運用動量分析老年人身體站立前傾時的動態平衡特征
2020-08-27 12:16:56張帆林榕蔣琴華王竹影吳志建宋彥李青
中國老年學雜志 2020年16期
張帆 林榕 蔣琴華 王竹影 吳志建 宋彥李青
(1南京森林警察學院特警學院,江蘇 南京 210023;2南京師范大學體育學博士后流動站;3空軍特色醫學中心第五研究室;4南京信息職業技術學院體育部)
跌倒作為影響老年人健康及獨立生活的重要危險因子,如何預防一直以來都是重要課題〔1〕,個體身體姿勢、肌力、關節活動度與平衡動作控制策略存在不同程度的差異〔2〕。以往相關研究〔3,4〕多利用身體質心(COM)晃動程度或是壓力中心(COP)軌跡的變化關系來評估平衡的穩定性,這會造成評量結果不一致或不具代表性。而針對COM與支撐面(BOS)的相關研究顯示〔5〕,利用COM速度或穩定極限(LOS)等相關參數以量化平衡,則能進一步探究影響平衡的內在機制。近年來有學者利用動量參數〔6〕研究執行不同動作時的平衡機制。按照動量定理,人類的動作均與動量有關,動量是一個活動物體維持動作的傾向,除非相反的力作用到物體上而改變它,因此作為引發日常生活功能性活動,亦是維持平衡穩定性的動量,可為個體提供動態能力來控制整個身體位置與動能〔7〕,使得COM在各種活動中能位移到BOS以外的位置,而跌倒恰恰較易發生在執行COM有較大位移的動作任務時,如頻繁涉及身體前傾的跨越、上下樓梯等。但目前利用動量探討年齡差異對動態平衡機制影響的研究仍處于空缺狀態,有必要詳加探討,幫助分析平衡系統在個體正常老化進程中的變化。鑒于此,擬運用動量定理,以存在跌倒風險且需姿勢控制能力的身體前傾動作為評估對象,探討老年人與年輕人在動態平衡能力方面的差異,以期為探究個體平衡維持機制、預防跌倒和發展應對措施提供科學參考。
1 對象與方法
1.1研究對象 研究對象分為老年組和年輕組,合計32人。16位老年人為老年組,平均年齡(68.9±3.7)歲,平均身高(165.2±3.6)cm,平均體重(61.2±4.9)kg,平均足長(23.9±1.8)cm;16位大學生為年輕組,平均年齡(20.3±2.5)歲,平均身高(167.3±4.8)cm,平均體重(60.2±4.7)kg,平均足長(24.0±3.4)cm。組內男女各8人。
1.2研究方法
1.2.1實驗篩查與控制 ①受試者無運動中樞控制障礙或神經系統病變,且過去半年內無下肢肌肉或骨骼的相關疾病與損傷;②受試者實驗前1 d未進行下肢劇烈運動,且前6個月未從事任何平衡方面的相關訓練;③老年受試者可獨立行動,不須任何輔具或拐杖協助行走;④使用Romberg測試篩檢老年受試者的平衡能力,以確保其基本平衡能力無明顯缺失;⑤實驗當天,受試者均無任何進行中的疾病,如感冒、發熱等;⑥受試者平均身高、體重和足長,組間分別控制在±3以內,組內分別控制在±5以內,以避免額外因素造成實驗誤差。
1.2.2實驗儀器與設備 ①英國產VICON(Oxford Metrics.UK)三維動作捕捉系統,包含5個高分辨率紅外線攝影機,可獲取人體動作時各關節光點的前后(X方向)、左右(Y方向)和上下(Z方向)方向的坐標原始資料。②美國產AMTI(AMTI Inc.USA)三維測力板一塊,可測量X方向、Y方向和Z方向方向的地面反作用力大小及相對應的力矩,其中,地面反作用力的測量單位為N,敏感度為1 N;力矩測量單位為N-m,敏感度為5 N-m。
1.2.3實驗方法與步驟 ①資料收集:運動學參數的收集利用VICON三維動作捕捉系統(頻率設定 120 Hz)拍攝,并獲取受試者身體前傾時各關節點 3D 原始坐標資料。反光球貼于受試者右側肩關節上的肩峰、肘關節上的肱骨外上髁、腕關節上的尺骨莖突、髖關節上的大轉子及踝關節上的外踝。動力學數據以AMTI 測力板收集受試者執行前傾動作時地面前后、左右及垂直方向的反作用力與COP值,取樣頻率為 600 Hz。②動作要求:受試者實驗前靜止站立于測力板上,聽到研究者口令:預備、1、2、3、開始,即開始前傾動作,在動作要求部分,要求受試者盡快向前傾斜至最大角度,且使軀干及下肢各關節成一直線,完成動作后,受試者需持續于最大角度處,直至聽到研究者“停止”口令再回復至原來靜止站立姿勢。若受試者跨步出去或是腳移開原站立點時,則算實驗失敗,失敗者則需多做1次實驗,自然站立與并腳站立情況各需收集有效10次實驗。而收集時間方面,受試者靜止站立時間約3 s,完成動作時間約1 s,持續于最大角度停頓,總計數據獲取時間為10 s。③實驗步驟:校正 VICON三維動作捕捉系統及 AMTI 三維測力板。向受試者說明實驗目的與流程,并填寫同意書。平衡測試分為功能性平衡測試及前傾動作平衡測試。其中,功能性平衡測試項目包括,張眼單腳站立、閉眼單腳站立、閉眼雙腳自然站立、張眼雙腳并攏、閉眼雙腳并攏。功能性平衡測試利用碼表記錄受試者平衡動作持續時間,以s為單位,若受試者能超過 60 s,則站立 60 s即停止;若每一情況下第1次站立時間未超過 60 s,則再測1次,2次測試記錄中取較佳成績進行統計分析。測量受試者身高、體重等基本資料,并在相應關節處粘貼反光球。在實驗前,使受試者充分了解動作的要求,并給予5次練習機會,每次實驗間給予受試者1 min的休息時間,而自然站立與并腳站立的實驗任務間,則給予10 min休息時間以避免疲勞。使受試者光腳站立于固定點上,雙手叉腰,使手的位置不擋到下肢的反光球位置,且不影響平衡反應。在實驗時,由實驗者隨機要求受試者完成以下2種實驗情況:雙腳自然站立使身體向前傾斜至最大角度,或雙腳并攏使身體向前傾斜至最大角度。為安全考慮,實驗前先在受試者腰部系上安全腰帶,研究者用手拉住腰帶,但為避免干擾受試者執行動作,只當受試者跨步后無法自行恢復平衡時,才協助恢復受試者平衡。
1.3實驗參數與處理
1.3.1參數定義 ①BOS:身體肢段在支撐表面所圍成的面積;②穩定極限:在支撐底面積周邊的界限即為穩定極限;③COM偏離度:在支撐底面積內,能主動移動COM的最大限度,以主動移動COM的最大距離除以足長的百分比;④COP:垂直地面反作用力的總作用所在位置,其大小代表接觸地面的所有應力的平均值。COP值的位置,0%在腳跟,而100%則是在腳尖;⑤安全限界:此為穩定極限的研究參數之一,其數值即由腳尖的位置(100%)減去動作結束時COP值,以反映動作時平衡能力的天花板效應。
1.3.2數據處理 使用Vicon Nexus1.4版軟件,進行運動學與動力學資料的同步與數字化處理,并利用 MATLAB R14 7.0版軟件自行撰寫的程序進行數據處理,將所獲取各關節的原始坐標資料,以4階巴特沃斯低通濾波進行平滑化處理,截止頻率為10 Hz。
修勻過后的運動學數據,則利用 Dempster提出的人體肢段參數〔8〕計算人體COM位置(公式1)、COM動作速度與實際向前傾斜角度等參數。其中,COM動作速度以COM位移被時間微分所得,單位為m/s;COM傾斜角度以測量COM與踝關節連接,動作前與動作結束兩者間的順時針夾角所得。
COM=0.578×COMHAT+0.056×COMupper-arm+0.044×COMforearm+0.322×COMleg.
(1)
COMHAT為頭、頸及軀干COM位置;COMupper-arm為上臂COM位置;COMforearm為前臂COM位置;COMleg為下肢COM位置。
修勻過后的動力學數據,計算動作開始與動作結束的COP值、COP偏離度。其中,COP偏離度,以足長進行標準化來降低個別差異。由動力學資料可得作用力及力矩值,COP值則為垂直地面反作用力的總作用所在位置,以 Y 軸上的COP值為例,其計算方式如公示(2)~(4)所示:
FZ×DY=MX,
(2)
DY=MX/FZ,
(3)
COPY=DYend-DYini/footlength×100%,
(4)
FZ為Z軸上反作用力值;MX為X軸上力矩值;DY為Y軸上COP位置;DYini為動作開始時Y 軸上COP位置;DYend為動作結束時Y軸上COP位置;footlength為Y軸上足長;而COPY為Y軸上COP值。
1.3.3動作分期 由運動學數據計算所得COM,利用其位移對時間微分所得的速度對時間作圖,定義動作起始點與動作完成點(圖1),當COM速度大于0 m/s 表示動作起始點;當速度首次降至負值之前為動作完成點。

圖1 動作起始點與動作完成點
1.3.4動量計算 假設身體前傾動作可簡化為倒立單擺模型,并假設人體肢段在動作過程中為剛體結構,兩側對稱,以便分析人體在前傾動作時水平方向線動量與角動量的差異。線動量與角動量的計算分別如下所示:COM線動量L=mV,其中m為COM質量,v為COM速度。COM角動量H=Iw,其中,I為轉動慣量,ω為角速度。由于本研究以倒立單擺模型來簡化人體動作的結構,因而其轉動慣量如公式(5)所示〔9〕,r為COM對踝關節的距離;l為身高。
(5)
2 結 果
2.1功能性平衡與不同BOS下相關LOS
2.1.1功能性平衡 老年組與年輕組的功能性平衡測試最高測量至60 s,老年組不論張眼或閉眼,單腳站立均無法達到60 s;而年輕組只在閉眼單腳站立時無法達到60 s,且老年組與年輕組在單腳站立部分具顯著差異(P<0.05)。見表1。

表1 兩組功能性平衡測試
2.1.2COP的LOS 不同BOS下的前傾動作,兩組COP的LOS結果組內差異無統計學意義,但組間均具有顯著差異(P<0.05)。見表2。
2.1.3COM的相關LOS 不同BOS下的前傾動作,兩組COM的LOS組內差異無統計學意義,但組間均具有顯著差異(P<0.05)。見表2。

表2 兩組身體前傾動作時COP、COM的
2.2不同BOS下的COM線動量 老年組與年輕組在不同BOS下,執行前傾動作時COM線動量結果見表3。各參數組內差異無統計學意義,組間具有顯著差異(P<0.05)。圖2為兩組受試者前傾動作時線動量-時間關系。

表3 兩組不同BOS下前傾動作的COM線動量
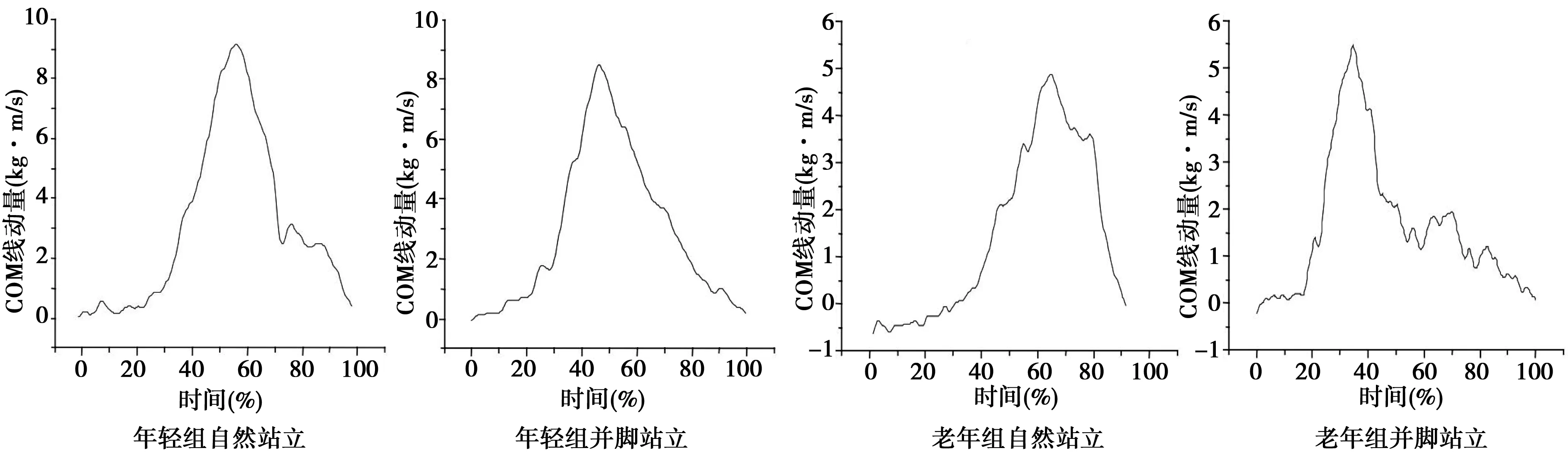
圖2 COM線動量與時間關系
2.3不同BOS下的COM角動量 老年組與年輕組在不同BOS下,前傾動作時COM角動量結果見表4。各參數組內差異無統計學意義,角動量在組間具有顯著差異(P<0.05),而最大角動量時間點則在組間無顯著差異。圖3為兩組受試者執行前傾動作時角動量-時間關系。

圖3 COM角動量與時間關系
表4 兩組不同BOS下前傾動作的COM角動量
2.4LOS參數與COM線動量、角動量相關性 結果顯示,線動量與角動量顯著相關,且與COP偏離度、COM偏離度、傾斜角等參數呈正相關,而與安全限界呈負相關。見表5。

表5 LOS參數與COM動量的相關矩陣(r值)
2.5執行前傾動作時不同BOS下的COM線動量及角動量信度 根據Fleiss分類〔10〕,若ICC值大于0.75,則其具有較好信度,若小于0.45則為不良信度,而介于0.45~0.75,則視為中等信度。結果顯示,無論在自然站立或并腳站立時,COM線動量的ICC值皆大于0.75,而COM角動量除了在自然站立時不同測試者間ICC值較低外,其余ICC值均大于0.75,顯示具有較好的再測信度。而自然站立時COM角動量的ICC值為0.631 6,亦具中等再測信度。見表6。

表6 同一測試者同日再測信度與不同測試者間信度
3 討 論
3.1COM線動量與前傾動作動態平衡關系 盡管運用動量研究個體平衡控制機制的可行性已得到證實,但不同年齡個體之間動量值是否存在差異未有共識,Reisman等〔11〕研究顯示年輕人從坐到站的水平動量為20~30 kg·m/s,垂直動量為 30~60 kg·m/s,其量值受動作速度影響。事實上,以COM線動量量值探討前傾動作LOS方面的研究較少,就實驗結果而言,證實不同BOS下老年人與年輕人身體前傾時的線動量顯著不同,支持Kaya等〔12〕的研究,不支持Jensen等〔13〕的研究,該研究認為在執行不穩定動作時,老年人與年輕人的COM或各肢段的水平動量并無差異(水平線動量標準化值,老年人1.0 kg·m/s,年輕人0.8 kg·m/s)。至于本研究中老年人線動量量值為3.3~3.7 kg·m/s,而年輕人的線動量量值為7.2~7.4 kg·m/s,且老年人與年輕人具顯著差異。推究量值大小不同的原因,可能為本研究前傾動作的動態LOS要求較坐到站任務難度高。
本實驗結果證實老年人與年輕人前傾動作時,最大線動量發生時間點在不同BOS顯著不同。關于老年人的COM線動量最大值發生時間占動作時間百分比的相關研究中,并無直接實驗數據可參考。而年輕人線動量最大值發生時間占動作時間百分比的相關研究中〔11〕,執行坐到站任務的水平線動量最大值發生時間點約在30%,而垂直線動量最大值發生時間點則在50%~60%。Commissaris等〔14〕在研究舉物動作時,發現線動量最大值發生于動作開始后300~400 ms之間。就本研究結果而言,老年人線動量最大值約在動作周期63%左右,而年輕人則發生在動作周期52%~55%,支持上述研究。Pai等〔15〕研究坐到站發現,動量轉折點與平衡控制極度相關,而本研究最大線動量發生時間點亦證實老年人與年輕人顯著不同,因為年輕組最大線動量發生時間點較老年組早。
綜上,運用COM線動量發現老年人與年輕人在不同BOS下前傾動作的動態平衡能力存在顯著差異,說明老年人平衡能力存在顯著退化的情形,支持Scarborough等〔16〕研究,說明老年人下肢肌力與線動量有顯著相關,可能是因為動作的平衡目標并非在于維持COM穩定,而在于維持水平面動量穩定。由于線動量變化量為作用力與時間的積分,因此,COM線動量可作為測量平衡能力的參考指標〔17,18〕。本實驗結果亦證實,老年執行前傾動作時COM線動量顯著小于年輕人,顯示其控制動態平衡能力下降,而最大線動量時間點顯著大于年輕組,顯示其推進沖量與制動沖量間的轉移較差。
3.2COM角動量與前傾動作動態平衡關系 本實驗結果證實在不同BOS下,老年人與年輕人身體前傾時動態LOS平衡能力上,COM角動量存在顯著差異,支持Sheehan等〔19〕的研究。盡管角動量應用于平衡機制中前傾動作LOS的研究較少,但類似動作任務的研究中亦得到部分支持。至于老年人部分,有研究認為〔11〕老年人坐到站經標準化后的軀干角動量為0.01~0.11 kg·m2/s·rad/s,行走時軀干角動量為0.12~0.19 kg·m2/s·rad/s;年輕人坐到站的角動量-22~2 kg·m2/s·rad/s。而本研究所得的老年人COM角動量值為3.8~4 kg·m2/s·rad/s,年輕人則為6.4 kg·m2/s·rad/s,說明老年組與年輕組具顯著差異。而最大COM角動量發生時間點方面,Commissaris等〔20〕的舉物研究顯示COM角動量最大值發生于動作開始后350 ms,盡管與本研究執行前傾動作任務不同,但結果一致的是,皆未能證實在不同BOS下老年人與年輕人有顯著不同。COM角動量最大值發生時間占動作時間百分比的相關研究中〔11〕,年輕人執行坐到站任務時在70%左右。就本實驗結果而言,最大COM角動量發生時間點雖未證實老年人與年輕人存在顯著不同,但其中具有年輕組較老年組早的傾向。
綜上,運用COM角動量研究可發現老年人平衡能力上顯著退化,因為預期姿勢調整主要以產生足夠的角動量以有效執行平衡任務,推論髖關節伸展肌力與軀干角動量呈顯著正相關,肌力較好者具有較高角動量,而較無力者則具較小角動量且采取較保守動作,支持Herr等〔21〕的研究。由于關節力矩亦可提供有效定義踝關節與髖關節策略的差異〔22,23〕,同時,在調整前傾動作的不穩定情況時,可利用踝關節策略維持平衡,提升最大踝關節力矩及踝關節力矩產生速率。基于物理學觀點,角動量為力矩與作用時間的積分所得,本研究的前傾動作,屬模擬人體倒立單擺形式,以踝關節為支點作旋轉動作,因而利用COM角動量分析其平衡能力較具代表性,而實驗結果顯示,老年人前傾動作時,COM角動量顯著低于年輕人,可能是老年人骨骼肌肉系統所能發揮的力矩顯著下降所致。
3.3BOS與前傾動作動態LOS關系 盡管動態穩定性是人體COM與BOS間的關系問題已得到證實,但傳統研究多以BOS小者,其LOS即較小為前提來評價平衡能力優劣〔24〕,多認為BOS大者平衡的挑戰較小,不過也有研究〔11〕認為平衡與BOS大小無關。事實上,單純人體COM位置和BOS間的關系已無法說明運動中的人體穩定性大小,還需要考慮COM水平速度〔25〕,因為人體COM位置和速度的綜合效應才是維持個體動態穩定性的核心要素。鑒于此,為了提升預測跌倒概率,有研究〔26〕以COM開始位置與速度及擾動的相對時間來仿真最佳動態LOS。
就本實驗結果而言,無論是老年組或是年輕組,在執行前傾動作時LOS參數中,COP偏離度、安全限界、COM偏離度、傾斜角度及動作開始前的COP值等,均顯示不因BOS改變而有顯著不同,COM線動量及角動量亦無此傾向,支持平衡與BOS大小無關的觀點。究其原因,可能是動態平衡的目標不在于使COM穩定,而在使COM動量穩定,這就意味著與動作COM的位置、速度有關,而非BOS大小。Lee等〔27〕研究發現舉物高度與腳,相較于功能性BOS的后側位置有關,本研究動作本質非向上而是往前傾,但由COP偏離度及其動作起始時COP值的關系看來,COP值靠后者,其COP偏離度較大,與Lee等〔27〕研究結果不同。
此外,BOS對平衡的影響可能主要在于冠狀面上,根據相關研究〔28,29〕,BOS大小會影響踝關節策略應用以致不利于平衡控制〔30,31〕,因為BOS對平衡的效應,在于身體側向動作上,而非前后方向動作,推論踝關節策略在正常BOS時調整矢狀面站立平衡〔32〕,而當BOS變窄時,調整平衡的策略則由髖關節負責,以調整冠狀面的站立平衡為主〔33〕。本實驗結果證實此推論,在利用前后方向動作參數檢驗BOS對平衡的影響方面,未發現有顯著差異。
3.4COM動量參數與COP、COM的LOS參數相關度 利用COM動量分析前傾動作的平衡有其代表性,一般平衡研究多利用測力板或動作分析儀了解COP或COM的軌跡變化,并用以計算各類參數量化平衡能力。依據實驗結果,COM線動量與角動量、COP的LOS參數及COM的LOS等參數具顯著相關,且不論是COP偏離度、安全限界、COM偏離度、COM傾斜角度及動作開始前的COP值等,均顯示老年組與年輕組具顯著差異。相關研究也認為COM動量參數與平衡控制相關性高〔34〕,因此,利用COM線動量可詳細比較平衡時的COM動態控制能力,至于最大COM線動量時間點,亦可分析平衡時推進沖量與制動沖量的轉折。其相關性高的原因,利用物理學定義可發現,線動量大者,其角動量亦高;角動量的公式中I=mr2,其中r即為速度v,因而角動量可改寫為mrv,與線動量mv具線性相關。而線動量與COP偏離度、COM偏離度及傾斜角呈顯著正相關,可能原因為線動量屬驅動COM移動的物理量,表現在COM移動的軌跡參數上〔35〕。Jadelis等〔3〕研究發現,將后傾時COP偏離度作為評價老年人動態平衡能力的指標,其膝關節肌力僅可解釋18.4%的動態平衡能力,而體重指數(BMI)、性別、足長及膝蓋疼痛的情況等,僅可再解釋另外的6.7%,顯示仍有絕大多數動態平衡能力尚無法由肌力及一般參數所解釋。近年來研究COM動態平衡的LOS,主要以兩種形式為參數,分別為力矩界限與狀態界限,Patton等〔4〕提出力矩界限與狀態界限高度相關,并認為中樞神經系統以狀態界限作為控制平衡回饋的重要參數。本研究以狀態界限為安全限界參數的計算,結果顯示老年人與年輕人顯著不同;而COM線動量與安全限界呈負相關,顯示在動態平衡能力上,個體的平衡LOS的限制越大,驅動COM的能力越小;可由此分析動態平衡能力退化程度,因而COM動量參數可作為評價老年人動態平衡能力的良好參數。
COM動量與LOS參數極度相關,證實動量分析動態平衡能力具有代表性,加之關節力矩可提供有效定義踝關節與髖關節策略〔23〕,將來可以此重新定位受試者動作,進一步研究老年人髖關節與膝關節退化情形。同時,未來亦可針對COM動量分析諸如行走、跑步、跳躍等基本動作的平衡能力及長期運動老年人的平衡能力是否顯著退化。
綜上,本研究得出以下結論與建議。結論:①老年人與年輕人在前傾動作的動態穩定極限平衡能力上,COM線動量和角動量皆存在顯著差異。②COM線動量及角動量,與COP及COM穩定極限參數之間呈顯著相關。③運用COM線動量及角動量參數,可作為分析和預測老年人動態平衡能力的有效路徑。建議:①給予老年人平衡運動處方時,除訓練肢體活動能力及肌耐力外,亦需考慮訓練其動態平衡能力中質心動量顯著不同的情形。②促進老年人動態平衡提升,應以增加其在不同質心位置控制質心速度的能力為優先考慮,如太極拳、柔力球及瑜伽等,均是訓練質心動態穩定極限的動作類型,對老年人平衡訓練具相當效益。
猜你喜歡
保健醫苑(2022年1期)2022-08-30 08:40:44
保健醫苑(2022年6期)2022-07-08 01:25:16
音樂探索(2022年2期)2022-05-30 21:01:37
保健醫苑(2022年4期)2022-05-05 06:11:20
小天使·一年級語數英綜合(2019年8期)2019-08-27 02:23:00
小學科學(學生版)(2018年7期)2018-08-13 09:33:04
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
海峽姐妹(2018年1期)2018-04-12 06:44:24
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41