基于自抗擾的無人機(jī)俯仰姿態(tài)控制
2021-05-18 12:06:40蔣玉新林祺凱
導(dǎo)航定位與授時(shí) 2021年3期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
蔣玉新,王 平,劉 貝,林祺凱
(海鷹航空通用裝備有限責(zé)任公司,北京 100074)
0 引言
為了高效地完成飛行任務(wù),無人機(jī)飛行控制系統(tǒng)需要具備良好的性能。姿態(tài)控制回路是飛行控制系統(tǒng)的基礎(chǔ),其性能直接影響飛行控制系統(tǒng)的品質(zhì)。飛機(jī)在進(jìn)行快速高度機(jī)動(dòng)時(shí),對俯仰姿態(tài)控制器的動(dòng)態(tài)品質(zhì)提出了較高的要求。此外,在控制系統(tǒng)設(shè)計(jì)過程中,還要面對由于氣動(dòng)參數(shù)攝動(dòng)、傳感器誤差帶來的模型不確定性以及外界環(huán)境的不確定干擾(如大氣紊流)等,在增加設(shè)計(jì)難度的同時(shí)也對飛控系統(tǒng)的魯棒性提出了更高的要求。
目前,工程實(shí)踐中主要基于飛機(jī)小擾動(dòng)線性化模型進(jìn)行多狀態(tài)點(diǎn)PID姿態(tài)控制器設(shè)計(jì),然而基于該方法所設(shè)計(jì)的控制器在本質(zhì)上只具有在平衡點(diǎn)鄰域內(nèi)的局部穩(wěn)定性[1-2],還需要在飛行包線內(nèi)選取盡可能多的狀態(tài)點(diǎn)進(jìn)行全包絡(luò)設(shè)計(jì),增加了控制器設(shè)計(jì)的工作量。
近年來,一種最大程度保持PID 控制形式,同時(shí)借助于現(xiàn)代控制理論中觀測器思想,而不依賴于被控對象模型的自抗擾控制(Active Disturbance Rejection Control, ADRC)方法[3-5],已在姿態(tài)控制問題上得到了成功應(yīng)用[6-7]。
本文針對固定翼無人機(jī)俯仰姿態(tài)控制回路在模型參數(shù)和復(fù)雜外界環(huán)境等不確定性干擾影響下魯棒性差、系統(tǒng)響應(yīng)速度慢的問題,通過構(gòu)造線性擴(kuò)張狀態(tài)觀測器(Linear Extended Statement Observer, LESO)觀測不確定擾動(dòng)狀態(tài)并在控制回路中反饋補(bǔ)償,使其被快速抑制[8-9]。仿真結(jié)果表明,設(shè)計(jì)的俯仰姿態(tài)控制系統(tǒng)具有較好的性能,能夠?qū)崿F(xiàn)姿態(tài)控制與穩(wěn)定,且提升了系統(tǒng)的魯棒性。
1 無人機(jī)俯仰姿態(tài)控制模型
根據(jù)文獻(xiàn)[10],無人機(jī)在非大角度縱向機(jī)動(dòng)條件下,六自由度運(yùn)動(dòng)的全狀態(tài)非線性運(yùn)動(dòng)方程如下
(1)
其中,各狀態(tài)參數(shù)依次為:飛機(jī)質(zhì)量m;飛行速度V;發(fā)動(dòng)機(jī)推力P;阻力X;升力Y;側(cè)向力Z;航跡傾角θ;航跡偏角ψv;航跡滾轉(zhuǎn)角γv;攻角α;側(cè)滑角β;橫滾角速度ωx;偏航角速度ωy;俯仰角速度ωz;橫滾角γ;偏航角ψ;俯仰角?;Jx、Jy、Jz分別為飛機(jī)相對于機(jī)體坐標(biāo)系各軸的轉(zhuǎn)動(dòng)慣量;Mx、My、Mz分別為作用在飛機(jī)上的所有外力( 含推力) 對質(zhì)心的力矩在機(jī)體坐標(biāo)系各軸上的分量。
通過變換式(1)中的第6個(gè)等式,得到如下繞軸角加速度方程
(2)
俯仰力矩與升降舵偏的關(guān)系可用如下方程描述
(3)

將式(3)代入式(2),可得
(4)
由式(1)可得
(5)
將式(4)代入式(5),可得
(6)
2 ADRC設(shè)計(jì)
2.1 LESO設(shè)計(jì)

(Jy-Jx)ωyωxcosγ/Jz+
(7)
定義
x1=y
QSLcosγ/Jz-(Jy-Jx)·ωyωxcosγ/Jz+
(8)
(9)
把式(9)表示成如下矩陣形式
(10)

可構(gòu)造系統(tǒng)(10)的觀測器如式(11)所示
(11)
通過引入合適的觀測誤差反饋系數(shù),可以保證觀測器的穩(wěn)定性和時(shí)效性,從而實(shí)現(xiàn)系統(tǒng)中內(nèi)部擾動(dòng)和外部擾動(dòng)被實(shí)時(shí)估計(jì)的目的。其中反饋向量L的取值參考文獻(xiàn)[11]中將觀測器極點(diǎn)全部配置成相同重根的方法,即
s2+l1s+l2=(s+ωo)2
(12)
則向量L可用觀測器的帶寬ωo表示如下
(13)
2.2 控制器設(shè)計(jì)
準(zhǔn)確估計(jì)出系統(tǒng)擾動(dòng)后,在控制回路中施加擾動(dòng)補(bǔ)償策略,進(jìn)而將系統(tǒng)補(bǔ)償為確定性系統(tǒng)[12-14]。
通過LESO,可估計(jì)出狀態(tài)z2≈x2,取控制量
(14)
則由式(9)可得
(15)
補(bǔ)償后的系統(tǒng)如式(15)所示,其中,δ0為虛擬控制輸入,考慮到飛機(jī)的俯仰角是最終的被控量,把δ0取為工程上最常用的形式
(16)
結(jié)合式(14)和式(16),俯仰姿態(tài)控制器為
(17)
其中,?r為俯仰角的期望值;kp為比例項(xiàng)系數(shù);kd為微分項(xiàng)系數(shù)。
由于實(shí)際被控對象的控制增益b很難獲得,控制器設(shè)計(jì)時(shí)采用與增益b相近的參數(shù)b0來代替。俯仰姿態(tài)控制器中,b0按照升降舵舵效系數(shù)取值,b0與b的差作為擾動(dòng)f中的一項(xiàng),可被LESO估計(jì)并補(bǔ)償。最終的俯仰姿態(tài)控制器用可調(diào)參數(shù)描述為
(18)
而對應(yīng)的擴(kuò)張狀態(tài)觀測器為
(19)
基于ADRC 的俯仰姿態(tài)控制系統(tǒng)結(jié)構(gòu)如圖1所示。
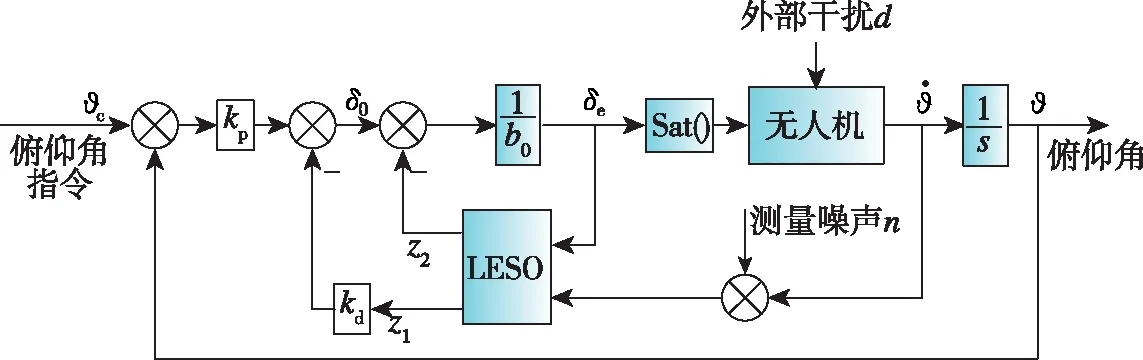
圖1 基于ADRC的俯仰姿態(tài)控制系統(tǒng)結(jié)構(gòu)圖
3 性能分析與仿真
針對某型無人機(jī),基于ADRC設(shè)計(jì)了俯仰姿態(tài)控制器,并對其控制效果進(jìn)行仿真與分析。選取LESO觀測帶寬ωo=5,控制增益b0=-2,比例項(xiàng)系數(shù)kp=1,微分項(xiàng)系數(shù)kd=2。
選取多個(gè)狀態(tài)點(diǎn)分析LESO狀態(tài)反饋補(bǔ)償后系統(tǒng)的開環(huán)頻域特性,仿真結(jié)果如圖2所示。
由圖2可知,通過引入LESO狀態(tài)補(bǔ)償反饋,系統(tǒng)開環(huán)在低頻段具有足夠高的增益,可確保系統(tǒng)具有良好的穩(wěn)態(tài)性能。同時(shí),在全設(shè)計(jì)剖面內(nèi)系統(tǒng)具有良好的動(dòng)態(tài)性能,相位裕度均不低于66°,幅值裕度不低于25dB。
在LESO補(bǔ)償回路的基礎(chǔ)上,加入PD控制環(huán)節(jié),俯仰角控制閉環(huán)階躍響應(yīng)如圖3所示。
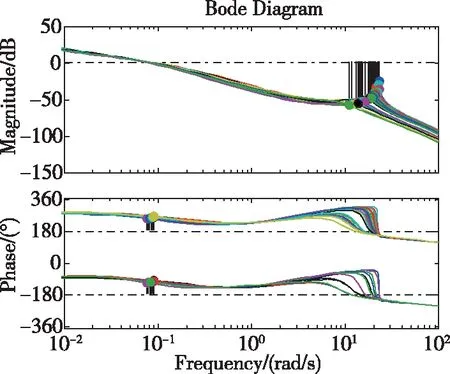
圖2 LESO反饋補(bǔ)償后俯仰角開環(huán)頻域特性
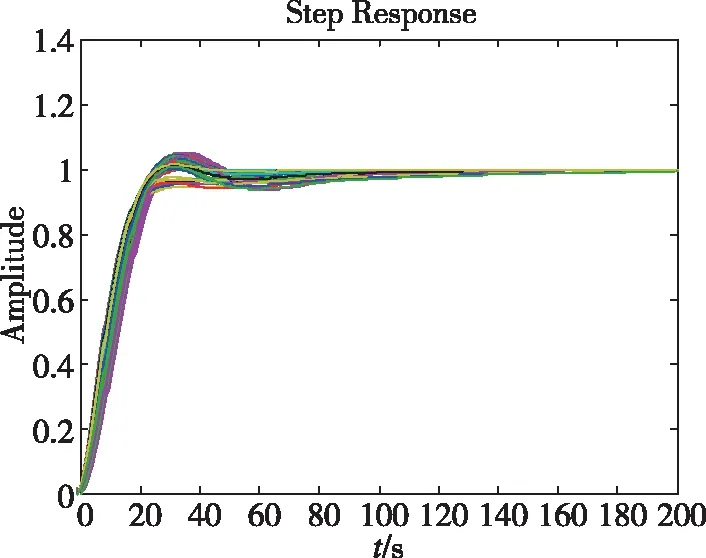
圖3 俯仰角控制閉環(huán)階躍響應(yīng)
圖3表明俯仰角閉環(huán)系統(tǒng)在各狀態(tài)點(diǎn)具有較好的指令跟蹤性能,系統(tǒng)過渡段具有良好的阻尼特性,系統(tǒng)表現(xiàn)出較強(qiáng)的魯棒性。
無人機(jī)在飛行過程中不可避免地會受到各種干擾,對于俯仰姿態(tài)控制回路,一般表現(xiàn)為紊流、突風(fēng)等不確定因素產(chǎn)生的氣動(dòng)干擾以及傳感器測量高頻脈動(dòng)量信息。分析與仿真過程中,需要評估基于ADRC的俯仰姿態(tài)控制器在這兩種典型干擾條件下的響應(yīng)特性。
經(jīng)LESO狀態(tài)反饋補(bǔ)償后,噪聲到俯仰角開環(huán)頻域特性如圖4所示。
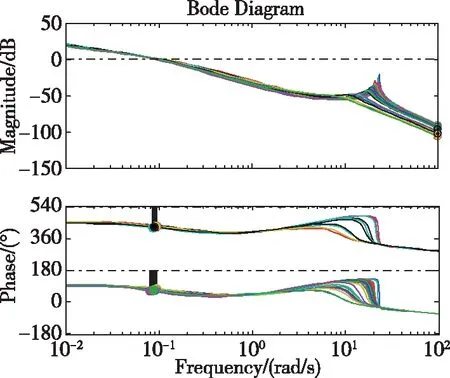
圖4 LESO反饋補(bǔ)償后噪聲到俯仰角開環(huán)頻域特性
由圖4可以看出,經(jīng)過LESO反饋補(bǔ)償環(huán)節(jié)后,高頻輸入信號產(chǎn)生的輸出量幅值得到衰減,高頻噪聲在輸出信號中產(chǎn)生的影響可被抑制,系統(tǒng)的抗干擾能力得到了增強(qiáng)。
結(jié)合非線性模型進(jìn)行六自由度仿真驗(yàn)證,無人機(jī)起飛后爬升至1000m高度,穩(wěn)定后繼續(xù)爬升至3000m高度,將俯仰力矩系數(shù)mz人為施以30%的偏差,俯仰姿態(tài)控制回路抗干擾能力及控制效果如圖5所示,其中,H-ADRC和H-ADRC-mz+分別為引入氣動(dòng)干擾前后的無人機(jī)高度指令響應(yīng)曲線。
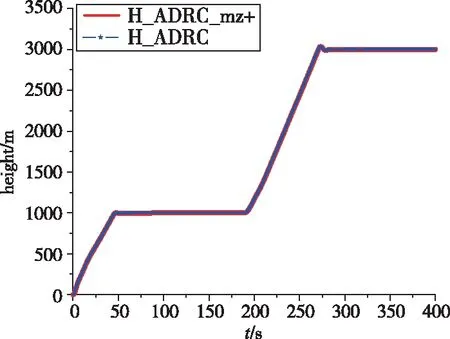
圖5 引入氣動(dòng)干擾前后控制效果對比
LESO對干擾的估計(jì)如圖6所示,其中,z2是擴(kuò)張狀態(tài)x2的估計(jì)值,即式(8)中干擾f的估計(jì)值。

圖6 LESO擴(kuò)張狀態(tài)變量
由圖5可知,對于ADRC,在加入氣動(dòng)干擾前后,其響應(yīng)曲線不變,這歸功于LESO對干擾的實(shí)時(shí)估計(jì)和補(bǔ)償。從圖6不難看出,LESO 能較好地將由風(fēng)洞實(shí)驗(yàn)偏差和高度指令改變等形成的內(nèi)、外干擾估計(jì)出來,由此說明ADRC具有良好的抗干擾特性。
4 結(jié)論
本文針對無人機(jī)俯仰姿態(tài)回路受模型參數(shù)以及外界環(huán)境變化等干擾因素影響較大的問題,基于ADRC理論設(shè)計(jì)了俯仰姿態(tài)控制器,通過LESO對系統(tǒng)各項(xiàng)不確定性干擾進(jìn)行實(shí)時(shí)估計(jì),并以反饋量的形式引入控制輸入。性能分析與仿真結(jié)果表明:
1)LESO反饋補(bǔ)償后,系統(tǒng)的動(dòng)態(tài)和穩(wěn)態(tài)特性均得到了優(yōu)化,具有良好的跟蹤性能,可實(shí)現(xiàn)姿態(tài)穩(wěn)定控制;
2)基于ADRC方法設(shè)計(jì)的俯仰姿態(tài)控制器可快速抑制氣動(dòng)參數(shù)攝動(dòng)和傳感器噪聲等干擾因素產(chǎn)生的影響,表現(xiàn)出較強(qiáng)的魯棒性和抗干擾能力;
3)控制器設(shè)計(jì)直接針對飛機(jī)的非線性模型,在很大的包線范圍內(nèi)不需要改變控制器的結(jié)構(gòu)和參數(shù),簡化了設(shè)計(jì)過程。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
