基于Arduino單片機的智能快遞小車設計
2020-09-10 21:23:47付琳
內燃機與配件 2020年17期
關鍵詞:機械臂
付琳
摘要:本文介紹了一種基于Arduino單片機的智能快遞小車的設計方案。這種小車具有自動循跡、自主避障且制作成本低廉的特點,可實現快遞的智能運輸和投取。小車采用了超聲波傳感器與紅外線傳感器相結合實現避障功能,借助黑標傳感器來進行路面循跡,將機械臂與顏色傳感器相結合,實現對快遞的智能識別及收取。經過多次路面模擬實驗,證明了該設計方案在智能投取、運輸快遞上具有非常出色的效果。
關鍵詞:避障;循跡;機械臂;智能快遞投取
0? 引言
隨著信息技術等一批戰略性新興產業的興起,智能小車已成為智能信息領域的熱門研究對象。智能小車集道路感知、規劃以及行為控制和執行等多個功能于一體,可實現機械結構的自我引導移動,是一種綜合智能系統[1]。智能小車由于其成本低廉及實用性高的特點,是現代運輸問題、科學探測的極佳解決方案。國內許多學者也對智能小車進行了相關研究,如陳杰等人的多樣信息采集智能小車的設計[2];周磊磊等人的基于STM32的模擬工業自動化智能搬運小車設計[3];白歡等人的智能小車無線控制系統的設計與優化[4],都對智能小車的發展提供了寶貴的經驗。
智能小車包括傳感器、控制器、執行器三個部分。傳感器部分用于接收外界信息,例如路障、光線等,可以看作我們的眼睛、耳朵、皮膚等感知器官;控制器部分用于接收傳感器傳遞的信號并根據事先規定好的工作方式(編寫好的程序)進行決策且繼續傳遞給執行器;執行器顧名思義就是最終的執行者,其作用就是執行控制器傳遞的指令,例如輪胎、機械臂都是屬于執行器[5]。本文介紹了一種智能投取快遞小車的設計,采用Arduino單片機作為主控單元,包括循跡模塊、避障模塊、抓取模塊、返航模塊,下文將分模塊介紹智能快遞小車的設計實現。
1? 系統模塊的設計
智能投取快遞小車采用直流電機作為執行元件,小車的Arduino主控單元發出PWM調制信號,分別控制車載直流電機的轉速以實現小車的轉向。以前驅小車為例,電機A控制左前輪,連接的是Arduino主控單元的IN1、IN2端口;電機B控制右前輪,連接的是Arduino主控單元的IN3、IN4端口。要實現小車右轉只需要將右前輪前向驅動而左前輪不動或者左前輪后向驅動而右前輪前向驅動,即給IN1、IN2、IN4端口輸入0、IN3輸入1或者給IN1、IN4輸入0、IN2、IN3輸入1。上述兩種方式都能實現小車右轉,區別在于前者轉速比較慢,后者反應比較快。
1.1 循跡模塊設計
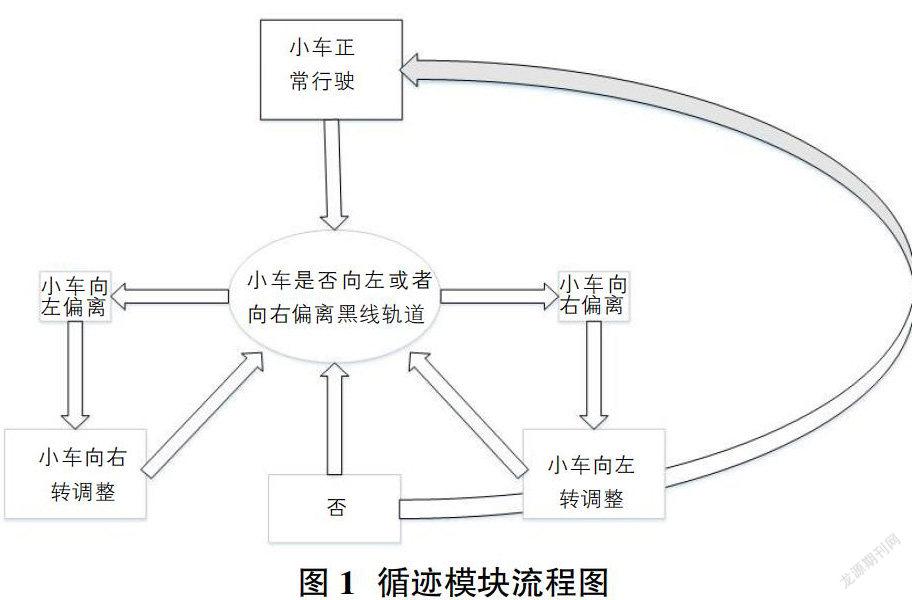
由于黑線和白色地板對光反射系數的不同,采用黑標傳感器來識別白色地板上的黑線,Arduino主控單元根據黑標傳感器接收的數據判斷黑線的位置,實現小車路線的動態規劃,從而實現智能循跡。小車根據多個黑標傳感器的數據接收判斷左右走向,無論是S型彎道亦或者是直角彎道,小車都成功穿過,成功完成循跡行駛。循跡模塊流程圖由圖1所示。
1.2 避障模塊設計
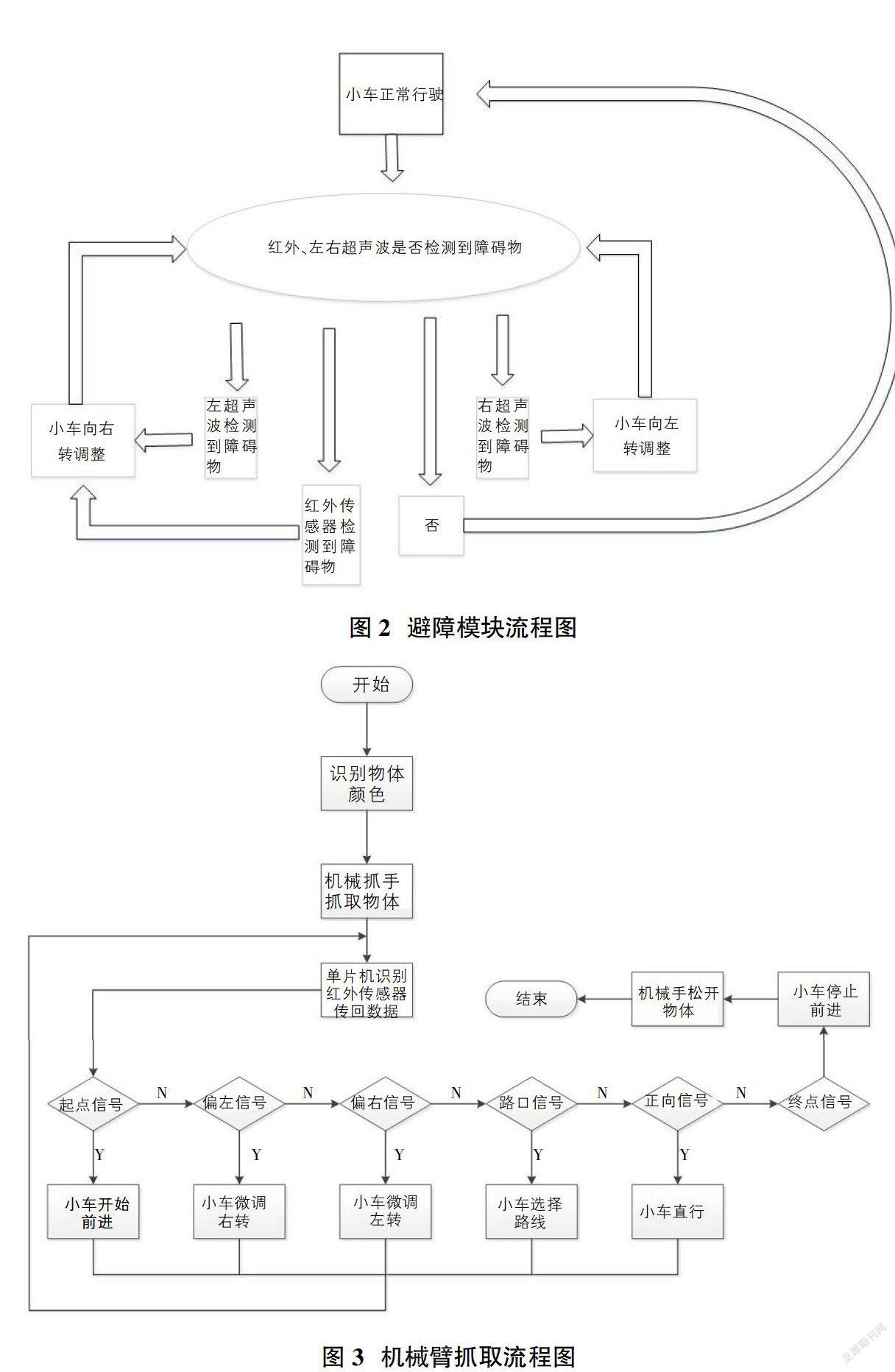
智能投取快遞小車的避障模塊硬件由左右超聲波傳感器和紅外傳感器構成,實現小車對障礙物的全方位有效避障[6]。具體避障流程圖如圖2所示。
避障系統采用紅外、超聲波結合的模式,小車車頭中央集成一個紅外避障傳感器,用于探測道路前方障礙物,小車兩側集成左右兩個超聲波傳感器,用于分別探測小車左右兩側的障礙物,實現了小車行進過程中的全方位避障。Arduino主控單元通過超聲波或者紅外避障傳感器反饋的信號判斷障礙物是否存在及大概位置,控制直流電機做出避障應答,從而實現安全行駛。
1.3 機械臂模塊設計
機械臂是實現抓取功能的核心。智能投取快遞小車采用五自由度的機械臂來實現不同情況下的快遞抓取,根據路況、物料大小、物料的不同位置進行自主抓取和搬運物件。機械臂硬件結構由五個舵機組成,可實現縱軸和橫軸兩相互垂直方向的直線運動和一個同平面內的擺動運動,機械臂的底部舵機、中間舵機和機械爪舵機分別連接到開發板的舵機口[7]。
機械臂舵機與小車的控制板直接相連,以實現Arduino主控單元對機械臂的實時控制。機械臂采用程序化自主控制,為靈活應用的智能搬運需求,也可在藍牙和無線WI-FI的輔助控制下通過手機APP人工控制實現機械臂的精確抓取工作。當智能小車到達預定位置時,主控單元通過調節舵機角度來控制機械臂的旋轉和手爪的開合,根據傳感器的反饋進行調整,實現投取快遞小車對快遞物品的精準抓取[8]。
智能小車采用顏色傳感器對快遞進行抓取分類。到達指定位置后,顏色傳感器采集物料顏色特征并傳輸給Arduino主控單元,Arduino主控單元驅動舵機使機械臂做出抓取動作,超聲波傳感器監測小車前方障礙物距離,Arduino主控單元對反饋數據做出判斷,決定是否啟動防撞方案,在確認安全后,Arduino主控單元持續識別紅外傳感器的反饋信號,根據反饋信號數據的不同組合,判斷小車當前位置狀態以及待執行的任務,對直流電機輸出相應的指令信號,及時調整小車下一步的運動狀態;若Arduino主控單元接收到終點信號,則控制小車停止,驅動機械臂松開快遞,進行下一次搬運,機械臂抓取流程如圖3所示。
1.4 返航模塊設計
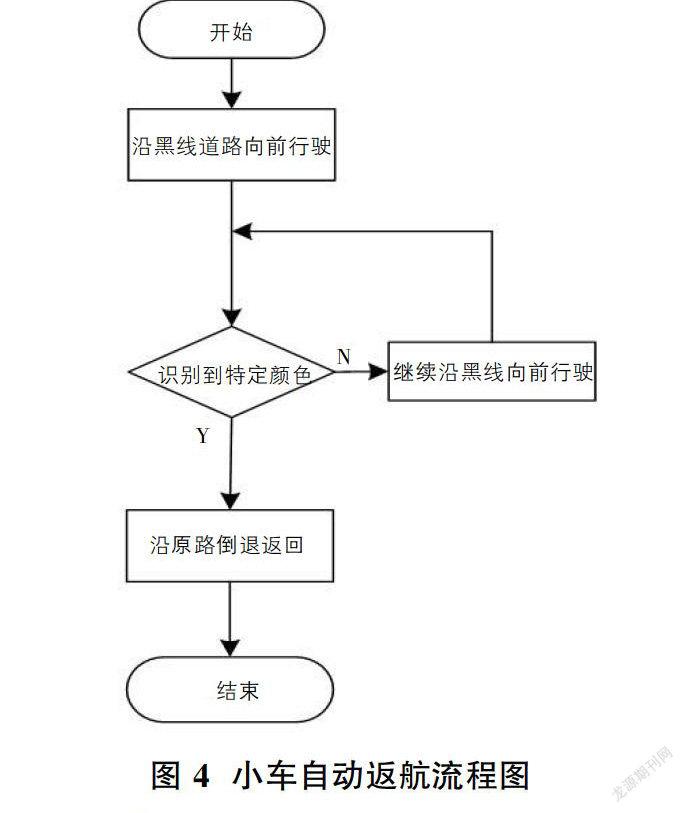
智能小車在完成快遞包裹運輸后,要實現小車能夠實現自動返回初始點,通過在終點路面鋪設特定顏色,使小車的顏色傳感器采集到指定顏色傳回給系統,系統做出相應的指令,使小車能夠有效準確地返回初始點。小車自動返回流程如圖4所示。
2? 結論
本文提出了一種集避障、循跡于一體的智能快遞運輸、投取小車的設計,對各個模塊功能的原理及制作過程進行了詳細的闡述。該智能快遞投取小車遵循模塊化的軟硬件設計原則。小車可根據環境障礙、光線角度的類型不同調整運行路線,實現智能避障、循跡行駛,將多類傳感器相結合實現快遞的無人化投取操作。通過自主設計的手機APP調節驅動電機的速度和舵機的轉向角度,調節快捷精確。該設計系統具有成本低廉,搬運效率高的特點,適用于現代運輸以及科學探測等領域,具有較強的經濟效益。今后智能快遞小車還將從全地形適應的角度進行進一步研究。
參考文獻:
[1]程立英,李鵬飛,白雪.基于Arduino單片機控制的避障小車的設計方案[C].中國:計算機產品與流通,2018-12.
[2]陳杰,宋恒宇,楊天祥.多樣信息采集智能小車的設計[J].科技視界,2020-4-15.
[3]周磊磊,余家天一,郭虓赫,周麗蓉,謝光前.基于STM32的模擬工業自動化智能搬運小車設計[J].電腦知識與技術,2020-3-25.
[4]白歡,白一博,鞏銀兵,車志忠.智能小車無線控制系統的設計與優化[J].南方農機,2020-1-15.
[5]郭子健.基于單片機的無線遙控智能小車的設計與制作[J].科技風,2014(13):68.
[6]單希明,劉薊南,張千宇.基于單片機的紅外避障與循跡智能小車[J].湖北農機化,2019(09):76.
[7]馬炳周.智能避障物料小車的設計及應用[J].科技風,2019(25):11.
[8]趙晉,郭煥萍,劉堃.基于Arduino小車的機械臂智能搬運研究[J].電子世界,2019(04):53-54.
猜你喜歡
科技與創新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業技術(2017年4期)2017-03-28 07:56:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯網技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28