全地形移動機器人懸架減振機構動力學研究
2019-12-17 02:06:00黃玉成許德章
安徽工程大學學報 2019年5期
關鍵詞:移動機器人
黃玉成,許德章
(安徽工程大學 機械與汽車工程學院,安徽 蕪湖 241000)
隨著人們對未知世界的不斷探索,人類所使用的移動載體不斷變化。人們在探查危險復雜的環境時,全地形移動機器人發揮著至關重要的作用,協助探測并保障探險過程中人類生命安全[1-2]。全地形移動機器人在小區戶外巡檢、農場農作物檢測以及戶外運輸方面同樣發揮著重要作用,讓人類從復雜危險的勞動環境中解放出來,提高了生產效率并降低了勞動成本。全地形移動機器人的可靠運行是保障以上工作能夠順利完成的重要前提,而車身運動穩定性是其可靠運行的重要前提[3],因此對改善機器人車身運動穩定性的研究具有重要意義。改善機器人運行顛簸程度的方法數不勝數,如通過預先編制智能算法來控制車身運動姿態,從而改善車身振動程度[4];通過設計出不同類型的行走部件,改善行走部件與地面的貼合度,進而改善車身振動狀態[5]。實驗主要研究移動機器人的懸架減振機構,利用懸架減振機構來改善移動機器人車身振動。通過對獨立懸架減振機構進行動態分析,確定影響懸架減振機構減振效果主要參數,并通過仿真實驗分析,確定懸架減振機構的減振器參數取值范圍,完成全地形移動機器人懸架減振機構的參數設置,使機器人具有良好的減振效果。
1 獨立懸架減振機構動力學分析
1.1 全地形移動機器人結構介紹
針對全地形移動機器人獨立懸架減振機構進行動力學分析,確定影響懸架減振機構減振效果的主要因素,所研究的全地形移動機器人的三維結構圖如圖1所示。該機器人采用獨立懸架減振結構進行減振,該減振具有良好的可調節性,其調節機構的三維俯視圖如圖2所示。該調解機構的工作原理為減振器一端與減振器安裝浮動支座通過銷釘連接,減振器另一端與車身橫架相連,通過調節減振器浮動支座位置,調節減振器預緊力以及減振器與車身橫架之間的夾角。在車輪安裝架上開兩個與其邊緣平行且垂直的鍵槽,由圖2可知,減振器安裝浮動支座通過螺栓在車輪安裝架鍵槽處相連,通過鍵槽約束減振器安裝浮動支座上下以及前后位置。減振器固定支座通過螺釘與車輪安裝架固定連接,減振器浮動支座與減振器固定支座之間通過調整螺桿配合固定,約束減振器浮動支座左右位移。通過調節螺桿來使減振器浮動支座左右滑動,起到調節作用。該調節系統具有結構簡單、安裝方便以及調節省力的優點。通過該調節系統使整個減振系統具有良好的可調節性,提高了機器人的減振性能,路面適應性大大增加。
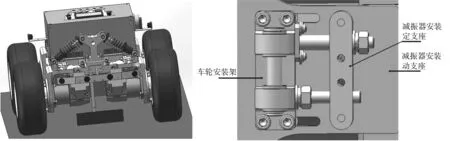
圖1 全地形移動機器人結構三維圖 圖2 調節機構三維俯視圖
1.2 四分之一懸架減振系統動力學分析
由于移動機器人車身采用對稱結構設計,因此只需研究四分之一移動機器人車身獨立懸架減振系統的動力學特性。通過對四分之一移動機器人車身懸架減振系統進行動力學特性研究,推導出其他相同減振機構的動力學特性,簡化重復建模過程,提高了研究效率[6]。
通過對減振系統進行簡化,繪制力學簡圖,然后對移動機器人懸架機構進行動力學分析。研究采用拉格朗日方程法建立移動機器人懸架系統動力學方程。四分之一獨立懸架減振機構力學簡圖如圖3所示。其中,移動機器人車輪簡化為剛度為k1的彈簧;F為地面對車身輪胎的沖擊力;k2、C分別為減振器的剛度和阻尼系數;β為減振器與車身定支座的夾角;m1為車輪以及動支座總質量;m2為四分之一車身質量。
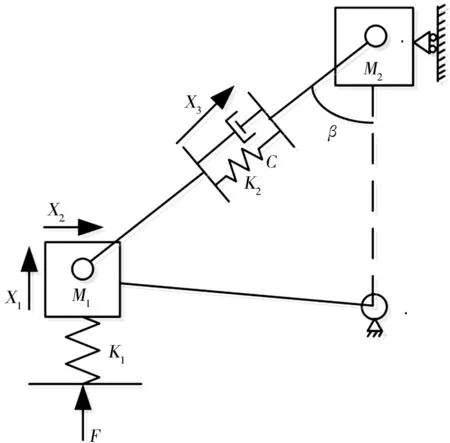
圖3 四分之一懸架減振系統力學簡圖
根據拉格朗日方程法建立四分之一獨立懸架減振機構的動力學方程,則建立系統廣義坐標為:
(1)
系統的總動能為:
(2)
根據虛功原理可得:
lW=Flx1+[k1x1-(k2x3-cx3)cosβ]lx1+(k2x3-cx3)sinβlx2+(k2x3-cx3)cosβlx3-
m1glx1-m2glx3cosβ,
(3)
系統的廣義力為Q,則有:
(4)
(5)
(6)
則可得Q的表達式為:
Q=Cq+Kq+FN,
(7)
(8)
(9)
將式(7)、式(8)、式(9)代入拉格朗日方程中,可得四分之一獨立懸架減振機構的動力學方程:
Mq-Cq-Kq-FD=0,
(10)
利用MATLAB軟件可以計算出當受到地面沖擊時彈簧長度變化情況,由于正弦力比較有代表性,因此結果是在車身受正弦力影響下繪制而成,其正弦力為:
F=100sin(1.5t+30),
(11)
根據彈簧剛度的不同,分別繪制彈簧長度變化量曲線。彈簧剛度為70 N/mm,地面輸入信號為正弦信號且作用時間1 s時的彈簧長度變化量如圖4所示。彈簧剛度為100 N/mm,其他參數與圖4參數相同的彈簧長度變化量如圖5所示。通過對比圖4、圖5發現,在相同地面信號輸入時,彈簧剛度越大其峰值越小,當地面輸入信號消失時,彈簧長度變化量開始變小;彈簧剛度100 N/mm比70 N/mm時的彈簧長度變化量小,即在相同力的作用下,彈簧剛度越大其變形量越小。

圖4 彈簧剛度為70 N/mm時彈簧長度變化量圖 圖5 彈簧剛度為100 N/mm時彈簧長度變化量圖
2 仿真實驗分析
利用Adams(Automatic Dynamic Analysis of Mechanical System)軟件分析全地形移動機器人獨立懸架減振機構動力學特性,配置出合適的減振器參數范圍。由于地形不同,車身受地面激勵力類型也不同,因此應討論不同地面激勵力對移動機器人減振效果的影響情況[7]。主要討論的典型激勵力有三種情形:第一種是單位階躍信號力,此種力相當于機器人上下臺階時的受力情況;第二種是斜坡信號力,此種力相當于車輪連續上臺階或下臺階情形;第三種是正弦信號力,此種力相當于移動機器人在坑洼路面運行時的車身受力狀態,分別對機器人進行仿真分析,確定出合理的減振器參數范圍[8]。
2.1 車身受單位階躍信號力作用
通過Adams設置一個垂直于輪胎的單向力,單位階躍信號力設置方法如圖6所示。通過step函數進行設置,作用時間為0到1 s內,作用力從300 N變到0 N,模仿上臺階與下臺階時車身受力情形[9]。通過設置不同的彈簧剛度系數進行仿真實驗。現設置彈簧剛度的取值范圍為70 N/mm左右,取七組彈簧剛度值分別進行仿真,彈簧剛度系數分別為40 N/mm、50 N/mm、60 N/mm、70 N/mm、80 N/mm、90 N/mm、100 N/mm,其中阻尼系數取0.7 Ns/m。測定輪胎離地高度變化圖,彈簧長度變化量圖以及車身定支座的縱向位移變化圖,通過對比分析,確定彈簧剛度值取值范圍。其中彈簧阻尼器在Adams的設置如圖7所示。通過改變彈簧剛度系數值,分別進行仿真實驗,測得實驗數據如圖8、圖9、圖10所示。
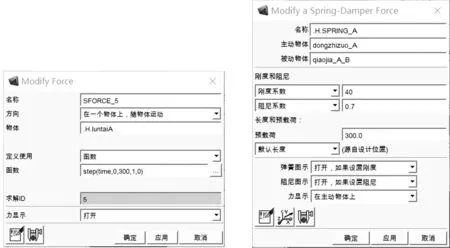
圖6 單位階躍信號力設置 圖7 彈簧阻尼器參數圖
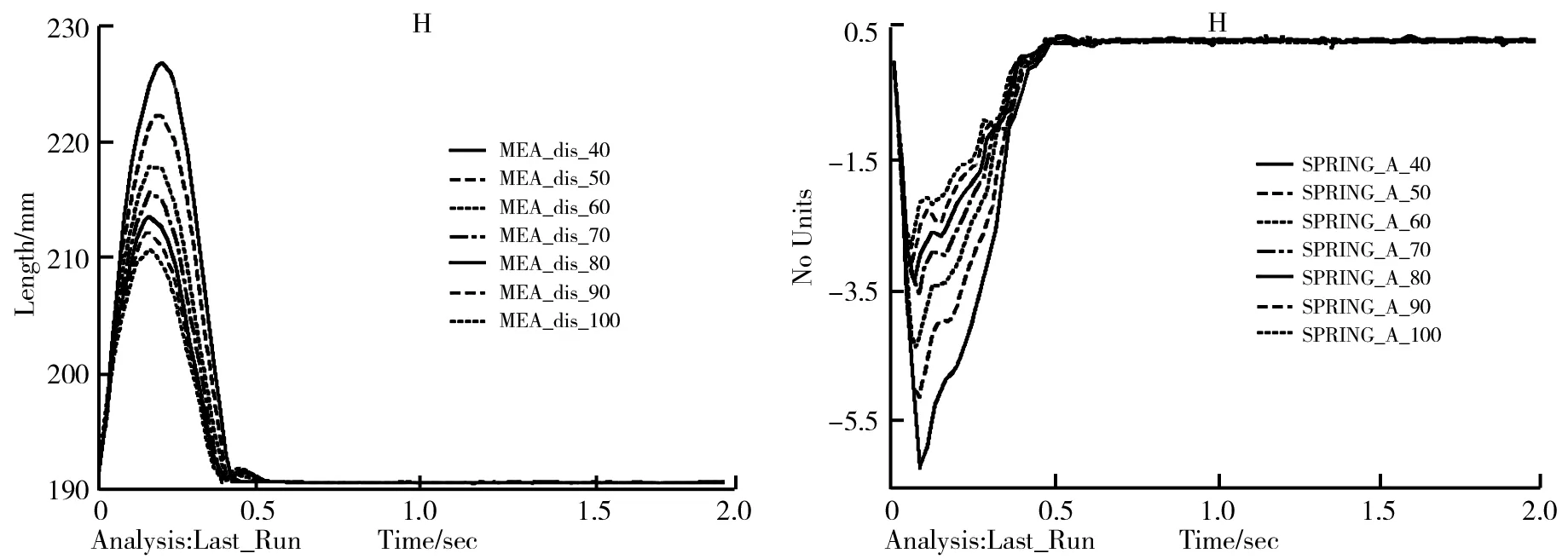
圖8 受單位階躍信號力時車輪縱向位移變化圖圖9 受單位階躍信號力時減振器彈簧長度變化量
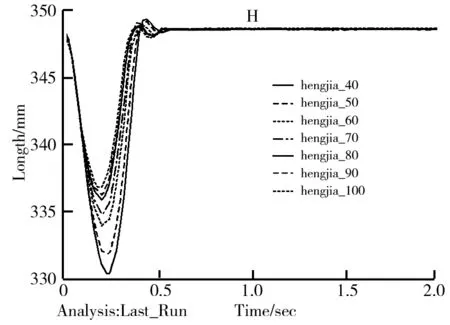
圖10 受單位階躍信號力時車身橫架縱向位移圖
通過分析圖8、圖9、圖10,整理仿真結果如表1所示。通過表1數據可以發現,當彈簧剛度不斷增加時,車輪縱向跳動,彈簧長度變化量以及車輪橫架縱向位移均減小,符合前面理論分析計算的結果。對比表上數據發現車輪縱向位移變化量的值遠遠大于車輪橫架縱向位移,而車輪橫架縱向位移與車輪縱向位移間差值越大,說明該減振機構的減振效果越好。通過觀察表1差值變化情況可知,當彈簧剛度大于70 N/mm時,其前后差值變化量很小,說明當彈簧剛度系數大于70 N/mm時,繼續增大彈簧剛度對減振效果的改善不大。因此通過上述分析可知,使用該減振機構的全地形移動機器人具有良好的減振效果,并且彈簧剛度越大其減振效果越好,但當彈簧剛度大于70 N/mm時,增大彈簧剛度其減振效果的改善情況變小,因此彈簧剛度系數范圍應大于或等于70 N/mm。
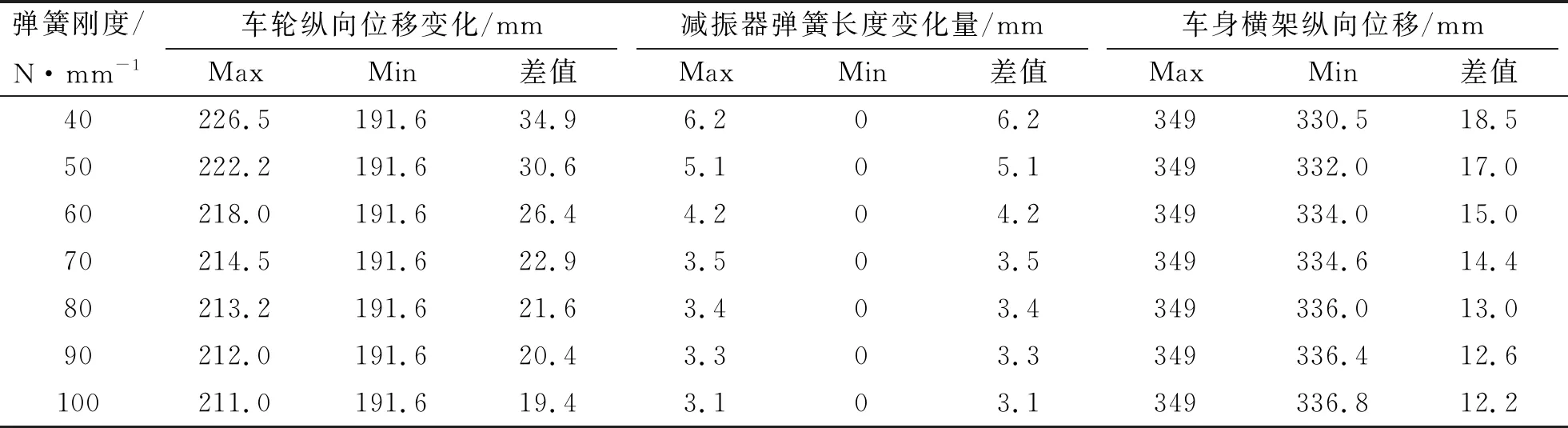
表1 不同剛度彈簧單位階躍激勵響應
2.2 車身受斜坡信號力作用
通過Adams軟件設置機器人受地面作用力為斜坡力,地面對輪胎作用力為斜坡力的設置方法如圖11所示。該力在仿真過程中的變化情況如圖12所示。
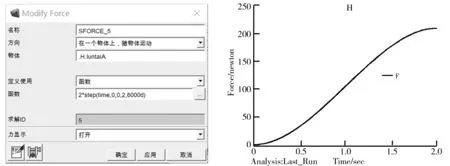
圖11 斜坡信號力設置 圖12 斜坡力變化情況
仿真分析機器人受斜坡力時的動力學特性,其仿真條件設置與受單位階躍信號力仿真相同。通過仿真分析驗證該減振機構在受斜坡力時的減振效果來配置合適的減振器參數,其仿真結果如圖13、圖14、圖15所示。
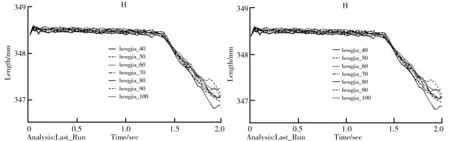
圖13 受斜坡力時車身橫架縱向位移圖 圖14 受斜坡力時車輪縱向位移變化圖
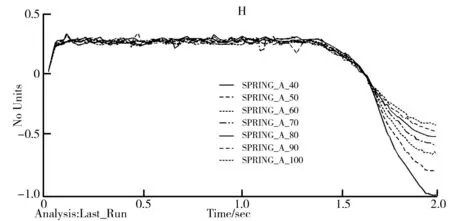
圖15 受斜坡力時減振器彈簧長度變化量
通過分析上述仿真結果的變化情況,得到實驗數據如表2所示。通過分析表2仿真數據發現,當減振器彈簧剛度不斷增加時,懸架減振系統的減振效果越來越好;同時還可以發現,當車身受地面沖擊力增加時,車身的振動變得更加劇烈,因此可知,使用該獨立懸架減振機構的移動機器人,其機器人在一定地面沖擊范圍內具有良好的減振效果,因此該移動機器人具有狹義的全地形適用性。
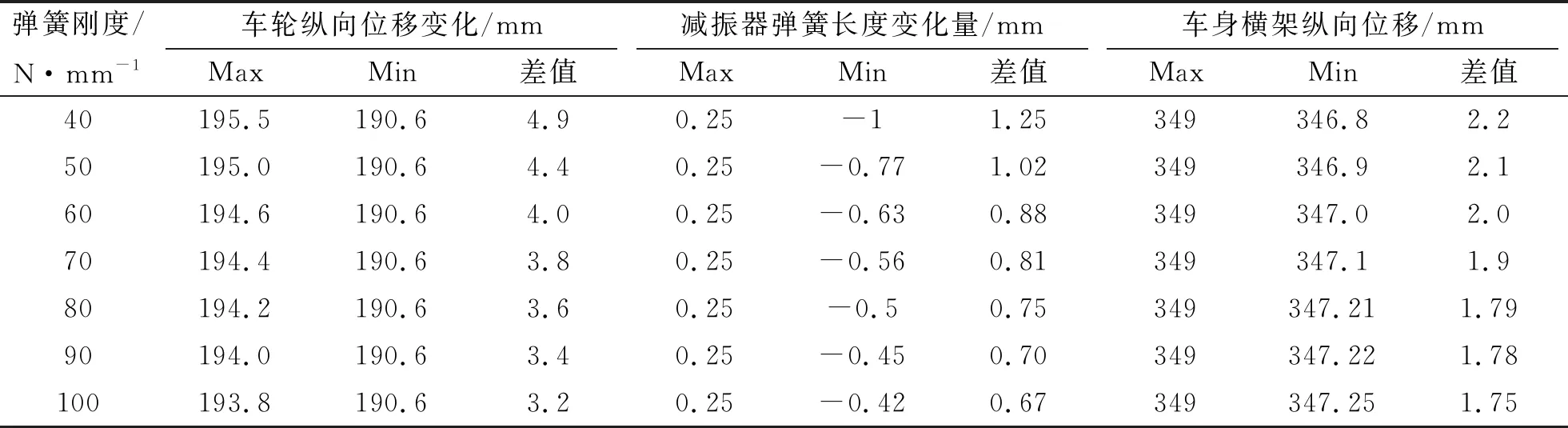
表2 不同剛度彈簧斜坡激勵響應
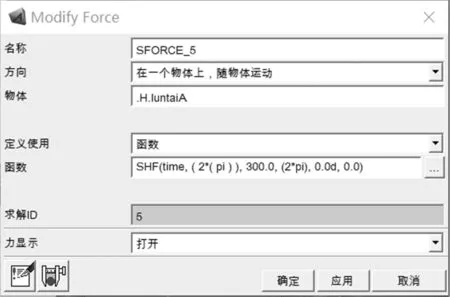
圖16 正弦力設置
2.3 機器人受正弦波信號力作用
由于移動機器人在過階梯型路段時,不管是在上臺階還是下臺階時,其受力方向均為垂直輪胎向上,因此為了更好地模擬實際運行情況,現對機器人所受的正弦力取絕對值,其具體設置如圖16所示。通過SHF函數設置正弦力,其正弦力在仿真時的變化情形如圖17所示。除了改變車身所受的地面沖擊力,其他仿真條件與車身受斜坡力時的仿真條件相同,完成對全地形移動機器人懸架減振機構仿真實驗,其仿真結果如圖18、圖19、圖20所示。
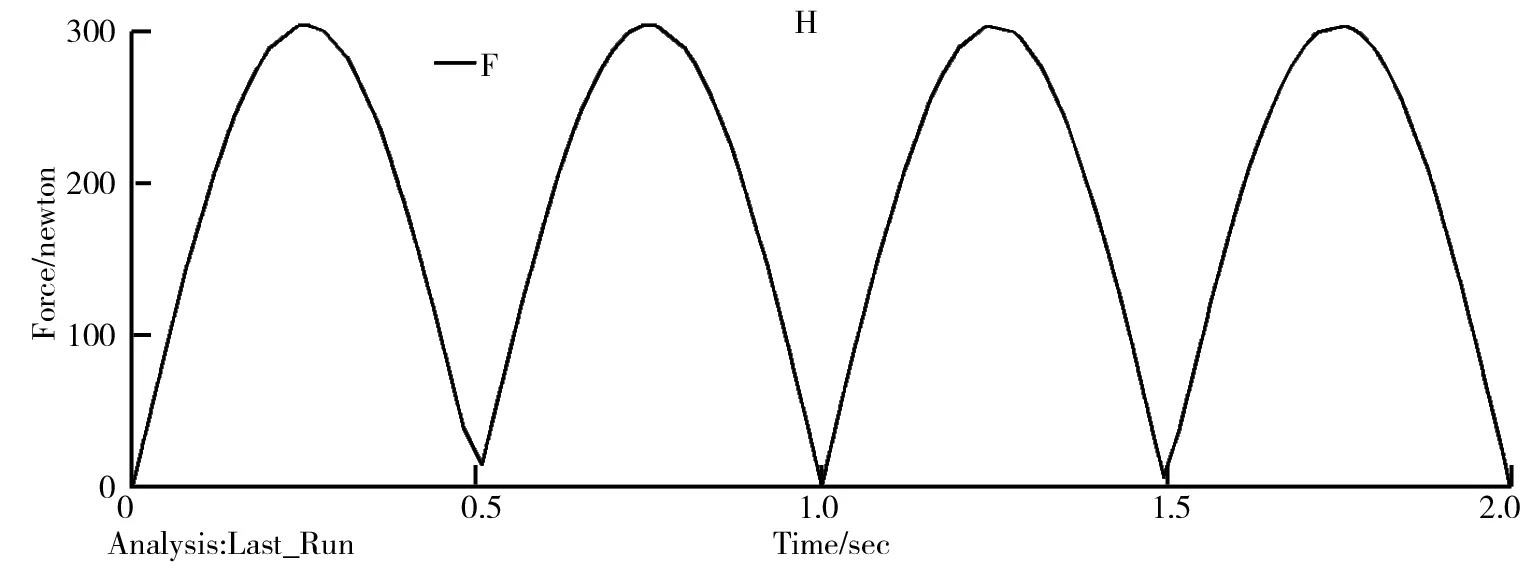
圖17 正弦力變化情形圖
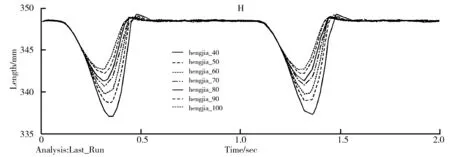
圖18 受正弦力時車身橫架縱向位移圖

圖19 受正弦力時減振器彈簧長度變化量
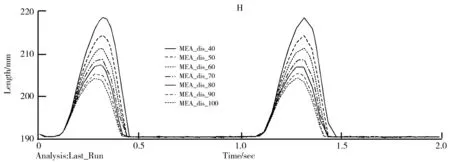
圖20 受正弦力時車輪縱向位移變化圖
通過對仿真結果進行分析可得,當機器人受地面沖擊力為正弦力時,其仿真結果與受單位階躍信號力的仿真結果相似,其區別在于當系統為正弦力輸入時,減振系統的減振數據呈周期性變化。因此可知該機器人懸架減振機構具有良好的減振效果,其彈簧剛度系數應大于 70N/mm。
通過以上三組仿真實驗分析可知,當彈簧剛度不斷增加時,系統的減振效果逐漸變好,但當彈簧剛度系數大于或等于70 N/mm時,繼續增大彈簧剛度系數時,機器人懸架減振機構的減振增強效果逐漸下降。因此通過以上分析現初步確定減振器彈簧剛度系數的取值范圍為70 N/mm到90 N/mm之間。
3 結論
研究全地形移動機器人獨立懸架減振機構的動態特性,利用拉格朗日方程法完成了四分之一懸架系統的動力學建模,確定了彈簧剛度與懸架減振系統的減振效果之間的變化規律;通過Adams機械系統動力學分析軟件完成獨立懸架減振機構的動力學仿真實驗,機器人獨立懸架減振機構減振器彈簧剛度的取值范圍應在70 N/mm到90 N/mm之間,此時移動機器人懸架減振系統具有良好的減振效果,滿足移動機器人平穩運行的設計目標。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19