雙揚聲器近場聲源重放實驗研究*
2020-06-08 02:29:18吳彥琴桑晉秋鄭成詩李曉東
應用聲學 2020年2期
魏 彤 吳彥琴 桑晉秋 鄭成詩 李曉東
(1 中國科學院聲學研究所 北京 100190)
(2 中國科學院大學 北京 100049)
0 引言
多通道揚聲器聲重放技術通過適當設計揚聲器布置和信號饋給而在一定的區域內產生期望的聽覺感知,以滿足聽音者臨場感聽音需求。該技術主要包括基于人耳感知特性的虛擬聲場重建和基于聲場合成特性的物理聲場重建,目前已廣泛應用于電影院、音樂廳和會議室等諸多場合,其中有代表性的矩陣環繞聲技術包括5.1、7.1、9.1、22.2 通路系統等。分析表明,目前多通道揚聲器聲重放技術主要側重于聲音的方向感、包圍感、音色等,對于聲音的距離感仍缺乏研究。
現有少量研究通過數量龐大的揚聲器實現對近場聲源的物理聲場重建。Spors 等[1]采用頻譜相除法(Spectral division method,SDM)利用直線形揚聲器陣列重放近場聲源,但是該方法無法合成全方位角的近場聲源。隨后,基于基爾霍夫-亥姆霍茲方程的波場合成(Wave field synthesis,WFS)技術和基于球諧函數的近場補償的HOA(Near-field compensated higher order ambisonics,NFC-HOA)
技術采用圓形揚聲器陣列來合成全方位角的近場聲源。然而,此類方法要求揚聲器數量龐大,成本高,復雜度高,且要求放音房間的混響時間短,在實際放音環境下難以達到理想的效果。
如何利用較少數量的揚聲器實現近場聲源重放,可基于人耳感知特性來實現。心理聲學研究結果表明,對于較遠距離的聲源(距離受試者超過1 m),受試者對距離感知主要依靠單耳因素,包括幅度、直達混響能量比及一些角度因素和譜因素[2];對于較近距離的聲源(距離受試者小于等于1 m),受試者的軀干、肩、頭等身體結構對波陣面產生嚴重的影響,在偏離中垂面的方向,會引起低頻段很高的雙耳聲級差(Interaural level differences,ILDs)[3],并且為受試者提供了近場聲源距離感知的因素[4]。而頭相關傳遞函數(Head related transfer function,HRTF)能夠較完整反映上述的單耳因素和雙耳因素。基于HRTF的雙耳聲重放技術可通過HRTF 數據庫合成雙耳信號,在雙耳處實現聲壓信號重建[5-7]。早期HRTF的測量主要基于遠場條件下,主要包括1994年測量的MIT 庫和2000年測量的CIPIC 庫[8-9]。針對HRTF 測量復雜和耗時的問題,董秋潔等[10]提出了一種利用雙揚聲器的HRTF 動態測量方法,但對HRTF 的近場測量數據庫較少;1998年,Duda 等[11]使用Bose Acoustimass 揚聲器聲源近似點源完成了近場HRTF 的測量,然而普通揚聲器在近場條件下無法滿足點源條件;2004年,Nishino 等[12]使用十二面體揚聲器聲源近似點源完成了近場HRTF的測量,但是十二面體揚聲器近似點源時,在一些頻率范圍內存在較低的信噪比的問題;2009年,中國科學院聲學研究所和北京大學合作采用KRMAR 人工頭測量了近場HRTF 數據庫[13],該數據庫利用特殊的電火花作為激勵聲源,具有較好的全指向性和高信噪比;2018年,華南理工大學發布了不同距離的個性化近場HRTF數據庫[14]。
基于HRTF 的雙耳聲重放技術具有實現簡單、計算復雜度低等優點。但該雙通道信號通過雙揚聲器重放時,雙耳處聲場存在串音,從而模糊虛擬聲像的方位信息,干擾聆聽者對虛擬聲像的判斷,降低重放效果[15]。針對這一問題,1961年,Bauerd[16]提出了串聲消除系統(Cross-talk cancellation system,CCS);1963年,Schroeder 等[17]將串聲消除系統實現并應用到研究之中。雙揚聲器系統的串聲路徑可看作一個兩輸入兩輸出的系統,用2×2 的空間響應傳遞矩陣表示。相應的處理串音干擾的串音消除器(Cross-talk canceller,CTC)是直接測量或者建模得到的空間響應傳遞矩陣的逆[17-18],對輸入揚聲器之前的信號進行預濾波處理,從而消除系統的串音干擾。對基于串聲消除技術的虛擬立體聲聲場重放,Ward 等[19-21]使用參數加權的方法擴大了聲場甜點區范圍,提高其魯棒性;Kirkeb 等[22]引入了最小二乘的方法求解CTC,同時提出了聲偶極子(Dipole)布放方式;Bai 等[23-25]針對CCS 在揚聲器陣列和手機等實際重放系統中的應用,進行了大量實驗性的工作。但已有的雙揚聲器串聲消除系統著重研究遠場聲源的方向感、環繞感,尚未涉及近場聲源的重放及距離感研究。
本文以串聲消除原理為理論基礎,展開雙揚聲器配置下近場聲源不同方向、不同距離條件下虛擬聲源重放實驗研究。研究了多種典型雙揚聲器配置下的近場虛擬聲像的方向感知和距離感知效果,包括Dipole 配置、立體聲配置、環繞聲配置以及揚聲器分別位于雙耳兩側以考察前后混淆現象。實驗分兩部分依次展開:實驗一用于測試近場距離下的虛擬聲像方向辨別準確性,分析方向辨別準確區域和方向辨別模糊區域;實驗二排除方向辨別模糊區域,在方向辨別準確的區域內,測試分析近場虛擬聲像的距離辨別效果。實驗結果表明,在方向角判斷準確的區域,受試者能夠較準確地分辨聲源的不同距離,同時聲源在側方時受試者的距離判定結果更準確。
1 虛擬聲源的重放模型
1.1 模型建立
基于串聲消除的雙揚聲器重放系統,其實質是改變揚聲器的信號輸入,使得揚聲器重放時的雙耳聲壓等于單聲源的情況,也稱這種方法為聽覺傳輸方法[26]。因此,雙揚聲器系統近場聲源的重放是通過調節兩路揚聲器信號的饋給,使得揚聲器重放的雙耳聲壓等于距離受試者1 m 范圍以內的單聲源的情況。圖1給出了雙揚聲器系統的近場聲源重放的示意圖,聲源信號S經過兩個單輸入單輸出的系統,將幅度和相位調節后的信號輸入到左右兩揚聲器播放,最后信號到達受試者雙耳產生與聲源信號S在近場情況下相同的效果。假設聲源信號S經過預濾波器Hpre處理后形成兩揚聲器的輸入信號X,可表示為

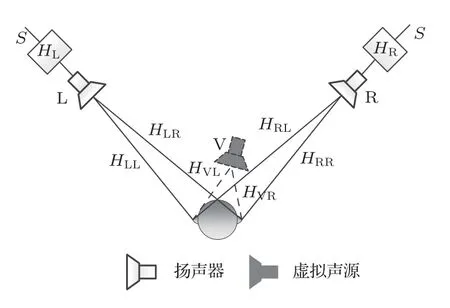
圖1 雙揚聲器系統近場聲源重放示意圖Fig.1 Diagram of near field source reproduction with dual speaker system
信號X經過揚聲器系統(系統包括聲卡、音箱)形成重放信號Y,假設揚聲器系統的頻率響應為H0,則此過程可以表示為

揚聲器重放信號Y經空間傳播后到達受試者雙耳,形成雙耳信號E。則數學形式可表示為

另一方面,假設空間中某一單聲源位于圖中虛擬聲源V 的位置,產生信號S經空間傳播后到達受試者雙耳,形成雙耳信號E′。則數學形式可表示為

要使得揚聲器系統重放的聲像與單聲源產生相同的聽覺效果,則需滿足條件E′=E。根據上述條件,將式(1)、式(2)代入式(3),并結合式(4)可以得到

在實際應用中,揚聲器系統的頻率響應通常會做均衡處理,從而實現兩揚聲器系統的理想匹配。因此,在本文的研究中揚聲器系統的頻率響應H0可以忽略,則式(5)可簡化為

此時,預濾波器Hpre可以表示為

其中,H-1表示揚聲器到受試者雙耳的系統傳遞矩陣的逆矩陣。
實際中布放的揚聲器離受試者的距離一般在1.5 m以上(滿足遠場條件),因此需要選擇遠場的傳遞函數HLL、HLR、HRR和HRL。根據重放虛擬聲源的位置信息,選擇近場的傳遞函數HVL和HVR。根據式(7)可以得到預濾波器Hpre。
1.2 模型求解
預濾波器Hpre的求解,核心問題是對系統傳遞矩陣H進行求逆,一般采用偽逆法。即使使用偽逆法,在某些頻率范圍也會出現病態問題,通常在求逆過程中加入歸一化代價函數(Tikhonov 正則化),使得逆矩陣逼近真實的系統傳遞矩陣的逆。那么,系統傳遞矩陣H的逆矩陣可以表示為[22,27]

其中,HH表示系統傳遞矩陣H的轉置矩陣,β表示正則化代價因子,用于限制濾波器增益和補償奇異值以保證該矩陣可逆,該參數可為常數或與頻率相關。如果β取值太小,式(8)的結果H-1在某些頻點上出現尖銳的峰值;反之,式(8)的結果相比于理想結果存在較大誤差。在實際的求逆過程中,一個精確的β值不是至關重要[22],但是β要保證足夠的通道分離度,即串聲與直達聲之間的幅度比足夠小[27]。
本文取β= 0.005 作為求解逆矩陣過程中的正則化因子,客觀結果表明通道分離度足夠,雖然引入β值會帶來信號音色的輕微改變,但能滿足受試者測聽定位實驗的要求。接著將式(9)代入式(7)可求得預濾波器的形式為

將式(9)得到的結果Hpre代入式(1)可求得聲源信號S經過預濾波器之后的信號X,即為揚聲器的輸入信號。
2 測聽實驗
2.1 實驗配置
實驗在中國科學院聲學研究所的音頻聲學測聽室中完成,室內裝飾吸聲材料和吸聲板,尺寸為4.22 m×4.05 m×3.28 m,混響時間約為0.16 s,本底噪聲平均值為14.8 dB(A)。如圖2所示,實驗使用的揚聲器為兩只Genelec 8030B 有源音箱,聲卡選用Antelope Orion 32,其中揚聲器離受試者的距離為1.5 m,且聲卡與揚聲器之間使用專業Canare 音頻線連接。實驗中模擬聲源的信號為單通道click信號(圖3為信號片段的短時傅里葉功率譜),信號頻率主要在2 kHz,采樣率為44.1 kHz。
在雙耳處輸入信號的計算中,選擇MIT 數據庫[8]中的HRTF 作為左右兩揚聲器到受試者雙耳的傳遞函數,來代表傳遞函數HLL、HLR、HRR和HRL;選擇IOA-PKU數據庫[13]中的HRTF 來代表虛擬聲源到受試者雙耳的傳遞函數HVL、HVR,最后根據式(9)求得預濾波器。將click 信號通過預濾波器的處理,可以得到左右揚聲器的輸入信號X。兩數據庫在測量HRTF時都是在全消聲室采用kemar 人工頭進行測量,頭部的衍射和耳廓耳道的聲濾波特性近似一致,可以避免近遠場數據庫由于測量條件的較大差異帶來的負面影響。但由于兩數據庫測量環境、測量條件和測量方法存在一定差異,而且沒有采用個性化的HRTF,近遠場數據庫代入公式(9)后仍然會帶來一定的感知誤差。
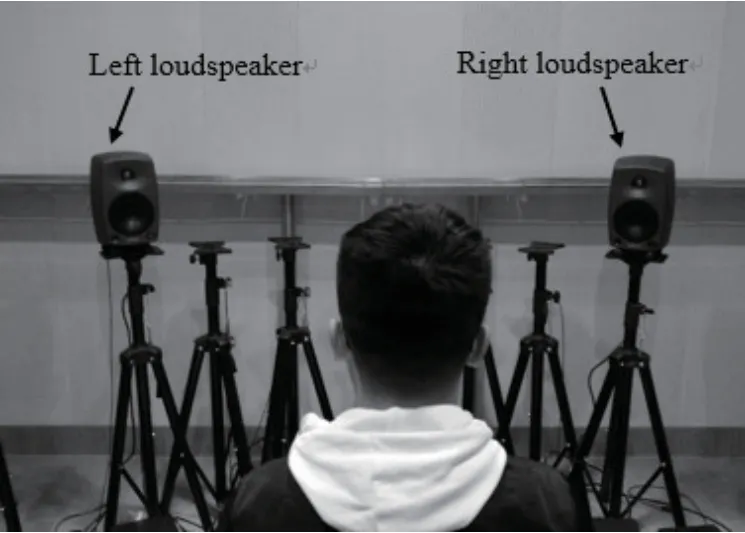
圖2 音頻聲學測聽實驗室Fig.2 Audio acoustic listening test room
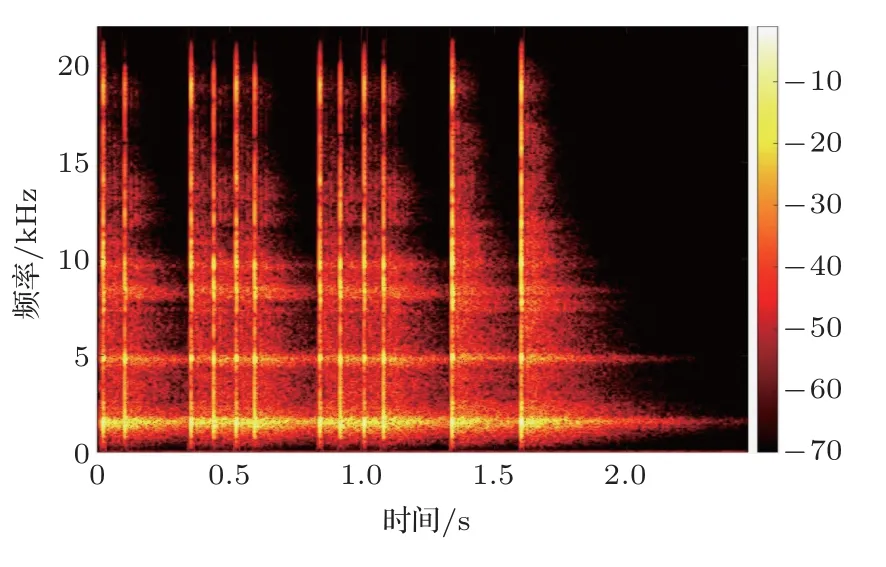
圖3 click 信號的短時傅里葉功率譜Fig.3 Spectrogram of click signal
2.2 實驗設計
測聽實驗使用上文描述的測聽環境和實驗器材。聽力正常的6位受試者(3男3女)參加了測聽實驗。根據雙揚聲器的夾角大小展開了不同的揚聲器配置模式下的測聽實驗:
(1)揚聲器夾角為10°(聲偶極子);
(2)揚聲器夾角為60°(標準立體聲);
(3)揚聲器夾角為180°(揚聲器與中垂面的夾角為直角);
(4)揚聲器夾角為220°(標準5.1聲道中的環繞聲道)。
實驗分兩部分依次展開,分別進行對虛擬聲源方位角和距離的判定。
實驗一安排受試者進行虛擬聲源方位角的判定,以確定虛擬聲源方向判定的準確區域和模糊區域。虛擬聲源方位角的判定在虛源距離等于20 cm、75 cm兩種情形下完成。圖4給出了在4種不同的揚聲器配置模式下需要受試者辨別的虛擬聲源的方向(用虛線表示)。當揚聲器夾角為10°時,如圖4(a)所示,要求每位受試者辨別水平面全方位采樣間隔為30°的虛擬聲源的方向。在此過程中,實驗員隨機重放圖4(a)中虛線所示的不同方向的虛擬聲源,并要求受試者將感受到聲源的方向與圖4(a)中虛線所示的12個方向對應并反饋給實驗員,實驗員隨即記錄反饋結果。
根據初步的測聽實驗結果,圖4(b)~圖4(d)三種配置下受試者對在左半平面和右半平面的虛源感知定位具有近似對稱性。因此為了減少受試者的疲勞感對實驗結果的影響,圖4(b)~圖4(d)三種配置下要求每位受試者完成右半平面采樣間隔為15°的虛擬聲源的方向角判定。在此過程中,實驗員隨機重放上述不同方位的虛擬聲源,并要求受試者將感受到聲源的方向與圖4(b)~圖4(d)中虛線所示的13個方向對應并反饋給實驗員,實驗員隨即記錄反饋結果。要求每位受試者連續完成虛擬聲源距離等于20 cm、75 cm 兩種情形下的測聽,在此過程中,受試者每完成一種距離情形下的測聽之后,安排5 min 時間的休息。當受試者完成實驗一虛擬聲源方位角的判定之后,安排15 min 時間的休息,以便排除測聽疲勞對后續實驗過程的影響。
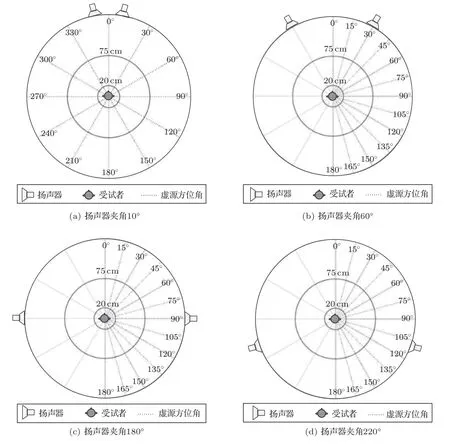
圖4 實驗一揚聲器配置模式及虛源待測方位角示意圖Fig.4 Schematic diagram of loudspeaker configuration and virtual source azimuth to be measured for Experiment One
實驗二安排受試者進行聲源距離的判定。在實驗中,受試者可以用聲源在肩部、肘部或手部去衡量感知的聲源距離,實驗員隨后記錄判定結果,根據每位受試者的肩部、肘部和手部的實際距離將判定結果等效為測量距離。這種方式對距離的判定更精確,因為沒有限定受試者必須把感知距離判定成2 cm、50 cm 和75 cm 幾個離散距離選項。因此,在實驗之前,需要完成對每位受試者的肩、肘、手3 個位置的距離的測量。表1給出參加實驗的受試者肩、肘、手3個位置的測量距離。
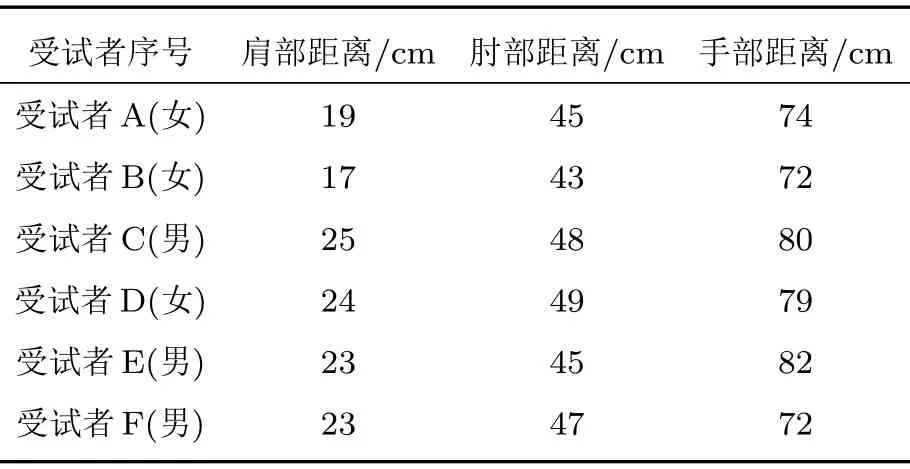
表1 受試者肩部、肘部、手部距離的測量結果Table1 The shouder length,elbow length and hand length
根據實驗一受試者對虛擬聲源方位角的判定結果,當揚聲器夾角為180°(圖4(c))時,受試者出現嚴重的前后混淆現象(如圖6(e)、圖6(f)所示)。因此,在實驗二測聽辨別距離時,只測聽另外3 種配置下受試者對虛擬聲源距離的感知,即揚聲器之間夾角為10°、60°和220°三種情況(圖5)。圖5給出了在3 種不同的揚聲器配置模式下方位角判斷準確的區域內需要受試者判斷的虛擬聲源的距離(用×表示)。當揚聲器夾角為10°時,如圖5(a)所示,在虛擬聲源方位角為0°、30°、60°、300°和330°五種情形下,要求受試者感知實際距離為20 cm、50 cm 和75 cm 的虛擬聲源的距離。當揚聲器夾角為60°時,如圖5(b)所示,在虛擬聲源方位角為0°和30°的情形下,要求受試者感知實際距離為20 cm、50 cm和75 cm 的虛擬聲源的距離。當揚聲器夾角為220°時,如圖5(c)所示,在虛擬聲源方位角為120°、150°和180°三種情形下,要求受試者感知實際距離為20 cm、50 cm 和75 cm 的虛擬聲源的距離。圖5(b)和圖5(c)兩種揚聲器配置模式在預實驗中的聲像感知效果呈左右近似對稱性,且為減少受試者疲勞,實驗僅測試了虛源在右側的區域。
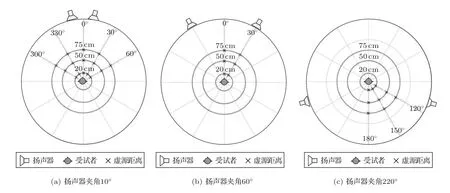
圖5 實驗二揚聲器配置模式及虛源待測距離示意圖Fig.5 Schematic diagram of loudspeaker configuration and virtual source distance to be measured for Experiment Two
3 實驗結果分析
3.1 方位角判定結果分析
在揚聲器夾角不同的情況下,圖6根據6 位受試者的測聽結果分別繪制了虛源距離為20 cm 和75 cm時的角度辨別散點圖。如圖6所示,橫軸表示目標方位角,縱軸表示判斷方位角,虛線表示方位角判斷的理想結果,圓點的大小代表所有受試者角度判斷結果的重合次數。圓點越大判定結果重合的次數越多,也表明受試者對該方位的虛擬聲源的角度感知結果越一致。
圖6(a)和圖6(b)分別給出了受試者在揚聲器夾角為10°時,對距離為20 cm和75 cm的虛擬聲源方位角的測聽結果。從兩圖中可知,大部分受試者可以準確判定前半水平面的虛擬聲源,但對于正前方和正后方的虛擬聲源,受試者存在嚴重的前后混淆現象。對于右側區域的虛擬聲源,受試者基本將其判定為30°或者60°方向的虛擬聲源,但似乎結果存在較大的離散性(例如最為明顯的120°方向,散點分散度很高)。然而,對于左側區域的虛擬聲源,受試者完全將其判定為300°或者330°方向的虛擬聲源,結果集聚性很強。這說明偶極子布放方式重放的聲像左側區域比右側區域明顯。
圖6(c)和圖6(d)分別給出了受試者在揚聲器夾角為60°時,對距離為20 cm和75 cm的虛擬聲源方位角的測聽結果。從兩圖中可知,當重放虛擬聲源位于前半水平面時,受試者基本都能準確判定其位置。當重放虛擬聲源位于后半水平面時,受試者將實際的后方虛擬聲源判定為前方虛擬聲源,出現后前混淆問題。當重放虛擬聲源位于揚聲器夾角區域之外時,受試者很難區別這個區間的虛擬聲源的具體方向。因此,本文稱這個區間為方向辨別模糊區間。比較兩圖可知,當虛擬聲源距離增大時,受試者的方向辨別模糊區間變小。

圖6 實驗一受試者方位角測聽結果Fig.6 Results of the azimuth localization in Experiment One
圖6(e)和圖6(f)分別給出了受試者在揚聲器夾角為180°時,對距離為20 cm 和75 cm 的虛擬聲源方位角的測聽結果。從兩圖中可知,當重放虛擬聲源位于前半水平面時,受試者前后混淆問題嚴重。當重放虛擬聲源位于后半水平面時,混淆問題減弱。其中重放虛擬聲源位于90°時,受試者都能準確判定其方位角。比較兩圖可以看出,當虛擬聲源距離增大時,受試者的測聽結果的準確度提高。
圖6(g)和圖6(h)分別給出了受試者在揚聲器夾角為220°時,對距離為20 cm 和75 cm 的虛擬聲源方位角的測聽結果。從兩圖中可知,當重放虛擬聲源位于后半水平面時,受試者基本都能準確判定其位置。當重放虛擬聲源位于前半水平面時,受試者基本完全將前方虛擬聲源判定為關于前平面對稱的后方虛擬聲源,出現前后混淆問題。比較兩圖,當虛擬聲源距離增大時,受試者的測聽結果準確度提高。
對于前后混淆現象,文獻[6]中指出,耳廓對聲波的反射和散射所引起的譜因素對前后方向的聲源定位非常重要。但耳廓引起的譜因素極具個性化特征,且僅對高于5 kHz~6 kHz 的高頻聲波有效,而且由于頭部偏移耳廓難以帶來穩定可靠的定位因素。而對于1 kHz~2 kHz 以下的低頻情況,HRTF 是近似前后對稱的,難以分清前后。由于上述原因非個性化HRTF極易產生前后混淆現象。
總之,當虛源與揚聲器同處于前半水平面或同處于后半水平面時,受試者可以準確判定虛擬聲源的方向;當重放虛擬聲源位于揚聲器夾角之外時,受試者無法準確判定虛擬聲源的方向;當虛擬聲源距離增大時,受試者的測聽結果準確度提高。
3.2 距離判定結果分析
在揚聲器夾角為10°、60°和220°的情況下,圖7~圖9根據受試者對于不同方向虛擬聲源距離的感知結果繪制了散點圖。其中,橫軸表示目標距離,縱軸表示判定距離,虛線表示距離判定的理想結果,圓點代表每位受試者對虛擬聲源距離的判定結果。圖7~圖9顯示的主觀距離判定是受試者感知的實際結果,而不是把距離判定成離散的某幾個目標距離,一定程度上可以更準確地衡量受試者的實際距離感知。由于不同受試者肩部、肘部、手部的測量長度存在相同的情況,因此對于感知距離結果重合的情況采用較大的圓點表示。

圖7 揚聲器夾角10°,受試者虛源距離測聽結果Fig.7 The angle between the two speakers is 10°,and the results of the distance localization

圖8 揚聲器夾角60°,受試者虛源距離測聽結果Fig.8 The angle between the two speakers is 60°,and the results of the distance localization

圖9 揚聲器夾角220°,受試者虛源距離測聽結果Fig.9 The angle between the two speakers is 220°,and the results of the distance localization
當揚聲器夾角為10°時,距離感知散點圖如圖7所示。其中,圖7(a)表示虛源位于0°方向時不同受試者虛源距離的判斷結果,從圖中可看出受試者對0°方向虛擬聲源的距離感較差。當虛擬聲源的方向偏離0°時,受試者對不同目標距離的虛擬聲源定位準確度明顯提高,其中最明顯的為側方聲源,即60°方向和300°方向。將右側與左側的測聽結果對比,可以看出受試者對左側虛擬聲源的感知距離較近。
當揚聲器夾角為60°時,距離感知散點圖如圖8所示。其中,圖8(a)表示虛源0°方向時不同受試者虛源距離的判斷結果,從圖中可看出受試者對0°方向虛擬聲源的距離感較差,所有受試者都存在多次判斷錯誤的情況,尤其當虛擬聲源的目標距離為20 cm 時,受試者完全無法正確判定。圖8(b)表示虛源30°方向不同受試者虛源距離的判斷結果,從圖中可看出受試者對30°方向虛擬聲源的距離判定結果分布更靠近圖中理想虛線兩側,大部分受試者可以正確感知目標距離為20 cm 處的虛擬聲源,所有受試者可以正確感知目標距離為75 cm的虛擬聲源。總體而言,受試者對稍遠距離聲源和側方聲源的距離感知更準確。
當揚聲器夾角為220°時,距離感知散點圖如圖9所示。其中,圖9(a)表示虛源120°方向時不同受試者虛源距離的判斷結果,從圖中可看出受試者對120°方向的虛擬聲源距離感較好,判定結果分布靠近圖中理想虛線兩側;圖9(b)表示虛源150°方向時不同受試者虛源距離的的判斷結果,從圖中可看出大部分受試者可以正確判斷不同距離的虛源,相比120°方向虛擬聲源的判定結果,其結果更偏離于理想虛線兩側;圖9(c)表示虛源180°方向時不同受試者虛源距離的判斷結果,相比于120°和150°方向虛擬聲源的判定結果,圖9(c)中受試者的判定結果最偏離于理想虛線兩側,受試者存在多次判斷錯誤的情況。因此,受試者對側方虛擬聲源的距離感優于180°方向虛擬聲源的距離感,其中對120°方向的虛擬聲源的距離感最好,基本可準確區分不同距離的虛源。同樣說明受試者對側方聲源的距離感更準確。
4 結論
本文基于不同距離的HRTF,通過串聲消除的方法實現在多種典型的雙揚聲器配置下近場虛擬聲源的重放,并對其完成了實驗測聽研究。測聽結果表明該雙耳合成技術存在前后混淆現象,一對前方左右揚聲器布置難以產生后半水平面范圍的虛擬源,一對后方左右揚聲器不能產生前半水平面的虛擬源。但在方位角判斷準確的方向上,可對虛擬源感知距離進行控制,特別是當方向角越偏離中垂面時,對感知距離控制的準確度越高。該測聽結果也驗證了所采用的近場HRTF數據庫的有效性。如何在雙揚聲器重放近場聲源時增強距離控制準確度也值得進一步研究。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
