)
式中:e(t)為系統誤差;u(t)為控制器輸出;tu為上升時間;δ(t)為超調;w1,w2,w3,w4為加權值,其中w4>>w1。
目標函數的教學與實驗,可以將權值作為實驗參數,經過更改權值,獲得最佳的目標函數。
在控制系統里,J值越小,對應的PID參數越優良,控制性能越好,由于遺傳算法按照最大化方向進行搜索,GA算法用于求解最大值問題,所以適應度函數取目標函數的倒數,f=1/J。根據適應度和選擇準則選出保留到下一代的個體,組成新的種群又作為算法的當前種群。
2.2 實驗操作過程設計
把初始化、交叉、變異、適應度函數選取、遺傳PID控制器設計4個部分提取出來,分別建立模快,讓學生自己更改參數,來進行反復實驗,以取得更好的控制效果,并且加深對遺傳PID控制器設計的理解,遺傳算法實驗設計的流程示意圖如圖7所示。

圖7 遺傳算法實驗的課程設計示意圖
首先初始化種群,根據實驗裝置——單自由度機械臂的參數,推薦學生選擇遺傳算法的尋優區間為[0,10]。遺傳代數為100,將種群規模定為30,個體基因序列長度為30,包含了3個控制參數,每個參數的基因長度為10,個體基因采用二進制編碼,基因序列由0和1組成,在計算機中由round和random函數產生,round函數的功能為四舍五入,random函數的功能為產生一個0到1之間的隨機數,基因組成個體,個體組成種群,個體數達到種群規模時,初始化結束[15-16]。
然后開始選擇、交叉與變異的實驗。①進行基于Matlab仿真確定最優參數的實驗演示;②給出選擇、交叉、變異過程中的圖像化教學,形象地在實驗MOOC中給出在哪一代得到了最優的PID參數以及目標函數J的值;③將最優的PID參數控制本實驗系統的機械臂裝置,與Matlab仿真結果進行對比。
為了獲取滿意的過渡過程動態特性,采用誤差絕對值時間積分性能指標作為目標函數,在目標函數中加入控制輸入的平方項是為了防止控制量過大。目標函數越小,系統的控制性能越好。在實驗中為避免超調,推薦學生采用遺傳算法的處罰功能,將超調量作為最優指標的一項,目標函數為:
(2)
式中:e(t)(e(t)<0)為系統誤差,u(t)為控制器輸出,tu為上升時間,δ(t)為超調。經過調試程序,權值取值如下:w1=0.999,w2=0.001,w3=2,w4=100。
遺傳算法按照最大化方向進行搜索,適應度函數取目標函數的倒數,f=1/(J+1×10-10)。目標函數J+1×10-10是防止分母為零。根據適應度和選擇準則選出保留到下一代的個體,組成新的種群作為算法的當前種群。
停止準則的設計:最優個體的適應度連續n代(n由學生實驗中自行確定)未變,則終止實驗。指導學生將算法一直執行求出最大的平均適應度,終止準則為進化子代的平均適應度接近或者比該最大平均適應度更大。
本實驗系統選擇最簡單的迭代次數作為停止準則,經過測試,當迭代次數滿足100次以后,目標函數幾乎收斂到最小值,滿足停止準則算法輸出解碼后的最優個體并結束。用Matlab得到最優參數的仿真結果——目標函數J隨進化代數的變化曲線如圖8所示;PID參數為最優值時,J=9.775,進化代數為100,PID最優參數時系統的階躍響應如圖9所示,再將最優的PID參數在實驗系統上進行測試。

圖8 目標函數J隨進化代數的變化曲線
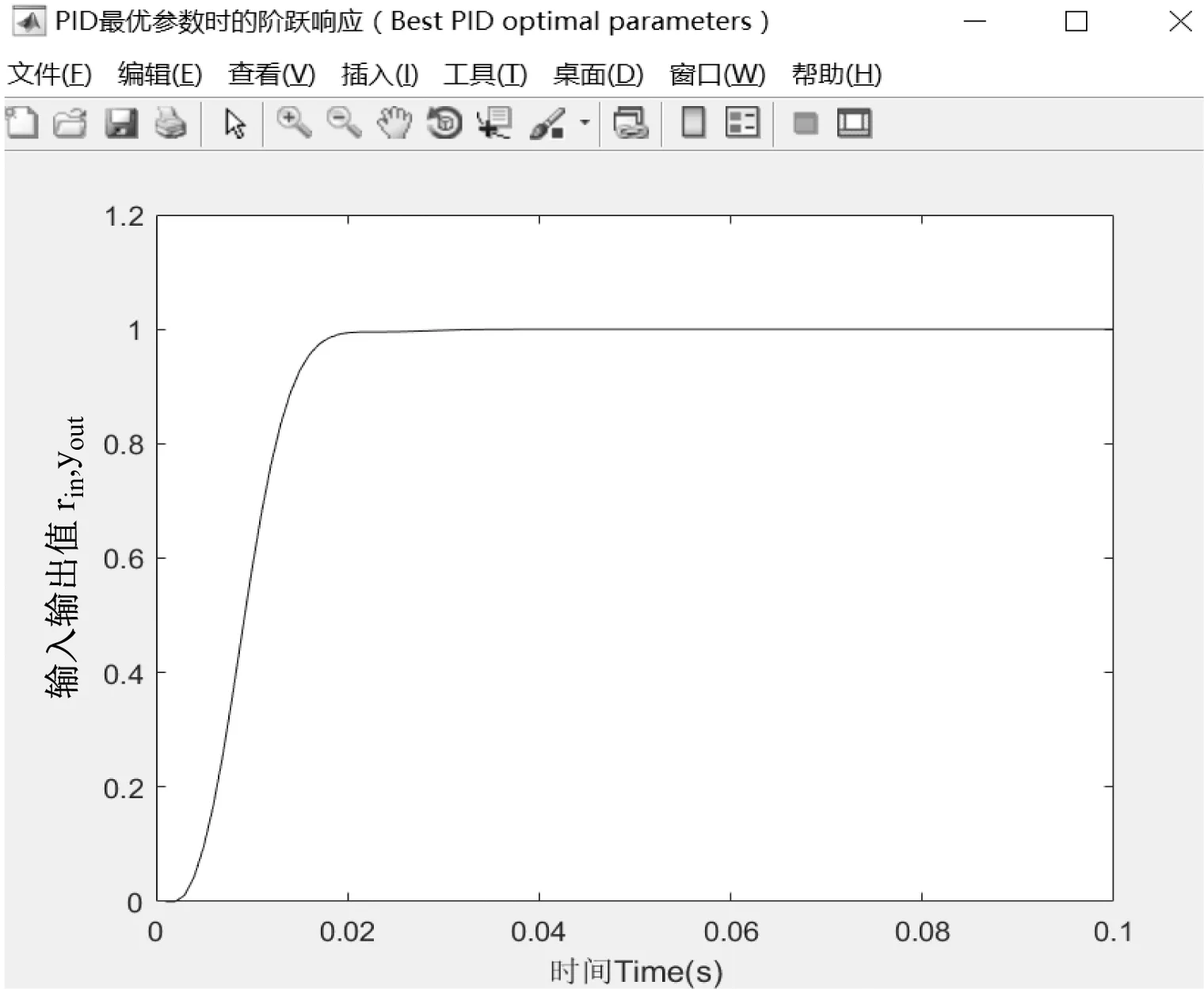
圖9 PID最優參數時系統的階躍響應
2.3 實驗結果對比
2.3.1 Matlab仿真實驗
為驗證遺傳PID算法是否能夠控制機械臂系統,先根據遺傳算法輸出的PID控制參數進行仿真實驗,選取了兩組PID參數,結果如下:
第一組參數選擇:Kp=4.92,Ki=4.54,Kd=0.63,結果如圖10(a)所示;
第二組參數選擇:Kp=5.32,Ki=4.68,Kd=0.70,結果如圖10(b)所示。其中rin表示機械臂位移的參考輸入值(設為1.0),yout表示實際輸出值。

(a) 第一組

(b) 第二組
圖10 兩組參數的Matlab仿真圖
仿真結果分析:運行算法后,經過100次迭代可以近似認為目標函數已收斂到最小,滿足停止準則。算法每次運行后輸出的控制參數不一定是最優解,絕大多數是最優解的近似解,本文隨機抽取了運行后的2組控制參數進行實驗,由仿真圖可以看出,輸出參數的控制效果滿足系統要求,驗證了遺傳算法最后整定出的PID參數確實具有可行性。
2.3.2 機械臂實物控制實驗
在機械臂實物控制實驗中,遺傳PID算法實驗以及后面的控制實驗中,機械臂的目標角度位置均設為360°,實驗電壓均為12 V。因為經過仿真實驗證實遺傳PID控制參數能夠控制實驗系統,故選取如下兩組PID參數進行機械臂的實物控制實驗。
實驗結果如下:
PID參數取值:Kp=4.92,Ki=4.54,Kd=0.63,結果如圖11(a)所示;
PID參數取值:Kp=5.32,Ki=4.68,Kd=0.70,結果如圖11(b)所示。
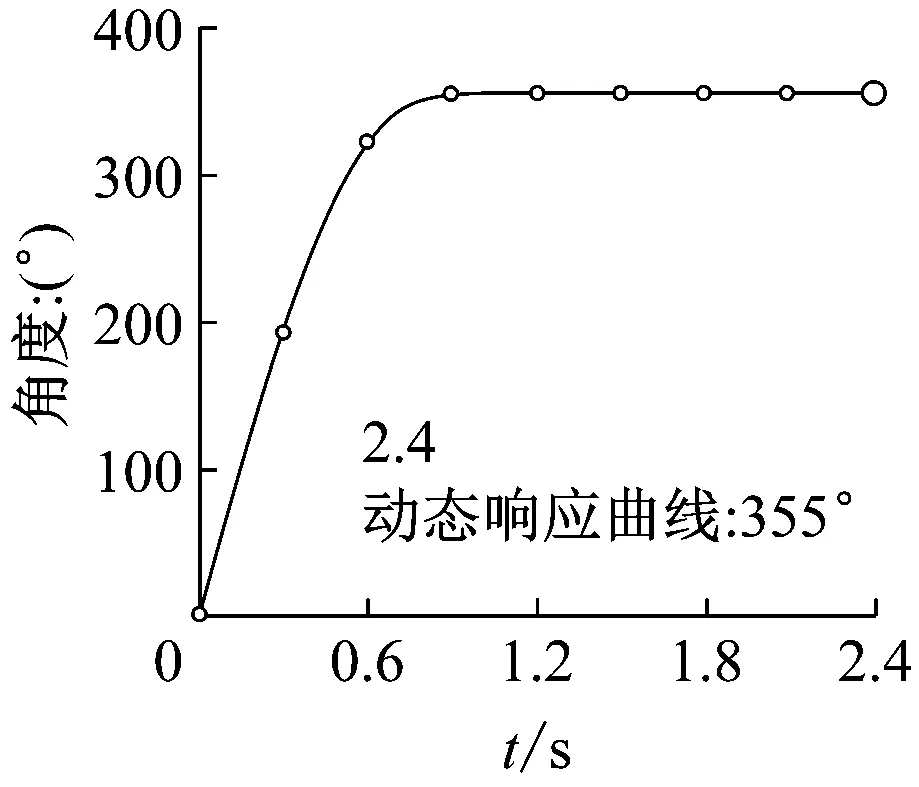
(a) 第一組

(b) 第二組
圖11 兩組參數的機械臂控制實驗圖
實驗結果分析:機械臂實物控制實驗中,機械臂的實驗控制參數與Matlab仿真獲得的控制參數能夠做到一一對應。由圖11可以看出,系統無超調,調節時間為1 s,設定位置360°,穩態誤差絕對值分別為5°和10°,滿足了機械臂系統的控制指標要求,但穩態誤差不同,可令學生反復試驗進行參數整定。
3 實驗效果調查與分析
為了檢驗移動實驗室中的移動遠程控制實驗是否使實驗操作更加便捷,是否能夠提高實驗設備利用率,以及是否能夠提高學生的學習效率,邀請了自動化學院20名大四學生、10名研一學生和10名研二學生使用M-Lab進行MRC-Experiment實驗。設計了一套調查問卷,實驗結束后由學生填寫調查問卷。
調查問卷從M-Lab系統功能、M-Lab系統特色、學習效果兩大角度設計共9個問題,為了能夠更精細地了解學生對各問題的滿意程度,此次調查問卷的評價方式采用打分制,即學生可以對每個問題進行打分,總分10分,8分及以上為非常滿意,6分或7分為滿意,5分為一般,3分或4分為不滿意,2分及以下為非常不滿意。調查問卷的反饋結果見表2~4。

表2 M-Lab系統功能反饋歸納表

表3 M-Lab系統特色反饋歸納表
在設計的調查問卷的后半部分,邀請每個學生提出3個有待繼續解決的問題。針對學生提出的問題,最有代表性的問題歸納為3類,①實驗項目較少,②被

表4 學習效果反饋歸納表
控對象種類較少,③控制效果實時性難以保證(移動互聯網的網絡延時導致)。因此擴展底層設備與實驗項目,給予更清晰的實驗教學指導,是M-Lab今后的發展方向。
在調查問卷中最后一個問題是“如果您可以選擇M-Lab中的MRC-Experiment或傳統實驗方式來進行實驗,您會選擇哪一種?”,調查結果是100%的受訪者愿意選擇MRC-Experiment進行實驗。
4 結 語
本文針對控制類實驗課程的在線教學,研究并設計了一套基于MOOC教學的自動控制理論實驗課程。在提出了M-Lab與MRC-Experiment的基本原理與設計方法基礎上,依托單自由度機械臂系統為被控對象,建立了一套移動端遠程控制實驗教學系統,實現了MOOC的在線實驗教學。本實驗教學系統可以完成校園網環境下的M-Lab的設計與實現,并允許學生進行MRC-Experiment。本實驗教學系統還存在一些問題(網絡延時、網絡安全、多用戶并發),這正是下一步要解決的研究課題。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
內蒙古教育(2021年20期)2021-03-08 01:09:14
甘肅教育(2020年4期)2020-09-11 07:42:36
計算機教育(2020年5期)2020-07-24 08:53:38
物理之友(2020年12期)2020-07-16 05:39:20
甘肅教育(2020年8期)2020-06-11 06:10:04
家庭影院技術(2019年11期)2019-12-09 09:14:30
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國教育技術裝備(2016年11期)2016-12-01 06:53:03
發明與創新(2016年38期)2016-08-22 03:02:52
