基于條紋圖相位匹配的立體測量技術(shù)研究
2021-02-28 07:30:09朱榮剛張敏濤朱霞陳鵬
現(xiàn)代信息科技 2021年16期
關(guān)鍵詞:機(jī)器視覺
朱榮剛 張敏濤 朱霞 陳鵬

摘? 要:基于多相機(jī)機(jī)器視覺的三維測量技術(shù),需要在被測物體表面尋找特征點,根據(jù)特征點在各相機(jī)中圖像位置的不同來確定其在空間中的三維坐標(biāo)。如果被測物體特征點不明顯,又或者較少的話,需要人為粘貼標(biāo)記點。因此,測量結(jié)果的分辨率不高、測量過程也比較煩瑣。通過條紋投影給被測空間添加二維相位分布,以此來實現(xiàn)對被測物體連續(xù)的特征點標(biāo)記將能夠解決上述問題。文章詳細(xì)介紹了該技術(shù)中的相機(jī)標(biāo)定、全局相位求解以及面形復(fù)原全過程,可為機(jī)器視覺在三維測量中的應(yīng)用提供借鑒。
關(guān)鍵詞:三維測量;相位測量;條紋投影;機(jī)器視覺
中圖分類號:TP391? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識碼:A文章編號:2096-4706(2021)16-0093-04
Research on Stereo Measurement Technology Based on Fringe Pattern
Phase Matching
ZHU Ronggang, ZHANG Mintao, ZHU Xia, CHEN Peng
(College of Network and Communication Engineering, Jinling Institute of Technology, Nanjing? 211169, China)
Abstract: 3D measurement technology based on multi camera machine vision needs to find feature points on the surface of the measured object. According to the image position corresponding to the feature point in different cameras, the spatial three-dimensional coordinates of the feature point are determined. If the feature points of the measured object are not obvious or there are few feature points, it is necessary to manually paste the marked points as the feature points. Therefore, the resolution of the measurement results is not high, and the measurement process is cumbersome. The two-dimensional phase distribution is added by projecting the fringe pattern to the measured space. In order to realize the continuous feature point marking of the measured object, the above problems can be solved. This paper introduces the whole process of camera calibration, global phase solution and surface shape restoration in detail. It provides a reference for the application of machine vision in three-dimensional measurement.
Keywords: three dimensional measurement; phase measurement; fringe projection; machine vision
0? 引? 言
基于多相機(jī)的三維測量技術(shù),是基于視差原理并利用成像設(shè)備從不同的位置獲取被測物體的多幅圖像,通過計算圖像對應(yīng)點間的位置偏差,來獲取物體三維幾何信息的方法。這種方法具有結(jié)構(gòu)簡單、效率高和成本低等優(yōu)點。適合在線、非接觸監(jiān)測的應(yīng)用場景。因此,近年來許多學(xué)者對此進(jìn)行了大量研究[1-3]。其中,多數(shù)工作集中在對測量系統(tǒng)的數(shù)學(xué)建模、系統(tǒng)的標(biāo)定方法[4,5]以及目標(biāo)特征點匹配算法[6]的研究上,這里又以特征點匹配最為關(guān)鍵,直接影響測量結(jié)果的準(zhǔn)確性和精確性。因此,本文將采用條紋投影的方法,通過空間相位的唯一性,實現(xiàn)準(zhǔn)確匹配,來提高測量精度。
1? 原理
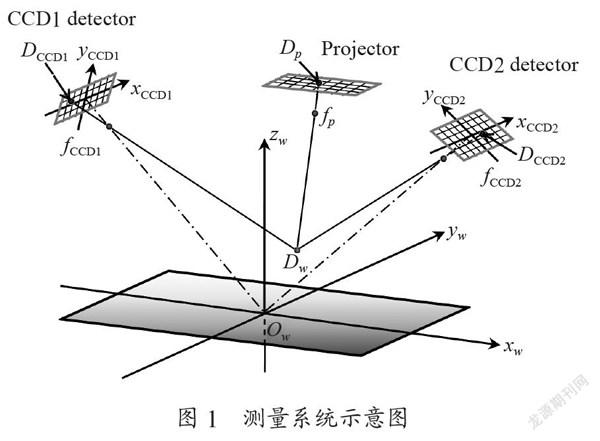
這里以雙相機(jī)條紋投影三維測量為例。如圖1所示,其包含條紋投影裝置和兩套圖像采集裝置,其中,條紋投影裝置用來對被測空間投影條紋圖,圖像采集裝置則負(fù)責(zé)采集由物體高度調(diào)制后的變形條紋圖。通過分析兩個圖像中每個像素點的相位分布,結(jié)合相機(jī)本身在世界坐標(biāo)系中的位置,便可確定對應(yīng)被測點的空間位置。
1.1? 相機(jī)標(biāo)定
相機(jī)標(biāo)定的作用是將相機(jī)圖像坐標(biāo)系統(tǒng)一到被測空間的世界坐標(biāo)系中。相機(jī)標(biāo)定包含內(nèi)參標(biāo)定與外參標(biāo)定兩個部分。為了簡化測量模型、提高標(biāo)定速度,選取高質(zhì)量的相機(jī)和消畸變鏡頭,此時相機(jī)內(nèi)參的標(biāo)定可簡化為如圖2所示的針孔模型。
相機(jī)坐標(biāo)系中任意一點D(xc,yc,zc)成像于相機(jī)靶面圖像坐標(biāo)系u-v中(u,v)點上,而D(xc,yc,zc)是由世界坐標(biāo)系中的點(xw,yw,zw)經(jīng)過(R,T)變換而來,最終關(guān)系可表示為:
(1)
其中,P11~P34是需要標(biāo)定的相機(jī)參數(shù)。
1.2? 三維測量
測量過程主要包括條紋投影、相位求解以及面形恢復(fù)幾個過程。其中,投射何種樣式的條紋圖是由相位求解算法來確定,面形恢復(fù)則是根據(jù)前面標(biāo)定結(jié)果以及求解出的相位最終求得。具體過程如以下所示。
1.2.1? 條紋投影
測量過程中,我們采用投影正弦條紋的方法,由于正弦條紋在求解相位的時候能夠去除背景噪聲等對測量的影響,提高測量精度。另外,要實現(xiàn)被測物體空間各點的無歧義特征點匹配,需要在投影儀坐標(biāo)系中的x方向與y方向分別投影條紋圖。
1.2.2? 相位求解
相位求解我們采用傳統(tǒng)的四步移相法,假設(shè)背景光強(qiáng)為I0(x,y),調(diào)制度為γ0(x,y),則采集到的投影條紋的光強(qiáng)表示為:
(2)
其中,φ(x,y)為需求相位,包含面型信息。φk(x,y)是可變相位,分別取0、π/2、π和3π/2,對應(yīng)光強(qiáng)為I0(x,y)~I(xiàn)3(x,y),則有:
(3)
測量過程中我們需要實現(xiàn)相位的無歧義求解,最直接的方法是投影單周期條紋,也即此時λ=1。但是,實際測量過程中由于Gamma效應(yīng)等各因素,測量精度通常隨著條紋頻率增加而提高,可以采用外差法來解決該問題。外差法[7]是指兩種不同頻率的相位函數(shù)φ1(x,y)和φ2(x,y)疊加得到一種頻率更低的相位函數(shù)φb(x,y),λ1、λ2和λb分別為相位函數(shù)φ1(x)、φ2(x)和φb(x)對應(yīng)的頻率,φb(x)的頻率λb經(jīng)過計算后可表示為:
(4)
為了在全場范圍內(nèi)無歧義地進(jìn)行相位展開,必須選擇合適的λ1和λ2值,使得λb≥1。
1.2.3? 面形恢復(fù)
面形恢復(fù)過程如圖3所示,選取CCD1中任意被測點PCCD1,測得其相位值(φx,φy),通過相位匹配可以獲得其在與CCD1中的像素點位置PCCD2,再連接各自相機(jī)中心fCCD1和PCCD2,理論上fCCD1PCCD1和fCCD2PCCD2的交點位置Pw就是所需測量的空間位置。但是由于標(biāo)定過程中多少會引入一定的誤差,導(dǎo)致其未必相交,因而無法得到空間位置。根據(jù)公式(1),Pw(xw,yw,zw)為所求空間位置點,其即滿足CCD1的坐標(biāo)轉(zhuǎn)換關(guān)系,也滿足CCD2的坐標(biāo)轉(zhuǎn)換關(guān)系,聯(lián)立得到如下方程組:
(5)
可以通過最小二乘法求解空間位置Pw(xw,yw,zw),多相機(jī)的模式下會增加方程組數(shù)量,求解更加精確,但是同時計算速度也會更慢。
2? 實驗
實驗中采用的相機(jī)是微視MVC1450m相機(jī),像素為1 390×1 040,投影器選取帶PLD芯片的Benq MX503,像素為1 024×768。
2.1? 標(biāo)定
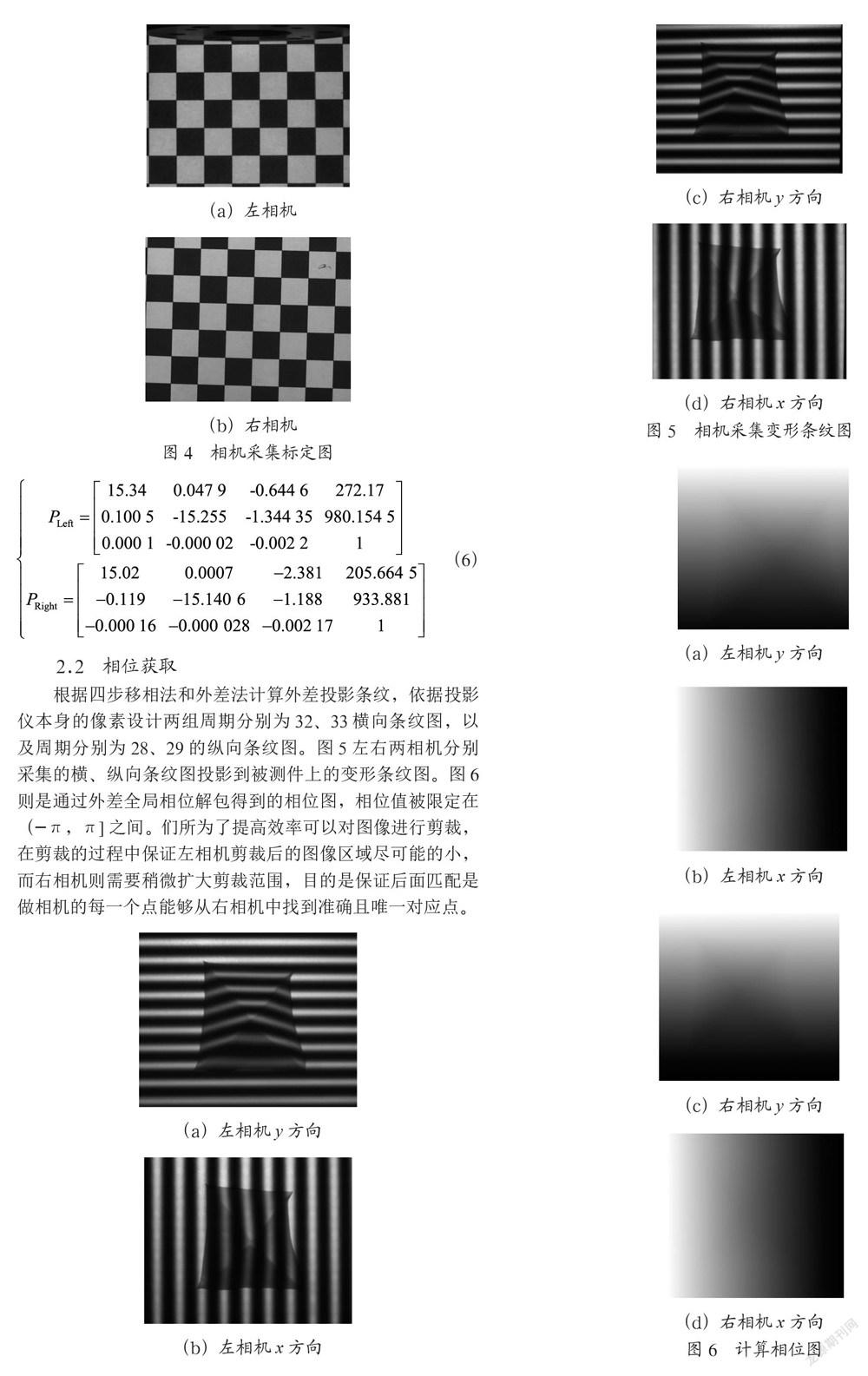
根據(jù)公(1),通過標(biāo)定板上已知點的空間位置和對應(yīng)的圖像位置來標(biāo)定相機(jī)。圖4是左右相機(jī)分別拍攝一副標(biāo)定板后得到的圖像,上面棋盤格的交點位置表示著圖像位置。
為了達(dá)到精確的目的,不斷按照設(shè)定高度升降標(biāo)定板并采集,實驗中通過計算得到左、右相機(jī)的標(biāo)定矩陣分別是:
(6)
2.2? 相位獲取
根據(jù)四步移相法和外差法計算外差投影條紋,依據(jù)投影儀本身的像素設(shè)計兩組周期分別為32、33橫向條紋圖,以及周期分別為28、29的縱向條紋圖。圖5左右兩相機(jī)分別采集的橫、縱向條紋圖投影到被測件上的變形條紋圖。圖6則是通過外差全局相位解包得到的相位圖,相位值被限定在(-π,π]之間。們所為了提高效率可以對圖像進(jìn)行剪裁,在剪裁的過程中保證左相機(jī)剪裁后的圖像區(qū)域盡可能的小,而右相機(jī)則需要稍微擴(kuò)大剪裁范圍,目的是保證后面匹配是做相機(jī)的每一個點能夠從右相機(jī)中找到準(zhǔn)確且唯一對應(yīng)點。
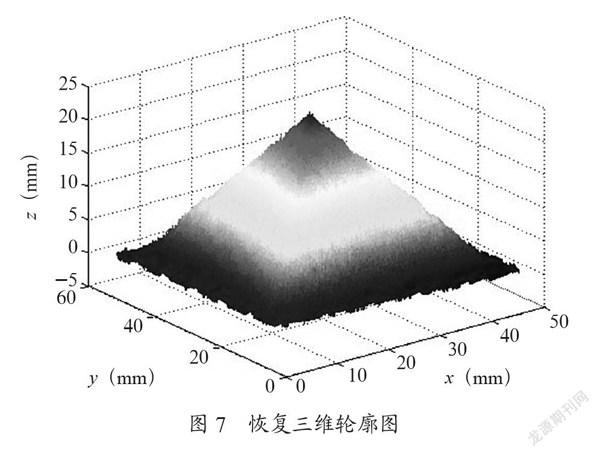
2.3? 面形恢復(fù)
根據(jù)式(5)和圖6相位的二維分布,最終復(fù)原的被測物體三維輪廓如圖7所示,與實際相吻合。
3? 結(jié)? 論
本文通過相位匹配的方法來進(jìn)行特征匹配,實現(xiàn)多相機(jī)機(jī)器視覺的三維立體測量。實驗結(jié)果表明,該方法與傳統(tǒng)的機(jī)器視覺三維測量方法相比,其能夠?qū)崿F(xiàn)全部可探測像素點的完全匹配,進(jìn)而可以實現(xiàn)完整的面形恢復(fù)。未來,可以在相機(jī)標(biāo)定、亞像素級計算以及快速相位匹配等方面提升該測量方法的性能。
參考文獻(xiàn):
[1] 張業(yè)鵬,何濤,文昌俊,等.機(jī)器視覺在工業(yè)測量中的應(yīng)用與研究 [J].光學(xué)精密工程,2001(4):324-329.
[2] 楊洪濤,何海雙,李莉,等.雙目立體視覺測量系統(tǒng)的精度分析 [J].傳感器與微系統(tǒng),2020,39(10):58-61+69.
[3] 隋婧,金偉其.雙目立體視覺技術(shù)的實現(xiàn)及其進(jìn)展 [J].電子技術(shù)應(yīng)用,2004,30(10):4-6+12.
[4] 鄧小峰,姚睿,周翟和,等.工業(yè)自動化產(chǎn)品質(zhì)檢中機(jī)器視覺系統(tǒng)標(biāo)定方法研究 [J].測控技術(shù),2014,33(3):144-147.
[5] 蔡健榮,趙杰文.雙目立體視覺系統(tǒng)攝像機(jī)標(biāo)定 [J].江蘇大學(xué)學(xué)報(自然科學(xué)版),2006,27(1):6-9.
[6] 裴志軍,陶建華.一種基于梯度特征列表的機(jī)器視覺目標(biāo)匹配 [J].計算機(jī)工程與應(yīng)用,2008(5):14-16+21.
[7] 王從軍,周鋼,李中偉,等.一種三頻外差相移解相方法:200710052902.X [P].2007-08-02.
作者簡介:朱榮剛(1984.01—),男,漢族,江蘇大豐人,講師,博士研究生,研究方向:光學(xué)測量和圖形處理。
猜你喜歡
軟件導(dǎo)刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(shù)(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導(dǎo)刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
