一種臨近空間飛行器動態拖尾星圖復原方法
2021-05-27 06:38:54孫洪馳穆榮軍劉麗麗崔乃剛
中國慣性技術學報 2021年1期
關鍵詞:圖像復原
孫洪馳,穆榮軍,劉麗麗,崔乃剛
(哈爾濱工業大學 航天學院,哈爾濱 150001)
臨近空間高超速飛行器飛行速度極快,姿態誤差會對位置精度造成很大影響[1-3]。天文導航可以達到很高的姿態精度[4],引入天文導航對臨近空間飛行器的姿態進行修正有助于提高飛行器的長航時精度保持能力,同時可以輔助修正慣導陀螺零偏,有效提高導航精度[5,6]。臨近空間環境下天文導航面臨的主要問題是飛行器大姿態機動時導致的星點拖尾[7]。星點拖尾會導致星點成像時能量分布發散,增加了星點提取的難度,甚至會導致導航算法失效[8]。
針對星圖拖尾有兩種解決方式:一是通過機械結構使曝光過程中的光學系統和被攝目標保持相對靜止,從硬件層面抑制拖尾的產生[9]。但這種方法存在成本較高、結構復雜、體積大等問題,難以在臨近空間飛行器上應用。第二種方法是通過圖像復原算法來對拖尾圖像進行復原,這種方法具有成本低、無需額外配置硬件、應用靈活等優點,適用于臨近空間飛行器[10]。
文獻[11]通過預測星點質心與提取星點質心之差,實現星敏感器動態誤差補償,但該方法對光軸方向動態誤差分量的觀測敏感性弱于其他分量;文獻[12]提出一種基于維納濾波的拖尾星圖處理方法,但并沒有考慮光軸方向角速度的影響,且對于拖尾參數的獲取沒有提出較為可行的方案。文獻[13]利用局部直方圖Gauss 擬合法估計背景參數,通過亞采樣方法對目標進行增強,采用四鄰域濾波對圖像進行修復,算法復雜度較高,不利于提高算法的快速性。
本文以計算量較小的維納濾波為基礎,引入IMU量測數據構建圖像復原函數,采用圖像分割的方法對拖尾星圖進行分布式處理,設計出一種計算量小、精度高、實用性強的拖尾星圖復原方法。
1 圖像分割分布式動態拖尾圖像復原算法
動態環境下會造成星敏感器拍攝的圖像出現拖尾現象,采用維納濾波的方法可以實現動態拖尾圖像的復原,但傳統的處理方法只能對非光軸角速度引起的拖尾進行有效復原。這是因為維納濾波主要用于民用相機中,日常使用時不會出現繞光軸方向的轉動,故傳統的處理方法是對整幅圖像進行一次性集中復原。而在天文導航中,星敏感器繞任何方向的姿態機動都是可能出現的,本文對此提出一種圖像分割分布式拖尾圖像復原算法,通過圖像分割對不同圖像區域的星點進行分布式維納濾波,可完全適應三軸角速度變化。
1.1 基于維納濾波的拖尾圖像處理方法

不考慮繞光軸的角速度時,一幅星圖中的所有星點拖尾方向和大小均是一致的。在時域內,拖尾圖像相當于原圖像與退化函數的卷積,理想情況下圖像的退化過程如下


顯然,有
這一過程稱為逆濾波,但在實際中退化圖像除了受退化函數影響外還受到噪聲影響,實際退化過程如圖1所示。
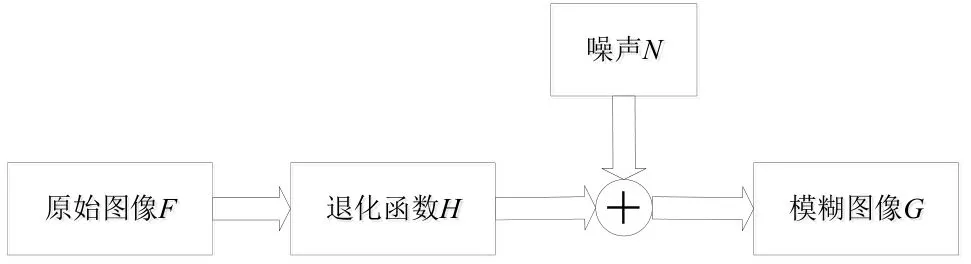
圖1 圖像運動模糊的退化過程Fig.1 Degradation process of image motion blur
時域下退化過程如下:

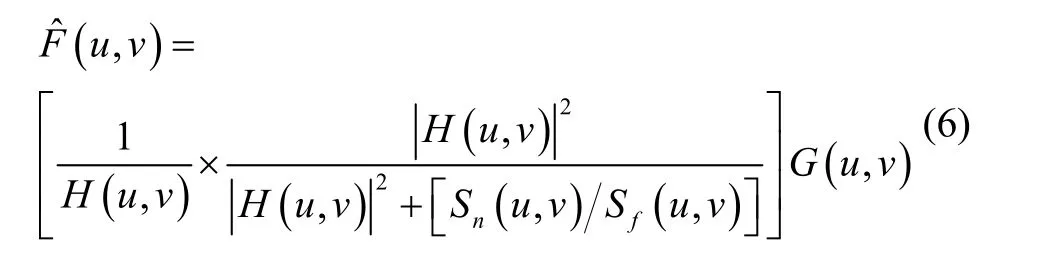
這時需要采用維納濾波進行復原,維納濾波建立在認為圖像和噪聲是隨機過程的基礎之上,可使復原圖像與原始圖像的均方誤差最小。頻域中維納濾波的表達式為:
1.2 基于IMU 輔助的分布式拖尾星圖復原方法
當存在繞光軸方向的角速度時,如圖2所示,星圖不同位置星點拖尾方向是不一致的,這時需要針對不同區域的星點進行分布式處理而不是對整幅圖像進行維納濾波復原。
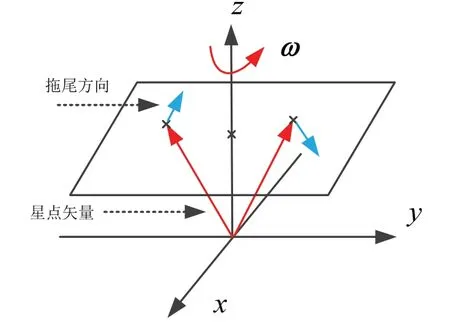
圖2 星圖拖尾效應原理示意圖Fig.2 Schematic diagram of star map tailing effect
為提高計算效率,本文采用IMU 測量參數輔助構建分布式維納濾波器,令星敏感器視場內的某顆導航星(記為S星)方向矢量為,根據星歷可得其在慣性系下的投影,利用姿態陣可將其轉換到星敏感器坐標系下,得到。記星敏感器焦距為f,光軸(z軸)方向矢量為,則星點質心矢量s為


星點與慣性空間固連,故星點質心矢量s在星敏感器坐標系下的旋轉角速度亦為,此時星點質心運動速度為


記像平面x軸方向矢量為,則星點運動模糊方向α為

記星敏感器曝光時間為tΔ,單位像素尺寸為ds,則星點運動模糊長度為

至此得到了導航星S所對應的運動模糊參數,但實際一幅星圖中存在多顆導航星,當存在繞光軸機動的角速度時,各星點的運動模糊參數都是不同的。最精確的處理方式是先對一幅星圖進行遍歷掃描,對每顆星點都劃分出單獨的星點窗口進行維納濾波。但每一個圖像分割窗口都對應一個維納濾波器,顯然當導航星數目較多時,這種方法將導致計算效率的嚴重降低。臨近空間飛行器動態環境較為惡劣,對導航算法的實時性具有一定的要求,在設計圖像分割算法時,還應綜合考慮計算效率的影響。
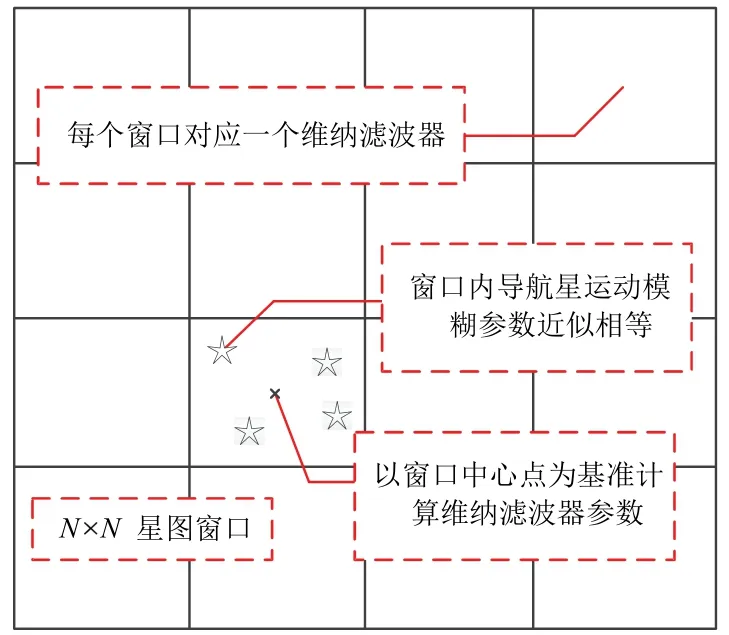
圖3 固定窗口分割示意圖Fig.3 Fixed window segmentation diagram
本文采用固定窗口分割方法,如圖3所示。將一幅星圖平均分成N N× 個區間,近似認為每個區間內的導航星運動模糊參數一致。顯然N越大算法精度越高但計算量也越大,需要通過計算機仿真獲得兼顧精度與計算效率的最優參數N。
2 仿真驗證
2.1 天文導航虛擬驗證軟件平臺開發
對于臨近空間背景的高超聲速飛行器,很難用外場實驗的方式模擬臨近空間環境下的觀測情況,故需要開發虛擬驗證軟件系統。虛擬軟件驗證系統的主要目的是:①模擬整個天文導航處理流程,使仿真結果更接近真實情況;②模擬臨近空間環境下的星點動態拖尾效應。
按各部分主要功能進行劃分,天文導航虛擬驗證軟件平臺主要由以下幾個模塊組成:
(1)時間模塊
該模塊的主要功能是:根據當前UTC(世界時)計算儒略日JD、格林尼治恒星時GAST。該模塊的輸入量為UTC,要實現目標是:①根據GAST計算出瞬時天球坐標系到瞬時地球固連坐標系的轉換矩陣;②為后續其他修正模塊提供時間基準JD。
(2)導航星庫修正模塊
該模塊的主要功能是:根據時間基準JD和導航星表參數修正恒星自行、完成星表劃分、剔除雙星三種功能。
為提高對全天星表的檢索效率,需要對導航星表進行分割,通常星表分割采用赤緯帶、球矩形等方法。但這些方法存在導航星數目分割不均勻的問題,即越靠近兩極,導航星數目越少。為解決上述問題,本文提出一種基于C60 分子結構的全天星表分割方法,這樣可將全天分成32 個天區,每個天區為正五、六邊型,還可進一步將每個天區分成5、6 個小天區,小天區為正三角形。星表分割如圖4所示。
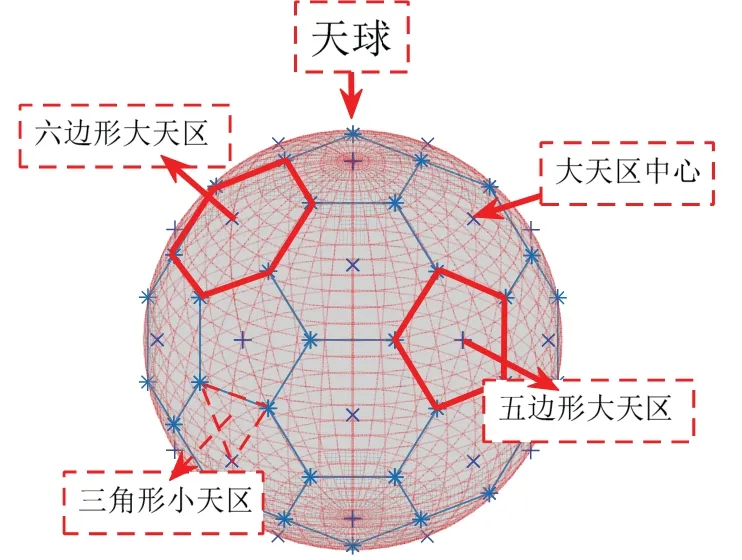
圖4 全天星表分割示意圖Fig.4 Schematic diagram of all sky catalogue segmentation
(3)地球參數修正模塊
該模塊的主要功能是:根據時間基準JD計算地球歲差、章動、極移和光行差修正矩陣。其中地球歲差、章動采用IAU1980 模型;極移數據來自國際地球自轉服務(International Earth Rotation Service,IERS);光行差修正涉及的地球參數來自DE405 模型。
(4)星圖模擬模塊
該模塊的主要功能是:根據星敏感器位置、姿態、時間、視場進行視場內的導航星圖模擬。
(5)星圖預處理模塊
該模塊的主要功能是:星圖背景過濾、導航星窗口提取和星點質心提取。
(6)天文導航解算模塊
該模塊的主要功能是:采用三角形算法進行星圖識別,然后根據星圖識別結果進行姿態解算,輸出星敏感器姿態解算結果。
天文導航虛擬驗證軟件平臺框圖如圖5所示。
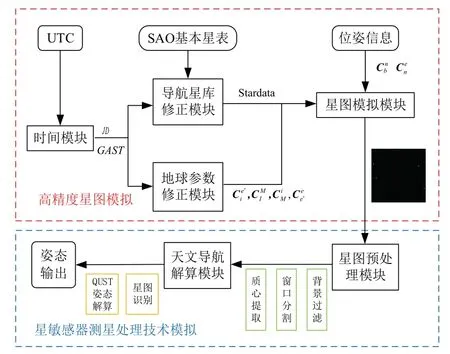
圖5 天文導航虛擬驗證軟件平臺原理框圖Fig.5 Schematic diagram of celestial navigation virtual verification software platform
2.2 臨近空間飛行器標稱軌跡仿真
以臨近空間飛行器為仿真對象,仿真中采用的飛行器氣動參數來自文獻[14]。設飛行器初速度為5 Ma,初始緯度、經度為40 °、120 °,高度30 km,航向正東、俯仰30 °、滾轉0 °,假設飛行過程中機頭指向始終與速度方向一致(姿態約束),其余模型參數如表1。仿真軌跡如圖6所示。
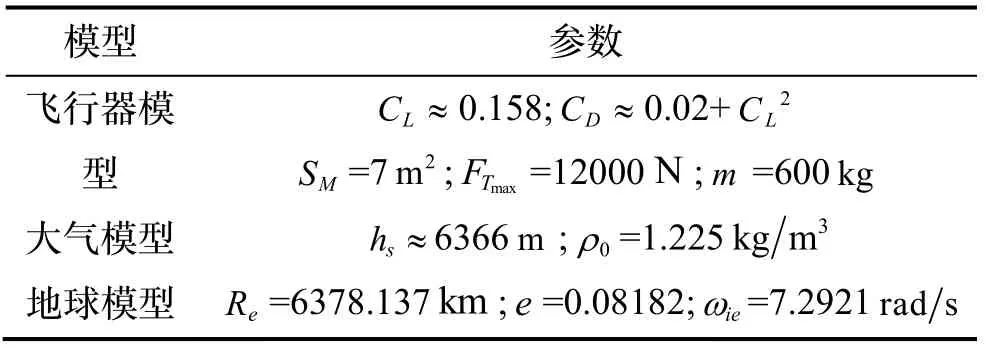
表1 仿真器件參數Tab.1 Simulated device parameters
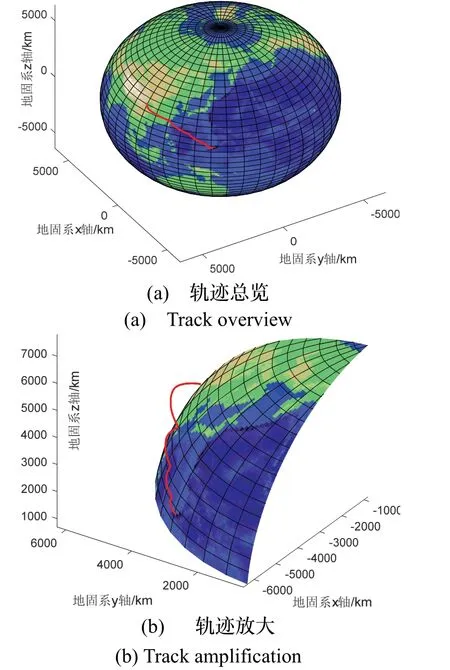
圖6 三維仿真軌跡Fig.6 Three-dimensional simulation trajectory
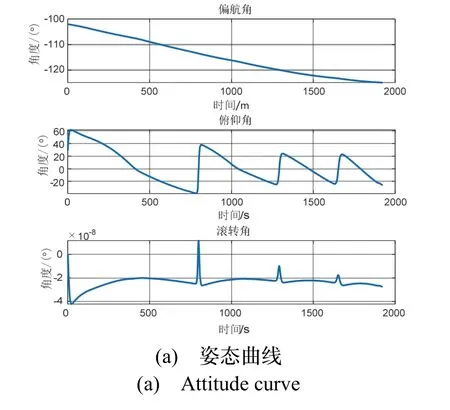

圖7 軌跡仿真曲線Fig.7 Trajectory simulation curve
從軌跡姿態和角速度仿真曲線(圖7所示)可以看出,臨近空間飛行器在再入大氣層時,由于氣動力的作用會導致飛行器俯仰軸出現大姿態機動,角速度在4 °/s 左右。對于天文導航系統,由于圖像曝光需要一定的積分時間,因此在大姿態機動時極易產生星圖拖尾現象。
2.3 集中式與分布式維納濾波效果對比
設置載體繞光軸以30 °/s 的角速度進行姿態機動,星敏感器曝光時間設為0.1 s,得到星敏感器視場內觀測到的拖尾圖像如圖8所示。

圖8 拖尾星圖模擬結果Fig.8 Simulation of trailing star map
圖8(a)展示了繞光軸機動時視場內不同導航星拖尾參數的差異性,不同位置的星點模糊長度xyL和模糊方向α均不一致,顯然此時采用集中式維納濾波無法對整幅星圖進行復原。圖8(b)增加了背景噪聲,從這里可以看出星圖拖尾效應的另一個負面影響,即星圖拖尾會導致星點能量分布不集中,此時拖尾效應嚴重的星點亮度急劇下降,幾乎淹沒在背景噪聲中,這對后續的星點提取是十分不利的。
然后對比集中式維納濾波和分布式維納濾波的圖像復原效果。設置載體自由機動,繞星敏感器三軸角速度分別為2 °/s、2 °/s、10 °/s(光軸方向拖尾效應不明顯故提高一個量級)。對比集中式維納濾波和分布式維納濾波的圖像復原效果,仿真結果如圖9所示。
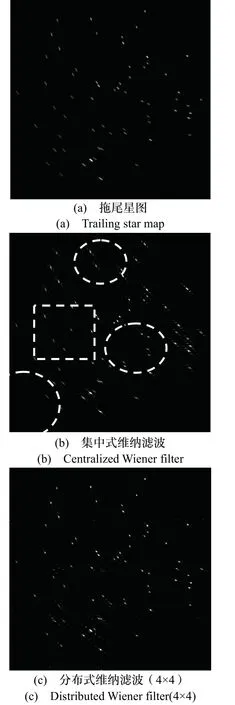
圖9 拖尾星圖復原效果對比Fig.9 Restoration effects comparison of trailing star images
在圖9(b)中用白色框線標注了復原星圖中的四種典型星點形狀,顯然位于圖像中心矩形框內的星點復原效果較好,而邊緣圓形框內的星點沒有得到有效的復原,星點拖尾依然存在。綜合來看,在進行拖尾星圖復原時,復原后的星點有如圖10所示的四種典型特征。
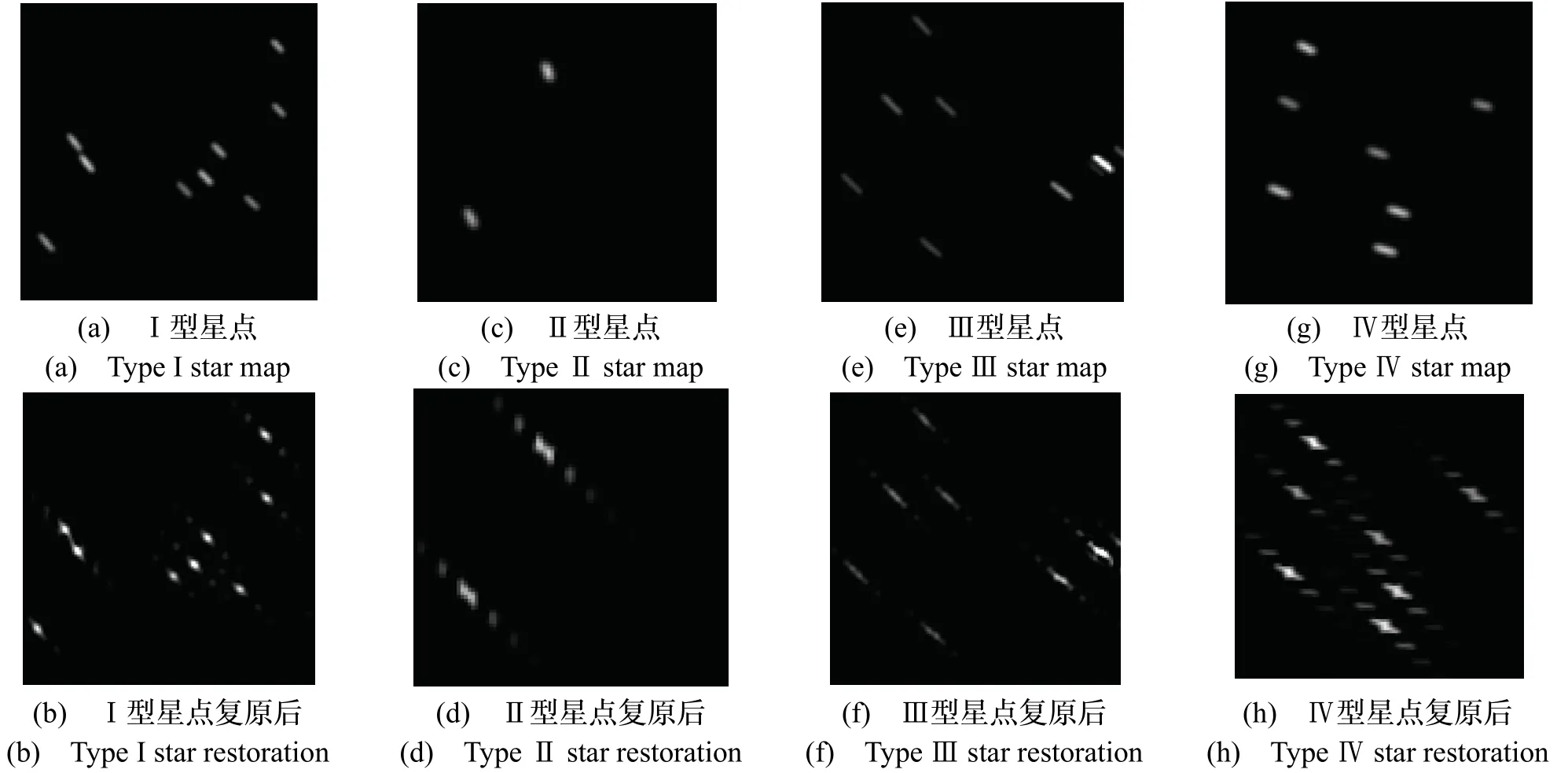
圖10 復原星圖中四種典型星點Fig.10 Four typical restored star points in star map
其中,Ⅰ型星點為正確復原的星點,從圖10(a)、(b)中可以看出星點得到了較好的復原;Ⅱ型星點復原后能量反而分散了,這是因為在進行維納濾波時,圖像的運動模糊參數xyL取值偏大,導致星圖復原過量;Ⅲ型星點與Ⅱ型星點恰好相反,復原后星點能量分布稍微集中一些,但依然存在拖尾現象,顯然是在進行維納濾波時xyL取值偏小,導致星圖復原不充分;Ⅳ型星點復原后拖尾效應并沒有改善,而且拖尾方向發生了變化,這是因為在進行維納濾波時圖像的運動模糊方向α不匹配,導致復原時角度出現錯誤。
圖9(b)展示的是4×4 分布式維納濾波結果,可以看出此時由于采用了分布式濾波,各部分的星點均得到了較為完善的復原。在進行窗口分割時,4×4 的分割方式已能滿足精度需求,2×2、8×8 分割方式下的維納濾波復原星圖如圖11所示。
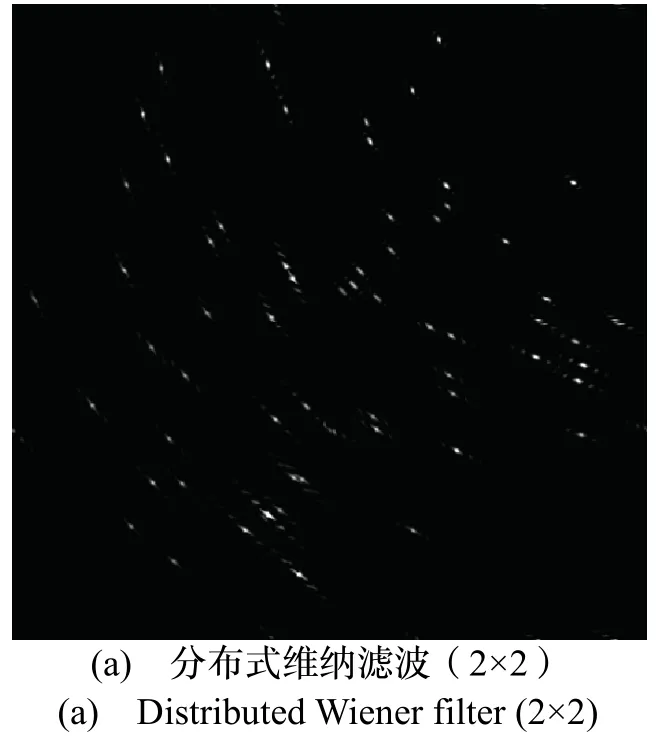
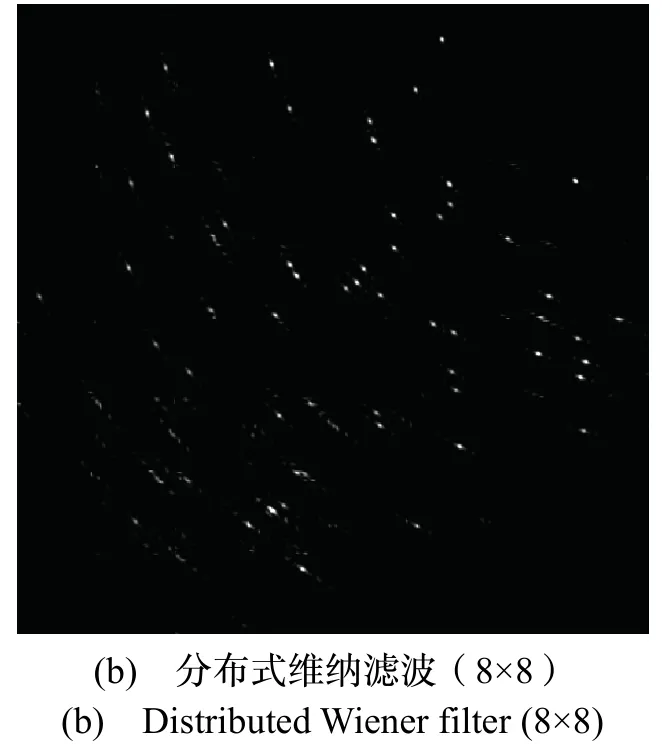
圖11 拖尾星圖復原效果對比Fig.11 Restoration effects comparison of trailing star images
如圖11所示,2×2 分布式維納濾波復原后星點依舊存在較為明顯的拖尾,而8×8 分布式維納濾波復原效果與4×4 分布式維納濾波相比并沒有顯著的提高,考慮到算法計算效率,應選擇4×4 分布式維納濾波構建臨近空間高超聲速飛行器的星圖復原算法。
2.4 拖尾星圖復原前后質心提取精度對比
拖尾圖像復原精度直接影響星點質心提取精度,間接影響最終導航精度,本文進行1000 次蒙特卡洛打靶仿真,統計圖像復原前后的星點質心提取精度和最終姿態解算精度,仿真中采用的質心提取方法為平方加權質心法,姿態解算方法為QUEST 算法,質心提取精度統計結果如圖12所示。
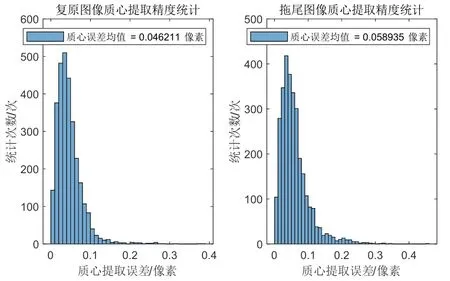
圖12 拖尾圖像復原前后質心提取精度統計Fig.12 Statistics of centroid extraction for star image restoration
如圖12所示,本文采用的拖尾圖像復原算法,可將星點質心提取精度由原來的0.059 像素提高到0.046,質心提取精度提高了20%。接下來統計姿態精度,結果如圖13所示。
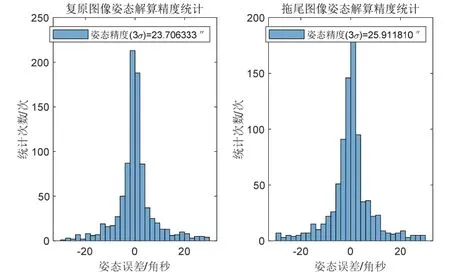
圖13 拖尾圖像復原前后姿態解算精度統計Fig.13 Statistics of attitude resolution for star image restoration
拖尾圖像復原后,可將姿態解算精度由原來的25.9 ″(3σ)提高到23.7 ″(3σ),姿態精度提高了10%,在1000 次打靶中,拖尾星圖處理前星點提取、匹配失敗139 次,準確率為86.1%,復原后星點提取、匹配失敗78 次,準確率92.2%。
2.5 拖尾星圖復原前后導航精度對比
對第500 s~520 s 軌跡數據進行仿真,對比圖像復原算法前后天文導航姿態解算結果如圖14所示。


圖14 星圖復原前后天文導航精度對比Fig.14 Comparison of celestial navigation accuracy after star map restoration
圖14(a)中的曲線跳變是星點匹配錯誤導致的,在仿真開始后的4 s~12 s 內,角速度達到峰值,此時曲線出現劇烈跳變,若不采用圖像復原算法,天文導航基本處于不可用狀態;圖14(b)中曲線跳變明顯減少,僅有的幾次跳變可以作為量測野值處理,圖像復原后天文導航算法可以正常工作,姿態精度可維持在20 ″(3σ)以內。
4 結論
首先,本文為提高算法的計算效率引入IMU 測量信息計算星點運動模糊參數。然后,針對傳統維納濾波無法對光軸方向的拖尾進行復原的缺陷,提出了一種圖像分割分布式維納濾波復原算法。最后基于臨近空間飛行器飛行特性設計了虛擬軟件驗證平臺,針對標稱軌跡模擬了臨近空間飛行器動態拖尾星圖并進行虛擬仿真驗證。仿真結果表明,圖像分割分布式拖尾星圖復原方法可對拖尾星圖進行有效復原,復原后姿態精度優于20 ″(3σ),質心提取精度提高了20%,姿態精度提高了10%,星點提取、匹配成功率增加6%。本文所提出的方法能對動態環境下的拖尾圖像進行有效復原,算法簡潔,工程可行性高,可為未來臨近空間飛行器天文導航算法的設計提供一定的理論參考。
猜你喜歡
農業工程學報(2022年14期)2022-10-19 02:34:26
石家莊鐵路職業技術學院學報(2019年3期)2019-10-30 03:26:32
大科技·C版(2019年1期)2019-09-10 14:45:17
數碼世界(2017年12期)2017-12-28 15:45:13
蘇州科技大學學報(自然科學版)(2017年1期)2017-03-20 15:25:20
科技資訊(2016年27期)2017-03-01 18:23:16
光學精密工程(2016年2期)2016-11-07 09:02:28
航天返回與遙感(2014年4期)2014-07-31 17:47:47
長江大學學報(自科版)(2014年7期)2014-03-20 13:21:02
電子設計工程(2014年18期)2014-02-27 12:00:32