地鐵車輛全自動駕駛系統發展分析
2019-12-25 09:23:24
福建質量管理 2019年23期
(山東職業學院 山東 濟南 250104)
一、引言
我國地鐵建設進入高速爆發階段,各城市新建地鐵線路逐步投入使用,隨著信號系統技術的發展,地鐵駕駛自動化程度不斷提高,全國多條全自動駕駛線路將陸續開通,例如:上海地鐵14號線、15號線和18號線;青島地鐵8號線;北京地鐵燕房線;成都地鐵9號線等[1-2]。
二、地鐵全自動駕駛發展
我國地鐵駕駛模式主要分為了三個階段:
(一)完全手動駕駛模式
地鐵發展初期,信號系統發展不完備,地鐵的駕駛主要依靠駕駛員依據信號系統進行完全手動駕駛。
(二)手動駕駛的自動化運行模式
隨著地鐵信號系統的發展,使地鐵車輛聯合信號設備進行實時通訊,地鐵車輛得以在人工監控下實現行駛過程和進站對標停車的自動化運行,但是開關車門操作和列車啟動操作還是需要司機進行控制。
(三)全自動駕駛模式
計算機技術和網絡技術的飛速發展,地鐵駕駛運行模式也迎來了革命性的變革,無人干預且自動運行的全新地鐵信號和車輛系統已經在地鐵行業進行運用,其主要的優勢在于地鐵列車在運行過程中的各個環節均實現自動化運行,無需人工干預。
(四)全自動駕駛等級分類
依據國際公共交通協會(UITP)將列車運行的自動化水平(自動化等級,簡稱GoA)劃分為5個等級:
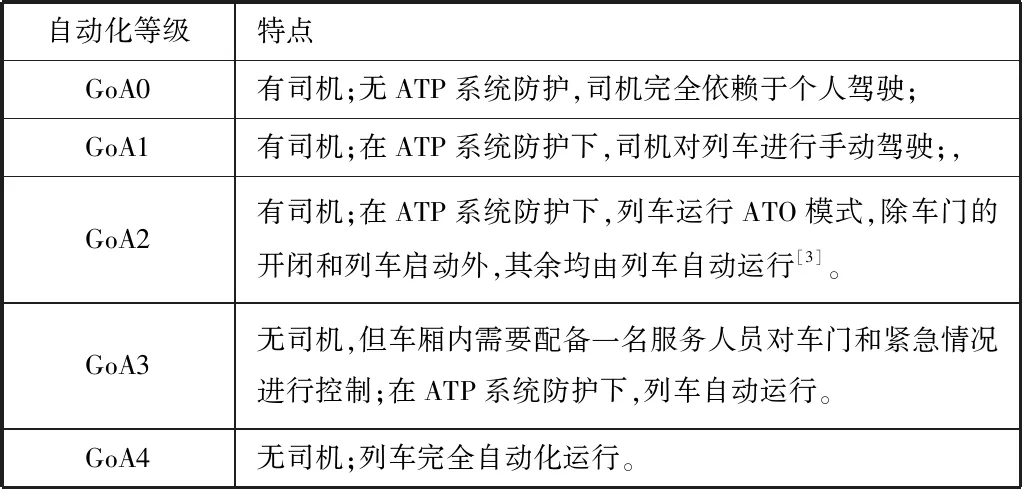
表1 UITP列車自動化水平等級分類表
三、地鐵全自動駕駛系統與傳統駕駛控制系統差別
地鐵全自動駕駛系統相較于傳統的駕駛控制系統的最主要區別在于運營管理方式和系統構成不同。
(一)運營管理方式的差異
地鐵全自動駕駛系統的運行監控模式完全基于OCC(地鐵運行控制中心)統一控制,地鐵車站沒有控制車輛運行的權限;乘客的乘降和組織完全依賴控制中心;車輛的行車組織完全基于計算機程序進行的最優化計算,運行的原則完全基于“故障-安全模式”,發生緊急狀況才能進行人工介入,使系統降級運行。為了保證乘客的安全及列車的穩定運行,控制中心需要設置備用設備,一旦發生故障,備用設備要立即投入使用,以提高控制中心運行的穩定性[5]。
(二)地鐵全自動駕駛系統組成
全自動駕駛系統的的基本組成主要有以下部分:
1.全自動運行系統的車輛系統
全自動運行的地鐵車輛內沒有司機值乘,但駕駛室內依然需要設置簡易駕駛臺,一旦車輛發生緊急故障,需要客室內工作人員進入駕駛室緊急接管列車;同時,車輛內系統采用冗余設計,提高設備運行穩定性;駕駛室內設置相應傳感器(例如:攝像頭和煙霧傳感器等),實時將車輛信息傳輸到控制中心,同時接收到控制中心傳來的列車運行指令。
2.全自動運行系統的信號系統
全自動駕駛系統的安全運營對于信號系統提出了更高的要求,因此,信號系統的設計需要更高的可靠性、安全性、冗余性、高定位精度和大傳輸帶寬,同時運行模式需要采用移動閉塞方式。
3.地鐵運行控制中心(OCC)
全自動運行的駕駛模式對于控制中心提出了更高的要求,控制中心采用一級完全控制模式,地鐵的行車控制,車站設備控制、電力調度控制和防災控制均在控制中心內進行,其功能已經遠遠超過傳統地鐵OCC的功能[4]。
四、結論
本文主要主要介紹了我國及國際上全自動駕駛系統的主要類別,并對地鐵全自動駕駛系統和傳統的駕駛系統進行對比,得出全自動駕駛系統相較于傳統駕駛系統其系統組成更為復雜,信息化程度和集成度更高,但其安全性、穩定性及冗余性完全滿足運營需要。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
