基于PD控制的仿昆蟲撲翼樣機研制
2020-12-02 08:32:58劉晶汪超謝鵬周超英
航空學報 2020年9期
劉晶,汪超,謝鵬,周超英,*
1. 哈爾濱工業大學(深圳)機電工程與自動化學院,深圳 518055 2. 東莞理工學院 機械工程學院,東莞 523000 3. 深圳技術大學 中德智能制造學院,深圳 518118
微型撲翼飛行器(FW-MAV)這一概念最早由美國國防高級研究計劃局(DARPA)提出,是一種模仿鳥類及昆蟲飛行姿態的新型飛行器。仿鳥微型撲翼飛行器模仿鳥類撲動前飛飛行姿態,相比之下,仿昆蟲微型撲翼飛行器飛行方式更加靈活,其模仿昆蟲懸停、垂直起飛及側向飛行姿態,可適應更復雜多障礙環境,具有更廣闊應用前景。到目前為止,國內外各大科研機構都已相繼對該領域展開了研究,也先后推出了其成功研制的仿昆蟲微型撲翼飛行器。
由美國Aero Vironment公司研發的超微型飛行器Nano Hummingbird[1]是世界上第一臺可成功實現控制飛行的仿蜂鳥微型撲翼飛行器(蜂鳥飛行方式與昆蟲類似),其翼展長16 cm,重19 g,采用全繩傳動實現樣機撲動,翅翼為柔性翼設計,可懸停飛行及切換到側飛狀態。在DARPA的資助下,哈佛大學Robobees團隊開展了仿蜜蜂微型飛行器Robobee[2-5]的研究,并于2008年成功試飛第一款樣機,其利用壓電結構實現樣機撲動,采用剛性翼設計,可懸停及機動飛行。Maryland大學研制了一款重62 g,撲動頻率為22 Hz的仿蜂鳥微型撲翼樣機Robotic hummingbird FW-MAV[6],撲動機構由曲柄搖桿與曲柄滑塊組成,采用柔性翼設計,該樣機成功實現6 s懸停飛行。荷蘭代爾夫特大學近些年來成功研制了一系列仿昆蟲撲翼樣機[7-11],其最新一款仿果蠅撲翼飛行器,重28.2 g,翼展33 cm,撲動頻率可達17 Hz,采用2個單曲柄雙搖桿機構實現樣機撲動,翅翼為柔性翼設計,可實現敏捷前飛及懸停飛行。韓國建國大學[12]從仿生學角度出發,研制出了一款重7.36 g,翼展12.5 cm的仿昆蟲撲翼飛行器,其撲動機構由曲柄滑塊與曲柄搖桿組成,采用柔性翼設計,該飛行器可實現無控垂直起飛。德國FESTO公司于2013年研制了一款仿蜻蜓撲翼飛行器“BionicOpter”[13],其翼展63 cm,重175 g,撲動頻率約為20 Hz,可像真實蜻蜓一樣飛行、轉向及懸停,4個翅膀都可單獨控制,具有較高自由度。同時,該公司于2015年研制了一款仿蝴蝶撲翼飛行器“eMotionButterflies”[14],其翼展50 cm,重32 g,借助外部紅外攝像機及機身上的2個紅外LED燈,可實現3~4 min飛行。美國喬治亞理工學院聯合劍橋大學研制了一款仿昆蟲機器人“Entomopter”[15],其擁有2對類似于蝴蝶的翅膀,長25.4 cm,由往復式化學肌肉提供動力形成翅翼撲動運動。
目前,仿昆蟲微型撲翼樣機研究領域仍有許多問題亟需解決,其中較為關鍵的有撲動機構設計、翅翼設計及姿態控制。在本文中,考慮到已有樣機撲動方案存在高摩擦、加工裝配復雜、不易改變撲動幅值等問題,選取結合了曲柄搖桿與滑輪的機構作為樣機撲動方案,其突出特點為低摩擦性、機構原理簡單、加工裝配方便及可通過改變滑輪間傳動比靈活改變樣機撲動幅度。在綜合已有的樣機翅翼研究成果基礎上,撲動效率更高的負扭轉翼被選定為樣機翅翼。考慮到當前已有姿態調節機制存在增加機構復雜度問題,采用了一種基于翅翼扭轉的姿態調節機制,該機制實現簡單,控制靈活,并據此設計了相關機構。最終成功研制了一款翼展18 cm,重23.8 g,撲動幅值為180°,撲動頻率可達22 Hz的仿昆蟲撲翼樣機。相關升力及姿態力矩測量實驗驗證了樣機氣動性能及姿態調節機制的可行性。為快速實現樣機控制,選取了適應性較強的PD(Proportional Differential)控制律作為樣機控制方式,為解決參數調定耗時及樣機試飛調定效果不易觀察問題,將調定過程分為兩步進行,首先搭建了姿態調節平臺,通過該平臺觀察了調定效果及快速獲取了初始控制參數,在樣機已有一定控制能力基礎上,試飛樣機,觀察飛行效果并調定了參數,最終實現了樣機穩定垂直起飛。
1 撲翼樣機整體結構設計
穩定的樣機飛行平臺是對仿昆蟲微型撲翼飛行器進行深入研究的基礎,本節為樣機的整體結構設計,主要包括:撲動機構設計、翅翼設計及姿態調節機構設計。
1.1 撲動機構設計
撲動機構設計是成功研制樣機的關鍵,也是樣機整體結構設計的第一步。為實現昆蟲大幅值撲動[16-17](約180°),各仿昆蟲撲翼樣機研究機構都提出了自己的樣機撲動方案[1, 6, 12, 18-19],為解決傳統樣機撲動機構(曲柄搖桿機構)撲動幅值范圍有限問題,大部分方案都是在傳統撲動機構基礎上通過結合其余機構實現大幅值撲動,例如曲柄滑塊結合雙搖桿、曲柄滑塊結合齒輪齒條等,這些方案雖然都實現了大幅值撲動,但存在機構復雜、撲動摩擦力大及不易加工與裝配等問題,綜合以上分析,最終所確定樣機撲動方案如圖1所示,該方案原理簡單、加工裝配方便,只需改變大小滑輪傳動比便可實現樣機撲動,該方案受Nano Hummingbird及韓國建國大學的KUBeetle[20]樣機撲動方案啟發。
圖1所示為曲柄搖桿機構與滑輪機構所組成的機構原理圖,其中P1P0P3P2和P0P′1P′2P3分別為搖桿運動極限狀態,a為曲柄,其固定于減速系統最后一級齒輪,將電機轉動運動形式通過連桿b傳遞給搖桿c,形成樣機撲動運動。搖桿c固定于大滑輪,大小滑輪之間通過細繩連接,形成滑輪之間帶傳動。為使樣機穩定飛行,樣機上下撲動應對稱,即應滿足βmax=βmin。同時,為保證兩端輸出桿撲動形式對稱,控制某一端大小滑輪之間傳動繩在連接之前反轉180°,如圖所示。為方便設計機構尺寸,在確定機構尺寸大小時,c、d及搖桿輸出角β被設置為輸入參數

圖1 撲動機構原理圖Fig.1 Schematic of flapping mechanism
。
根據余弦定理,曲柄a及連桿b長度可以表示為
(1)
(2)

搖桿輸出角β可定義為
(3)
式中:F、M及W定義為
(4)
(5)
(6)
式中:φ為曲柄輸入角,如圖1(b)所示。
輸出端撲動角ψ可定義為
(7)
式中:r1和r2分別為大滑輪半徑和小滑輪半徑。
為加工裝配方便,選取二級直齒圓柱齒輪系統作為樣機減速系統,齒輪減速比為16.2。為使撲動頻率盡可能大,選取空心杯電機作為樣機驅動電機。最終得如圖2所示樣機撲動機構。
該撲動機構重3.7 g,撲動幅度設計為180°,為減輕機身重量,前后兩面機架板及連桿由碳纖維板切割而成,大小滑輪通過光敏樹脂3D打印完成,滑輪間通過普通棉繩傳動。
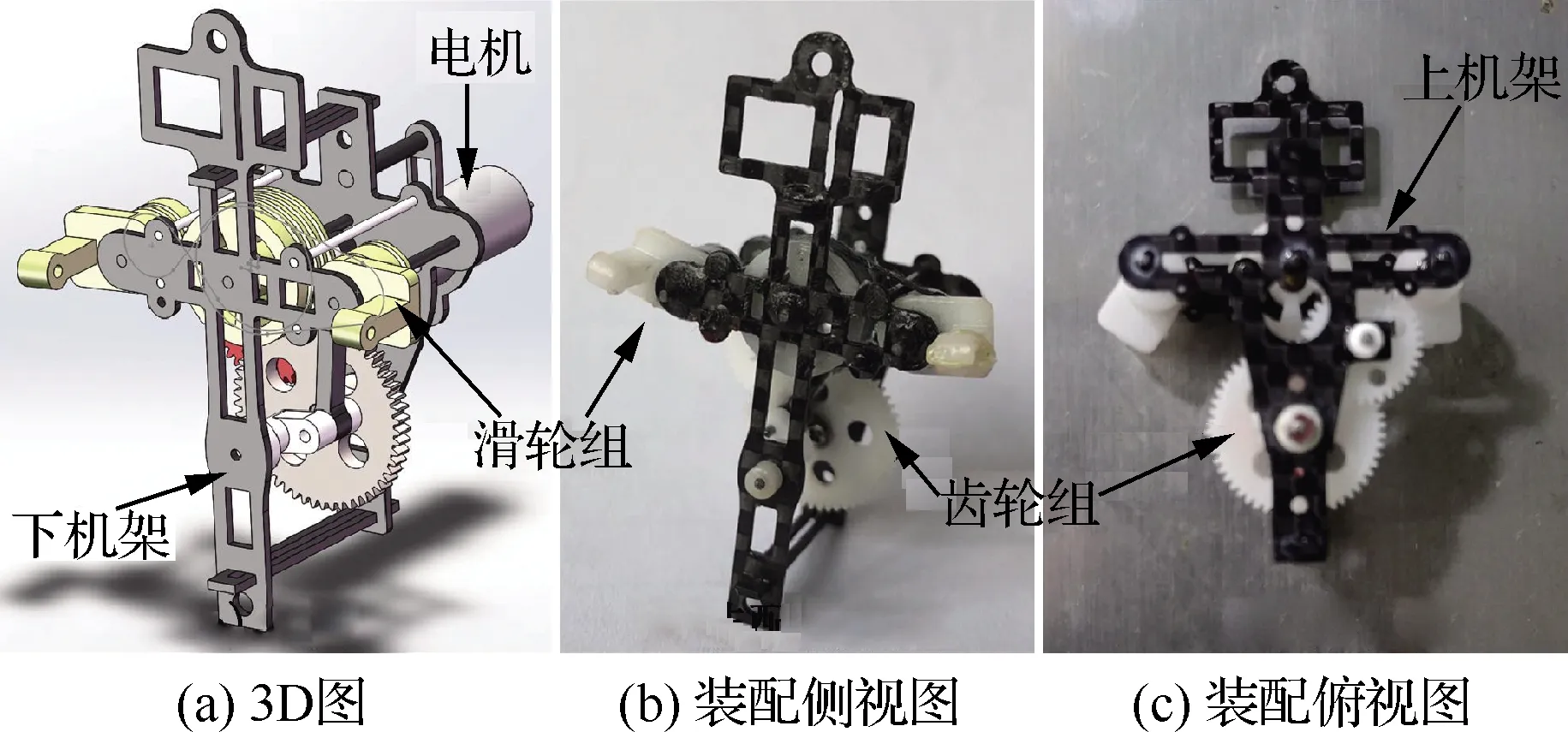
圖2 樣機撲動機構Fig.2 Flapping mechanism of vehicle
1.2 翅翼設計
國內外實驗研究已經表明,相比于剛性翼,柔性翼撲動時,其弦向及展向存在一定變形,可產生更大升力及推力,具有更高氣動性能[21-24]。例如密西根大學的Wei Shyy通過數值模擬研究發現,相比于剛性翼,由于柔性翅翼存在被動扭轉,在撲動過程中反而可以消除渦流對翅翼的負面影響,起到增強翅翼氣動性能作用;哈佛大學的研究學者通過人工加強熊蜂的翅翼剛度發現,在撲動幅度與撲動頻率不變的情況下,熊蜂的氣動升力會有所下降。
圖3所示翼型稱為負扭轉柔性翼型[25],其已被成功應用于Nano Hummingbird、hummingbird-sized FW-MAV[26]及KUBeetle等微型撲翼樣機中。其中,Robotic hummingbird FW-MAV研究團隊在研究翅翼過程中發現使翅翼面與垂直方向存有一定傾角可顯著增大翅翼升力。KUBeetle[27-29]研究團隊采用非定常葉素理論,同時考慮樣機功率負載因素,通過與平面翼(迎角從翼根到翼尖不變)比較發現該種翅翼類型撲動效率更高。
因此,在綜合早期學者已有研究成果基礎上,本課題采用了負扭轉柔性翅翼設計,圖3所示即為本課題所設計樣機翅翼。該翅翼單邊翼展80 mm,平均弦長35 mm。為減小翅翼撲動慣性力,采用厚度為0.012 5 mm PET(聚酯薄膜)加工完成,該種材料密度低、強度高及使用壽命長。為增強翼面剛度,每個翼面被粘覆4根直徑為0.25 mm 細小碳棒。為保證翅翼安裝進入樣機之后翼面能夠與垂直方向形成一定傾角,翼根向外伸出,并與撲動軸形成一定角度,設計翅翼參數時,選定σ=15°,使得翅翼安裝進入樣機之后,有一定自然傾角。為便于前緣桿與翼根桿裝入及保證翅翼靈活撲動變形,增強翅翼氣動性能,使翅翼面翅翼前緣處與翅翼根部處卷曲,形成一通孔,如圖3所示。
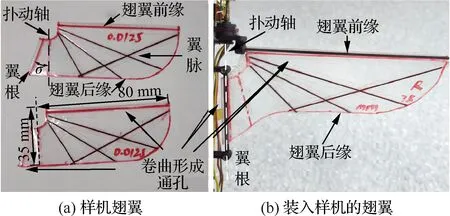
圖3 樣機翼型Fig.3 Airfoil of prototype
1.3 姿態調節機構設計
本文所研究撲翼樣機為無尾翼撲翼飛行器,若需控制撲翼樣機穩定飛行,則唯一可行方案為模仿昆蟲姿態力矩產生機制,即通過樣機翅翼產生俯仰姿態及滾轉姿態控制力矩。目前,常用的一些姿態調節機制有基于改變撲動平面與水平面夾角的機制[6]及基于使左右及上下撲動產生幅值或速度差異的機制[5,11]或同時混合使用以上所介紹機制,但這些機制都存在增加了機構復雜度問題,因此,為在不增加機構復雜度前提下實現姿態調節,研究中采用了基于翅翼扭轉的姿態調節機制[1,20],該機制只需控制翅翼根部轉動即可實現姿態調節,簡單、易行,如圖4所示。
圖4(a)及圖4(b)所示為俯仰姿態控制機制。

圖4 樣機姿態調節機制Fig.4 Attitude adjustment mechanism of vehicle
圖4(a)所示為:若需控制樣機后飛,可通過控制左右翅翼同時繞y軸旋轉一定角度+σp,產生俯仰后飛力矩。圖4(b)所示為:若需控制樣機前飛,可通過控制左右翅翼同時繞y軸旋轉一相反角度-σp,產生俯仰前飛力矩。
圖4(c)及圖4(d)所示為滾轉姿態控制機制。圖4(c)所示為:若需控制樣機右飛,可通過控制左右翅翼同時繞x軸旋轉一定角度-σr,產生滾轉右飛力矩。圖4(d)所示為:若需控制樣機左飛,可通過控制左右翅翼同時繞x軸旋轉一相反角度+σr,產生滾轉左飛力矩。
理論上講,如果合理控制撲翼飛行器俯仰及滾轉力矩,樣機則可以實現穩定垂直起飛、懸停等飛行姿態。偏航力矩的存在只是使得撲翼樣機繞z軸旋轉,同時考慮到增加偏航力矩調節機構會使得樣機結構復雜,機身過重,可能無法成功起飛,故本撲翼飛行器暫不考慮偏航力矩。
根據以上姿態調節機制,利用三維制圖軟件設計姿態調節機構,如圖5所示。圖5(a)所示為俯仰姿態控制機構設計圖,圖中所示A、B、C、D4點組成一四連桿機構,俯仰舵機通過該四連桿機構與翼根連接桿相連,翼根連接桿連接兩端翅翼根部,如此當舵機轉動時,可控制左右翅翼平面繞y軸轉動,達到樣機俯仰控制。圖5(c)所示為滾轉姿態控制機構設計圖,圖中所示E、F、G、H四點組成一平行四邊形機構,滾轉舵機通過舵盤直接與翼根連接桿相連,如此當滾轉舵機轉動時,可帶動左右翅翼繞x軸同方向轉動,產生滾轉姿態控制力矩。
至此,撲翼樣機撲動機構設計、翅翼設計及姿態調節機構設計都已全部設計完成。經加工裝配得如圖6所示微型撲翼飛行器,其翼展18 cm,重17 g,撲動幅值可達180°。

圖5 撲翼樣機三維圖Fig.5 FW-MAV designed by 3D modeling software
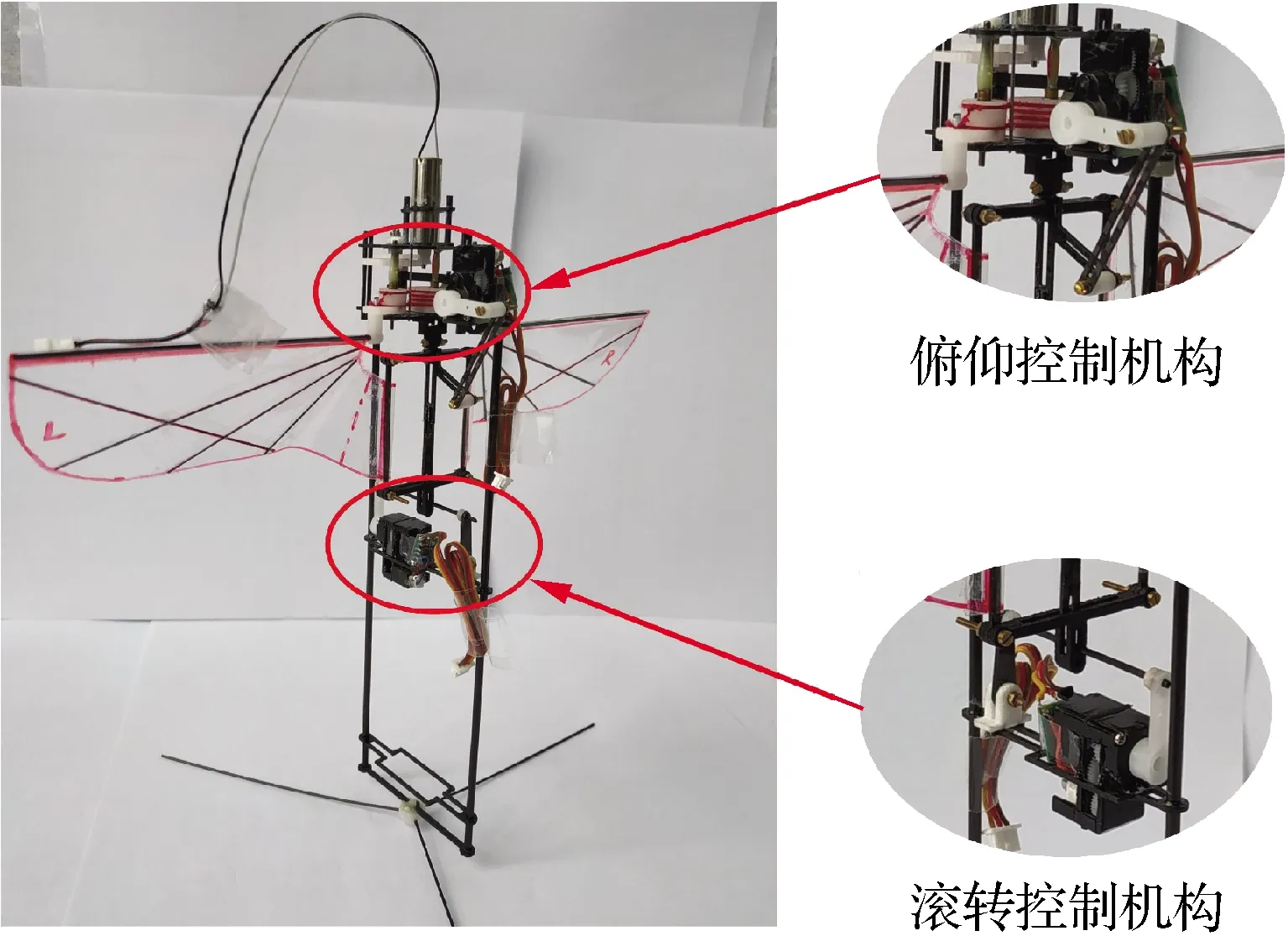
圖6 撲翼樣機Fig.6 Flapping wing micro air vehicle
2 撲翼樣機升力及姿態力矩測量
第1節內容中,已獲得一穩定飛行平臺,在搭建控制系統實現樣機穩定飛行之前,需進行相關測量實驗驗證其姿態調節機制可行性及判斷翅翼是否可提供足夠升力。測量平臺如圖7所示。
實驗平臺由深圳鑫立XX-1-30V150A外部直流電源、PC機、NI USB-6210數據采集卡、舵機控制器、Nano17Ti SI-8-0.05六軸力矩傳感器及撲翼樣機組成。
本課題的研究目標是研制一款可實現垂直起飛及穩定懸停飛行的撲翼樣機,對于實際飛行過程中,空氣來流對于翅翼所產生姿態力矩及升力的影響,本課題暫不考慮。
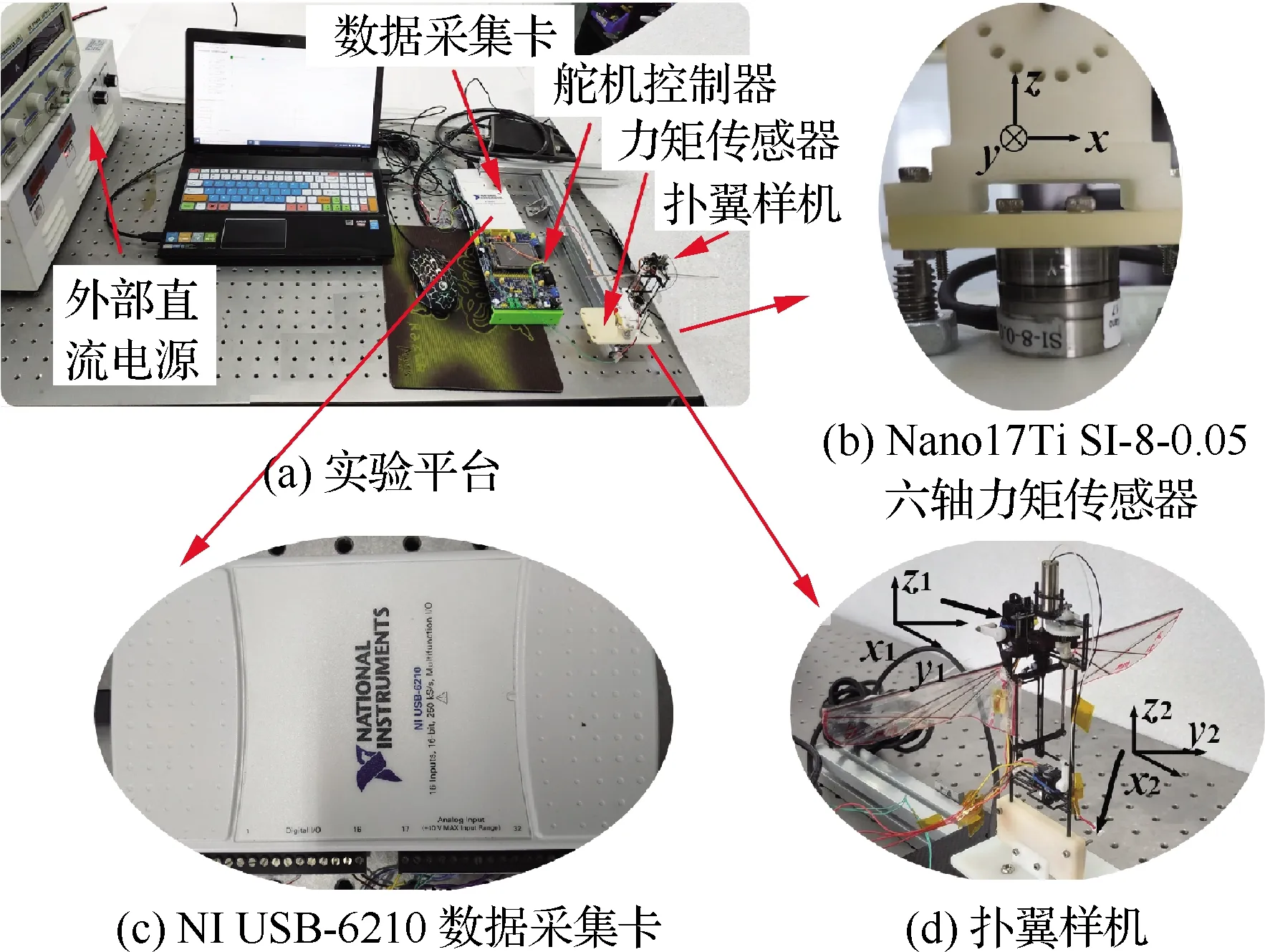
圖7 升力及姿態力矩測量平臺Fig.7 Platform of lift and attitude torque measurement
2.1 姿態力矩測量
首先進行姿態力矩測定,固定樣機撲動頻率為12 Hz,將所測得周期性數據采用線性最小二乘算法濾波后求取平均值,并作為每次實驗結果值。俯仰及滾轉角度變化范圍均為:-10°、-5°、0°、+5°、+10°(樣機坐標與圖4所定義樣機坐標一致)。結果如圖8所示,Tx、Ty、Tz分別為x、y、z軸的力矩。
圖8(a)所示為俯仰姿態下三軸力矩曲線,圖8(b) 所示為滾轉姿態下三軸力矩曲線,由圖可知,當偏轉角由-10°變化至+10°時,俯仰力矩及滾轉力矩都呈線性規律變化,其余軸雖然也產生一定量力矩,但無變化趨勢。
由實驗結果可得,樣機翅翼產生了預期姿態力矩,對稱偏轉位置力矩也大致相等,方向與姿態調節機制內容中所分析結果一致,由此也驗證了1.3節內容中所提出姿態調節機制可行性。

圖8 俯仰和滾轉姿態下三軸力矩曲線Fig.8 Torque curves of three axes with pitch and roll attitude
2.2 樣機升力測量
在已確定樣機姿態調節機制可行性基礎上,為保證樣機搭載傳感器等器件之后能夠順利起飛,以達到飛行控制目的,需要測定樣機升力。姿態力矩測量實驗中所采用傳感器量程有限,在頻率大于14 Hz時會發生數據錯誤,更換為SRI M3813A六軸力矩傳感器。最終升力測定情況如圖9所示。
所測量頻率有:5 Hz、11 Hz、14 Hz、17 Hz、19 Hz、21 Hz及22 Hz,由于撲動頻率超過22 Hz之后,樣機齒輪及電機易損壞,無法獲得真實升力數據,所以未能測定。由圖9可得,其最大可提供25.8 g升力,已知樣機重17 g,預計額外的控制系統重量最大為6 g,可得翅翼可為樣機提供足夠升力。
圖10所示為俯仰姿態下氣動升力變化情況,圖11所示為滾轉姿態下氣動升力變化情況,2次實驗中都分別測定了樣機在11 Hz、14 Hz、17 Hz及19 Hz撲動頻率下,在偏轉角為-10°、-5°、0°、+5°、+10°情況下的樣機升力大小,由圖10和圖11可得,樣機確實存在一定升力損失,但大體損失不大,最大約為1 g,若使得樣機最大撲動頻率為22 Hz,保守估計應控制機身重量在23.8 g以下。
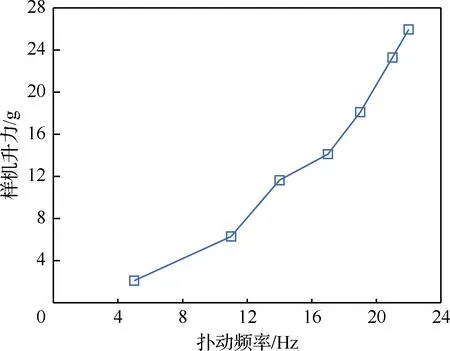
圖9 樣機升力曲線Fig.9 Lift curves of vehicle
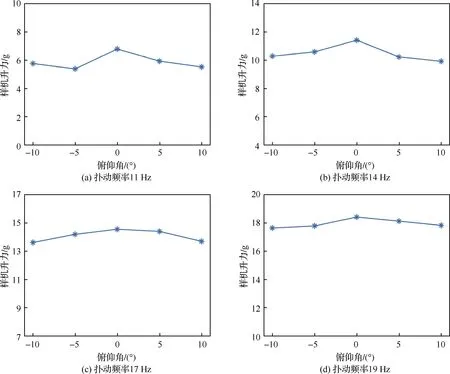
圖10 俯仰姿態下樣機升力曲線Fig.10 Lift curves of vehicle with pitch attitude
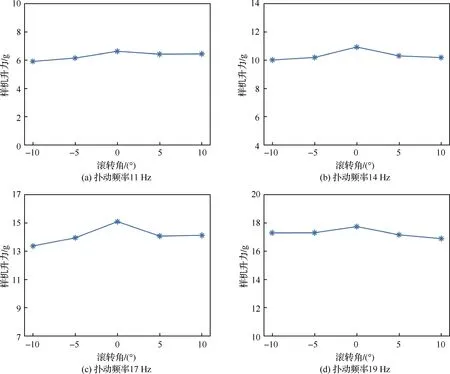
圖11 滾轉姿態下樣機升力曲線Fig.11 Lift curves of vehicle with roll attitude
3 撲翼樣機姿態控制
前文通過提出相關撲動方案及姿態調節機制,已獲得微型撲翼飛行器。同時,通過力矩測量實驗,證明了其姿態調節機制可行性,通過升力測量實驗,證明了翅翼可為樣機飛行提供足夠升力。本節為撲翼樣機的姿態控制研究,主要包括:控制系統設計、樣機姿態調節及樣機試飛。
3.1 控制系統設計
樣機姿態調節控制的首要任務是搭建樣機控制系統,為快速實現樣機控制,選定適應性強、控制簡單的PID(Proportion Integral Differential)控制律作為樣機控制方式,同時考慮到樣機控制屬于實時性較強控制場景,引入微分環節容易導致飽和,最終確定控制方式為PD控制,圖12所示為撲翼樣機控制原理。連續系統中的PD控制律控制方程為
(8)
式中:U(t)為控制器輸出;err(t)為設定值與實際值之差;Kp為比例系數;Kd為微分系數。
設定err(k)為時刻k所對應采樣值,采樣周期為T,以一階后向差分近似代替微分,則PD控制律的離散化方程為
U(k)=Kp×err(k)+Kd×(err(k)-err(k-1))
(9)
至此,已得到樣機姿態控制方程,后續可據此編寫樣機姿態控制程序,通過調定Kp、Kd兩個參數,達到控制樣機穩定飛行目的。
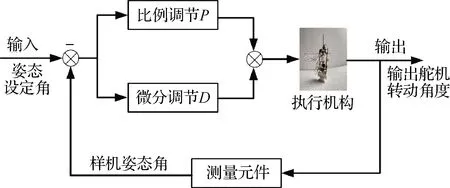
圖12 樣機控制原理Fig.12 Principle of vehicle control
在搭建樣機控制系統電路時,選定Arduino pro mini作為樣機微控制器;選定內部集成了姿態解算器及動態卡爾曼濾波算法的MPU6050傳感器作為姿態傳感器,可直接輸出姿態角;舵機采用杜曼超微型舵機DM-S0020;無線傳輸模塊采用NRF24L01+迷你無線傳輸模塊,用于傳輸樣機姿態。搭載了控制系統的撲翼樣機最終重23.8 g,撲動頻率可達22 Hz。
3.2 樣機姿態調節
由PD控制律離散化方程可知,采用PD控制方式的關鍵是獲取Kp及Kd兩個控制參數。工程應用中常采用工程整定法獲取PD控制方程控制參數,常見的工程整定法有:經驗法、臨界比例度法、衰減曲線法及反應曲線法。使用后3種方法需要對系統施加相應作用并觀察樣機反應曲線,記錄相關數據以用于計算控制參數,實際樣機調節中,難以實現相應作用的施加,相關狀態也不易觀察記錄,且得到的參數仍需采用經驗法調整,故研究中直接采用經驗法獲取控制參數。
但考慮到采用經驗法獲取控制參數非常耗時及直接試飛樣機調定參數不易觀察控制效果,為此,將參數調定過程分為2步,首先搭建姿態調節平臺,用于直觀觀察控制效果及獲取樣機初始控制參數,基于此參數,進行樣機試飛實驗,再經調定,最終獲取合理樣機控制參數。如此,可簡單及快速地實現樣機飛行控制。圖13所示為樣機姿態調節平臺,該平臺底座通過3D打印完成,為減輕平臺對樣機影響,十字框架采用碳纖維板切割完成,所有轉動連接處采用軸承連接。
樣機姿態調節過程分為3步,先俯仰調節,再滾轉調節,最后整體調節。圖14所示為最終俯仰和滾轉調節情況。

圖13 姿態調節平臺Fig.13 Platform of attitude adjustment

圖14 俯仰和滾轉調節曲線Fig.14 Curves of pitch roll and adjustment
由圖14(a)可知,單純俯仰調節下,樣機自身姿態可以穩定在±2°范圍內;由圖14(b)可知,單純滾轉調節下,樣機自身姿態可以穩定在±1.5°范圍內。總體來說,機身姿態較為穩定,達到了一定控制效果,其中,俯仰控制參數為:Kp=1,Kd=0.5;滾轉控制參數為:Kp=1,Kd=0.4。
進一步實驗結果表明,在使用單方向調節所獲取控制參數進行整體調節時,樣機已可表現出良好控制特性,整體姿態維持在±2°范圍內,控制效果較為良好,可為下一步樣機試飛實驗提供良好初始控制參數。則最終所確定樣機初始控制參數為:俯仰方向:Kp=1,Kd=0.5;滾轉方向:Kp=1,Kd=0.4。隨機采集的4幅整體調節姿態曲線變化情況如圖15所示。
3.3 樣機試飛實驗
在姿態調節實驗中,通過搭建姿態調節平臺,已初步獲取姿態控制參數,但姿態調節平臺系統與微型撲翼樣機系統之間存在差異,并不能保證初步獲取控制參數完全適用于微型撲翼樣機系統,需要進一步通過飛行試飛實驗,觀察飛行效果,調定控制參數,可獲取最終控制參數。
樣機參數調定過程為:利用相機拍攝樣機飛行過程,觀察俯仰及滾轉方向反應效果,若反應過快,則減小該系數,若反應過慢,則增大該系數。由于比例系數對樣機控制反應起主要效果,所以調定過程中主要對比例系數進行調定。最終,歷經多次調試飛行,樣機可較為穩定垂直起飛,最終所得控制參數為:俯仰方向,Kp=5,Kd=0.5;滾轉方向,Kp=4,Kd=0.4。樣機2次起飛情況如圖16及圖17所示。
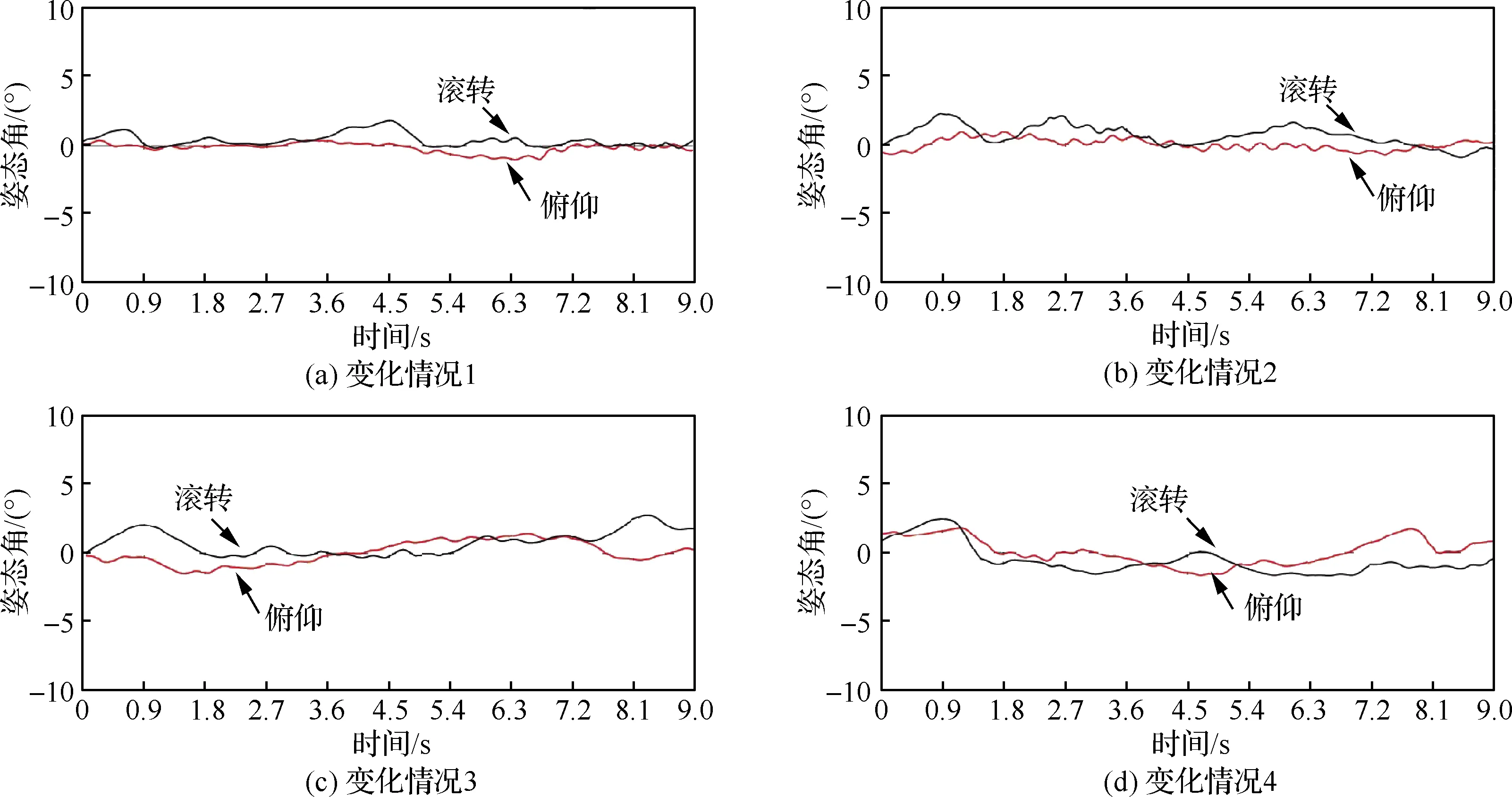
圖15 整體調節曲線Fig.15 Curves of overall adjustment
在無控制作用情況下,垂直起飛類撲翼樣機飛行姿態非常不穩定,本文所介紹撲翼樣機的穩定垂直起飛表明,當采用PID控制律用于樣機控制飛行時,將簡單易行的經驗法結合“先平臺調定,再試飛調定”的參數調定方式可快速實現撲翼樣機控制飛行,對于該類樣機姿態控制飛行研究具有一定的參考價值。
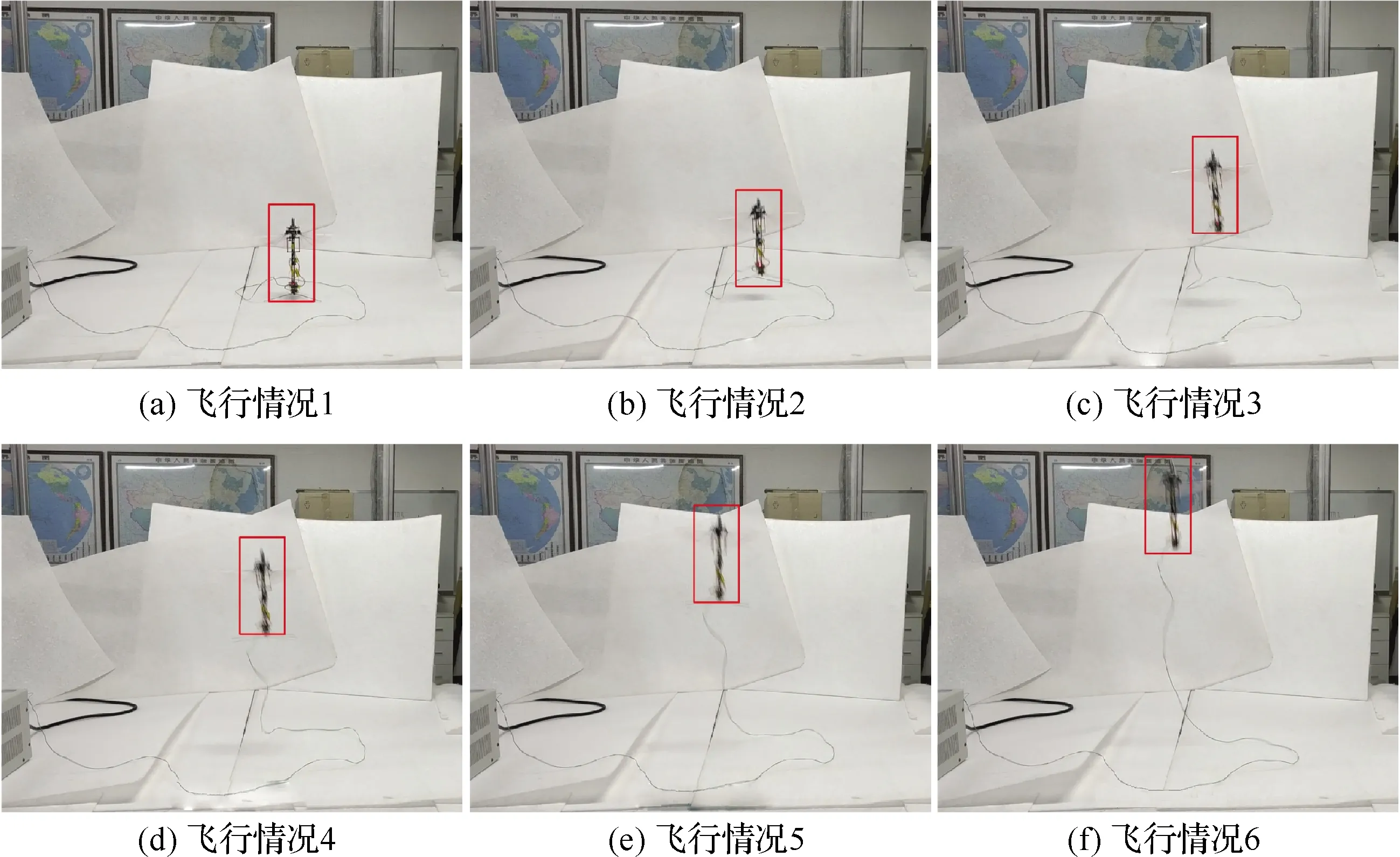
圖16 第1次樣機垂直起飛實驗Fig.16 The first vertical takeoff test of vehicle
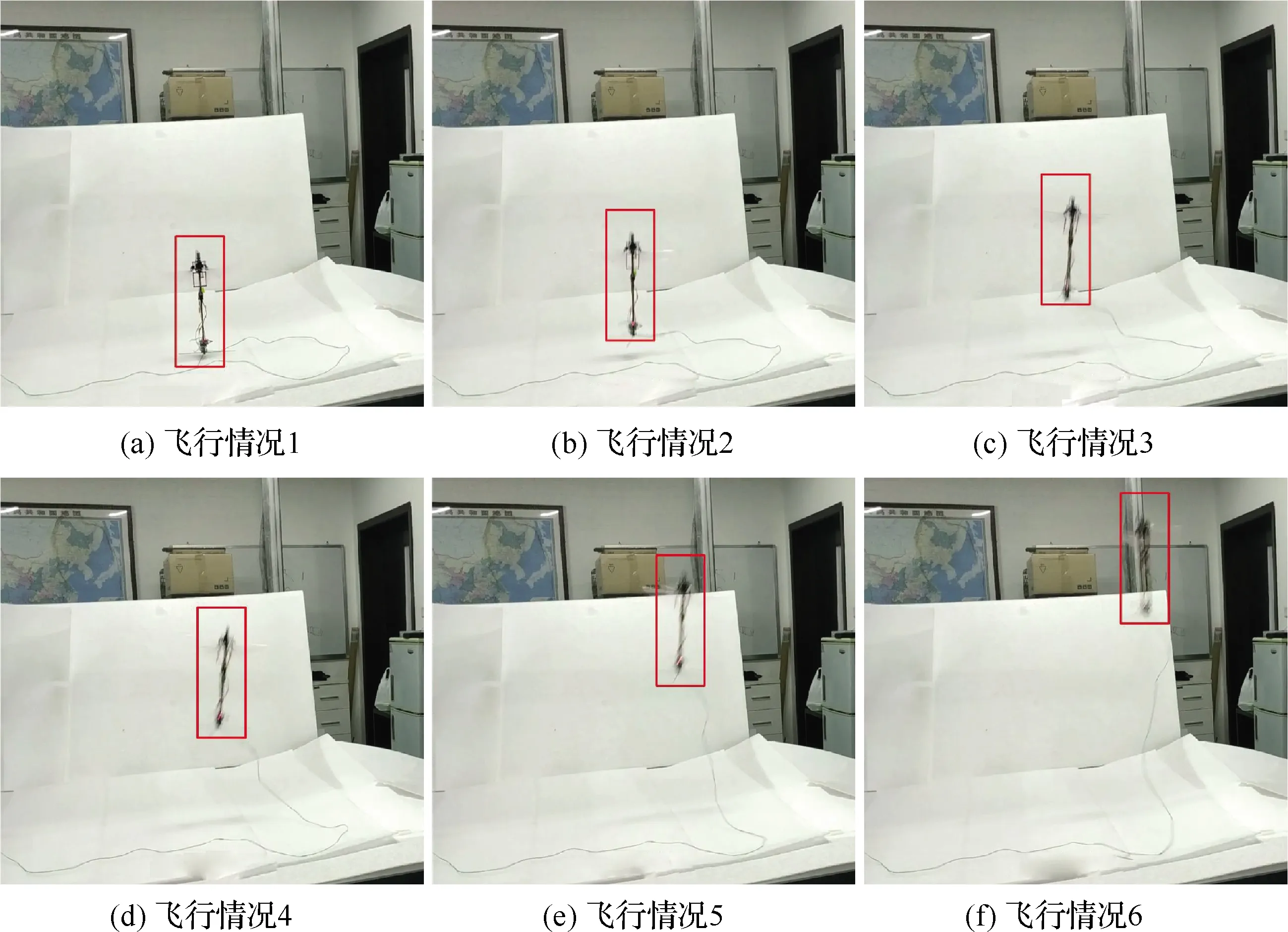
圖17 第2次樣機垂直起飛實驗Fig.17 The second vertical takeoff test of vehicle
4 結 論
本文介紹了一款仿昆蟲微型撲翼樣機的設計內容,通過提出相關樣機撲動方案及姿態調節機制,測定升力與姿態力矩及設計樣機控制系統,最終實現了樣機穩定垂直起飛。主要結論如下:
1) 選定了由曲柄搖桿與滑輪組成的復合機構作為樣機撲動方案,該方案良好解決了已有樣機撲動方案存在的高摩擦、結構復雜及不易加工裝配問題,并可靈活改變樣機撲動幅值。在綜合已有撲翼樣機翅翼研究成果基礎上,撲動效率更高的柔性扭轉翼型被選定為樣機翅翼。考慮到已有樣機姿態調節機制存在增加機構復雜度問題,采用了基于翅翼扭轉的樣機姿態調節機制,該機制實現簡單,控制方便,并設計了相關機構。最終,成功研制了一款重23.8 g,翼展為18 cm,撲動幅值可達180°,撲動頻率可達22 Hz的仿昆蟲微型撲翼飛行器。
2) 樣機氣動升力測量結果表明,樣機翅翼在22 Hz撲動頻率下,可產生25.8 g升力。樣機姿態力矩測量結果表明,翅翼可產生預期姿態力矩,所提出姿態調節機制具有可行性。通過測量姿態調節情況下的氣動升力,結果發現樣機有最大約1 g氣動力損失,若使得撲動頻率最大為22 Hz,樣機重量應控制在24.8 g以下。
3) 為快速實現樣機控制,適應性較強的PD控制律被選定為樣機飛行控制方式。同時,為克服直接試飛樣機調定參數不易觀察飛控效果及解決采用經驗法調定參數耗時問題,參數調定過程分為兩步進行,首先搭建了姿態調節平臺,用于直觀觀察控制效果及獲取樣機初始控制參數;基于此參數,進行樣機試飛實驗,再經調定,最終獲取到了合理樣機控制參數,并成功實現樣機穩定垂直起飛,也同時證明該種參數調定方式適合推廣用于該類垂直起飛樣機姿態控制研究。
