復合式高速直升機過渡模式控制器設計
2021-02-03 11:13:42江順陳燕云何偉盛守照
機械制造與自動化 2021年1期
關鍵詞:平尾
江順,陳燕云,何偉,盛守照
(南京航空航天大學 自動化學院,江蘇 南京 210016)
0 引言
復合式高速直升機是一種區別于常規固定翼飛機和直升機的新型飛行器,兼具常規直升機的垂直起降功能和固定翼飛機的高速巡航能力,具有極大的應用前景[1]。
然而,復合式高速直升機飛行性能大幅提高的同時也加大了控制系統的設計難度。復合式高速直升機具有3種飛行模式:低速模式、高速模式及在低速模式與高速模式間切換的過渡模式。在低速模式和高速模式時可以分別按直升機和固定翼飛機的控制方法進行控制,但過渡模式存在強非線性和控制輸入轉移等問題,研究過渡模式的控制器設計對實現全包線飛行具有非常重要的意義。
當前,高速直升機過渡模式是國內外的研究熱點。文獻[2]提出了基于指數權重分配的鴨式旋翼/固定翼飛機的過渡模式控制律設計方法,并經過仿真驗證過渡模式的位置、姿態的穩定性。文獻[3]提出了一種基于飽和關聯lyapunov設計的非線性控制策略,利用該控制律可以在保持飛機飛行高度的同時進行過渡機動。文獻[4]采用一種基于李雅普諾夫理論及李雅普諾夫指數趨近律的滑模變結構控制算法提高過渡模式的穩定性,通過試驗驗證了該控制算法具有更高的魯棒性和穩態控制精度。
本文采用自適應PID控制應用于復合式高速直升機過渡模式,建立高速直升機氣動模型,利用改進的操縱分配方法,結合自適應PID控制器保證過渡模式的安全性和穩定性。
1 復合式高速直升機建模
1.1 樣機基本構型
復合式高速直升機采用共軸雙旋翼和推進螺旋槳的布局形式,具有直升機和固定翼飛機兩種操縱機構。與帶機翼的高速直升機不同的是,本文研究對象不設機翼而把機身作為高速飛行的主要升力部件,不足部分由共軸雙旋翼提供,同時由推進螺旋槳提供高速前飛動力。
由于其操縱機構的特殊性,復合式高速直升機在3種飛行模式下的操縱系統也有所區別。通過控制總距、差動總距和縱橫向周期變距實現低速模式飛行,通過控制升降舵偏轉角、差動偏轉角、方向舵偏轉角和螺旋槳槳距來實現高速模式飛行。在過渡模式下,低速模式操縱機構和高速模式操縱機構均參與操縱分配,由旋翼和機身共同提供復合式高速直升機前飛所需的升力,配合操縱量變化,實現過渡模式飛行。
1.2 動力學模型
復合式高速直升機動力學模型包括上旋翼、下旋翼、機身、平尾和升降舵、垂尾、方向舵及推進螺旋槳。
1)旋翼氣動力
與常規直升機相比,復合式高速直升機的上、下兩副旋翼轉速相同但轉向相反,雙旋翼之間氣動干擾嚴重,氣動特性難度分析較大[5]。雙旋翼氣動力模型采用葉素理論建模,計算得到上、下旋翼在機體軸系下的力和力矩的分量為:
(1)
(2)
式中:下標1表示上旋翼,下標2表示下旋翼;H、T、S、Mk分別為雙旋翼的拉力、側向力、后向力和轉矩;MG、LG分別為俯仰、滾轉力矩;x、y、z為旋翼槳轂中心到機身質心的相對距離;δ為旋翼前傾角。
2)機身氣動力
文獻[6]采用氣動系數計算機身氣動力和力矩,這里分別用CDf、CLf、CSf、Cφf、Cψf、Cθf表示機身阻力系數、升力系數、側力系數、滾轉力矩系數、偏航力矩系數和俯仰力矩系數。機身氣動力與力矩為:
(3)
式中:lf為機身長度;qf為機身來流動壓;Af為機身截面積。
3)平尾和升降舵氣動力
平尾的升力和阻力分別表示為
(4)
式中:qh為來流動壓;kh為平尾動壓損失系數;Clh為平尾升力系數,是與平尾迎角、升降舵偏轉角有關的函數;Cdh為平尾阻力系數,是與平尾迎角、平尾來流速度有關的函數;Ah為平尾截面積。
升降舵的升力可表示為
(5)

4)垂尾和方向舵氣動力
垂尾的升力和阻力可由垂尾處的速度、迎角計算得到
(6)
式中:qv為來流動壓;kv為平尾動壓損失系數;Clv為垂尾升力系數,是與垂尾迎角、方向舵偏轉角有關的函數;Cdv為垂尾阻力系數,是與垂尾迎角、來流速度有關的函數;Av為垂尾截面積。
方向舵產生的升力可表示為
(7)

5)推進螺旋槳氣動力
復合式高速直升機處于高速模式時,由推進螺旋槳提供前飛的推動力。推進螺旋槳在機體軸系下的力和力矩表示為:
(8)
式中:ρ為空氣密度;rp為螺旋槳半徑;Ωp為推進螺旋槳轉速;kpp為推進螺旋槳拉力系數;ktp為推進螺旋槳反轉矩系數;xp、yp、zp為推進螺旋槳槳轂中心在機體系下的坐標。
2 過渡模式操縱分配方法
復合式高速直升機的操縱機構在過渡模式不同時刻效率也不同。以低速模式向高速模式過渡為例,隨著速度增加低速模式操縱機構效率降低,高速模式操縱機構效率提高。根據操縱量效率值,將過渡區間定為40~50m/s。在過渡模式中,所有操縱舵面同時參與操縱,操縱舵面的增加造成耦合更加嚴重,控制難度更大。文獻[7]提出了線性過渡和功率最小優化過渡方案,本文在此基礎上提出基于直升機操穩性和推進功率最優的分配方法。
以低速模式向高速模式過渡為例,過渡模式開始瞬間旋翼后倒角最大,這里記α1,max、α2,max為上、下旋翼最大后倒角。綜合考慮線性過渡和功率最小優化方案,將操縱量變為旋翼后倒角參數,即可得到基于雙旋翼后倒角約束的操縱分配方法。
(9)
(10)
式中:μ0、μ、μ1分別為過渡模式開始瞬間、過渡過程中和過渡模式結束瞬間的復合式高速直升機前進比。
在速度<40m/s時,直升機低頭加速前飛,過渡模式開始瞬間俯仰角記為θmin。在過渡過程中讓飛機線性抬頭,縱向周期變距也要相應降低。同理,得到基于推進螺旋槳功率最優的過渡方法。
(11)
(12)
式中:B1s、B1e分別表示過渡模式開始、結束瞬間縱向周期變距配平值。通過式(9)-式(12)即實現了過渡模式控制分配。
3 過渡模式控制器設計
過渡模式控制器是復合式高速直升機的設計難點,也是實現全包線飛行最重要的一環。本文采用自適應PID方法設計復合式高速直升機過渡模式控制器,按上節設計的分配方法分配各操縱量,實現低速模式操縱量和高速模式操縱量的淡入淡出。
3.1 控制律設計
1)縱向控制律
過渡模式的俯仰姿態控制律由俯仰姿態偏差產生的縱向周期變距和高度變化產生的升降舵舵量兩部分組成。俯仰姿態控制系統如圖1所示。

圖1 過渡模式俯仰姿態控制系統
過渡模式的俯仰姿態控制律為:
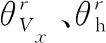
過渡模式前飛速度主要由機體俯仰姿態和推進螺旋槳控制。前飛速度控制系統如圖2所示。
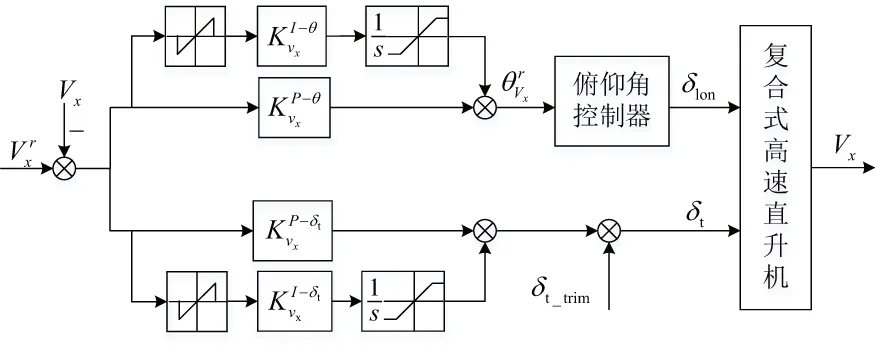
圖2 過渡模式前飛速度控制系統
過渡模式速度控制律為:

高度回路主要由主旋翼總距和機身俯仰姿態產生的升力控制,高度控制系統如圖3所示。

圖3 過渡模式高度控制系統
過渡模式的高度控制律為:



2)橫側向控制律
過渡模式下對滾轉姿態控制通過橫向周期變距和差動平尾實現,滾轉姿態控制系統如圖4所示。

圖4 過渡模式滾轉姿態控制系統
過渡模式滾轉姿態控制律為:


式中:φr為滾轉角指令;δlat_trim為橫向周期變距配平值;δa_trim為升降舵差動偏轉角配平值。控制器的比例積分和阻尼系數隨前飛速度自適應調整。
航向控制主要由雙旋翼的差動總距、機身滾轉和方向舵偏轉實現,航向控制系統如圖5所示。
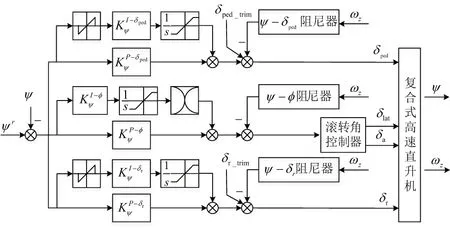
圖5 過渡模式航向控制系統
過渡模式航向控制律為:

δr_trim

3.2 控制器參數自適應調整策略
本文根據復合式高速直升機在過渡模式不同速度對應的不同舵效設計自適應調整參數策略。以速度通道為例,過渡模式速度區間為40~50m/s。隨著速度提升,尾部推進螺旋槳的舵效上升,縱向周期變距的效率降低,根據二者的關系計算推進螺旋槳和縱向周期變距控制通道的分配系數。
(13)
式中:λδt為推進螺旋槳通道的分配系數;λδlon為縱向周期變距通道的分配系數;?M(V)/?δt表示當前時刻的推進螺旋槳舵效;?M(Vs)/?δt表示過渡模式開始時刻推進螺旋槳舵效;?M(Ve)/?δt表示過渡模式結束時刻推進螺旋槳舵效。
過渡過程中縱向周期變距控制通道分配系數降低,推進螺旋槳控制通道分配系數逐漸增加,最終完全由推進螺旋槳控制前飛速度。由此可以得到自適應參數,即推進螺旋槳控制通道的比例、積分系數。
(14)

3.3 仿真試驗驗證
復合式高速直升機在高度100m、前飛速度40m/s的穩定飛行條件下,給定高速模式最小前飛速度50m/s的斜坡信號,仿真結果如圖6-圖10所示。
圖6 縱向速度仿真曲線
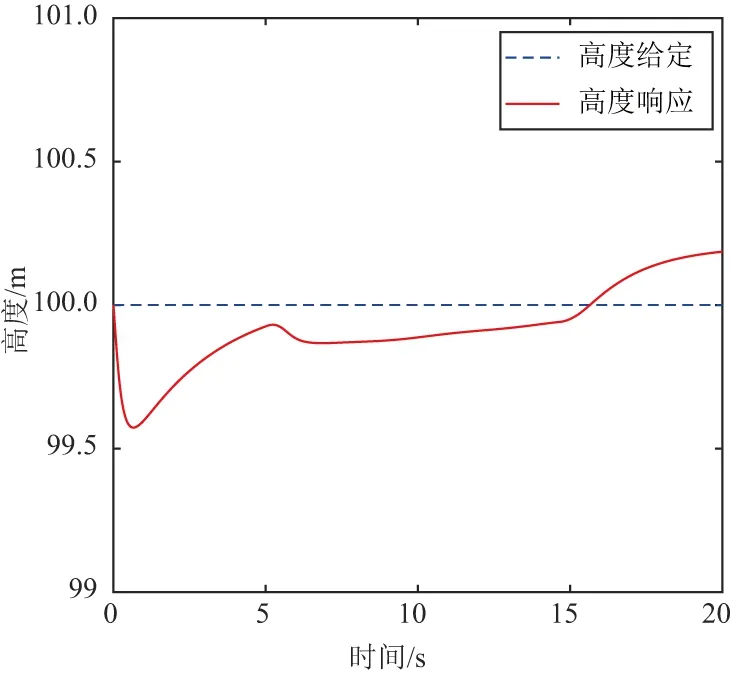
圖7 高度仿真曲線
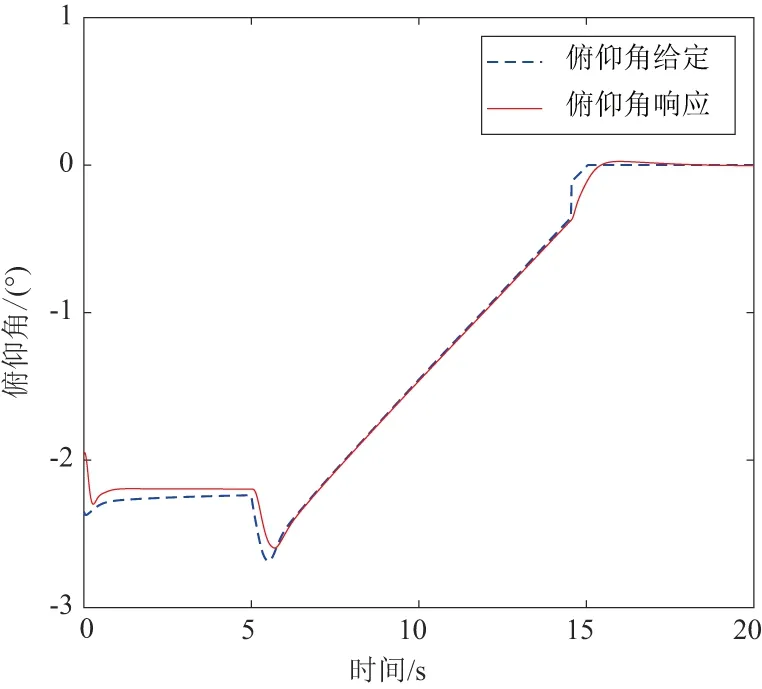
圖8 俯仰角仿真曲線
從以上圖中可以看出,縱向速度響應迅速,高度誤差保持在0.5m以內,且俯仰角姿態保持良好。從低速模式操縱量和高速模式操縱量仿真曲線可以看出,在過渡前期,低速模式操縱機構占主導地位;隨著速度的提升進入過渡模式后期,俯仰姿態逐漸回到0°,高速模式操縱機構占主導地位。因此,本文設計的復合式高速直升機過渡模式自適應PID控制器達到了預期的效果,保證了高速直升機過渡飛行的平穩性。

圖9 直升機操縱仿真曲線
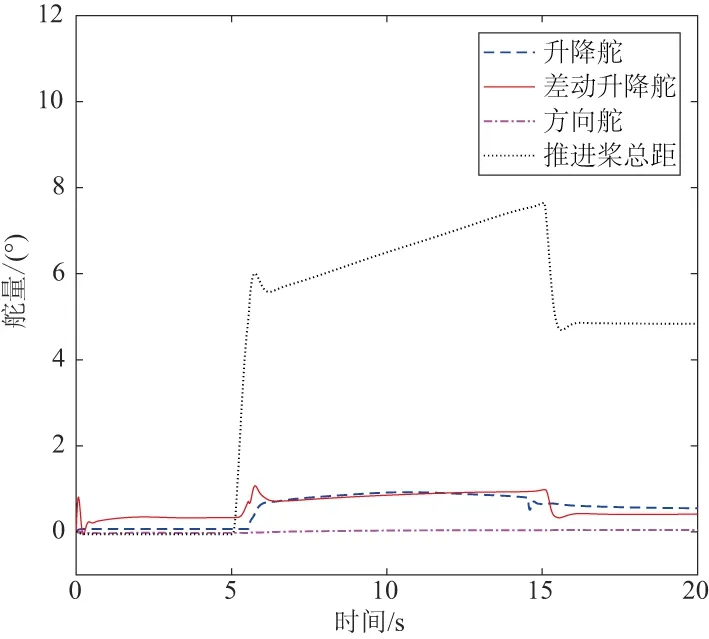
圖10 飛機操縱量仿真曲線
4 結語
本文主要研究了復合式高速直升機過渡模式的操縱特性,提出基于操穩性和推進功率最優的控制分配方法,設計過渡模式自適應PID控制器。仿真驗證該控制器能夠保證復合式高速直升機平穩、快速地完成低速模式與高速模式的切換,過渡過程中直升機姿態保持良好,指令跟蹤迅速,為后期工程應用奠定了良好基礎。
猜你喜歡
科學技術與工程(2023年33期)2023-12-15 05:29:18
中國科技縱橫(2022年9期)2022-05-24 03:01:18
直升機技術(2021年4期)2022-01-12 13:18:12
民用飛機設計與研究(2019年4期)2019-05-21 07:21:30
中國設備工程(2019年6期)2019-04-26 02:39:52
教練機(2018年3期)2018-11-29 06:52:24
直升機技術(2018年3期)2018-10-09 10:44:12
看世界(2018年10期)2018-05-25 04:53:40
大飛機(2018年1期)2018-05-14 15:59:08
航空維修與工程(2017年10期)2017-07-02 07:34:32
