基于行程時(shí)間的駕駛風(fēng)格貝葉斯決策樹動態(tài)識別
2021-03-08 06:17:06張洪賓于祥閣陳慈李夢琦
張洪賓,于祥閣,陳慈,李夢琦
(山東理工大學(xué) 交通與車輛工程學(xué)院,山東 淄博 255049)
隨著機(jī)動車數(shù)量的增加,交通安全問題日益突出。駕駛員因素是影響交通安全的重要因素之一,也是誘發(fā)交通事故的主要原因。駕駛員因素包括心理、生理以及駕駛行為風(fēng)格,生理因素是心理因素的物質(zhì)基礎(chǔ),并體現(xiàn)在心理特征上,而心理特征又直接影響人的行為風(fēng)格[1-2]。駕駛風(fēng)格是駕駛員對實(shí)際交通狀況的態(tài)度、心理特征以及決策偏好,反映了駕駛員在車輛運(yùn)行期間的行為表現(xiàn)。對于駕駛員來說,環(huán)境信息的識別和處理,即駕駛員的行為風(fēng)格,是心態(tài)和情緒的影響結(jié)果[3-4];因此,研究駕駛風(fēng)格動態(tài)識別,提高車輛安全預(yù)警及行駛安全性,對降低交通事故的發(fā)生率具有重要意義。
國內(nèi)外學(xué)者對駕駛風(fēng)格的分類識別進(jìn)行了一定研究。Constantinescu等[5]應(yīng)用主成分分析和層次聚類分析來分類和識別駕駛風(fēng)格;Aljaafreh等[6]設(shè)計(jì)了一個(gè)模糊推理系統(tǒng),通過使用在一定時(shí)間窗口內(nèi)的車輛縱向加速度和橫向加速度歐式范數(shù)以及平均車速進(jìn)行駕駛風(fēng)格的識別;Guo等[7]分析了不同行駛周期下的加速踏板開度及其變化率,并建立了模糊邏輯識別器來識別行駛方式;Yan等[8]提出了一種基于客觀駕駛數(shù)據(jù)和腦電圖數(shù)據(jù)的方法對駕駛風(fēng)格進(jìn)行分類;張敬磊等[9]從汽車安全輔助駕駛系統(tǒng),特別是主動安全預(yù)警系統(tǒng)中汽車駕駛員意圖、情感及其關(guān)聯(lián)耦合作用等心理、意識計(jì)算問題出發(fā),對駕駛風(fēng)格問題進(jìn)行了探索性研究;吳振昕等[10]基于大數(shù)據(jù)通過D-S證據(jù)理論決策融合的方法建立了駕駛風(fēng)格識別模型;黃麗蓉[11]基于駕駛員行為數(shù)據(jù),采用深度信念網(wǎng)絡(luò)算法對駕駛風(fēng)格進(jìn)行識別;李立治等[12]利用k-means、模糊均值、層次聚類3種方法對駕駛風(fēng)格進(jìn)行分類;徐丹等[13]利用卷積神經(jīng)網(wǎng)絡(luò)對駕駛員的駕駛行為進(jìn)行識別,其識別率達(dá)到了97.13%。
駕駛風(fēng)格演變是駕駛員在時(shí)變動態(tài)環(huán)境中精神狀態(tài)的反映。駕駛風(fēng)格的演變過程無法方便、直接且準(zhǔn)確地測量,只能在駕駛期間基于相關(guān)信息間接推算獲得。已有關(guān)于駕駛風(fēng)格的研究主要集中在駕駛員個(gè)性分析、駕駛員意圖識別以及情感對駕駛行為的影響,關(guān)于駕駛風(fēng)格演變的動態(tài)識別研究較少。本文從車輛主動安全預(yù)警技術(shù)角度出發(fā),以駕駛風(fēng)格為研究對象,利用汽車的行程時(shí)間作為特征參數(shù),提出一種新的基于貝葉斯決策樹的駕駛風(fēng)格動態(tài)識別方法,并設(shè)計(jì)相應(yīng)的心理測試、實(shí)車實(shí)驗(yàn)以及模擬駕駛實(shí)驗(yàn)對該方法的準(zhǔn)確性進(jìn)行驗(yàn)證。
1 貝葉斯決策樹
1.1 決策樹
決策樹分類是常用的歸納分類算法,它采用從上到下的遞歸方法,對比決策樹內(nèi)部節(jié)點(diǎn)屬性值,依據(jù)不同屬性值判斷節(jié)點(diǎn)分支,能夠從一組無序、不規(guī)則的情形中推斷出分類規(guī)則。
1.2 貝葉斯決策樹簡介
貝葉斯節(jié)點(diǎn)[14]是貝葉斯決策樹添加到原始決策樹一個(gè)新節(jié)點(diǎn),它位于兩個(gè)屬性測試節(jié)點(diǎn)之間,通過貝葉斯原理進(jìn)行函數(shù)計(jì)算,有此節(jié)點(diǎn)的決策樹稱為貝葉斯決策樹(結(jié)構(gòu)見圖1)。
從上往下理順基層常態(tài)化工作體制、人員編制和經(jīng)費(fèi)支持,明確基層專門工作部門、專職人員和經(jīng)費(fèi)預(yù)算。在工商、質(zhì)監(jiān)、食藥監(jiān)“三合一”以及知識產(chǎn)權(quán)、物價(jià)“五合一”,甚至商務(wù)執(zhí)法、鹽業(yè)執(zhí)法“七合一”的市場監(jiān)管體制改革背景下,全國范圍內(nèi)將領(lǐng)導(dǎo)小組辦公室統(tǒng)一至市場監(jiān)督管理部門,作為獨(dú)立機(jī)構(gòu),通過三定方案、崗位責(zé)任和權(quán)責(zé)清單固定下來,形成條塊結(jié)合的良好行政管理體系,從而激發(fā)打擊侵權(quán)假冒工作的管理動力,增強(qiáng)打擊侵權(quán)假冒工作的管理活力,提高打擊侵權(quán)假冒工作的管理效力,提升打擊侵權(quán)假冒工作的管理能力。

圖1 貝葉斯決策樹結(jié)構(gòu)示意圖Fig.1 Structure diagram of Bayesian decision tree
由圖1可知,貝葉斯節(jié)點(diǎn)的取值是0或f。0表示此貝葉斯節(jié)點(diǎn)不用計(jì)算,可以依據(jù)條件轉(zhuǎn)到下個(gè)測試節(jié)點(diǎn);f表示需依據(jù)貝葉斯原理使用先驗(yàn)概率計(jì)算后驗(yàn)概率進(jìn)行分類。
1.3 貝葉斯決策樹算法
1)對于能用信息增益方法確切選擇某個(gè)屬性的分支,選取0值。信息增益值Gain(A)的計(jì)算方法[15]如下:
Gain(A)=∑((s1j+…+smj)/|S|)·
∑(sij/|Sj|lb(sij/|Sj|))-
∑si/|S|lb(si/|S|),
(1)
令pi=si/|S|,pij=sij/|Sj|,則
Gain(A)=∑((s1j+…+smj)/|S|)·
∑pijlb(pij)-∑pilb(pi),
(2)
式中:S為數(shù)據(jù)樣本的集合,將S的數(shù)據(jù)樣本分到m個(gè)不同類別Ci(i=1,2,…,m)中;si為Ci的樣本個(gè)數(shù);Sj(j=1,2,…,v)為用屬性A(屬性A具有v個(gè)不同的值{a1,a2,…,av})將S劃分出的子集;sij是子集Sj中類Ci的樣本數(shù)。
設(shè){X1,X2,…,Xn}為一個(gè)待分類數(shù)據(jù)集,每個(gè)Xi具有一個(gè)或多個(gè)屬性Xij(i=1,2,…,n;j=1,2,…,m);Lj(j=1,2,…,k)為劃分的類別。按某種原則對Xi進(jìn)行分類,若Xi無法確定分到某一類別,而是和某些類均相關(guān),則根據(jù)先驗(yàn)信息P(Lj)先把它放入某一類,再根據(jù)計(jì)算出的P(Xi|Lj)和P(Xi)來計(jì)算后驗(yàn)概率;如果依據(jù)Xi的m個(gè)屬性進(jìn)行分類,且屬性間是獨(dú)立的,則將Xi劃分為Xi1、Xi2、…、Xim,則P(Xi|Lj)可表示為
P(Xi|Lj)=P(Xi1|Lj)×P(Xi2|Lj)×
…×P(Xim|Lj)。
(3)
所以,可以計(jì)算出后驗(yàn)概率為
(4)
2 駕駛風(fēng)格動態(tài)辨識模型
2.1 實(shí)驗(yàn)設(shè)計(jì)
1)心理測試
在心理測試的實(shí)驗(yàn)中,隨機(jī)調(diào)查50名車輛駕駛員,使用心理問卷[16]對50名車輛駕駛員進(jìn)行一場測試,依據(jù)心理測試結(jié)果判斷所調(diào)查車輛駕駛員的靜態(tài)駕駛風(fēng)格的類型,并對這些類型進(jìn)行分類。由于篇幅有限,只列出部分問卷調(diào)查表和問卷調(diào)查結(jié)果(見表1和表2)。
2)實(shí)車實(shí)驗(yàn)
(1)實(shí)驗(yàn)設(shè)備
如圖2所示,在實(shí)車實(shí)驗(yàn)中所使用的設(shè)備有SG299-GPS非接觸多功能測試儀、便攜式生理信號測量儀、激光測距傳感器等。
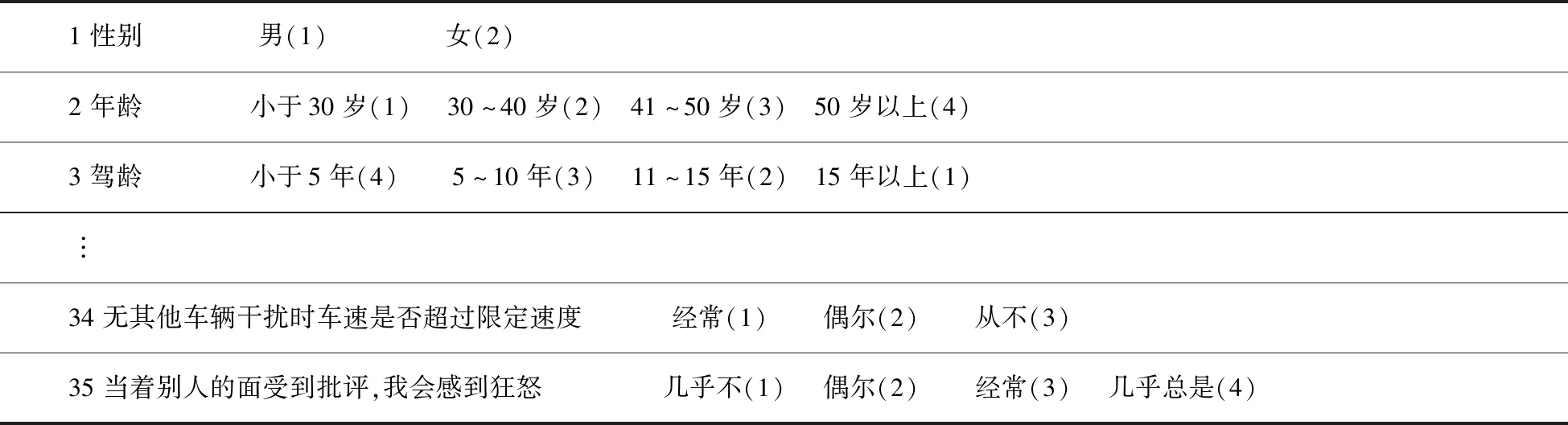
表1 靜態(tài)駕駛風(fēng)格調(diào)查問卷Tab.1 Static driving style questionnaire

表2 駕駛傾向性類型得分情況Tab.2 Score list of driver propensity type

圖2 交通信息采集系統(tǒng)組成Fig.2 Composition of traffic information collection system
(2)實(shí)驗(yàn)條件
為了便于研究和獲得實(shí)驗(yàn)數(shù)據(jù),在天氣晴朗和路面干燥的條件下進(jìn)行了實(shí)驗(yàn)。實(shí)驗(yàn)時(shí)間選擇在工作日進(jìn)行,實(shí)驗(yàn)時(shí)間段是8:30-10:30,選擇的道路交通繁忙但不擁堵。將50輛裝載GPS的出租車作為實(shí)驗(yàn)樣本。根據(jù)交通流定律,實(shí)驗(yàn)是在不影響原有交通流量的前提下進(jìn)行的。
(3)實(shí)驗(yàn)地點(diǎn)

圖3 實(shí)驗(yàn)路線Fig.3 Experimental route
選擇山東省淄博市的世紀(jì)路—新村西路—南京路—人民西路為實(shí)驗(yàn)路線,如圖3所示。兩標(biāo)記桿之間箭頭所示的部分是實(shí)驗(yàn)?zāi)繕?biāo)路線,標(biāo)記桿之間的相應(yīng)部分是研究的目標(biāo)部分,長度為245 m。根據(jù)實(shí)際場景中交叉口上游車道數(shù)變化的位置確定起始標(biāo)記位置,根據(jù)車輛離開交叉口的位置確定結(jié)束標(biāo)記位置。在實(shí)驗(yàn)過程中,配備交通信息采集儀器的車輛在給定路線上行駛,并記錄車輛通過起始標(biāo)記時(shí)的開始時(shí)間;當(dāng)通過結(jié)束標(biāo)記時(shí),記錄結(jié)束時(shí)間,從而獲得相應(yīng)路段的行程時(shí)間。在測試期間,車輛如果在兩個(gè)標(biāo)點(diǎn)桿之間停車,則記錄停車時(shí)間和再次出發(fā)時(shí)間。使用高清攝像頭、激光測距儀、GPS、陀螺儀等實(shí)驗(yàn)設(shè)備記錄目標(biāo)車輛及其內(nèi)部和外部環(huán)境信息。
(4)數(shù)據(jù)及分析
當(dāng)車輛行駛過交叉路口時(shí),由于信號燈控制,一些車輛受到阻滯;因此,需要先在測得的車輛行程時(shí)間中去除掉延誤時(shí)間,即從實(shí)際行駛時(shí)間中減去延遲時(shí)間。信號交叉口延誤包括三個(gè)部分:減速延誤、停車延誤和加速延誤。本文依據(jù)控制延誤(停車延誤與加、減速損失時(shí)間之和)來實(shí)現(xiàn)行程時(shí)間去除延誤的處理。具體計(jì)算步驟如下:
(a)某一實(shí)驗(yàn)車到達(dá)起點(diǎn)標(biāo)桿的時(shí)間記作t1,在實(shí)驗(yàn)?zāi)繕?biāo)路段某位置的停車時(shí)間為t2,停車后再出發(fā)時(shí)間為t3,到達(dá)終點(diǎn)標(biāo)桿的時(shí)間為t4。那么,該實(shí)驗(yàn)車在實(shí)驗(yàn)?zāi)繕?biāo)路段的總行程時(shí)間T=t4-t1,停車延誤時(shí)間ds=t3-t2。
(b)估算控制延誤dco=ds/0.77。依據(jù)美國通行能力手冊估算,其確認(rèn)停車延誤為控制延誤的77%。
(c)去除延誤之后的行程時(shí)間T′=T-dco。
對50輛實(shí)驗(yàn)車進(jìn)行多次重復(fù)實(shí)驗(yàn),共收集1 200組數(shù)據(jù),處理后的不同駕駛員的行程時(shí)間散點(diǎn)分布如圖4所示。

圖4 駕駛員行程時(shí)間數(shù)據(jù)散點(diǎn)圖Fig.4 Scatter plot of driver travel time
表3和圖5是利用上述散點(diǎn)數(shù)據(jù)進(jìn)行聚類分析的相關(guān)結(jié)果。

表3 最終聚類中心Tab.3 Final cluster center

圖5 駕駛員聚類散點(diǎn)圖Fig.5 Cluster scatter plot of driver
經(jīng)驗(yàn)證顯示,聚類分析確定的分類結(jié)果與心理測試結(jié)果基本一致。根據(jù)行程時(shí)間可將駕駛員分為三類:保守型、普通型和激進(jìn)型。這說明,可以使用行程時(shí)間作為參數(shù)來構(gòu)建合理的模型,從而實(shí)時(shí)識別和判斷駕駛員的行為風(fēng)格類型。
2.2 模型的建立
以貝葉斯決策樹理論為基礎(chǔ),依據(jù)駕駛員在特定實(shí)驗(yàn)路段的參數(shù),即經(jīng)過延誤處理后的行程時(shí)間T′,進(jìn)行駕駛員的行為風(fēng)格識別。將駕駛風(fēng)格分為三種類型:保守、普通和激進(jìn)。表4為用于識別駕駛員行為風(fēng)格的屬性表,圖6為貝葉斯決策樹。

表4 用于識別駕駛風(fēng)格的屬性表Tab.4 Property table for identifying driving style

圖6 駕駛風(fēng)格識別的貝葉斯決策樹Fig.6 Bayesian decision tree for driving style recognition
駕駛風(fēng)格識別的具體過程如圖7所示。訓(xùn)練樣本集是對應(yīng)于聚類數(shù)據(jù)中隨機(jī)選擇的30名駕駛員的實(shí)驗(yàn)數(shù)據(jù)樣本。

圖7 駕駛風(fēng)格識別流程圖Fig.7 Driving style recognition flow chart
3 模型驗(yàn)證
3.1 實(shí)車驗(yàn)證
利用剩余20名駕駛員的實(shí)驗(yàn)數(shù)據(jù)對模型進(jìn)行驗(yàn)證,表5為模型驗(yàn)證的結(jié)果,百分比表示20名參與模型驗(yàn)證的駕駛員有相應(yīng)的概率表現(xiàn)為該駕駛行為風(fēng)格。

表5 20名駕駛員實(shí)車驗(yàn)證結(jié)果Tab.5 Final verification results of 20 drivers
結(jié)果表明,僅考慮駕駛員出行時(shí)間時(shí),駕駛風(fēng)格識別準(zhǔn)確率均在70%以上,模型驗(yàn)證結(jié)果與心理測試結(jié)果基本一致。
3.2 模擬駕駛實(shí)驗(yàn)驗(yàn)證
在模擬駕駛實(shí)驗(yàn)中,使用配備日本FORUM8公司仿真軟件UC-Win road ver.10的駕駛模擬器(如圖8所示)進(jìn)行模擬。模擬駕駛實(shí)驗(yàn)所用的仿真軟件具有駕駛模擬功能,可設(shè)計(jì)不同的交通場景,模擬各種車型的多種行駛狀況。

圖8 駕駛模擬實(shí)驗(yàn)Fig.8 Driving simulation experiment
在實(shí)驗(yàn)中,所有參與實(shí)驗(yàn)驗(yàn)證的駕駛員需要在實(shí)驗(yàn)之前進(jìn)行駕駛模擬器的操作訓(xùn)練,最后通過模擬駕駛實(shí)驗(yàn)獲得相應(yīng)的實(shí)驗(yàn)數(shù)據(jù)以驗(yàn)證駕駛風(fēng)格識別模型的準(zhǔn)確率。
利用構(gòu)建的貝葉斯決策樹動態(tài)識別模型對所得駕駛模擬實(shí)驗(yàn)數(shù)據(jù)進(jìn)行處理,并將模型識別結(jié)果與心理測試結(jié)果進(jìn)行比較(表6)。

表6 模擬駕駛實(shí)驗(yàn)結(jié)果Tab.6 Simulation driving test results
由表6可以看出,所建立的模型在模擬駕駛實(shí)驗(yàn)中的識別結(jié)果與心理測試結(jié)果之間具有較高的擬合度。
4 結(jié)論
1)本文以貝葉斯決策樹分類方法為基礎(chǔ),建立了基于行程時(shí)間的駕駛風(fēng)格動態(tài)識別模型,通過實(shí)車道路實(shí)驗(yàn)數(shù)據(jù)以及駕駛模擬實(shí)驗(yàn)數(shù)據(jù)進(jìn)行的驗(yàn)證表明,其識別準(zhǔn)確率達(dá)到70%以上,模型驗(yàn)證結(jié)果與心理問卷測試結(jié)果基本一致。
2)本文提出的駕駛風(fēng)格動態(tài)識別方法具有較高的精度,可為實(shí)現(xiàn)以人為本的個(gè)性化車輛主動安全系統(tǒng)、特別是基于物聯(lián)網(wǎng)的車輛安全技術(shù)的實(shí)現(xiàn)提供參考和理論基礎(chǔ)。
3)受現(xiàn)有條件限制,研究中未考慮駕駛員的年齡、性別、駕齡及環(huán)境等因素引起的駕駛風(fēng)格變化,在今后將增加對這些特征參數(shù)的考慮,以便與本文提出的行程時(shí)間相結(jié)合,進(jìn)一步提高識別模型的準(zhǔn)確度,更深入地研究駕駛員的行為規(guī)律。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
汽車實(shí)用技術(shù)(2022年14期)2022-07-30 06:13:42
汽車實(shí)用技術(shù)(2022年4期)2022-03-07 06:07:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
