基于變結構多模型的SINS/DVL組合導航算法
2021-05-18 12:05:58王健成尹冬寒臧新樂奔粵陽趙玉新
導航定位與授時 2021年3期
關鍵詞:模型
李 倩,王健成,尹冬寒,臧新樂,奔粵陽,趙玉新
(1.哈爾濱工程大學智能科學與工程學院,哈爾濱 150001;2.中國船舶工業集團公司第七○八研究所,上海 201100)
0 引言
捷聯慣性導航系統(Strapdown Inertial Navigation System, SINS)是一種自主式導航系統,被認為是水下導航領域中最可靠的導航系統,在短時間內具有較高的導航精度。但是由于陀螺漂移和加速度計零偏的存在, 導致其誤差不斷積累,因此無法長時間單獨工作。對于水下環境,由于全球定位系統(Global Positioning System,GPS)信號會迅速衰減[1-3],因此常用多普勒計程儀(Doppler Velocity Log, DVL)輔助SINS為無人水下航行器提供精確的導航信息[4]。DVL有兩種工作模式:底跟蹤模式和水跟蹤模式。DVL一般工作在底跟蹤模式,將DVL提供的相對地面的速度與SINS融合,為載體提供精確的導航信息。然而,DVL受作用深度限制,在超過一定范圍時,DVL將工作在水跟蹤模式下,此時DVL只能為載體提供相對于水的速度。若將相對于水的速度作為相對地面的速度信息提供給卡爾曼濾波器(Kalman Filter, KF)對SINS的系統誤差進行估計,此時洋流速度會成為DVL的測量誤差,將導致SINS / DVL組合導航性能降低,甚至導航失敗[5-7]。
為了提高SINS/DVL組合導航系統的性能,文獻[8]提出了一種解決方案,將洋流速度建模為常數,考慮其對系統的影響,并將其增廣到KF的狀態量中, 基于長基線/超短基線(Long Baseline/Ultra-short Baseline, LBL/USBL)和DVL提供的位置和速度信息,采用KF估計洋流速度。文獻[9]采用模型輔助慣性導航系統對自主水下航行器(Autono-mous Underwater Vehicle, AUV)導航解算方法進行改進,該模型可以在線估計洋流速度參數,但需要提供精確的AUV動態模型以及外部定位信息。以上方法均需一些外部定位信息,而對于水下環境,連續的外部位置信息有時難以獲得。此外,簡單地將洋流速度建模為常數以補償DVL水跟蹤模式下的測量誤差,在短時間內有一定的效果,但不適用于長航時和廣海域環境。為了進一步降低洋流常值模型對SINS/DVL組合導航系統造成的影響,文獻[10]使用一階馬爾可夫過程來描述洋流速度的變化,并通過KF實時估算洋流速度,從而校正系統誤差。在很多情況下,一階馬爾可夫過程洋流速度模型中的相關時間常數會隨著季節、位置、鹽度和天氣條件等外部因素的變化而變化[11-12]。因此,單一的洋流速度模型往往無法表征其流速變化。
針對洋流速度模型的不確定性,文獻[13]利用交互式多模型(Interactive Multiple Model, IMM)算法估計洋流速度,以減小其對導航精度的影響。在該算法中,兩個KF在不同的洋流速度模型下并行運行,然后進行輸出融合,得到洋流速度的估計值。然而,在實際應用中,僅僅建立一個由兩個洋流速度模型組成的小模型群是不夠的。為了提高估計效果就要使用較大的模型群,這樣就會增大計算量,難以滿足導航系統的實時性要求[14]。同時,某些不必要的模型間會存在過度競爭的問題,而在狀態估計過程中利用太多的模型也會降低算法的性能[15]。
利用IMM算法進行組合導航時,一方面要保證模型群有足夠多的模型來覆蓋系統的實際模型;另一方面,為了保證計算速度,需要盡量使用較小的模型數量。顯然,這兩個要求是矛盾的。針對這一問題,1992年,X.Li和Y. Bar-Shalom提出了一種變結構多模型(Variable Structure Multiple Model, VSMM)方法[16-17]。在本文中,采用有向圖切換的變結構多模型(Digraph Switching-Variable Structure Multiple Model, DS-VSMM)算法來實時估計洋流速度。基于有向圖切換方法,設置洋流速度模型群,利用所設置的模型群切換策略對模型群進行激活和終止,使用較少的模型數量實現了洋流速度的準確估計,進而消除了其對SINS/DVL組合導航的影響[18]。
1 SINS/DVL組合導航系統模型建立
SINS/DVL組合導航系統誤差狀態方程為
(1)
式中,狀態變量X為14維列向量;狀態矩陣F為14×14維矩陣;系統噪聲輸入矩陣G和系統噪聲矩陣W為14維列向量。
X=[δLδλδvEδvNφxφyφz
ΔAxΔAyεEεNεUθCEθCN]T
(2)
式中,δL、δλ分別為緯度和經度誤差;δvE、δvN分別為東向和北向速度誤差;φx、φy、φz為平臺失準角;ΔAx、ΔAy分別為東向和北向加速度計零位偏移;εE、εN、εU分別為東向、北向和天向陀螺漂移;θCE、θCN分別為洋流的東向和北向速度。本文主要對洋流速度進行模型群建模,故此處只給出洋流狀態矩陣塊Fon,其余將省略。
(3)
式中,βE、βN分別為東向和北向洋流模型的時間常數。
W=[0 0 0 0 0 0 0ωdEωdNωgE
ωgNωgUωEωN]T
(4)
式中,W為零均值的高斯白噪聲,它的協方差矩陣為Q;ωdE、ωdN分別為加速度計東向和北向噪聲;ωgE、ωgN、ωgU分別為陀螺東向、北向和天向噪聲;ωE、ωN分別為洋流速度模型對應的東向和北向白噪聲。
在水下環境中,如果DVL工作在水跟蹤模式下,則其測得的是對水的相對速度,即
(5)
式中,vE、vN分別為慣導系統計算的東向和北向速度;vDVL(E)、vDVL(N)分別為DVL測得的相對于水的東向和北向速度,對式(5)整理可得
(6)
本文利用慣導解算的速度與DVL測得的速度之差作為濾波器的量測量,則SINS/DVL組合導航系統的量測方程為
(7)
式中,量測噪聲V為零均值白噪聲,它的協方差矩陣為R,式(7)中量測矩陣H為
H=

(8)
2 SINS/DVL組合導航系統模型群的建立
基于DS-VSMM算法對導航參數進行估計,首先建立系統的模型群。根據第1節,洋流速度模型設置為一階馬爾可夫過程,然而在實際中,洋流速度模型中的一階馬爾科夫過程相關時間常數是未知的,它會隨著外部因素的變化而變化。因此,為了能夠準確地估計洋流的速度,在可能的范圍內設置一個大的洋流速度模型群(不同模型對應不同的相關時間常數)。此外,由于水下環境復雜,SINS/DVL組合導航系統中量測噪聲的統計特性也會隨機變化,因此量測噪聲協方差矩陣R也是一個未知的參數。
本文基于不同的相關時間常數β和量測噪聲協方差矩陣R,設置了13個模型。根據式(3),洋流速度模型相關時間常數β對應狀態轉移矩陣塊Fon,各個模型中對應的狀態矩陣塊Fon和量測噪聲方差矩陣R設置如表1所示。
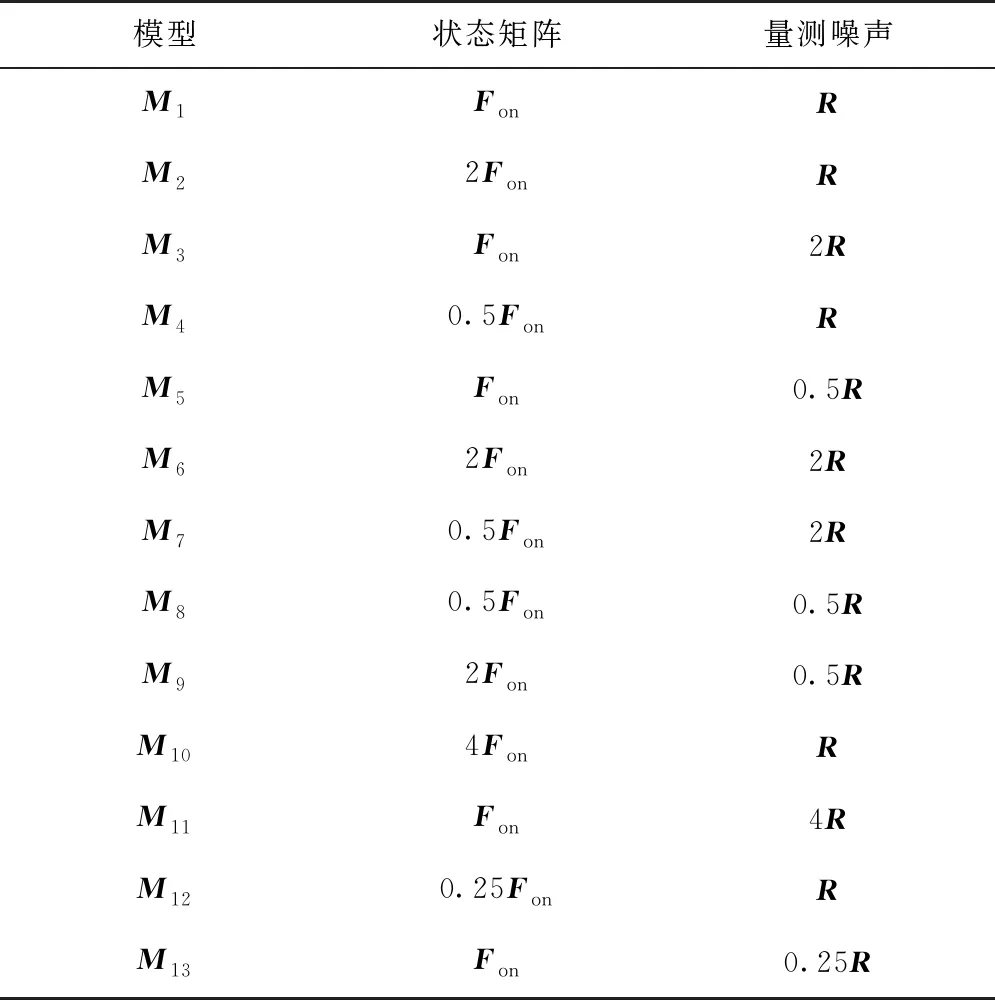
表1 各個模型與洋流模型狀態矩陣塊、量測噪聲方差矩陣的對應關系
假設系統模型的跳變不會出現斷層式的情況,即只在相鄰模型之間切換。例如:系統不會出現從Fon直接越過2Fon跳變到4Fon的情況,R的跳變情況同上,那么SINS/DVL組合導航系統模型跳變的拓撲有向圖如圖1所示。
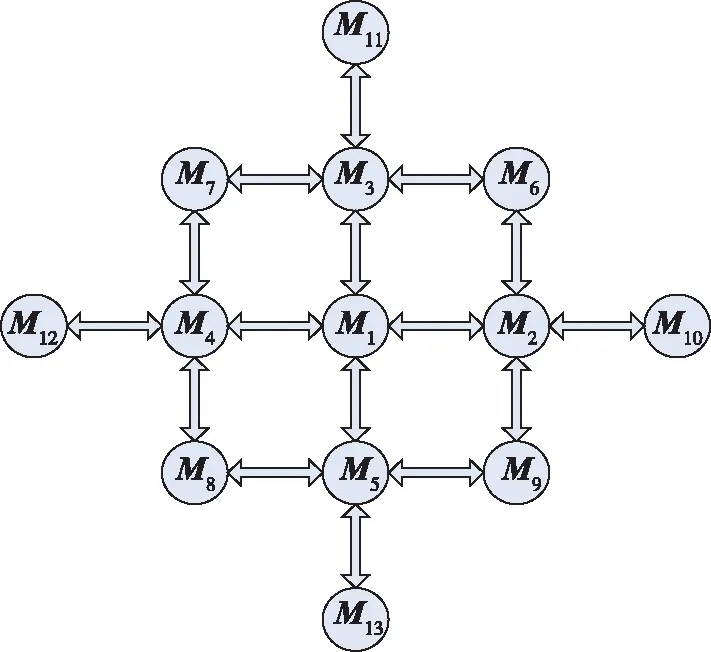
圖1 SINS/DVL組合導航系統整體模型群的有向圖
圖1中,箭頭所指兩個模型可以互相進行切換。將SINS/DVL組合導航系統可能出現的跳變分為四種類型:β變大的跳變、β變小的跳變、R變大的跳變和R變小的跳變。
假設系統當前時刻處于模型M1,隨后可能向模型M2跳變(β增大),也可能向模型M4跳變(β減小),也可能向模型M3跳變(R增大),也可能向模型M5跳變(R減小),這種情況對應的子模型群為A1={M1,M2,M3,M4,M5},M1為子模型群A1的中心模型。子模型群A1的有向圖如圖2所示。
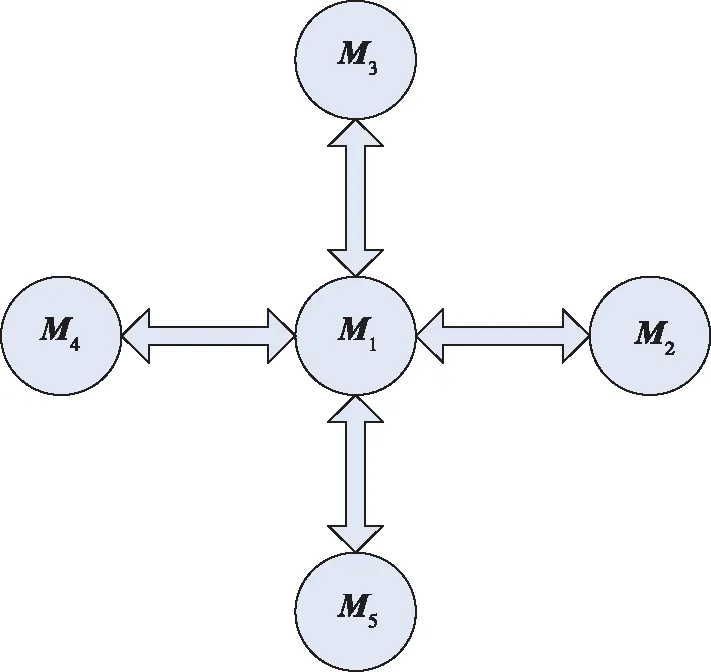
圖2 SINS/DVL組合導航系統子模型群A1的有向圖
與圖2所示的子模型群A1類似,還有分別以M2、M3、M4和M5為中心的子模型群A2、A3、A4和A5
A2={M2,M10,M6,M1,M9}A3={M3,M11,M7,M1,M6}A4={M4,M12,M8,M1,M7}A5={M5,M13,M9,M1,M8}
3 模型群切換算法
模型群切換(Model-GroupSwitching,MGS)算法首先需要設置模型群,隨后要制定MGS算法的自適應策略。MGS算法在運行過程中一般分為兩部分:模型群激活與終止,最后在匹配的有向圖內進行IMM濾波。MGS算法步驟如下:
步驟1:將計數時間k增加1,即k→k+1。運行VSMM[Mk,Mk-1]一個周期。
步驟2:檢測是否有候選模型群被激活。當滿足以下概率條件時
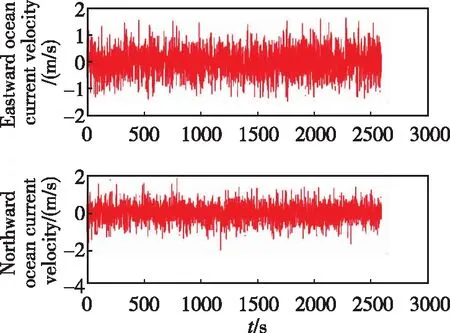
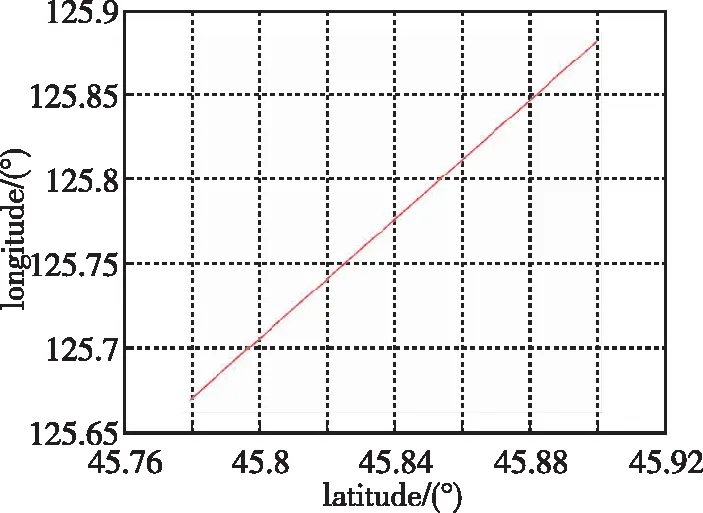
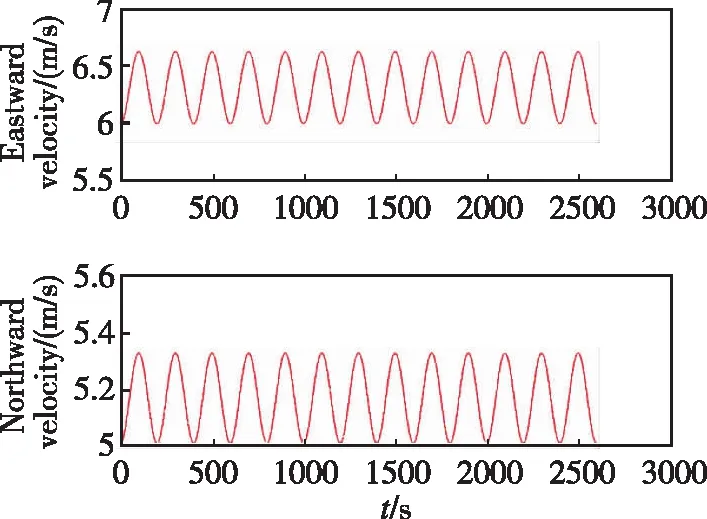
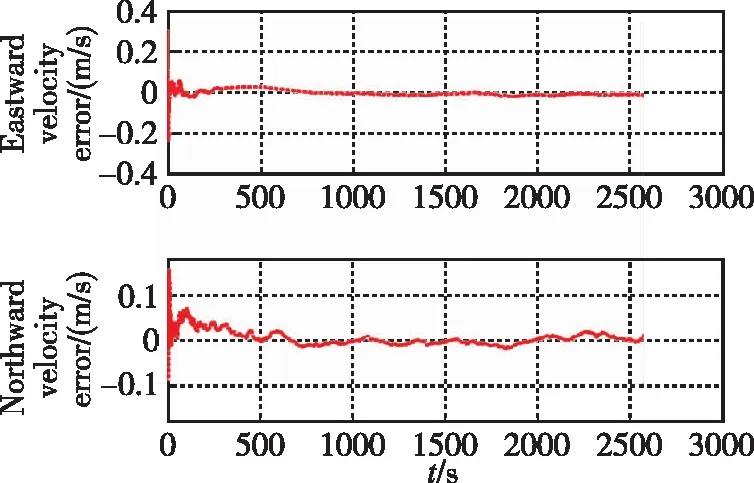
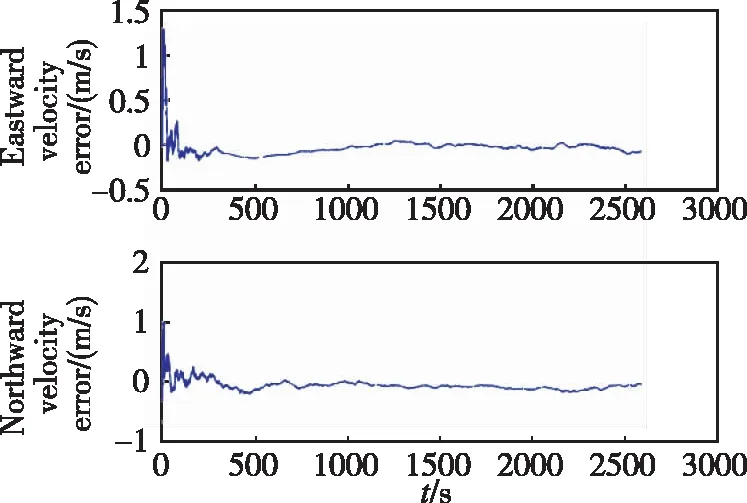
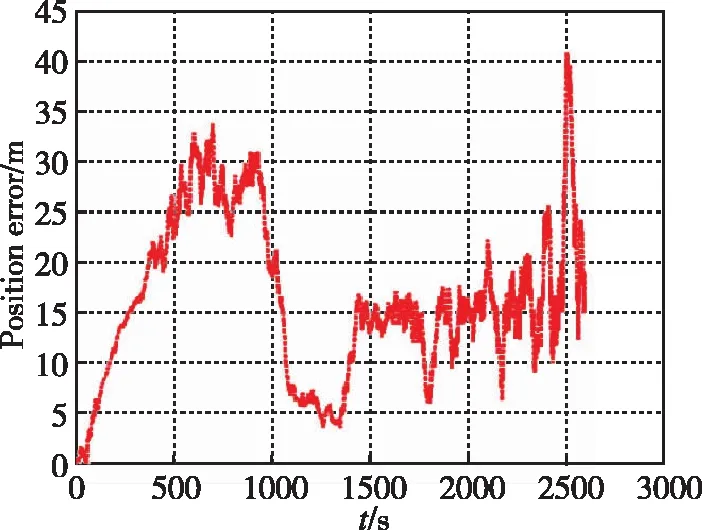
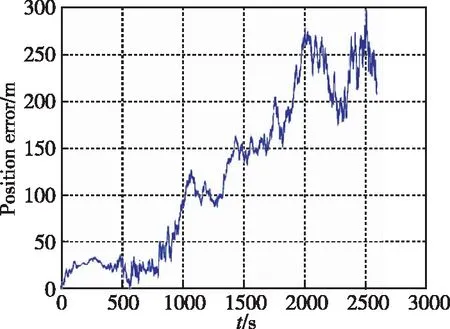
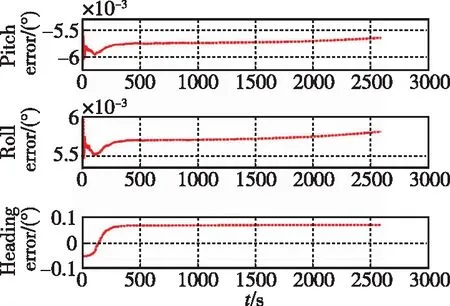
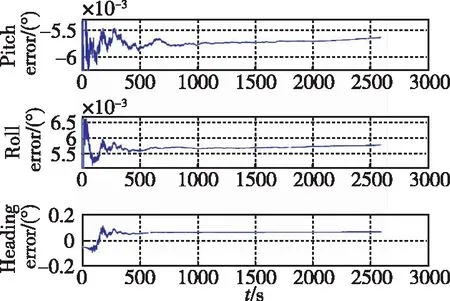
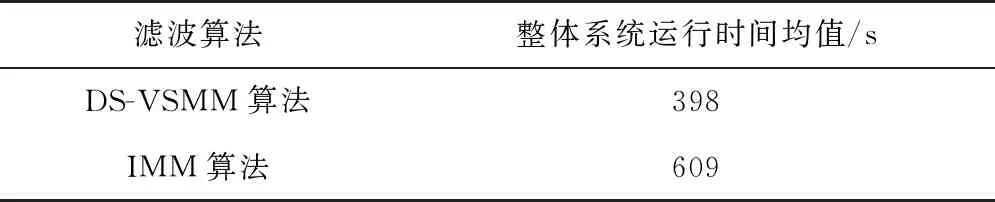
μk (9) 步驟3:如果模型群Ma被激活,則令Mo=Mk,同時進行如下運算: 1)運行VSMM[Mn,Mk-1]一個周期,其中Mn=Ma-Mo是新模型的集合。 2)令Mk=Mn∪Mo=Ma∪Mo。 3)估計融合:對模型群Mk計算模式概率、狀態估計以及誤差的協方差矩陣,分別如式(10)~式(12)所示 (10) (11) (12) 步驟5:模型群Ml=Mo或Ml=Ma,則有式(13)~式(15) (13) (14) (15) 當式(16)或式(17)成立時 (16) (17) 則終止模型群Ma,令Mk+1=Mo,然后跳轉到步驟1。 當式(18)與式(19)同時成立時 (18) (19) 則終止模型群Mo,并令Mk+1=Ma,然后跳轉到步驟1。 步驟6:將計數時間k增加1,即k→k+1,同時令Mk+1=Mk,運行VSMM[Mk,Mk-1]一個周期,然后跳轉到步驟4。 為了驗證基于DS-VSMM的SINS/DVL組合導航算法的性能,在仿真環境相同的情況下,對比DS-VSMM算法與IMM算法。 (20) 根據式(20)以及表1,仿真中真實的洋流速度曲線如圖3所示。 圖3 真實的洋流速度曲線圖 此外,這里還給出了仿真環境中設置的載體運動軌跡以及速度變化圖,如圖4和圖5所示。 圖4 載體運動軌跡 圖5 載體的速度變化曲線圖 根據上述仿真環境,分別應用DS-VSMM算法和IMM算法,最終得到兩種算法在SINS/DVL組合導航系統中的誤差,仿真結果如圖6~圖11所示。 圖6 DS-VSMM速度誤差曲線圖 圖7 IMM速度誤差曲線圖 圖8 DS-VSMM位置誤差曲線圖 圖9 IMM位置誤差曲線圖 圖10 DS-VSMM姿態角誤差曲線圖 圖11 IMM姿態角誤差曲線圖 由上述仿真結果曲線對比可知,在橫滾以及俯仰角誤差方面,應用DS-VSMM算法與IMM算法二者無明顯差別;在速度誤差、位置誤差和航向角誤差方面,應用DS-VSMM算法明顯優于IMM算法。綜上所述,本文設計的基于DS-VSMM的SINS/DVL組合導航算法可以更好地消除洋流速度對系統的影響,進一步提高了組合導航系統的性能。 兩種算法運行10次的時間均值如表2所示,表明本文提出的算法具有更優的費效比。 表2 兩種算法運行10次的時間均值對比 IMM算法每次濾波要使用全部13個子模型濾波,而DS-VSMM算法每次濾波只需要使用相應的5個子模型濾波。DS-VSMM算法運行時間理論上是IMM算法運行時間的38.5%,但由于需要進行子模型群切換,進而增加了一定的運行時間,因此根據表2,DS-VSMM算法最終的運行時間是IMM算法的65.4%。綜上所述,基于DS-VSMM算法的SINS/DVL組合導航與應用IMM算法相比,降低了計算量,且進一步提高了系統的性能。 本文針對無人水下航行器面臨的不確定性洋流速度影響SINS/DVL組合導航系統導航精度的問題,提出了一種基于DS-VSMM的組合導航算法。當工作在水跟蹤模式下,DVL只能提供相對于水的速度信息,因此洋流速度會影響SINS/DVL組合導航系統的性能。為了能夠準確地對洋流速度進行估計,本文基于有向圖切換方法,建立了洋流速度模型群,通過所設置的模型群切換策略對模型群進行激活和終止,最終實現了對洋流速度的準確估計,進而消除了其對SINS/DVL組合導航系統的影響。仿真結果表明:基于DS-VSMM的SINS/DVL組合導航算法的位置誤差控制在50m之內,而IMM算法的位置誤差接近300m,前者的定位精度明顯優于后者。本文提出的算法可以很好地克服多變的洋流速度引起的導航誤差,同時減少了一定的計算量,提高了效費比,也提高了導航系統的精度,為進一步實現水下高精度SINS/DVL組合導航提供了參考。為進一步提高SINS/DVL組合導航系統的穩定性及水下高精度導航能力,還需要更深入的研究: 1)本文提出的算法構建的洋流速度模型較少,在實際應用中,可以根據具體的導航精度要求設置更多的洋流速度模型; 2)本文的濾波方法為KF,并未進行非線性近似,可使用其他非線性濾波方法進行同條件仿真,比較不同濾波方法的優劣,從而選出最優的濾波算法。4 仿真驗證

5 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
