無人駕駛背景下降雨對城市交通信號控制的影響研究
2020-04-29 10:55:16安喜才梁士棟陳玉蓉
智能計算機與應用 2020年2期
安喜才, 嚴 凌, 梁士棟, 陳玉蓉
(上海理工大學 管理學院, 上海 200093)
0 引 言
隨著經濟全球化與科技的發展,汽車行業進入了一個新的發展時期。2013年以來,國際知名汽車企業之間開啟了一場無人駕駛汽車的研發競賽,一些企業研發的無人駕駛汽車相繼亮相,并宣稱10~15年實現量產[1]。無疑無人駕駛汽車是汽車行業發展的不可阻擋的趨勢,隨著科技的不斷進步將實現V2X。新的技術只能增加交通的安全性與便捷性,卻并不意味著“無人駕駛汽車+車聯網”就可以解決現存的所有的交通問題。汽車科技的進步以及城市的快速發展對道路運行提出了更高的要求,雨雪等不利天氣會使交通運行環境產生巨大變化[2-4],即使得對交通影響的相關研究顯得尤為重要[2]。無人駕駛車輛會根據不同降雨強度對應的路面摩擦系數按照符合人類駕駛時降雨-速度反應模型自動調節車速,當信號控制不能同時響應交通環境的變化時就會造成交通供需的失衡,造成延誤、排隊、綠燈空放等。傳統的定時式信號配時方案便會造成這種情況。故無人駕駛情況下降雨時的交通信號控制優化具有重要的意義。
目前對高速公路雨天控制管理情況的研究比較多,主要集中在定量分析雨雪天氣對交通流參數的影響方面,提出了可變限速等對策[5]。對城市內部交通的控制管理研究的也有不少[6-7],已有不少學者就降雨等惡劣天氣對交通流特性的影響進行了研究,并取得了不錯的成果。在降雨對速度以及通行能力的影響方面,龔大鵬等人[6]通過研究發現,在夜間降雨強度達到中雨及以上時,快速路、主干路、次支路的速度下降百分比分別為:8.8%、4.8%、5.9%,并得出夜間、高峰和平峰時降雨強度與行程速度下降之間的關系。林志恒等人[7]應用多層線性模型(HLM),研究了降雨強度對城市道路交通流平均行駛車速的影響。曾偉良等人用Spearman相關系數和Pearson相關系數描述了降雨量和速度變化的關系,認為降雨造成部分路段車速降低,降雨量與速度變化量之間的相關性不明顯。Lam等人[8]通過研究降雨強度對交通流的影響,提出并標定了基于降雨強度的速度—流量和速度—密度關系模型。李巖等人[9]通過引入降雨修正系數,建立了單點交叉口交通信號配時方法,用改進的定時控制方案效果較好,車均延誤比原方案降低13%~25%,并可在臨近飽和與過飽和狀態時推遲鎖死狀態的產生,車均延誤最低。
綜上所述,多數學者都是從有人駕駛的角度去研究交叉口信號控制的,但是無人駕駛背景下降雨對城市道路交通信號控制的影響卻還有一些新內容亟待深入探究。本文通過分析降雨對路面摩擦系數、車速、車頭間距等的影響,對于無人駕駛汽車的運行環境要素指標進行了運算得出修正系數。通過流密速之間的關系推出降雨對交叉口信號控制的影響關系。對此進行分析研究的路線如圖1所示。

圖1 研究路線
1 降雨對城市道路行車環境的影響
降雨對城市道路交通流所產生的影響主要表現在3個方面[10],對此可表述為:
(1)改變了駕駛員的駕駛行為,降雨天氣使駕駛員視野視線變差,使駕駛員的行為變得謹慎,從而改變了車輛的跟馳行為。
(2)對交通流運行的通行能力和出行效率造成了不好的影響。
(3)降低了交通運行的安全性,降雨在地面形成一層水膜使地面摩擦系數降低[10],如果不減速會出現制動距離增加,可能會出現交通事故[11]。
有研究認為降雨天氣引發的交通事故是一般天氣的2~3倍,尤其是降雨發生在一段干燥天氣后危險性更大[3]。對于無人駕駛汽車同樣存在著上述問題。無人駕駛車輛自動實時檢測降雨量,從而自動匹配相對應的速度。同時,如果視距不夠,而車速過快,則可能引發交通事故。
1.1 降雨強度的等級標準
通常情況下交通量都是以小時為單位進行計量的,如果降雨強度比較大,同時把降雨量也按照小時進行計量的話,交通信號控制的變化勢必會發生遲滯,所以本文計量雨量取半個小時為計量單位,直接取平均值進行計算,即檢測半個小時的降雨量乘以2作為小時降雨量,可得表1。當降雨持續半個小時,交通控制信號就可以對降雨及時做出響應。
表1 降雨量等級劃分標準
Tab. 1 Criteria for grading rainfall mm
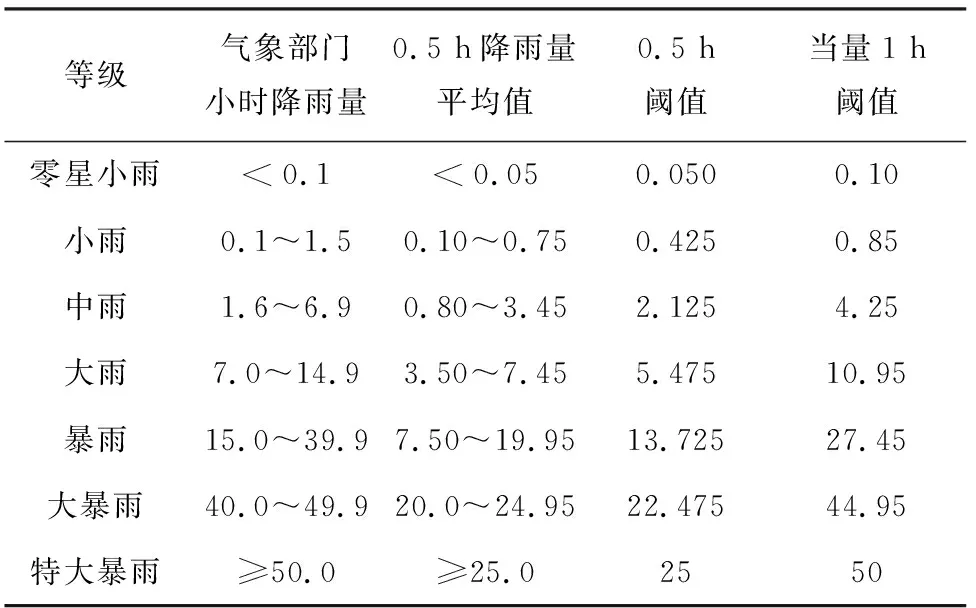
等級氣象部門小時降雨量0.5 h降雨量平均值0.5 h閾值當量1 h閾值零星小雨<0.1<0.050.0500.10小雨0.1~1.50.10~0.750.4250.85中雨1.6~6.90.80~3.452.1254.25大雨7.0~14.93.50~7.455.47510.95暴雨15.0~39.97.50~19.9513.72527.45大暴雨40.0~49.920.0~24.9522.47544.95特大暴雨≥50.0≥25.02550
1.2 降雨對無人駕駛車輛視覺感知的影響
當有人在駕駛車輛時,80% 的環境信息來自于駕駛者的視覺感知。目前無人駕駛車輛感知周圍的環境的方法有超聲波傳感器、紅外線傳感器、激光雷達、毫米波雷達、微波雷達、立體視覺攝像機等。無人駕駛汽車行駛通常需要對行駛環境進行檢測,提取路面信息,檢測障礙物,并計算障礙物相對于車輛的位置[12]。其中,主動傳感系統,如激光雷達或毫米波雷達在駕駛環境障礙物檢測中顯示了一些良好的性能。激光雷達通過發射激光束并計算發送和接收的時間差來測距,提供了高精度的測量結果,但對惡劣天氣,如雨、霧、雪等較為敏感。毫米波雷達通過檢測反射波來測距,即使在惡劣天氣也能提供足夠的精度;但也有缺點,通常來說毫米波雷達視場較小,側向精度相對較低[1]。與雷達相比,視覺系統視場寬,側向精度高,成本低,而且還是被動傳感器,相對來說,不受其他傳感器影響,能夠提供亮度和深度信息,因此可用于距離和速度檢測。
雖然降雨對視頻識別也有一定的影響,但是可以通過視頻降噪等處理來提高視頻的清晰度。然而視頻識別也有缺點,比如單目測距精度不夠,當測量距離達到100 m時甚至可產生10%的誤差[13]。雙目測距目前技術并不完善。但是總體來說,基于視覺的高效、低成本的環境感知將成為無人駕駛汽車未來產業化的主要方向。
1.3 降雨對車速的影響
公路通行能力手冊(HCM2000)中提到,當不存在可見度問題時,潮濕的路面對速度沒有特別的影響。這表明小雨對速度沒有多大的影響,除了下雨持續時間太長以致路面上有大量積水的情況。另一方面,大雨將直接作用于可見度,同時高速公路交通研究已經證實:大雨對交通流有著明顯的影響。
下小雨,觀測到自由流速度降低2.0 km/h。在流率為2 400輛/h,晴朗的天氣時,運營速度為89~95 km/h,而在下小雨時,運營速度減小到大約82 km/h。在小雨的天氣條件下,對交通流或通行能力的影響很小。
在大雨天氣下,自由流速度下降5.0~7.0 km/h。結果顯示,流率在2 400輛/h 的情況下,晴朗的天氣下,速度分別為 89 km/h和95 km/h 的交通,受大雨的影響,速度由89 km/h和 95 km/h降低到76 km/h和79 km/h,可以看出分別降低13 km/h和16 km/h。此外最大流率也受大雨的影響,相對晴朗天氣條件下的觀測值來說,大雨天氣使最大流率降低14%~15%。
本文以Ibrahim等人[14]得到的結論數據進行擬合,用速度下降百分比表示速度修正因子Fs,擬合降雨強度—速度修正因子曲線得到線性回歸方程為:
Fs=0.006 7X+0.073,
(1)
根據式(1)可以推出速度與修正參數之間的關系為:
Vy=V(1-Fs).
(2)
其中,Vy為降雨天預測速度;V為正常天氣時速度;X為降雨強度;Fs為不同條件下速度修正因子。
由于這是駕駛員駕駛車輛時的速度變化模型,比較符合人類在降雨時行車的自身感受習慣,故從乘客的感受以及安全角度來考慮[15],本文以此作為無人駕駛汽車在降雨時的速度修正系數。城市道路車輛行駛速度較低,利用上述公式(1)~(2)對10~60 km/h范圍的車速在Matlab上進行計算,可得不同降雨量與速度之間的變化關系。
1.4 降雨對摩擦系數的影響
東南大學季天劍根據中國路面結構情況(分析的對象是高速轎車子午線輪胎模型, 規格為225/50R16 92V),利用回歸分析得到降雨強度與水膜厚度的回歸方程[11, 16]:
h=0.128 5×l0.617 5×i-0.314 7×q0.778 6×TD0.726 1(R2=
0.93),
(3)
其中,h為水膜厚度(mm);l為坡長(m),本文中城市道路視為平坦路面,無坡度;i為坡度(%);q為降雨強度(mm/min);TD為構造深度, 道路表面的構造深度,本文取0.8 mm。
現對坡度為0.03 , 坡長(排水長度)為15 m情況下的降雨強度對水膜厚度的影響進行計算分析。
回歸分析得到附著系數與水膜厚度和速度的經驗關系式為[16]:
f=0.945 8-0.005 7V-0.011 8h(R2=0.93).
(4)
其中,f為不完全滑水時附著系數;V為行車速度(km/h);h為水膜厚度。
隨著降雨強度的增大,輪胎與地面的摩擦系數呈現總體下降趨勢,不同的降雨強度對應不同的摩擦系數,在10~60 km/h的車速范圍內由式(2)計算得出不同降雨強度與路面水膜厚度之間的數據關系變化趨勢如圖2所示。
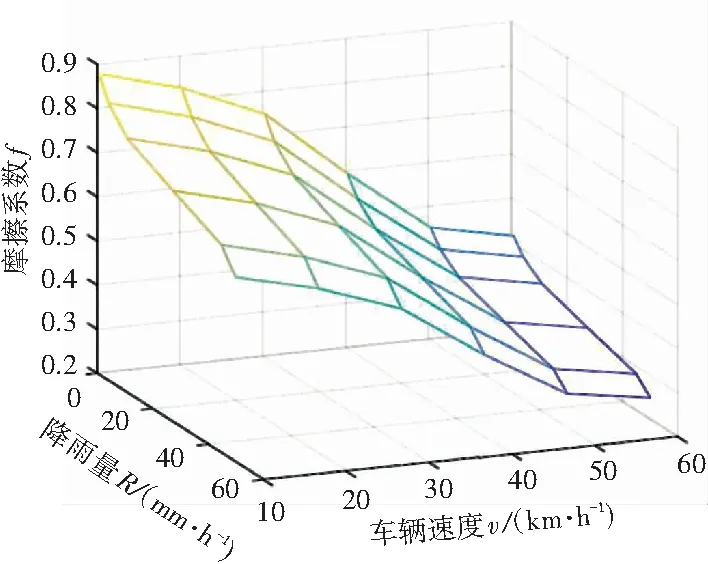
圖2 摩擦系數隨降雨強度和車速的變化圖
Fig. 2 Diagram of friction coefficient that changes with rainfall intensity and vehicle speed
2 降雨對交通流量的影響
2.1 降雨條件下車頭間距的變化
當汽車剎車輪胎抱死時,汽車剎車距離與質量無關。從能量守恒可以得到摩擦力對物體做的功等于物體動能的變化量,即:
(5)
其中,N為車對地面的壓力,等于車的重力N=F=mg(由于城市車輛速度較慢,故水膜對車輛向上的作用力忽略不計);f為車輪與地面的摩擦系數;S為制動距離;M為車的質量;v為車速。

(6)
車頭間距變化百分比為:
(7)
根據前文公式可以推出車頭間距與修正參數之間的關系為:
hdy=hd(1+Hj).
(8)
其中,hdi為雨天不同車速下的車頭間距;hd為晴天車頭間距;hdy是修正后的車頭間距;Hj為車頭間距與修正參數;其余符號意義同上。
2.2 降雨條件下的交通流模型

(9)
雨天車速降低為v=βvi,車頭間距變為hd=αhdi。設雨天能通行的交通量為Q*i,則有:
(10)

(11)
其中,Q*i為雨天交通流量;γ為交通流量變化率;S為飽和交通流率。
2.3 降雨對信號控制周期的影響
(12)
其中,L為每周期總損失時間,Y為關鍵相位流量比。
由公式推導可知降雨會導致通行能力變化,進而會導致該區域的信號周期與交通需求不能相匹配。
3 典型案例分析
本文選擇一個常規兩相位交叉口(均為單車道)為例進行分析,可以從中得到降雨條件下和非降雨條件下的交通變化模型。以晴天的數據為基準,計算得到交叉口信號控制周期。緊接著考慮降雨條件下車速,路面摩擦系數等的變化得出雨天的信號控制模型,再利用Matlab編程運算得出數據并進行分析。
兩相位信號交叉口如圖3所示。各進口道交通流量和飽和流量見表2,綠燈間隔時間為7 s,黃燈間隔時間為3 s,啟動損失時間為3 s,交叉口設計飽和度(v/c)為0.9。其中,南北向為主干路,東西向為次干路。

表2 交叉口各進口道流量及飽和度
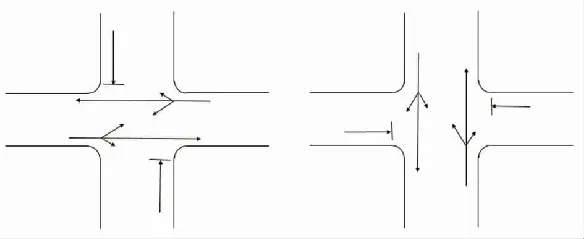
(a) 第一相位 (b) 第二相位
3.1 晴天情況下信號控制周期時長
交叉口晴天時的信號控制分析的研發步驟分述如下。
Step1各進口道流率及關鍵車道組選擇。首先對各進口道流率進行計算,即用進口道小時流量除以對應進口道飽和流量,計算結果見表3。根據計算結果及交叉口信號相位設置,選擇關鍵車道組。

表3 各進口道流率及關鍵車道組
Step2每周期總損失時間。具體公式為:
(13)
Step3周期時長計算。由韋伯斯特法得:
(14)
3.2 不同降雨強度下信號控制周期時長的變化
降雨對行車環境造成的影響程度,取決于降雨強度。無人駕駛汽車的車輛的降雨量感受器對降雨量進行實時監測,根據相關計算公式得出降雨量的大小,實時推出地面摩擦力的變化,根據安全制動距離原則調整其車速。車速、車頭間距的變化導致交通流量變化,造成交通控制信號與交通需求不匹配。
由車速修正系數β和車頭間距變化系數α可以計算得出γ的值,得出隨著降雨量的增大交通量也在發生變化,根據前文數據以及公式,通過Matlab編程運算可得不同降雨強度下對應速度的交通流量。數據變化結果見表4。不同降雨量與信號周期時長的數據關系見表5。

表4 不同雨量情況下對應的交通量流量變化表
注:表中的速度為假設的初始速度,考慮降雨量后對每個初始速度進行修正,從而得到不同速度下修正后的交通量
表5 不同降雨量與信號周期時長的關系
Tab. 5 The relationship between different rainfall and signal period length s/周期

速度(km·h-1)102030405060不同降雨量下流量(mm·h-1)0.854.2510.9527.4544.9550.0012711397745956807569585149514947434039414039363534363534333231333232313030
3.3 結果分析
為了驗證模型的效用,通過分析降雨對無人駕駛汽車的行車條件的影響,得到降雨時無人駕駛車輛情景時的交叉口信號配時優化方案。在設定速度區間10~60 km/h的背景下,速度取值間隔為10,取了6組數據,降雨強度分別從小雨到暴雨,也分了6組數據,分別對下面6組數據進行分析。將數據代入公式進行計算。
當降雨強度相同時,隨著假設的初始速度的增大,交通量逐漸縮減,最大縮減量高達73%左右;當假設的初始速度相同時,隨著降雨強度的增大,交通量也是逐漸縮減的,但是縮減的規模遠不如速度是變化量時的情形,縮減量只有31%左右。可見交通流的初始行駛速度變化對交通流量的影響很大,速度是交通控制需要考查的主要因素。同時降雨對交通量的影響也是不容忽視的。
信號周期時長的總體變化趨勢是下降的,各種降雨條件下的信號周期如圖4所示。

圖4 信號周期隨降雨強度與車速的變化關系圖
Fig. 4 Relationship diagram of signal period with rainfall intensity and vehicle speed
4 結束語
本文考慮無人駕駛車輛場景,通過分析降雨對無人駕駛車輛的車速以及道路地面摩擦力的影響,無人駕駛車輛會實時根據雨量進行車速調整,得到不同的降雨強度對交通影響程度的數值。根據HCM2000中的數據,在不同雨強下速度降低的平均值,通過擬合降雨天氣下速度修正趨勢線,構建速度修正模型,為速度預測提供修正參考。同時再查閱相關文獻求得降雨對車輪和地面之間的摩擦系數的關系式,進而分析得出降雨對無人駕駛環境下的交通控制會造成的影響。
本文得到的結論如下:在10~60 km/h的速度范圍內,隨著降雨強度的變化導致輪胎路面摩擦系數在0.25~0.88范圍內變化,車頭間距在11.91~270.55 m之間變化,通行能力的變化率在0.19~1.07之間。當降雨強度相同時,隨著速度的增大,摩擦系數減小比較緩慢;當速度相同時,隨著降雨強度的增大,摩擦系數急劇減小;說明影響車輪與地面摩擦系數的主要原因是降雨強度。由此證明隨著降雨強度的變大,信號控制周期時長變短。
當降雨量是交通環境的變化量時,由于地面摩擦系數的降低,無人駕駛車輛的通過的流量減少,導致交通量的減少達到30%。車流量的減少隨即帶來信號控制周期時長的變化,進而產生降雨對城市主干道綠波控制的影響,當交叉口的周期時長與交通需求不匹配時,產生更大的延誤甚至會造成二次停車,從而使干線綠波失效。因此,需要信號控制與無人駕駛車輛一樣對降雨強度做出同步的反應,如此才能使信號周期與車輛同行流量相匹配。另一條路徑是隨著科技的進步構建車聯網,實現v2x。本次研究的不足之處在于不同降雨強度下對車速的折減函數、車輪與路面之間的摩擦系數函數仍有待后續研究優化,無人駕駛車輛的跟馳距離也需做更深入的探討研究。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
鴨綠江(2021年35期)2021-04-19 12:24:18
當代陜西(2021年2期)2021-03-29 07:41:24
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00