基于線性自抗擾控制的海上無人艇航向控制
2020-10-13 06:32:32胡俊祥
安徽工程大學學報 2020年4期
關(guān)鍵詞:模型
胡俊祥,葛 愿*,劉 碩,葉 剛
(1.安徽工程大學 高端裝備先進感知與智能控制教育部重點實驗室,安徽 蕪湖 241000; 2.北京優(yōu)世達科技有限公司,北京 102433)
無人艇航向控制一直是研究無人艇運動控制領(lǐng)域的熱點,隨著控制理論不斷發(fā)展,很多學者在設(shè)計無人艇航向控制系統(tǒng)時做了許多嘗試。文獻[1]設(shè)計了基于改進PID控制的無人艇航向控制系統(tǒng),但是PID控制器在面對復雜海洋環(huán)境干擾時需要的控制精度還不夠,系統(tǒng)魯棒性一般。文獻[2]提出了一種結(jié)合自適應控制、反步控制和變節(jié)構(gòu)控制的方法,設(shè)計了無人艇航向控制自適應反步滑模控制律,系統(tǒng)魯棒性較強,但是對被控對象建模精度要求較高。文獻[3]提出了一種基于改進模糊預測控制的無人艇航向控制器,和傳統(tǒng)PID控制器實驗結(jié)果做了對比,仿真結(jié)果表明基于改進模糊預測控制的無人艇航向控制器航向跟蹤速度更快更穩(wěn)定。這些方法對被控對象數(shù)學模型精度要求高而且沒有綜合考慮海上風、浪、流干擾對無人艇海上航行造成的影響。
自抗擾控制由韓京清先生于20世紀90年代提出,自抗擾控制繼承了PID控制不依賴被控對象的具體模型的優(yōu)點。自抗擾控制由跟蹤微分器(Tracking Differentiator,TD)、擴張狀態(tài)觀測器(Extended State Observer,ESO)和非線性狀態(tài)誤差反饋控制律(Nonlinear State Error Feedback,NLSEF)組成,擴張狀態(tài)觀測器將系統(tǒng)的外部擾動和內(nèi)部擾動放在一起看成總擾動,然后對總擾動實時估計以及補償。由于自抗擾控制可調(diào)參數(shù)較多,所以給參數(shù)整定工作帶來一定難度,大多數(shù)情況下使用人工試湊的方法來整定參數(shù)。一種可行的解決方法就是優(yōu)化控制器設(shè)計復雜度,即將自抗擾控制器進行線性化處理。高志強教授通過設(shè)計線性擴張狀態(tài)觀測器(Liner Extended State Observer,LESO)和線性狀態(tài)誤差反饋控制律(Linear State Error Feedback,LSEF)共同組成線性自抗擾控制器,克服了自抗擾控制需要整定的參數(shù)多且難的問題[4]。在綜合考慮了無人艇難以精確建模和海上風、浪、流干擾對無人艇航向控制的影響的基礎(chǔ)之上,研究在無人艇航向控制系統(tǒng)中引入線性自抗擾控制,并與基于自抗擾控制的無人艇航向控制系統(tǒng)進行了對比。
1 海上無人艇和環(huán)境干擾建模
無人艇航向控制系統(tǒng)示意圖如圖1所示。無人艇航向控制系統(tǒng)可以看成舵機模型和無人艇運動數(shù)學模型串聯(lián)的系統(tǒng)。為了實現(xiàn)對復雜海況下無人艇的航向控制,首先需要建立無人艇運動學模型,然后建立無人艇舵機模型,最后建立風、浪、流干擾信號模型和航向控制器模型。
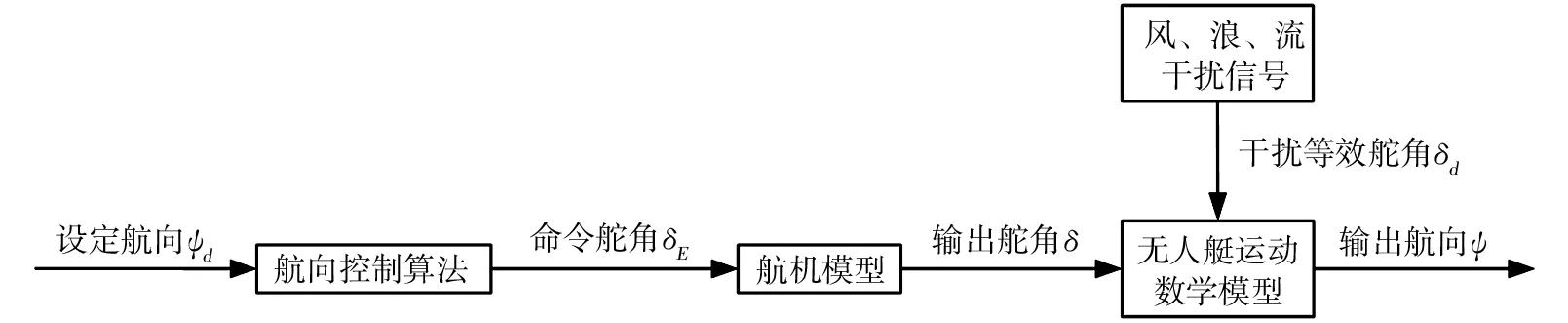
圖1 無人艇航向控制系統(tǒng)示意圖
1.1 無人艇運動學模型
重點研究無人艇空間運動3自由度模型,無人艇平面運動描述圖如圖2所示。其中,ψ為航向角;δ為舵角;V為無人艇運動速度[5]。

圖2 無人艇平面運動描述圖
根據(jù)無人艇平面運動模型建立如下無人艇運動方程[6]:
(1)
式中,u、v和r分別代表前進速度、橫漂速度和轉(zhuǎn)艏速度;m是無人艇的質(zhì)量;xc是無人艇質(zhì)心橫坐標,當坐標原點o和質(zhì)心重合時,xc=0;Izz是無人艇對oz軸慣性矩,z軸垂直x和y軸向下;X,Y,N分別為作用在3個坐標系上的外力。采用Abkowitz的方法,將無人艇做等速直線運動視為平衡狀態(tài)[7],有u=v0=V,在平衡狀態(tài)附近有u=u0+Δu,其中Δu是小量,將X,Y,N展開為Taylor級數(shù)形式并取其線性項,把無人艇運動方程兩端線性化處理,整理后可以得到:
(2)
日本學者野本將上述模型簡化為二階并推導出著名的Nomoto模型:
(3)
式中,K0和T0為無人艇操縱性指數(shù);K0是旋回性指數(shù);T0是追隨性指數(shù)。
1.2 舵機模型
舵機有死區(qū)、滯環(huán)、飽和等非線性特征,這些特征會或多或少影響海上無人艇控制系統(tǒng)性能[8]。舵機可以用下列模型表示:
(4)
式中,δE為命令舵角;TE為舵機時間常數(shù)(對于無人艇一般為5.4s);KE為舵機控制增益(通常約等于1)。


圖3 舵機非線性模型
1.3 環(huán)境干擾建模
無人艇海上航行時常常會受到風、浪、流的干擾,仿真時風、浪、流干擾可以看作等效舵角附加在無人艇上[9]。海風可以看作脈動風,一般認為是某種白噪聲,研究用零均值高斯白噪聲表示海風所產(chǎn)生的干擾力矩,功率譜密度為0.1;海浪干擾可以看成低頻的二階波浪干擾力,其傳遞函數(shù)為:
(5)

2 無人艇航向自抗擾控制器和線性自抗擾控制器設(shè)計
2.1 無人艇航向自抗擾控制器設(shè)計
自抗擾控制由三部分組成:跟蹤微分器(TD)、擴張狀態(tài)觀測器(ESO)和非線性狀態(tài)誤差反饋(NLSEF)。跟蹤微分器可以快速跟蹤輸入信號且不產(chǎn)生超調(diào),其利用非線性函數(shù)來實現(xiàn)對輸入信號廣義導數(shù)的一種光滑逼近,合理提取微分。擴張狀態(tài)觀測器是自抗擾控制器的靈魂,可以實時估計系統(tǒng)的內(nèi)部擾動和外部擾動。將跟蹤微分器和擴張狀態(tài)觀測器部分輸出的系統(tǒng)狀態(tài)變量誤差及擴張狀態(tài)觀測器部分輸出的擾動補償,進行適當?shù)姆蔷€性組合,得到非線性誤差反饋律[10]。以二階自抗擾控制器為例,假設(shè)一類不確定的控制對象為:

(6)


圖4 自抗擾控制系統(tǒng)原理圖
(1)跟蹤微分器。計算機本身為離散系統(tǒng),為了避免顫振現(xiàn)象,二階跟蹤微分器(TD)采用離散形式[11]:
(7)
式中,v(k)是輸入信號;x1(k)跟蹤輸入信號v(k);x2(k)跟蹤v(k)的微分;r是速度因子,反應跟蹤速度快慢;h是采樣步長,如果將fhan(x1,x2,r,h)中h改為h0可以實現(xiàn)濾波效果,通常h0=2~5h。離散系統(tǒng)最速控制綜合函數(shù)fhan(x1,x2,r,h)公式如式(8)所示:
(8)
(2)擴張狀態(tài)觀測器。為了便于計算機處理,減少計算量,三階擴張狀態(tài)觀測器(ESO)采用離散形式:
(9)
擴張狀態(tài)觀測器(ESO)是ADRC的核心,ESO通過對作用于系統(tǒng)的總擾動進行實時估計和觀測,通過合適的補償,把含有未知擾動的、內(nèi)部不確定的系統(tǒng)補償成線性積分器串聯(lián)標準型系統(tǒng)。其中,z1,z2是狀態(tài)變量的觀測;z3是對系統(tǒng)總擾動的估計;b為擾動補償因子。
(3)非線性狀態(tài)反饋控制律。在研究非線性誤差時,在系統(tǒng)穩(wěn)定的前提下,為了盡可能地減小甚至消除誤差,采用的NLSEF離散形式如下:
(10)
式中,e1,e2為狀態(tài)誤差;k1和k2為反饋控制增益;非線性狀態(tài)反饋可以減小系統(tǒng)的穩(wěn)態(tài)誤差,與跟蹤微分器給出的安排過程和擴張狀態(tài)觀測器的狀態(tài)估計結(jié)合生成需要的控制量。
2.2 無人艇航向線性自抗擾控制器設(shè)計
下面以二階線性自抗擾控制器構(gòu)成的系統(tǒng)來說明線性自抗擾控制器原理。將式(6)用狀態(tài)方程表示可以得到:
(11)
式中,b0是b的估計值,一般要求b=b0。線性狀態(tài)觀測器將內(nèi)部擾動和外部擾動相結(jié)合作為新的擴展狀態(tài)r(t),即總擾動。研究中將無人艇系統(tǒng)內(nèi)部噪聲干擾和風、浪、流干擾看成總擾動。
r(t)=f(x1,x2,w,t),
(12)

(13)
即
(14)

對式(11)建立如下線性擴張狀態(tài)觀測器(LESO),x3可以被LESO觀測:
(15)
在連續(xù)域分析LADRC時,控制器參數(shù)整定范圍大[12],根據(jù)計算機本身特性,采用LESO離散形式:
(16)

為了對擾動進行補償,設(shè)計線性狀態(tài)誤差反饋控制律(LSEF),可以得到:
u0(k)=k1e1(k)+k2e2(k),
(17)
式中,有e1(k)=v1(k)-z1(k),e2(k)=v2(k)-z2(k),線性自抗擾控制的控制量為:
(18)
可見,線性化后LSEF只需要調(diào)節(jié)k1和k2兩個參數(shù)。
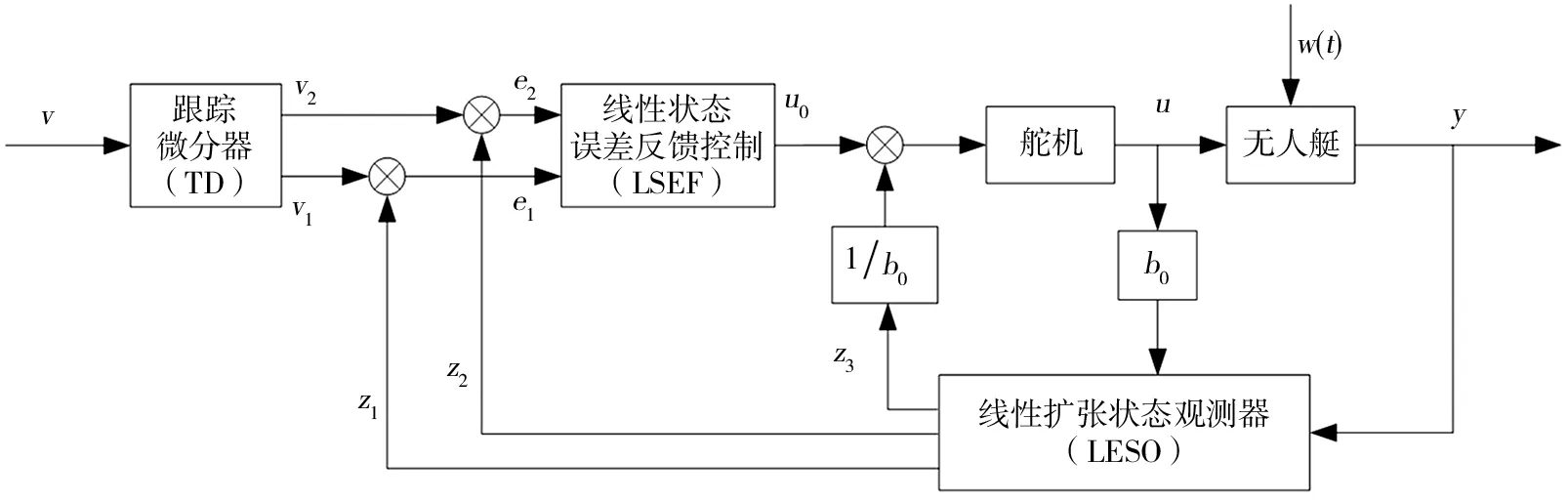
圖5 基于線性自抗擾控制無人艇航向控制系統(tǒng)原理圖
3 仿真結(jié)果分析
仿真實驗中使用的海上無人艇參數(shù)如表1所示。

表1 海上無人艇基本參數(shù)表
無人艇Nomoto模型如下:
(19)
自抗擾控制器仿真參數(shù):
TD:r=20,h=0.1,h0=0.5;ESO:β1=20,β2=25,β3=20,δ1=0.05;
NLSEF:k1=1.7,k2=20,α1=0.5,α2=0.25,δ2=0.05。
線性自抗擾控制器仿真參數(shù):
TD:r=20,h=0.1,h0=0.5;LESO:ω0=3.5;LSEF:k1=0.81,k2=4。
(1)無干擾時設(shè)定航向20°、120°時自抗擾控制器和線性自抗擾控制器仿真結(jié)果如圖6、圖7所示。由圖6、圖7可知,在無干擾情況下自抗擾控制器和線性自抗擾控制器都能在較好地滿足快速性的同時,不產(chǎn)生超調(diào),二者性能幾乎一樣。給定20°航向角時自抗擾控制器達到給定航向的速度和線性自抗擾控制器相比沒有優(yōu)勢,但是從舵角反饋看線性自抗擾控制器操舵所需要的能量略低。給定120°航向角時二者都表現(xiàn)了優(yōu)秀的性能,不論是靜態(tài)性能還是動態(tài)性能。

圖6 無干擾時設(shè)定航向20°時輸出航向角和舵角
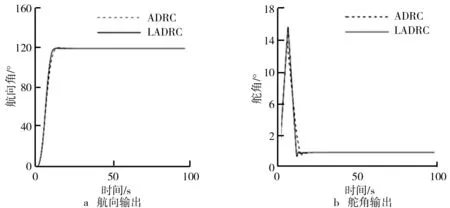
圖7 無干擾時設(shè)定航向120°時輸出航向角和舵角
(2)風、浪、流同時干擾設(shè)定航向20°、120°時自抗擾控制器和線性自抗擾控制器仿真結(jié)果如圖8、圖9所示。由圖8、圖9可知,從控制器性能上看,自抗擾控制器和線性自抗擾控制器在面對外界環(huán)境干擾時都表現(xiàn)出優(yōu)異的控制性能。二者輸出均較為穩(wěn)定,即使在面對大的航向角變化時系統(tǒng)依舊有著很強的魯棒性。實驗證明了在有外界環(huán)境干擾的情況下,在參數(shù)整定合理的情況下線性自抗擾控制器和自抗擾控制器控制性能相差無幾,但是線性自抗擾控制器需要整定的參數(shù)比自抗擾控制器少很多,操舵所需能量更低。

圖8 風、浪、流干擾下設(shè)定航向20°時輸出航向角和舵角

圖9 風、浪、流干擾下設(shè)定航向120°時輸出航向角和舵角
4 總結(jié)
研究基于線性自抗擾控制設(shè)計了海上無人艇航向控制系統(tǒng),仿真結(jié)果表明研究設(shè)計的基于線性自抗擾控制的海上無人艇控制系統(tǒng)對海洋環(huán)境未知干擾具有良好的穩(wěn)定性和魯棒性,航向控制效果理想。與傳統(tǒng)的自抗擾控制器相比,研究引入的線性自抗擾控制器設(shè)計難度大大降低,這為解決無人艇自抗擾控制器參數(shù)整定問題提供了一種新的解決思路。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19