鏡片智能檢測的SCARA機械臂軌跡規劃信息研究
2020-07-22 09:57:27崔鼎郝南海郭陽寬
數字技術與應用 2020年6期
關鍵詞:機械臂
崔鼎 郝南海 郭陽寬
摘要:本文設計了用于鏡片檢測工序的SCARA機械臂系統并對其抓取鏡片的軌跡規劃進行了研究。搭建機械臂硬件系統并對比使用三次多項式插值算法和五次多項式插值法算法進行軌跡規劃。實驗結果表明五次多項式插值算法對機械臂運行沖擊更小。
關鍵詞:鏡片檢測;機械臂;軌跡規劃;多項式插值
中圖分類號:TP27 ? ? 文獻標識碼:A ? ?文章編號:1007-9416(2020)06-0000-00
0 引言
在工作的鏡片檢測工序中,工人需要從傳輸帶上拿取鏡片并放置到檢測工作臺上,待檢測完畢后再放置傳送帶上。由于檢測樣品數量大、品種多,這種方法不僅耗時長、效率低。而且長時間的機械工作對工人的身體也會造成潛在的危害[1-2]。鑒于機械臂工作具有高精度、高效率、高實時性等優點[3],本文設計了一款用于鏡片檢測工序的SCAR機械臂系統。
1 SCARA機械臂系統設計
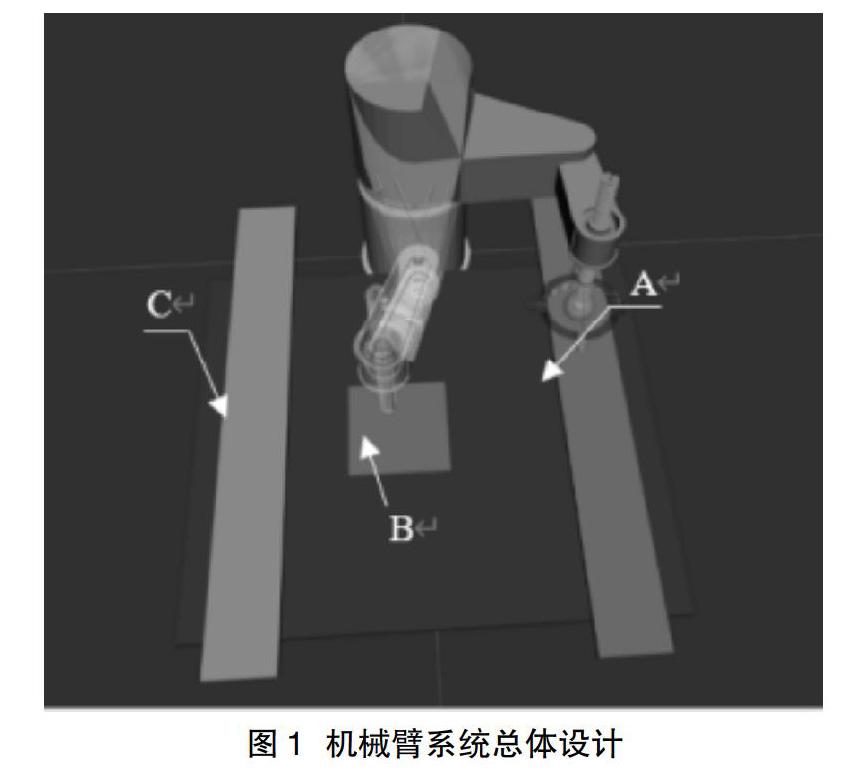
機械臂系統總體設計如圖1所示。由傳送帶A和C、檢測臺B、機械臂、計算機組成。當鏡片由傳送帶A輸送到檢測臺B時,機械臂末端通過吸盤抓取鏡片運動到檢測點進行檢測。檢測完畢后,機械臂根據檢測結果抓取鏡片置到傳送帶C送走。
2 機械臂軌跡規劃
當起始點到目標點中間的路徑沒有障礙物時,以機械臂的軌跡為研究對象,采用三次多項式插值法和五次多項式插值法分別對其進行軌跡規劃,通過對比兩種插值法的效果,選取效果更優者對SCARA機械臂進行軌跡規劃。
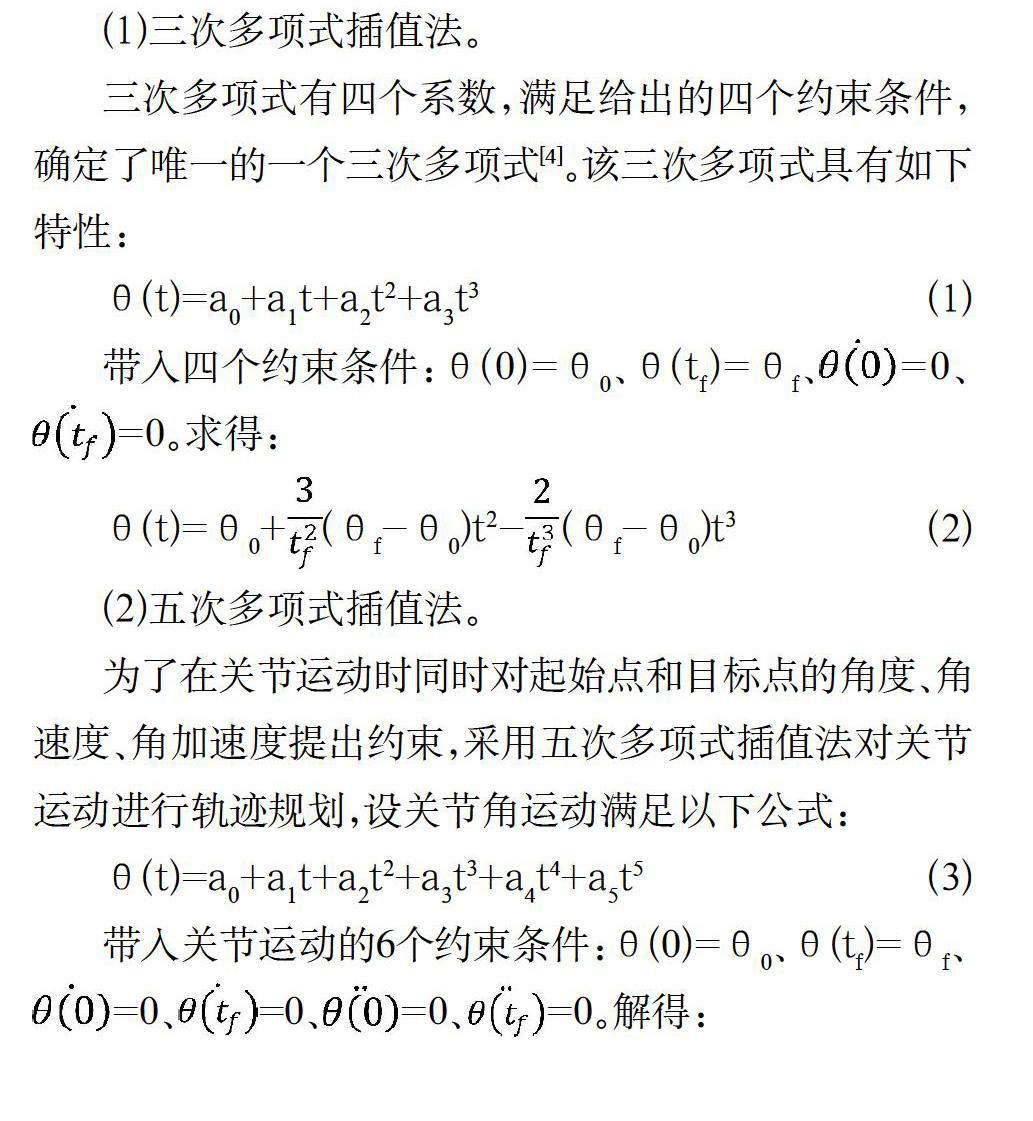
(1)三次多項式插值法。
(2)五次多項式插值法。
為了在關節運動時同時對起始點和目標點的角度、角速度、角加速度提出約束,采用五次多項式插值法對關節運動進行軌跡規劃,設關節角運動滿足以下公式:
3 實驗與分析
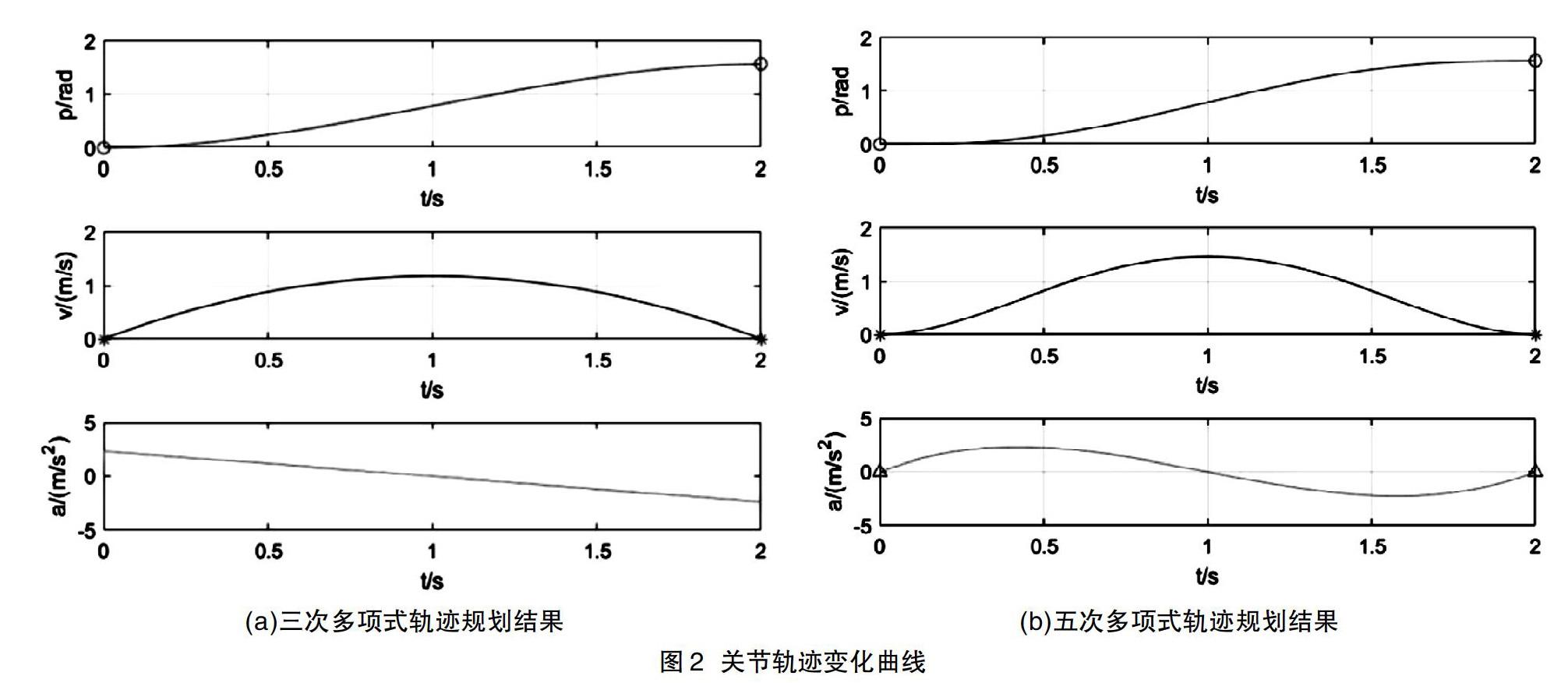
規定機械臂在2s內從0運動到1.57rad,圖2為關節軌跡變化曲線。可以看到三次多項式軌跡規劃的角位移、速度曲線都是光滑的,但是加速度在開始和結束的時候并不為0,意味著機械臂運動的開始和結束存在運動突變;五次多項式軌跡規的角位移、速度曲線均光滑,加速度在開始和結束的時候為0,意味著機械臂運動的開始和結束不存在沖擊了。
4 結語
本文完成了用于鏡片檢測的SCARA機械臂系統的搭建。針對機械臂抓取鏡片從傳送帶運動到檢測點的軌跡規劃問題。實驗表面,五次多項式插值法規劃的軌跡的角度、角速度、角加速度曲線更平穩,對機械臂的沖擊更小。
參考文獻
[1] 高峰,郭為忠.中國機器人的發展戰略思考[J].機械工程學報,2016,52(7):1-5
[2] 王卓.樹脂鏡片制造企業產品國產化項目的計劃與控制的研究[D].上海:上海交通大學,2015.
[3] Anonymous.Eureka;Shape-shifting robot plane offers safer alternative for maritime rescue[J].NewsRx Health & Science,2018,42(20):75-76.
[4] 李芳,顧海巍.噴涂機器人運動學與軌跡規劃算法研究[J].組合機床與自動化加工技術,2017(12):25-28+32.
收稿日期:2020-04-14
作者簡介:崔鼎(1992—),男,江蘇鹽城人,碩士,研究方向:機器人及其控制。
通訊作者:郝南海(1963—),男,山東威海人,博士,北京信息科技大學機電工程學院教授,研究方向:先進制造技術、工業工程。
猜你喜歡
科技與創新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業技術(2017年4期)2017-03-28 07:56:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯網技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28
