基于重量平衡的貨運(yùn)動(dòng)車組貨物裝載方案研究
2020-08-31 12:29:32苑豐彪楊翠芝梁永廷康洪軍
鐵道貨運(yùn) 2020年8期
關(guān)鍵詞:轉(zhuǎn)向架
苑豐彪,楊翠芝,梁永廷,康洪軍,張 莉
(1.中車唐山機(jī)車車輛有限公司 產(chǎn)品研發(fā)中心,河北 唐山 063030;2.中車唐山機(jī)車車輛有限公司 科技管理部,河北 唐山 063030)
隨著我國國民經(jīng)濟(jì)水平的不斷提高,高速貨運(yùn)將成為鐵路貨運(yùn)市場(chǎng)發(fā)展的重要方向。貨運(yùn)動(dòng)車組裝載貨物主要以小批量、高附加值、時(shí)效性要求較高的貨品為主,通常為散件形式包裝后運(yùn)輸[1],容易出現(xiàn)偏載現(xiàn)象,因而貨運(yùn)動(dòng)車組貨物裝載方案對(duì)列車行車安全有直接影響。目前,普通貨車運(yùn)輸沿線設(shè)置超偏載檢測(cè)裝置對(duì)貨車的超偏載情況進(jìn)行檢測(cè)[2],超偏載檢測(cè)裝置一般安裝在車站信號(hào)機(jī)附近,當(dāng)貨車通過時(shí)自動(dòng)檢測(cè)超偏載狀態(tài)并將信息儲(chǔ)存?zhèn)鬟f[3]。貨運(yùn)動(dòng)車組一般在高速鐵路運(yùn)行,線路無超偏載檢測(cè)裝置[4],需要對(duì)貨運(yùn)動(dòng)車組進(jìn)行重量平衡分析,采取必要的控制方法確保貨運(yùn)動(dòng)車組貨物裝載方案合理,以保障貨運(yùn)動(dòng)車組行車安全。
1 重量平衡分析
將重量平衡定義為軸重、軸重差、輪重差3個(gè)指標(biāo)的最佳狀態(tài)。軸重、軸重差、輪重差3個(gè)指標(biāo)對(duì)動(dòng)車組的性能及安全影響較大[5],為保證貨運(yùn)動(dòng)車組裝載后的重量平衡,將車輛整體和裝載貨物的集裝器作為研究對(duì)象,推導(dǎo)與重量平衡相關(guān)參數(shù)的計(jì)算公式,以便對(duì)貨運(yùn)動(dòng)車組重量平衡進(jìn)行分析。
所有部件的重心都以車體中心為坐標(biāo)原點(diǎn);沿車體縱向方向?yàn)閤軸,從坐標(biāo)原點(diǎn)指向二位端為正方向;沿車體橫向方向?yàn)閥軸,從一位端向二位端看左手側(cè)為正方向。貨運(yùn)動(dòng)車組坐標(biāo)系如圖1所示。
車輛裝載后重量為車輛自身重量與集裝器重量之和,可以表示為

圖1?貨運(yùn)動(dòng)車組坐標(biāo)系Fig.1 Freight EMU coordinate systems

式中:Gw為車輛裝載后重量,t;GC為車輛自身重量,t;Gi為第i個(gè)集裝器重量,t;n為集裝器個(gè)數(shù)。
車輛裝載后的重心坐標(biāo)可以表示為

式中:Xs,Ys分別為車輛裝載后的重心橫坐標(biāo)、縱坐標(biāo),mm;XC,YC分別為車輛自身的重心橫坐標(biāo)、縱坐標(biāo),mm;Xi,Yi分別為第i個(gè)集裝器重心在車輛上的橫坐標(biāo)、縱坐標(biāo),mm。
依據(jù)力及力矩平衡,可得到
式中:Gw1為一位端轉(zhuǎn)向架處的重量分力,N;Gw2為二位端轉(zhuǎn)向架處的重量分力,N;F1為一位端軌道支承力,N;F2為二位端軌道支承力,N;XF為軌道支承力作用點(diǎn)與y軸的距離,mm。
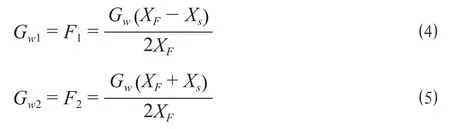
由于轉(zhuǎn)向架結(jié)構(gòu)的對(duì)稱性,按照理想狀態(tài),同一端轉(zhuǎn)向架2個(gè)軸承重相同,同一端轉(zhuǎn)向架每側(cè)2個(gè)車輪承重相同,因而每個(gè)輪重為某端每側(cè)軌道支承力的1/2,每個(gè)車輪承重的計(jì)算公式為

式中:F11為一位端一位側(cè)軌道支承力,N;F12為一位端二位側(cè)軌道支承力,N;F21為二位端一位側(cè)軌道支承力,N;F22為二位端二位側(cè)軌道支承力,N;YF為軌道支承力作用點(diǎn)與x軸的距離,mm。
車輛一位端軸重可以表示為

式中:Gz1為車輛一位端軸重,t。
車輛二位端軸重可以表示為

式中:Gz2為車輛二位端軸重,t。
輪重差、軸重差計(jì)算公式為

式中:Ar1左(右)為一位端左、右側(cè)輪重差;Ar2左(右)為二位端左、右側(cè)輪重差;Am1(2)為一、二位端軸重差。
2 基于重量平衡的貨運(yùn)動(dòng)車組貨物裝載模型構(gòu)建
2.1 車輛裝載約束條件
參照總體技術(shù)條件及相關(guān)標(biāo)準(zhǔn),軸重、輪重差、軸重差指標(biāo)參數(shù)有以下限定[6]:①在額定載荷狀態(tài)下每軸上的重量不得大于17 t;②任一側(cè)各車輪輪重之和與該車輛兩側(cè)輪重和的平均值之差不得超過±4%;③每軸軸重與平均軸重之差不得超過平均軸重的±2%。
根據(jù)貨運(yùn)動(dòng)車組的總體布置,集裝器裝載約束條件如下:①車輛每側(cè)中間開裝載門,集裝器由裝載門進(jìn)入向兩端推動(dòng)裝載;②使用標(biāo)準(zhǔn)集裝器,車輛寬度方向上可并排布置2個(gè)標(biāo)準(zhǔn)集裝器,每輛車貨倉區(qū)最多可裝載40個(gè)標(biāo)準(zhǔn)集裝器。
2.2 集裝器重量及重心測(cè)定
軸重差、輪重差與車輛裝載后的重量及重心密切相關(guān),貨運(yùn)動(dòng)車組設(shè)計(jì)時(shí)已經(jīng)對(duì)車輛的重量及重心進(jìn)行了規(guī)劃與管理,車輛自身的重量、重心參數(shù)已經(jīng)固定,但運(yùn)載貨物的差異性及裝載流程的不同將對(duì)車輛的重量平衡產(chǎn)生較大影響。
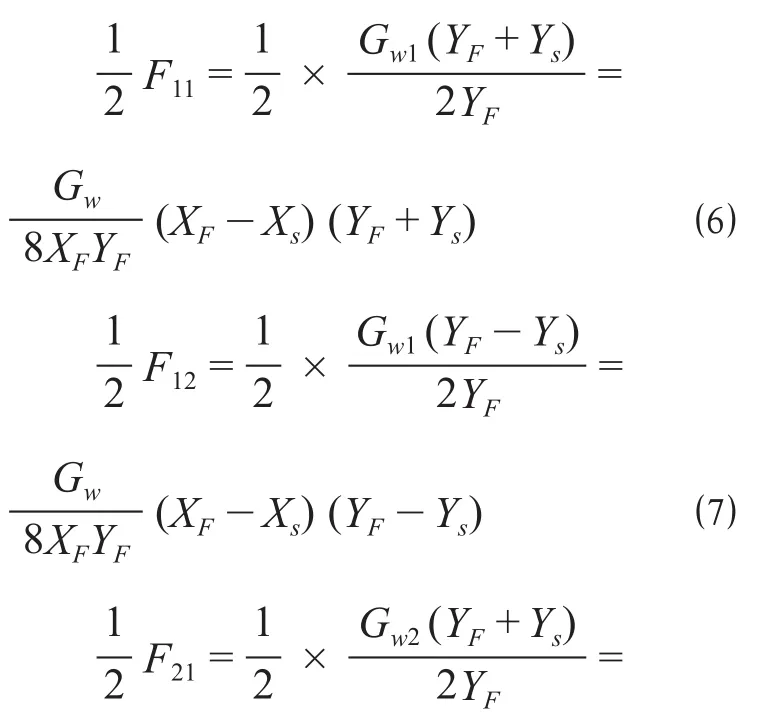
裝載前需要對(duì)集裝器的重量、重心進(jìn)行測(cè)量,常用的重心測(cè)量方法為四角支撐測(cè)量法[7]。集裝器重量、重心測(cè)量平臺(tái)如圖2所示,四角設(shè)置測(cè)重傳感器,兩邊設(shè)置測(cè)距傳感器,以集裝器中心為坐標(biāo)原點(diǎn)定義坐標(biāo)系。
重量、重心計(jì)算公式為

式中:Gi為第i個(gè)集裝器重量,t;Cix為第i個(gè)集裝器x方向的重心,mm;Ciy為第i個(gè)集裝器y方向的重心,mm;Lx1,Lx2,Ly1,Ly2為測(cè)重傳感器的橫、縱坐標(biāo),mm;Gi1,Gi2,Gi3,Gi4為測(cè)重傳感器四角重量,t。
圖2?集裝器重量、重心測(cè)量平臺(tái)Fig.2 Weight and center of gravity measuring platform for unit load devices
2.3 基于重量平衡的貨運(yùn)動(dòng)車組貨物裝載模型構(gòu)建
以輪重差、軸重差之和最小為目標(biāo),由于車輛結(jié)構(gòu)的對(duì)稱性,左側(cè)輪重差與右側(cè)輪重差優(yōu)化目標(biāo)等價(jià),一位端軸重差與二位端軸重差優(yōu)化目標(biāo)等價(jià),因而取左側(cè)輪重差絕對(duì)值與一位端軸重差絕對(duì)值之和作為目標(biāo)函數(shù),結(jié)合公式 ⑴ 至公式 ⒁,構(gòu)建基于重量平衡的貨運(yùn)動(dòng)車組貨物裝載模型如下。

公式 ⒅ 表示以車輛輪重差、軸重差之和最小為目標(biāo)的優(yōu)化裝載模型;公式 ⒆ 表示輪重差約束,即任一側(cè)各車輪輪重之和與該車輛兩側(cè)輪重和的平均值之差不得超過±4%;公式 ⒇ 表示軸重差約束,即每軸軸重與平均軸重之差不得超過平均軸重的±2%。
3 基于重量平衡的貨運(yùn)動(dòng)車組貨物裝載方案
3.1 貨物裝載方法
根據(jù)每個(gè)集裝器的重量、重心,經(jīng)過優(yōu)化計(jì)算,合理確定裝載順序。裝箱問題一般由2類規(guī)則組成,第一類為定序規(guī)則,用來確定箱體放入布局空間的先后順序;第二類為定位規(guī)則,用來確定每一個(gè)箱體在布局空間碼放的位置[8]。由于貨運(yùn)動(dòng)車組的集裝器不存在空間碼放,只需確定定序規(guī)則,即可確定集裝器在車上的固定位置。
將同批次集裝器按照重量及重心分布進(jìn)行分類,考慮到貨地點(diǎn)及裝載重量平衡的要求,對(duì)集裝器進(jìn)行篩選,生成優(yōu)化裝載流程。篩選集裝器時(shí),采用以下原則:①將擬裝于同一列貨運(yùn)動(dòng)車組的集裝器進(jìn)行分類,到達(dá)同一目的地的集裝器分配到同一車廂;②為保證輪重偏差不超標(biāo),采用“對(duì)稱原則”篩選,首先選定一個(gè)集裝器后,根據(jù)其重心偏移量再篩選出一個(gè)與其偏移量相對(duì)稱的集裝器,組成“集裝器對(duì)”,篩選時(shí)可通過旋轉(zhuǎn)集裝器來達(dá)到重心偏移量對(duì)稱,以此類推,將所有集裝器全部成對(duì);③為了保證軸重偏差不超標(biāo),采用“相似原則”進(jìn)行篩選,即選定一個(gè)“集裝器對(duì)”,再選擇與其重量指標(biāo)盡可能相近的“集裝器對(duì)”與其配對(duì),將配好對(duì)的“集裝器對(duì)”放置車廂的對(duì)稱位置。貨運(yùn)動(dòng)車組裝載布置如圖3所示。
3.2 裝載流程

圖3?貨運(yùn)動(dòng)車組裝載布置Fig.3 Loading layout of freight EMU
裝載問題是離散組合最優(yōu)化問題,目前優(yōu)化算法主要有啟發(fā)式算法和遺傳算法。由于集裝器本身的形狀特征固定,自由度少,復(fù)雜度很低,容易生成編碼序列,宜采用簡化遺傳算法生成裝載順序[9]。根據(jù)集裝器裝載的定序規(guī)則和裝載模型,基于簡化遺傳算法結(jié)合Java編程語言編制裝載軟件,輸入各集裝器的數(shù)據(jù),首先產(chǎn)生一個(gè)初始裝載流程,然后按照適者生存、優(yōu)勝劣汰的原理,計(jì)算各裝載流程對(duì)裝載模型的適應(yīng)度,逐代演化生成出越來越優(yōu)的裝載流程,從而獲得最佳裝載方案。裝載流程算法步驟如圖4所示。

圖4?裝載流程算法步驟Fig.4 Steps of loading process calculation
3.3 裝載仿真測(cè)試
以新研制的某型貨運(yùn)動(dòng)車組為例,車輛參數(shù)如下:GC= 50 t,XF= 9 000 mm,YF= 750 mm,XC=-22.6 mm,YC= -6 mm。由于沒有足夠集裝器進(jìn)行實(shí)際檢測(cè),采用自動(dòng)生成的模擬數(shù)據(jù)。為了不失一般性,在裝載仿真測(cè)試中所用集裝器重量均在200 ~ 420 kg范圍內(nèi),重心偏差隨機(jī)生成。通過軟件計(jì)算生成優(yōu)化裝箱流程,輸出界面包括裝箱流程圖及載重、軸重、輪重、軸重差、輪重差等信息,裝載流程界面如圖5所示。
通過仿真測(cè)試可知,優(yōu)化后的裝載流程的最大輪重差僅為0.01%,最大軸重差僅為0.01%,滿足貨運(yùn)動(dòng)車組裝載的總體技術(shù)條件及相關(guān)標(biāo)準(zhǔn)要求。

圖5?裝載流程界面Fig.5 Loading process interface
4 結(jié)束語
貨運(yùn)動(dòng)車組的裝載重量平衡是列車行車安全的重要保障,貨運(yùn)動(dòng)車組貨物裝載方案對(duì)列車行車安全有重要影響。基于重量平衡的貨運(yùn)動(dòng)車組貨物裝載方案,以“對(duì)稱原則”和“相似原則”為基礎(chǔ),基于簡化遺傳算法優(yōu)化裝載流程,保證了貨物裝載方案的可行性,并通過模擬仿真驗(yàn)證了裝載方案的有效性和優(yōu)越性,可以滿足貨運(yùn)動(dòng)車組貨物裝載要求,為貨運(yùn)動(dòng)車組貨物的合理裝載提供了理論依據(jù)。今后,應(yīng)進(jìn)一步研究將貨物裝載方案與射頻識(shí)別技術(shù)(RFID)及無線定位技術(shù)(UWB)相結(jié)合,以實(shí)現(xiàn)貨物全運(yùn)輸鏈的識(shí)別、跟蹤、定位,為鐵路重要物資運(yùn)輸?shù)闹悄芑峁└鼉?yōu)的解決方案。
猜你喜歡
湖南大學(xué)學(xué)報(bào)·自然科學(xué)版(2025年6期)2025-07-16 00:00:00
裝備制造技術(shù)(2021年5期)2021-08-14 01:44:56
裝備制造技術(shù)(2021年2期)2021-07-21 05:38:24
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
制造技術(shù)與機(jī)床(2019年12期)2020-01-06 03:17:46
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年18期)2019-01-23 07:17:20
西南交通大學(xué)學(xué)報(bào)(2018年5期)2018-11-08 10:58:26
現(xiàn)代城市軌道交通(2018年5期)2018-05-28 02:19:35
現(xiàn)代工業(yè)經(jīng)濟(jì)和信息化(2016年1期)2016-05-17 05:33:38
鐵道運(yùn)營技術(shù)(2015年3期)2015-12-23 09:27:14