飛輪電池模糊控制策略研究
2020-08-12 12:00:22張云聰謝振宇程偉超郝建勝
機(jī)械制造與自動化 2020年4期
張云聰,謝振宇,程偉超,郝建勝
(南京航空航天大學(xué) 直升機(jī)傳動技術(shù)重點實驗室,江蘇 南京 210016)
0 引言
近年來,隨著磁懸浮技術(shù)、電機(jī)技術(shù)、控制技術(shù)和新材料技術(shù)的進(jìn)步,飛輪電池技術(shù)得到了很大的發(fā)展。與化學(xué)電池相比,飛輪電池具有儲能密度大、能量密度高、使用壽命長、轉(zhuǎn)換效率高、無環(huán)境污染等優(yōu)點[1]。飛輪電池單獨或和其他動力裝置混合用于電動汽車,可以大大改善汽車的動力性能和汽車尾氣的排放情況。
為了提高飛輪電池的比能量和比功率,需進(jìn)一步提高飛輪的極限轉(zhuǎn)速。磁懸浮軸承具有無需潤滑、無接觸磨損、壽命長、無污染、轉(zhuǎn)速高、支撐剛度和阻尼可調(diào)等優(yōu)點[2],將磁懸浮軸承應(yīng)用于飛輪電池,不僅能提高飛輪轉(zhuǎn)子的極限轉(zhuǎn)速,還能大大減少飛輪轉(zhuǎn)子在高速旋轉(zhuǎn)中的摩擦損耗,有效提高能量的利用率。
飛輪電池是一個復(fù)雜的機(jī)電綜合系統(tǒng),電磁力是非線性力,轉(zhuǎn)速變化范圍大,系統(tǒng)具有很強(qiáng)的非線性,故很難精確建立系統(tǒng)的數(shù)學(xué)模型。另外,因路況比較復(fù)雜,汽車會出現(xiàn)頻繁的加速、剎車、轉(zhuǎn)彎、上坡、下坡及車體傾斜等情況,陀螺擾動力矩和慣性力也很難準(zhǔn)確描述。
針對磁懸浮軸承的非線性、強(qiáng)耦合性等特點,新的控制算法不斷應(yīng)用于磁軸承控制系統(tǒng)中。HABIB M K等[3]設(shè)計了一種自適應(yīng)模糊控制應(yīng)用于主動磁懸浮軸承,并進(jìn)行動態(tài)仿真,仿真結(jié)果表明該控制對系統(tǒng)的階躍響應(yīng)有良好的改善。龐杰[4]將神經(jīng)網(wǎng)絡(luò)控制理論應(yīng)用于主動磁懸浮軸承系統(tǒng)中,實現(xiàn)了轉(zhuǎn)子五自由度穩(wěn)定懸浮,并且在有外界沖擊的情況下,仍能達(dá)到較高的控制精度。
本文采用模糊控制和PID控制相結(jié)合,開發(fā)了基于FPGA控制器的飛輪電池模糊自調(diào)整PID控制策略,根據(jù)磁懸浮軸承實際運行情況,通過模糊推理實時地調(diào)整控制參數(shù),確保系統(tǒng)具有良好的動態(tài)性能。
1 飛輪電池結(jié)構(gòu)及控制原理
飛輪電池的機(jī)械結(jié)構(gòu)如圖1所示。飛輪轉(zhuǎn)子1是能量儲存和轉(zhuǎn)換的載體;電渦流傳感器2主要包括上徑向、下徑向和軸向位移傳感器,用于檢測和采集飛輪轉(zhuǎn)子的位移振動情況;3和6分別為上、下徑向磁懸浮軸承,為飛輪轉(zhuǎn)子提供徑向懸浮力,限制徑向(x方向、y方向、繞x軸的旋轉(zhuǎn)和繞y軸的旋轉(zhuǎn))4個方向的自由度;內(nèi)置異步電機(jī)4外接變頻器,帶動飛輪轉(zhuǎn)子高速旋轉(zhuǎn);軸向磁懸浮軸承5為飛輪轉(zhuǎn)子提供軸向懸浮力,限制z軸方向移動自由度;真空殼體7一方面是為了減少飛輪旋轉(zhuǎn)時的風(fēng)阻,減小摩擦損耗,另一方面在飛輪破壞失效時起到保護(hù)作用。
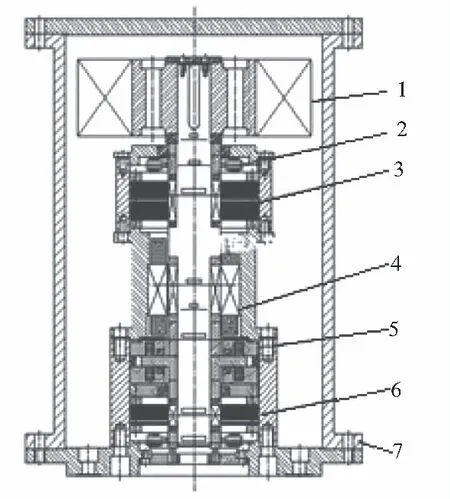
1—飛輪轉(zhuǎn)子;2—電渦流傳感器;3—上徑向磁懸浮軸承;4—內(nèi)置異步電機(jī);5—軸向磁懸浮軸承;6—下徑向磁懸浮軸承;7—真空殼體。圖1 飛輪電池機(jī)械結(jié)構(gòu)圖
圖2為磁懸浮軸承系統(tǒng)控制原理圖。位移傳感器檢測轉(zhuǎn)子的位置信號u與參考信號u0進(jìn)行比較,得到位置偏差信號ue并送入數(shù)字控制器;數(shù)字控制器經(jīng)過一定的控制算法后得到控制信號uc并送入功率放大器;功率放大器根據(jù)控制信號uc在相對布置的電磁鐵線圈內(nèi)產(chǎn)生相應(yīng)的差動電流,進(jìn)而產(chǎn)生差動電磁力;轉(zhuǎn)子在差動電磁力作用下,回到設(shè)定的參考位置。如,當(dāng)轉(zhuǎn)子向下偏移時,位置偏差信號ue>0,位置控制信號uc>0,電磁鐵1線圈內(nèi)的電流為(I0+Ic),電磁鐵2線圈內(nèi)的電流為(I0-Ic),電磁鐵1的電流大于電磁鐵2的電流,電磁鐵1的磁力大于電磁鐵2的磁力,使轉(zhuǎn)子在差動電磁力作用下回到指定參考位置。
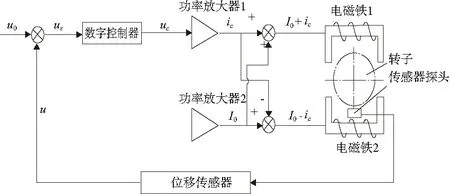
圖2 磁懸浮軸承系統(tǒng)控制原理圖
2 模糊控制器的設(shè)計與仿真
2.1 模糊控制器原理
對于磁懸浮軸承支承的飛輪電池,由于路況復(fù)雜以及汽車不同的運動狀態(tài),使系統(tǒng)很難建立精確的數(shù)學(xué)模型,控制參數(shù)的不確定,使磁懸浮軸承具有非線性、磁滯性、強(qiáng)耦合性。因此普通PID控制策略無法滿足控制要求。模糊控制不依賴系統(tǒng)的精確數(shù)學(xué)模型,能實現(xiàn)控制參數(shù)的自調(diào)整。采用模糊控制和PID控制結(jié)合的控制策略,以飛輪電池作為控制對象,選用轉(zhuǎn)子實際位置與參考位置產(chǎn)生的偏差e和偏差變化率ec為模糊控制器的輸入,根據(jù)試驗得到的經(jīng)驗建立模糊控制庫,經(jīng)過模糊推理后轉(zhuǎn)化為PID控制的3個系數(shù)KP、KI、KD。控制原理如圖3所示。
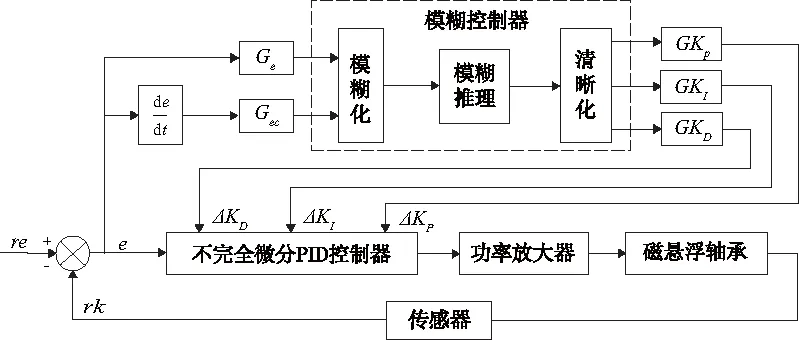
圖3 模糊自調(diào)整PID控制器的工作原理
2.2 輸入量模糊化
在本文的試驗系統(tǒng)中,AD芯片的采樣范圍為0~5V,期望值為中點2.5V,因此選擇偏差e的基本論域為[-2.5,+2.5],偏差變化率ec的基本論域為[-5,+5]。物理論域經(jīng)過量化得到輸入變量模糊論域:e,ec={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},此時,e的量化因子為2.4,ec的量化因子為1.2。
輸出變量模糊論域:△KP、△KI、△KD={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。
要實現(xiàn)變量模糊化,首先要確定模糊論域上的模糊子集以及各個模糊子集對應(yīng)的隸屬函數(shù)形式。一般而言,模糊論域上模糊子集個數(shù)越多,模糊控制的過程就越精細(xì),但模糊推理過程需要的時間就越多。綜合考慮,本文最終確定的輸入變量和輸出變量的模糊子集分別定義為NB(負(fù)大),NM(負(fù)中),NS(負(fù)小),ZO(零),PS(正大),PM(正中),PB(正大)。
隸屬函數(shù)有三角形、梯形、S形、Z形等多種函數(shù)。隸屬函數(shù)形狀尖的子集,分辨率和控制靈敏度高;隸屬函數(shù)平緩的子集,控制特性平緩,系統(tǒng)穩(wěn)定性相對較好。本文的所有輸入函數(shù)和輸出函數(shù)中,NB為Z形函數(shù),PB為S形函數(shù),相對平緩;其余取三角形隸屬函數(shù)。以變量e為例,其模糊論域中模糊子集隸屬函數(shù)分布如圖4所示。
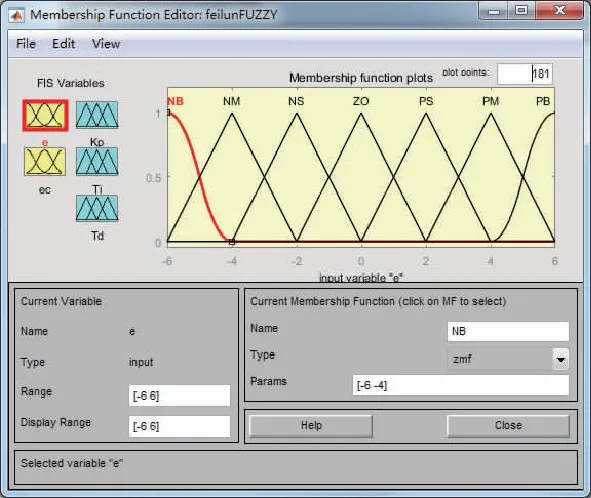
圖4 e的隸屬函數(shù)
2.3 模糊自調(diào)整控制規(guī)則
模糊控制規(guī)則是模糊控制器設(shè)計的核心工作,建立模糊控制規(guī)則常用的方法是根據(jù)設(shè)計人員的技術(shù)和實際經(jīng)驗歸納總結(jié)出來的。根據(jù)控制參數(shù)調(diào)試經(jīng)驗,歸納總結(jié)了KP、KI和KD在不同e、ec組合情況下變化的規(guī)則如下:
1) 當(dāng)|e|較大時,此時需要提升系統(tǒng)反應(yīng)速度,即增大KP,因為積分環(huán)節(jié)主要對穩(wěn)態(tài)精度影響較大,此時可以不用積分環(huán)節(jié),使KI趨向0,KD要偏小。
2) 當(dāng)|e|較小時,轉(zhuǎn)子接近平衡位置,此時需要優(yōu)先增強(qiáng)積分作用,即增加KI,進(jìn)一步提高控制精度,同時應(yīng)該適當(dāng)增加KP提升轉(zhuǎn)子支撐剛度,為避免系統(tǒng)在平衡點處出現(xiàn)振蕩,KD的取值應(yīng)恰當(dāng)。
3) 當(dāng)|e|和|ec|都適中時,為了使系統(tǒng)不產(chǎn)生較大的超調(diào)量,此時應(yīng)適當(dāng)減小KP,為了使位移盡快收斂,需要稍微增強(qiáng)積分作用,即增加KI,KD取值適中。
根據(jù)上述自整定規(guī)則和實際試驗,最終確定PID 3個控制參數(shù)的模糊控制規(guī)則表,其中△KP的規(guī)則如表1所示。
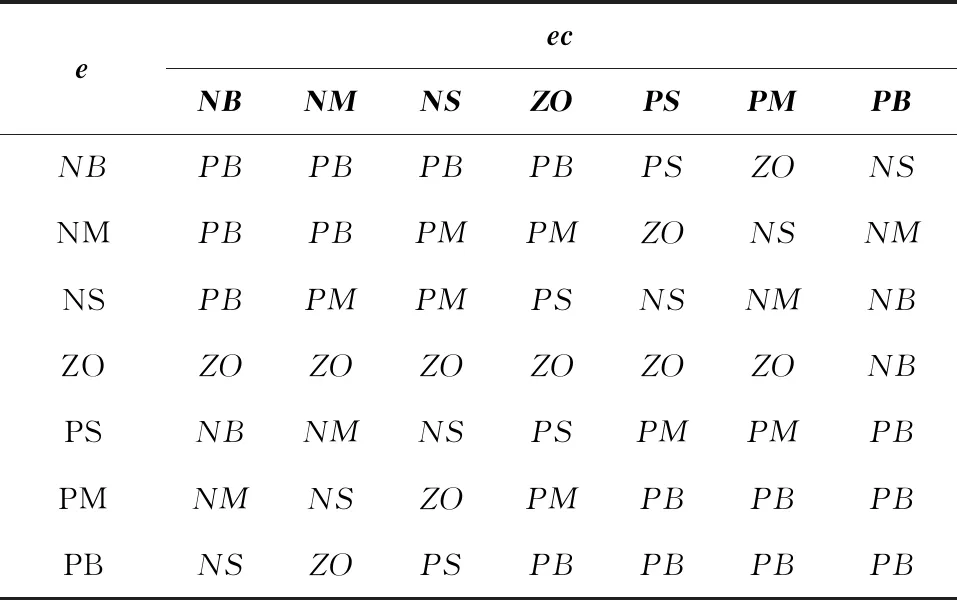
表1 △KP的模糊規(guī)則
在MATLAB的模糊規(guī)則編輯器(rule editor)里將△KP、△KI、△KD控制規(guī)則用模糊條件語句(if…than結(jié)構(gòu))進(jìn)行描述,e、ec的組合用“and”,因為e、ec各有7個模糊子集,所以會有7×7種模糊條件語句,具體如圖5所示。
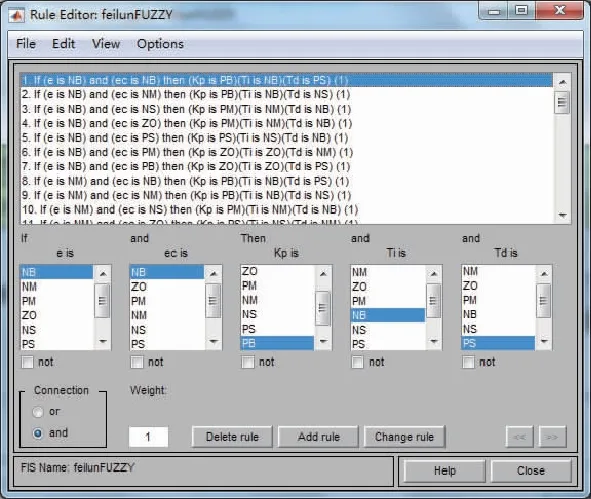
圖5 模糊規(guī)則編輯器△KP 、△KI 、△KD中的控制規(guī)則
2.4 清晰化模塊
模糊控制器的輸出為模糊量,需要把模糊量轉(zhuǎn)化為清晰量,才能用于控制執(zhí)行機(jī)構(gòu)。常用的清晰化方法有二等分法(bisector)、面積重心法(centroid)、中間最大值法(mom)等。本文選用面積重心法進(jìn)行清晰化處理。設(shè)論域U上集合A的隸屬函數(shù)為A(u),精確輸出量ucen由計算公式(1)求出:
(1)
在MATLAB模糊邏輯工具箱的去模糊化(defuzzification)選項設(shè)置為面積重心法。
2.5 系統(tǒng)仿真研究
根據(jù)系統(tǒng)各環(huán)節(jié)的數(shù)學(xué)模型,利用MATLAB/Simulink基本模塊和模糊邏輯控制器(fuzzy logic controller)模塊搭建系統(tǒng)模型,分別對不完全微分PID控制和模糊自調(diào)整PID控制進(jìn)行仿真研究,比較兩種控制策略的優(yōu)劣。選取兩種控制策略初始控制參數(shù)一致,控制參數(shù)由仿真結(jié)果和實際調(diào)試確定。在t=0.25s時加入一個幅值為0.3V的脈沖激勵信號。圖6為不完全微分PID控制和模糊自調(diào)整PID控制策略仿真圖,圖7為仿真結(jié)果曲線。
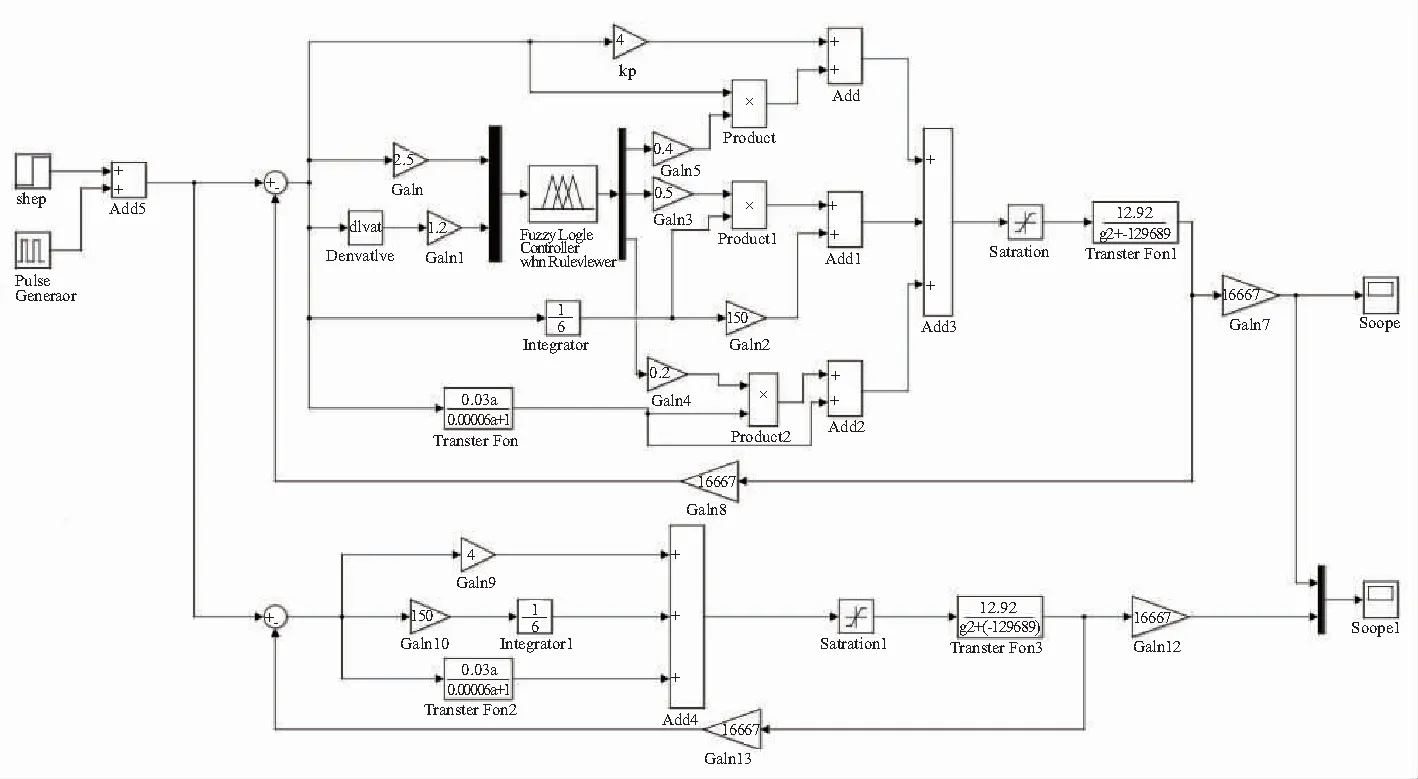
圖6 兩種控制策略系統(tǒng)仿真圖
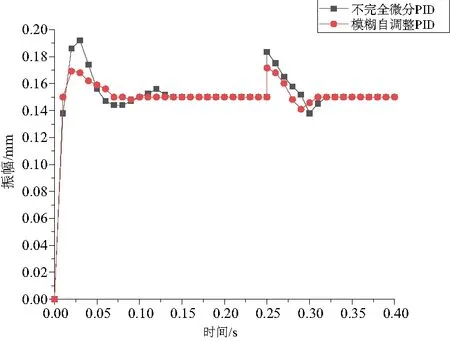
圖7 兩種控制策略仿真曲線
表2是兩種控制策略下的振動隨時間變化的仿真曲線。由表2可知:模糊自調(diào)整PID調(diào)節(jié)時間更短,超調(diào)量更小,在起浮和外界激勵下控制效果優(yōu)于不完全微分PID。
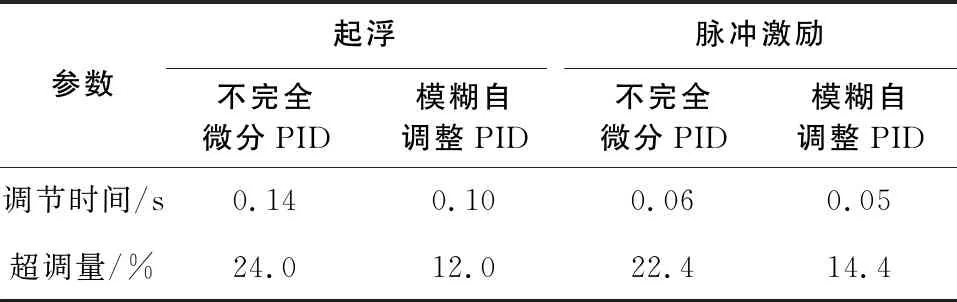
表2 兩種控制策略下的振動對比
3 模糊控制器軟件設(shè)計
本文模糊控制策略的實現(xiàn)主要包括AD轉(zhuǎn)換模塊,模糊PID控制模塊,電流PI控制模塊和PWM模塊,其流程圖如圖8所示。
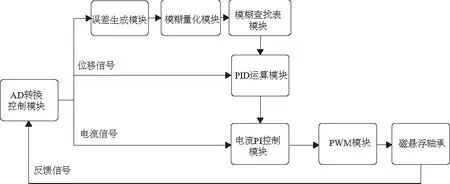
圖8 模糊自調(diào)整PID流程圖
3.1 AD轉(zhuǎn)換控制模塊
AD轉(zhuǎn)換控制模塊主要是控制AD芯片數(shù)據(jù)的讀寫操作、通道的選擇和數(shù)據(jù)傳輸形式。DB0-DB11為雙向I/O口,DB[11..0]為輸入口時,接受AD芯片轉(zhuǎn)換后的數(shù)據(jù)并送入后續(xù)的處理模塊;DB[11..0]為輸出口時,數(shù)據(jù)輸出給AD7938的12位控制寄存器位,控制AD芯片的工作方式。表3為各寄存器位對應(yīng)的含義。

表3 AD7938控制寄存器位含義
3.2 模糊PID控制模塊
模糊PID控制模塊主要包括誤差生成模塊、模糊量化模塊、模糊查找表模塊和PID運算模塊。
誤差生成模塊是將AD模塊采集到的位移信號rk與參考信號refer作比較,獲得誤差信號e和誤差變化率信號ec,其中參考信號refer放在FPGA內(nèi)部寄存器中。誤差生成模塊RTL級映射如圖9所示。
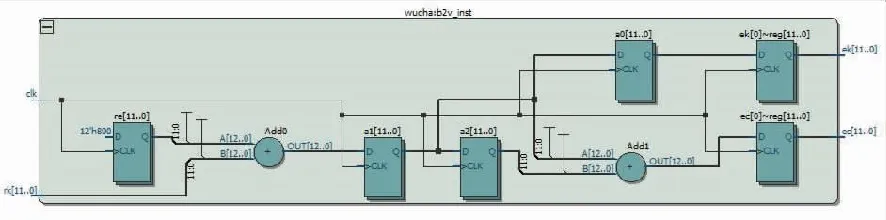
圖9 誤差生成模塊RTL級映射
模糊量化模塊是將誤差信號e和誤差變化率信號ec進(jìn)行模糊化處理得到模糊量的過程。在本模塊中,誤差e和誤差變化率ec的模糊量化與MATLAB中的模糊子集和隸屬函數(shù)的選取一致,最終模糊量化后的值為{111,110,101,000,001,010,011}。
模糊查找表模塊主要是實現(xiàn)模糊推理和解模糊的過程。本文借助MATLAB模糊邏輯工具箱,按照一定的規(guī)則生成查找表并存儲在rom中,以誤差e和誤差變化率ec模糊量化后的值為地址,通過查找方式得到△KP、△KI、△KD3個參數(shù)。考慮轉(zhuǎn)子旋轉(zhuǎn)時,主要振動來源為轉(zhuǎn)子不平衡量所引起的周期性振動,以轉(zhuǎn)子旋轉(zhuǎn)時轉(zhuǎn)子實際位置與參考信號產(chǎn)生的偏差e和偏差變化率ec作為測試信號,得到此模塊的仿真圖如圖10 所示。

圖10 模糊查找表模塊測試仿真圖
PID運算模塊是將不完全微分PID與模糊控制結(jié)合的過程。不完全微分PID控制器的傳遞函數(shù)可表示為:
(2)
式中:KP、KI、KD分別是比例、積分和微分環(huán)節(jié)的增益;Tf為濾波時間常數(shù)。
為了對不完全微分PID控制算法編程,采用一階向后差分方法對各環(huán)節(jié)進(jìn)行離散化,得到離散PID,將△KP、△KI、△KD3個參數(shù)經(jīng)過一定運算處理得到ΔKP_1,ΔKI_1,ΔKD_1,加入到PID控制環(huán)節(jié),構(gòu)成模糊PID控制,各環(huán)節(jié)輸出如下:
比例環(huán)節(jié):Up(k)=(Kp+ΔKP_1)E(k)
(3)
積分環(huán)節(jié):Ui(k)=Ui(k-1)+(Kp+ΔKP_1)(KI+ΔKI_1)E(k)
(4)
微分環(huán)節(jié):Ud(k)=(Kd1+ΔKd_1)[E(k)-E(k-1)]+Kd2Ud(k-1)
(5)
控制器總輸出:U(k)=Up(k)+Ui(k)+Ud(k)
(6)
對本模塊搭建頂層文件,對頂層文件進(jìn)行整體仿真,輸出仿真結(jié)果如圖11所示。可以看出,輸出能快速地響應(yīng)輸入,且輸出滿足要求。

圖11 模糊PID模塊測試仿真圖
3.3 電流PI控制模塊
電流PI控制模塊是對電流信號和位移控制信號進(jìn)行運算的模塊。本文采用PI控制,其傳遞函數(shù)為:
(7)
考慮到FPGA內(nèi)部乘法器資源寶貴,電流控制模塊采用移位方式實現(xiàn)比例和積分運算,同時為了防止積分過量的問題,采取抗飽和積分措施,即當(dāng)電流控制量超過額定極限值時,只計算反向偏差。
3.4 PWM模塊
PWM(脈沖寬度調(diào)制)無需數(shù)模轉(zhuǎn)換,可從FPGA直接輸出給MOS管,實現(xiàn)MOS管導(dǎo)通時間的改變,控制磁軸承電流的變化。在FPGA內(nèi)部,利用線性計數(shù)器和比較器產(chǎn)生PWM波形。電流控制模塊輸出的控制量與計數(shù)器的值作比較,當(dāng)控制量大于計數(shù)器的值時輸出高電平,反之,輸出低電平,控制量的不同實現(xiàn)PWM波形占空比不同。通過改變計數(shù)器循環(huán)頻率改變PWM波形的頻率,考慮到實際系統(tǒng)的需要及功率器件的壽命,本文設(shè)定的PWM的頻率為25 kHz。
在Modelsim軟件里對本文PWM模塊仿真,仿真結(jié)果如圖12,可以看出PWM波形頻率為25 kHz,隨著輸入的改變,輸出的占空比跟著改變,且波形無毛刺、平滑,滿足設(shè)計要求。

圖12 PWM模塊測試仿真圖
在Quartus II中采用自頂向下的設(shè)計方法,在頂層進(jìn)行系統(tǒng)的模塊劃分和設(shè)計,然后用Verilog HDL語言和原理圖結(jié)合的方法進(jìn)行電路設(shè)計,最終得到飛輪電池FPGA五自由度模糊控制系統(tǒng)頂層結(jié)構(gòu)圖。將其下載到某公司的Cyclone IV系列中的EP4CE22E22C8芯片的電路板上進(jìn)行試驗。
4 系統(tǒng)高速運行試驗
圖13為飛輪電池試驗系統(tǒng)實物圖。飛輪電池試驗系統(tǒng)主要包括飛輪電池機(jī)械系統(tǒng)、磁懸浮軸承電控系統(tǒng)、變頻器、PC機(jī)、示波器和數(shù)據(jù)采集系統(tǒng)。

圖13 飛輪電池試驗系統(tǒng)實物圖
機(jī)械系統(tǒng)包括飛輪轉(zhuǎn)子、徑向磁懸浮軸承、軸向磁懸浮軸承、電機(jī)定子等,是能量轉(zhuǎn)換的載體;電控系統(tǒng)包括傳感器、控制器和功率放大器,是本系統(tǒng)的核心,其性能的好壞對飛輪轉(zhuǎn)子精度具有決定性作用。變頻器驅(qū)動電機(jī)定子帶動飛輪轉(zhuǎn)子高速旋轉(zhuǎn);PC機(jī)用來編寫調(diào)試程序并通過下載線與數(shù)字控制器相連,將編寫的程序燒寫進(jìn)FPGA;示波器用來觀察轉(zhuǎn)子各自由度的位移信號和電流信號的變化,數(shù)據(jù)采集系統(tǒng)用來采集轉(zhuǎn)子振動信號進(jìn)行頻譜分析。
試驗分兩組進(jìn)行,一組采用不完全微分PID控制策略,一組采用模糊PID控制策略,兩組初始控制參數(shù)完全一樣,如表4所示。
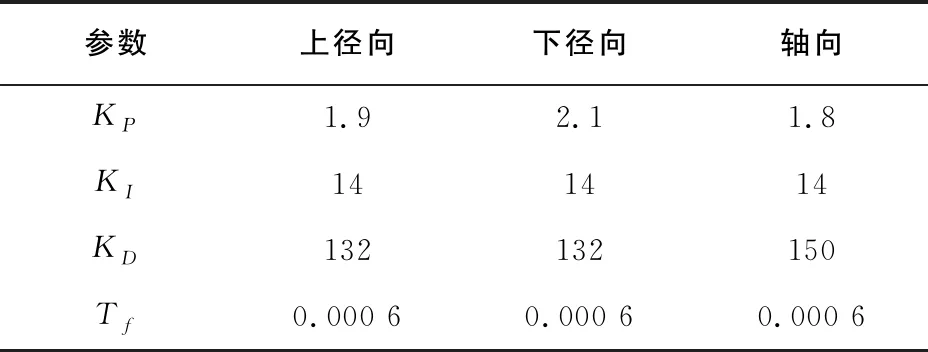
表4 兩種控制策略初始控制參數(shù)
變頻器驅(qū)動電機(jī)帶動飛輪轉(zhuǎn)子由靜止穩(wěn)定運行至額定轉(zhuǎn)速12 000r/min,借助數(shù)字采集卡及本實驗室開發(fā)的磁懸浮數(shù)據(jù)采集虛擬儀器,采集兩組試驗中上徑向各轉(zhuǎn)速下轉(zhuǎn)子振動情況,得到轉(zhuǎn)子的同頻振幅曲線,如圖14所示。
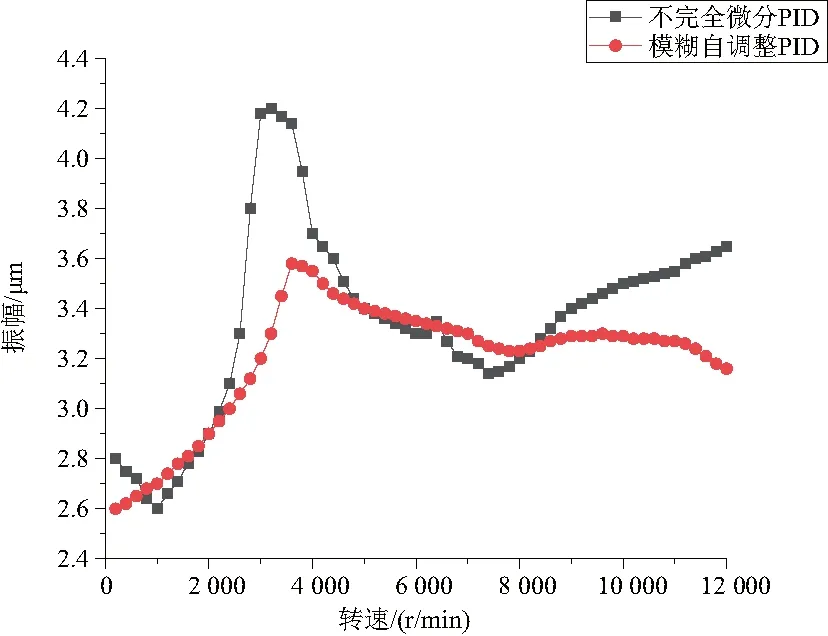
圖14 模糊自調(diào)整PID與PID同幅曲線對比
從圖14可以觀察到,在兩種控制策略下,飛輪轉(zhuǎn)子的臨界轉(zhuǎn)速在3 200r/min左右。在模糊自調(diào)整PID控制下,轉(zhuǎn)子振幅為3.6μm,相比較不完全微分PID控制,轉(zhuǎn)子振幅降低了16%,且變化平坦,有利于轉(zhuǎn)子安全越過臨界轉(zhuǎn)速;在工作轉(zhuǎn)速12 000r/min附近,模糊自調(diào)整PID控制策略轉(zhuǎn)子振幅為3.1μm,比不完全微分PID控制降低14%;在全轉(zhuǎn)速范圍內(nèi),模糊自調(diào)整PID控制振幅變化平坦。
5 結(jié)語
利用MATLAB模糊邏輯工具箱設(shè)計了模糊控制器,采用Simulink實現(xiàn)了模糊自調(diào)整PID控制策略仿真 ;利用FPGA芯片實現(xiàn)了數(shù)字模糊PID控制器。
在Quartus II平臺編寫了模糊控制算法,在飛輪電池試驗臺對該算法進(jìn)行驗證,并與不完全微分PID控制作比較。試驗結(jié)果表明,該控制算法能在線調(diào)整控制參數(shù),對轉(zhuǎn)子在臨界轉(zhuǎn)速的振動有較好的抑制作用,最大振幅為3.6μm;在額定工作轉(zhuǎn)速下轉(zhuǎn)子振幅為3.1μm;在飛輪轉(zhuǎn)子旋轉(zhuǎn)過程中振幅變化平坦,具有更好的動態(tài)性能。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
山東冶金(2019年3期)2019-07-10 00:54:04
中國生殖健康(2019年3期)2019-02-01 06:12:26
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
