基于均值漂移與自適應(yīng)閾值分割的刀具磨損檢測(cè)方法*
2021-07-03 02:29:14奚昌澤紹千鈞趙永杰梁冬泰
機(jī)械制造 2021年5期
□ 奚昌澤 □ 梁 丹 □ 紹千鈞 □ 趙永杰 □ 梁冬泰
寧波大學(xué) 機(jī)械工程與力學(xué)學(xué)院 浙江寧波 315211
1 研究背景
車(chē)刀是切削加工中應(yīng)用最為廣泛的刀具之一,應(yīng)用于各類(lèi)車(chē)床,可進(jìn)行外圓、內(nèi)孔、端面、螺紋、槽等不同種類(lèi)的加工。由于車(chē)刀在切削加工中常出現(xiàn)切削溫度過(guò)高、刀具涂層脫落、加工材料硬度過(guò)高等問(wèn)題,車(chē)刀的切削面極易磨損。磨損的車(chē)刀使工件加工表面粗糙度和尺寸精度無(wú)法保證,降低了生產(chǎn)效率與工件質(zhì)量,甚至可能引發(fā)生產(chǎn)安全問(wèn)題[1]。由此可見(jiàn),對(duì)車(chē)刀切削面進(jìn)行磨損檢測(cè)有重要意義。
現(xiàn)階段,隨著圖像處理技術(shù)的成熟,已經(jīng)發(fā)展出多種刀具磨損區(qū)域檢測(cè)方法。這些方法大多基于圖像分割技術(shù),主要分為三大類(lèi):① 基于閾值分割的方法,如秦國(guó)華等[2]根據(jù)刀具磨損圖像像素分布的特點(diǎn),提出了局部方差閾值分割算法,避免了原始圖像中的冗雜信息對(duì)分割過(guò)程的干擾;② 基于邊緣分割的方法,如林家寶[3]采用坎尼邊緣檢測(cè)算法對(duì)刀具位置進(jìn)行定位,通過(guò)自定義插值亞像素的方法對(duì)刀具進(jìn)行邊緣檢測(cè),并應(yīng)用最小二乘法對(duì)刀具的輪廓進(jìn)行擬合;③ 基于神經(jīng)網(wǎng)絡(luò)的分割方法,如桑宏強(qiáng)等[4]采用視覺(jué)傳感器獲取刀具加工后的表面紋理圖像,通過(guò)卷積神經(jīng)網(wǎng)絡(luò),結(jié)合磨損特點(diǎn),直接提取特征信息,得到刀具的磨損等級(jí)。
由于刀具磨損區(qū)域表面粗糙度值往往比較大,磨損區(qū)域難以精確分割,因此現(xiàn)有的磨損區(qū)域分割與檢測(cè)方法在噪聲干擾和復(fù)雜紋理?xiàng)l件下難以實(shí)現(xiàn)刀具磨損圖像的精確檢測(cè)。對(duì)此,筆者提出一種基于均值漂移與自適應(yīng)閾值分割的刀具磨損檢測(cè)方法。采用這一方法,在頻率域上進(jìn)行預(yù)處理,減小高頻噪聲對(duì)后續(xù)分割的影響;應(yīng)用均值漂移聚類(lèi)對(duì)磨損區(qū)域進(jìn)行初分割,簡(jiǎn)化圖像紋理信息;在此基礎(chǔ)上,通過(guò)自適應(yīng)閾值算法進(jìn)行二次分割,實(shí)現(xiàn)車(chē)刀磨損區(qū)域的準(zhǔn)確分割與提取。
2 檢測(cè)平臺(tái)搭建
對(duì)刀具磨損類(lèi)型與位置進(jìn)行分析,針對(duì)車(chē)刀主后刀面磨損,搭建了刀具磨損檢測(cè)平臺(tái)[5],如圖1所示。搭建的檢測(cè)平臺(tái)主要由彩色工業(yè)相機(jī)、光學(xué)變焦鏡頭、發(fā)光二極管環(huán)形光源、光學(xué)試驗(yàn)支架、光學(xué)穩(wěn)定平臺(tái)、計(jì)算機(jī)等組成。筆者使用這一檢測(cè)平臺(tái)完成車(chē)刀主后刀面磨損圖像的采集。
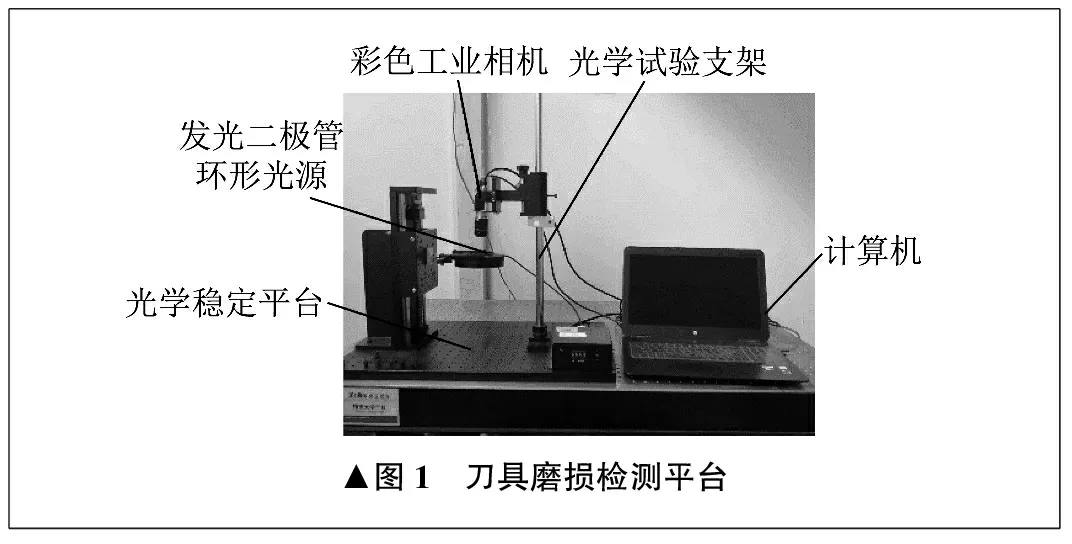
▲圖1 刀具磨損檢測(cè)平臺(tái)
3 車(chē)刀磨損主要形式
車(chē)刀磨損是車(chē)刀在高溫下與工件表面、切屑產(chǎn)生劇烈摩擦而產(chǎn)生的,車(chē)刀磨損的形式主要分為三種:前刀面磨損、后刀面磨損、邊界磨損。其中,車(chē)刀后刀面磨損又細(xì)分為主后刀面磨損與副后刀面磨損。車(chē)刀各種磨損形式如圖2所示。主后刀面磨損對(duì)刀具切削性能的影響最大,是導(dǎo)致加工工件精度問(wèn)題和刀具自身崩刃斷裂的主要因素[6],所以筆者針對(duì)車(chē)刀主后刀面磨損區(qū)域進(jìn)行檢測(cè)。
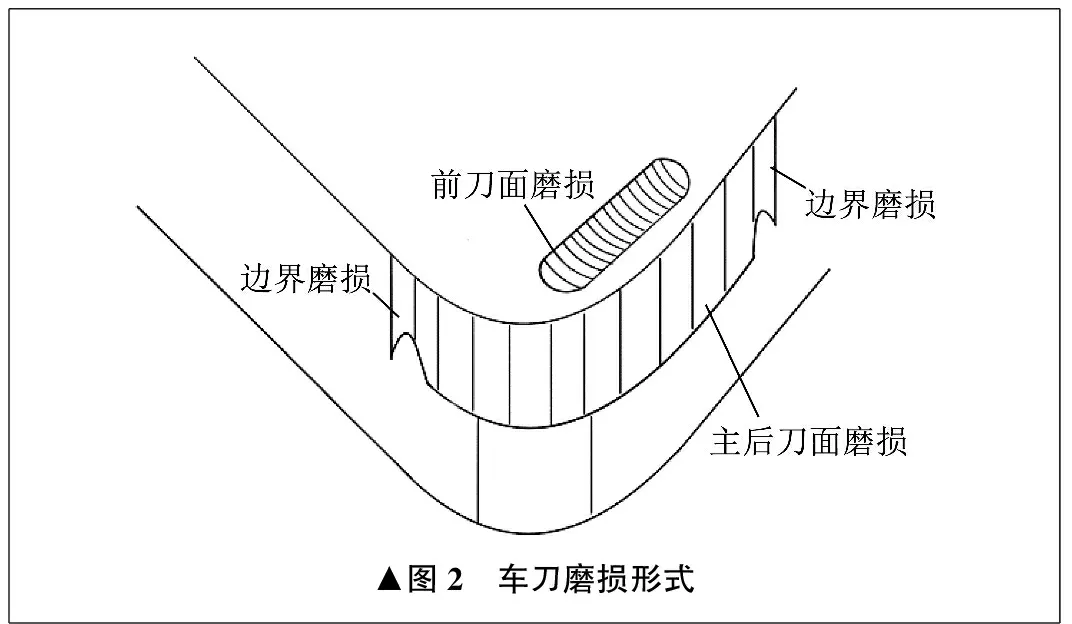
▲圖2 車(chē)刀磨損形式
4 磨損檢測(cè)步驟
為準(zhǔn)確分割出車(chē)刀主后刀面磨損區(qū)域,筆者提出了基于均值漂移與自適應(yīng)閾值分割的刀具磨損檢測(cè)方法,主要包括四個(gè)步驟,如圖3所示。
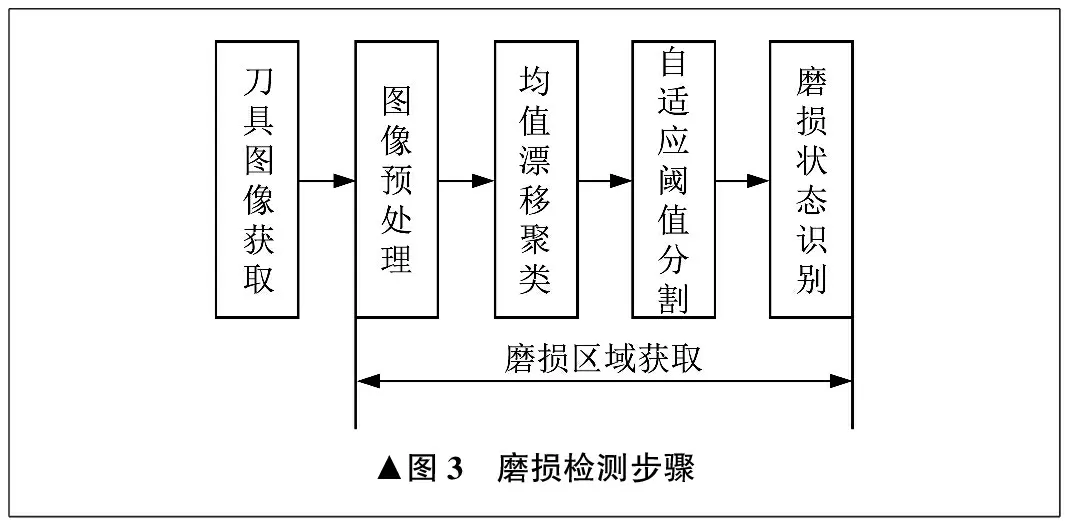
▲圖3 磨損檢測(cè)步驟
步驟一,通過(guò)基于傅里葉變換的頻率域?yàn)V波進(jìn)行圖像預(yù)處理,過(guò)濾高頻噪聲,減小圖像的干擾。
步驟二,通過(guò)均值漂移對(duì)刀具圖像表面紋理特征進(jìn)行聚類(lèi)分析。
步驟三,應(yīng)用自適應(yīng)閾值分割算法準(zhǔn)確分割出刀具磨損區(qū)域。
步驟四,相機(jī)標(biāo)定并計(jì)算磨損區(qū)域相關(guān)尺寸,實(shí)現(xiàn)磨損狀態(tài)的識(shí)別。
5 圖像預(yù)處理
為減小高頻噪聲對(duì)磨損區(qū)域分割的影響,保留主體有效信息,筆者對(duì)刀具原始圖像進(jìn)行頻率域變換,選擇高斯低通濾波器對(duì)圖像進(jìn)行降噪。在頻率域中使用高斯低通濾波器不會(huì)產(chǎn)生較大的振鈴現(xiàn)象和模糊干擾。高斯低通濾波器由函數(shù)H(u,v)確定:
H(u,v)=e-D2(u,v)/2σ2
(1)
式中:(u,v)為頻率域圖像坐標(biāo);D(u,v)為距頻率域矩形中心的距離;σ為關(guān)于像素中心的擴(kuò)展度。
對(duì)σ選取合適大小,代入式(1),得到高斯低通濾波器的函數(shù)表達(dá)式。對(duì)頻譜圖進(jìn)行卷積計(jì)算,得到圖像降噪結(jié)果。圖像降噪過(guò)程如圖4所示。
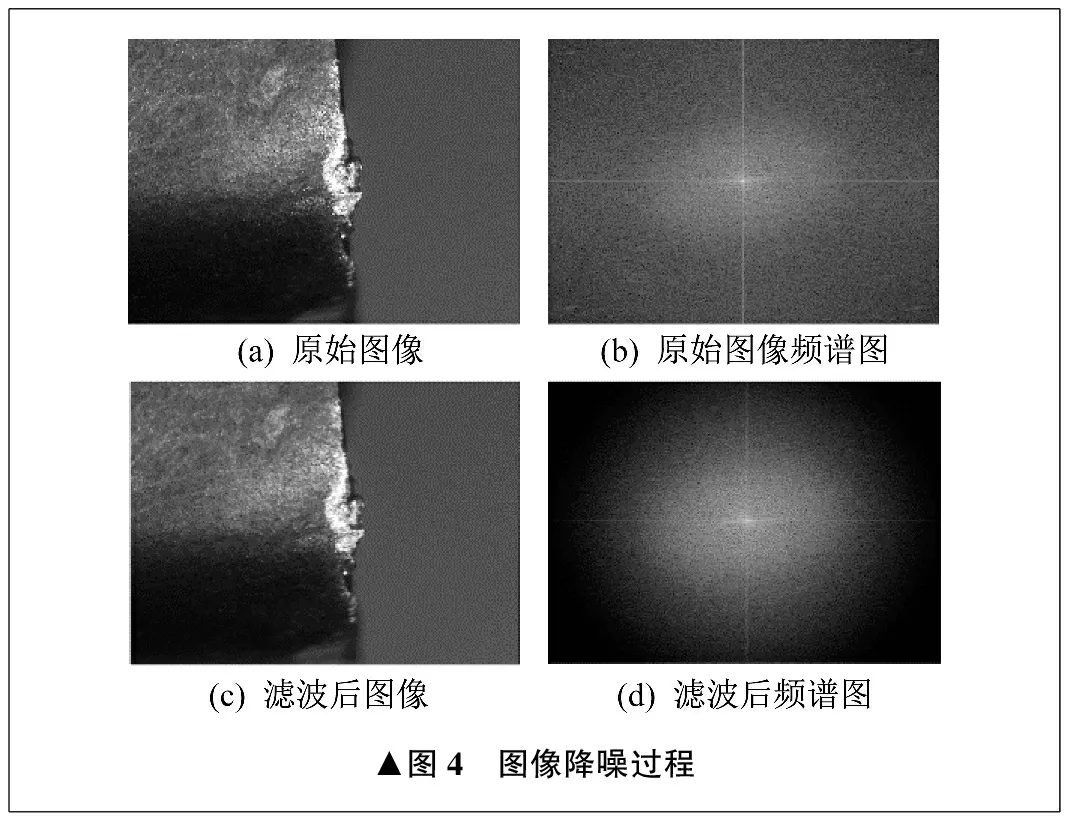
▲圖4 圖像降噪過(guò)程
對(duì)于中心化的傅里葉頻譜圖,中間最亮點(diǎn)為圖像的最低頻率。頻譜圖顯示,頻率隨與中心距離的增大而提高[7]。濾波后頻譜圖四周的高頻信息遠(yuǎn)遠(yuǎn)少于原始圖像頻譜圖,可見(jiàn)過(guò)濾了大量可見(jiàn)與不可見(jiàn)的高頻無(wú)效噪聲信息。
6 均值漂移聚類(lèi)算法
車(chē)刀磨損圖像紋理復(fù)雜,嚴(yán)重干擾了車(chē)刀磨損區(qū)域分割的準(zhǔn)確性。因?yàn)檐?chē)刀磨損局部特征大多呈現(xiàn)聚集狀態(tài),所以在對(duì)車(chē)刀圖像完成無(wú)效噪聲過(guò)濾后,應(yīng)用均值漂移聚類(lèi)提取磨損區(qū)域的特征,在此基礎(chǔ)上應(yīng)用自適應(yīng)閾值方法對(duì)優(yōu)化后的圖像進(jìn)行處理,分割出刀具圖像中的磨損區(qū)域,完成完整的檢測(cè)步驟。筆者所使用的融合算法彌補(bǔ)了常規(guī)閾值分割算法容易受干擾、分割精度不足的缺點(diǎn),算法流程如圖5所示。
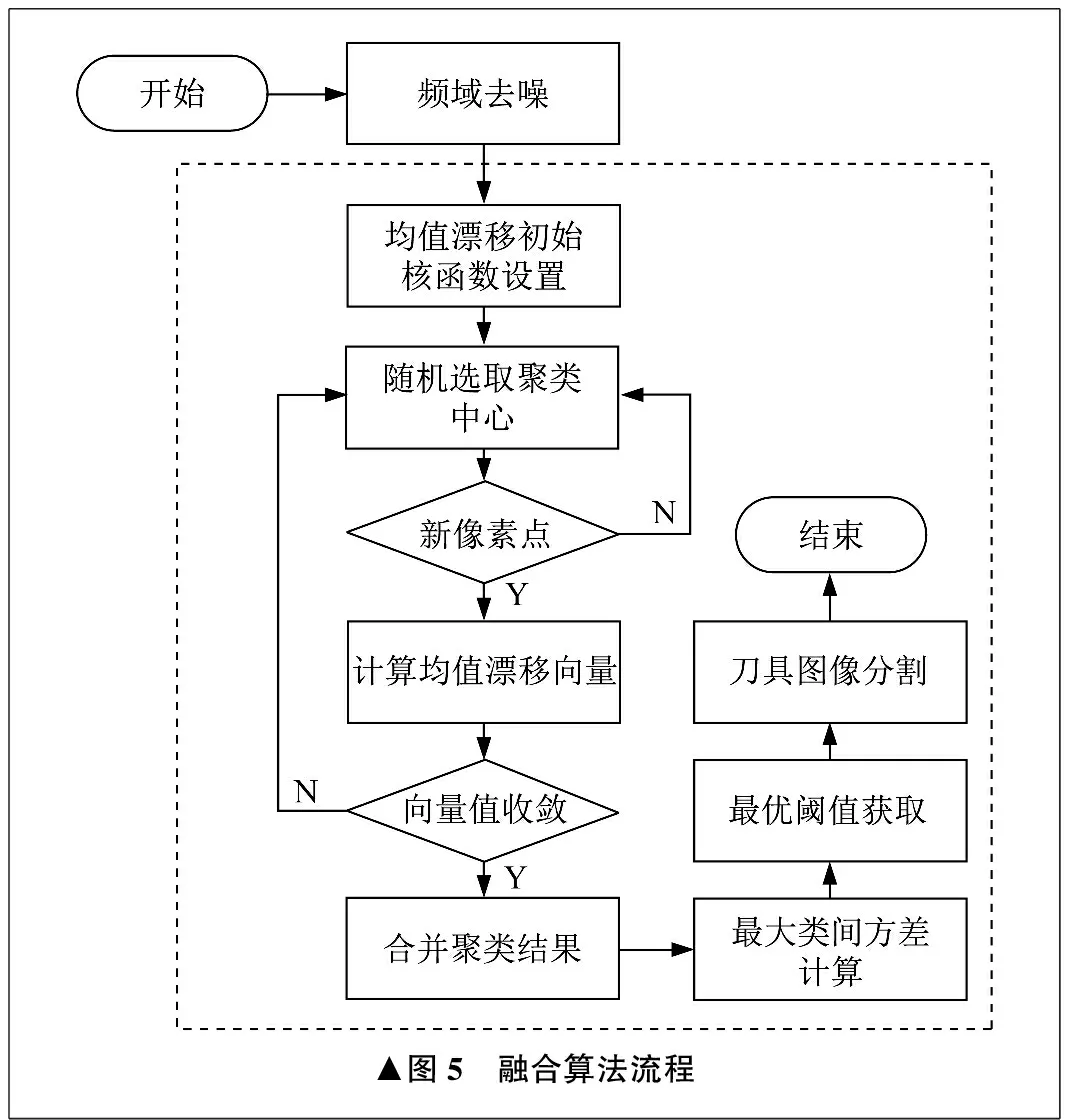
▲圖5 融合算法流程
均值漂移是一種非監(jiān)督的分類(lèi)思想,通過(guò)圖像信息向量化的方式來(lái)表達(dá)圖像像素點(diǎn)及像素點(diǎn)區(qū)域的分類(lèi)方向性[8]。給定取樣點(diǎn)集X={x1,x2,…,xn},M(x)向量的基本形式為:
(2)
式中:Sh為以x為中心點(diǎn)、以h為半徑的高維球型區(qū)域;k為點(diǎn)集X中樣本點(diǎn)落入Sh區(qū)域內(nèi)的數(shù)量;xi為包含在Sh區(qū)域內(nèi)的第i個(gè)樣本點(diǎn);(xi-x)為第i個(gè)樣本點(diǎn)與中心點(diǎn)x的相對(duì)偏移量;M(x)為落入Sh區(qū)域內(nèi)的k個(gè)樣本點(diǎn)的漂移向量和的平均值。
由于樣本點(diǎn)與采樣點(diǎn)之間的距離大小影響了向量強(qiáng)度的有效性與重要性,因此需要在式(2)的基礎(chǔ)上增加核函數(shù)與權(quán)重因數(shù)的概念。
對(duì)式(2)進(jìn)行擴(kuò)展[9],得:
(3)
式中:F(x)為核函數(shù);m為帶寬矩陣;ω(xi)為樣本權(quán)重。
定義均值漂移向量后,還需要進(jìn)行迭代運(yùn)算來(lái)完成聚類(lèi),進(jìn)而進(jìn)行圖像特征的分類(lèi)。迭代思想為給定初始點(diǎn)x,計(jì)算這一點(diǎn)的均值漂移向量,并將該初始點(diǎn)沿所得均值漂移向量方向移動(dòng),得到新的迭代初始點(diǎn),不斷循環(huán),直至收斂到該點(diǎn)附近的最大值。
7 自適應(yīng)閾值分割算法
筆者選用改進(jìn)的最大類(lèi)間方差法來(lái)獲取刀具磨損圖像的全局最優(yōu)分割閾值[10]。算法原理為設(shè)B×N圖像中每個(gè)像素的灰度值為f(p,q),(p,q)為像素坐標(biāo),L為最大灰度級(jí),假定灰度值位于區(qū)間[0,L-1]內(nèi),像素j在圖像中所占的比例P(j)為:
(4)
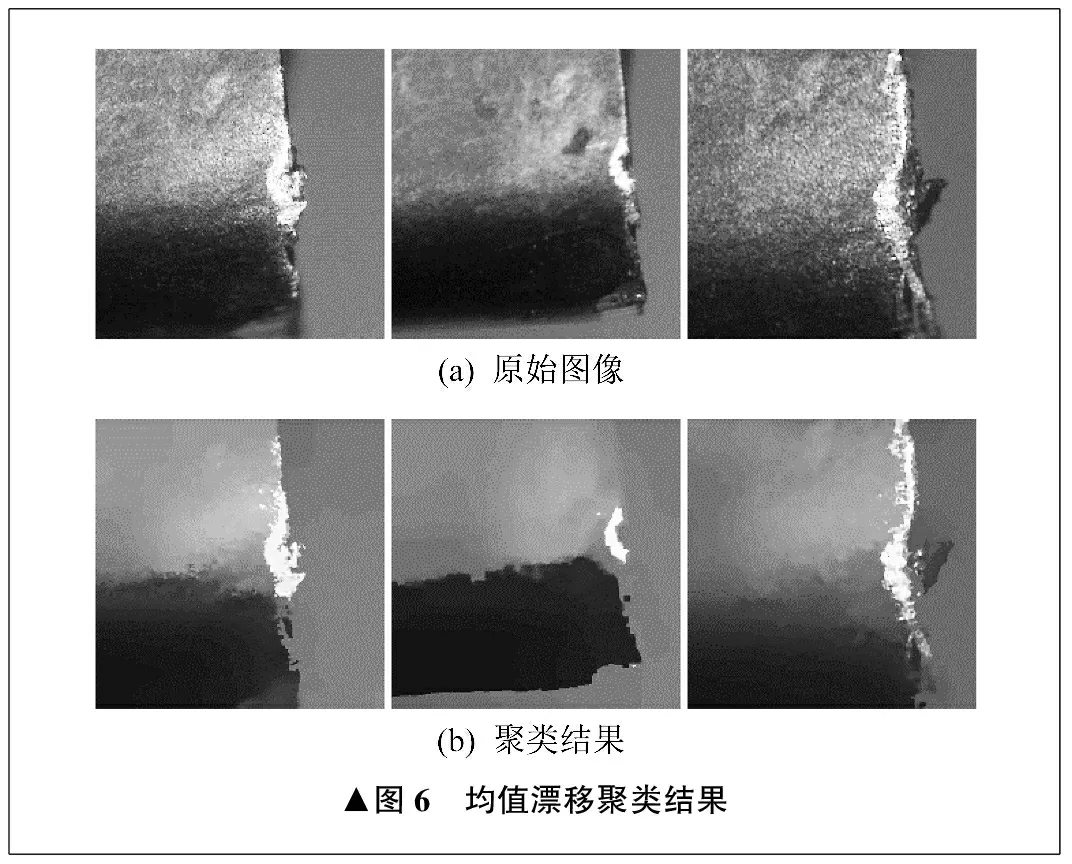
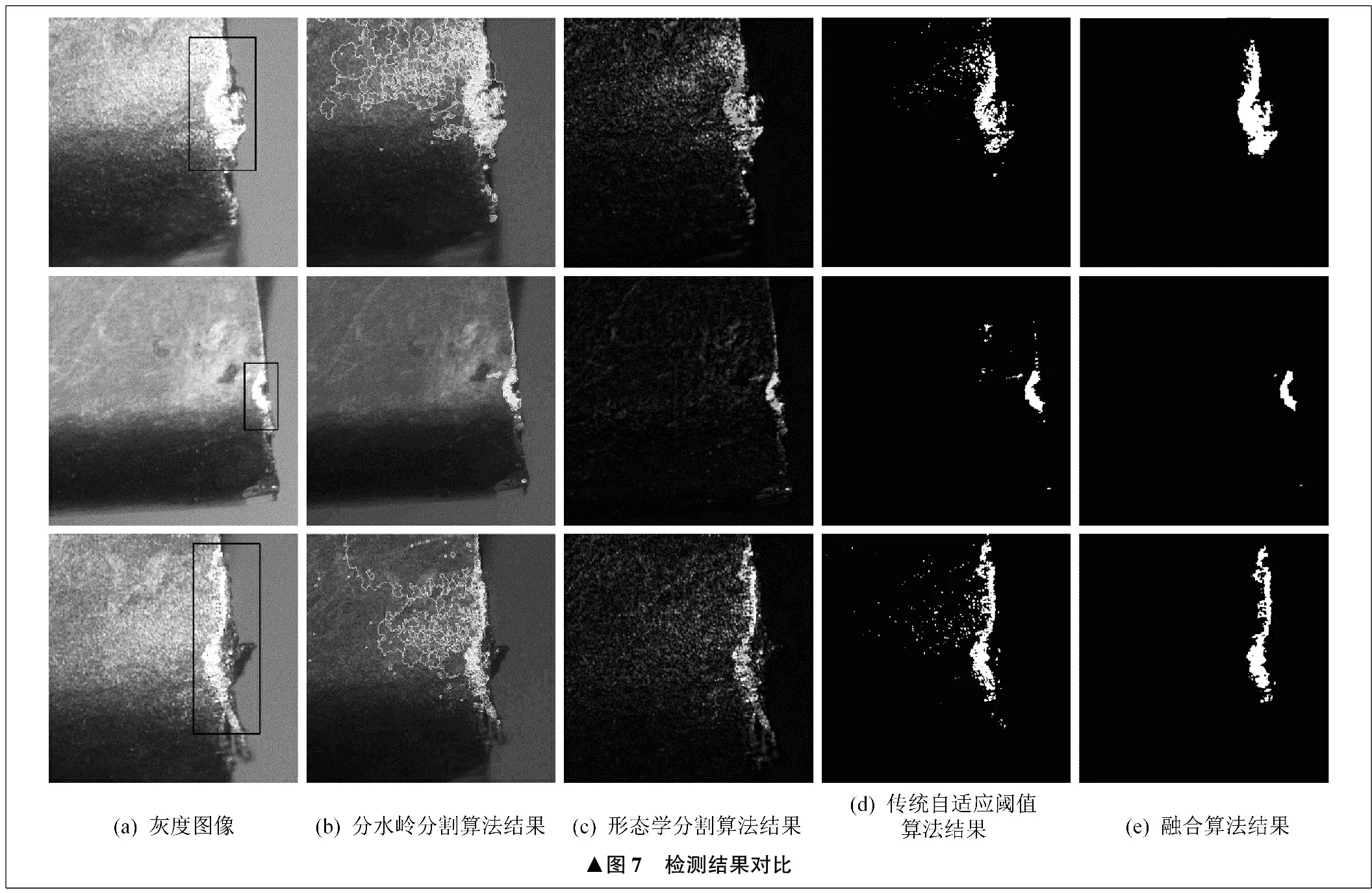
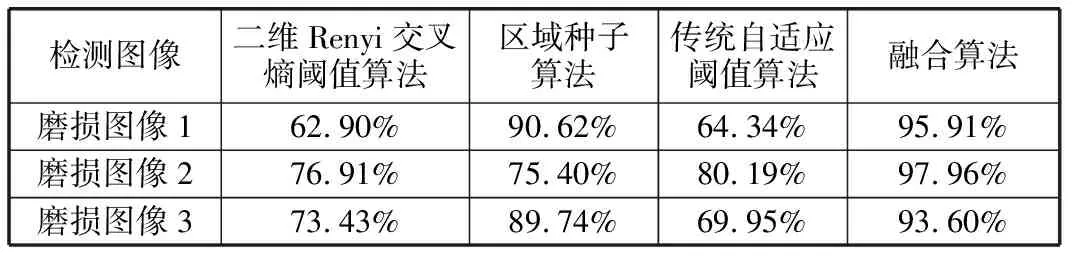
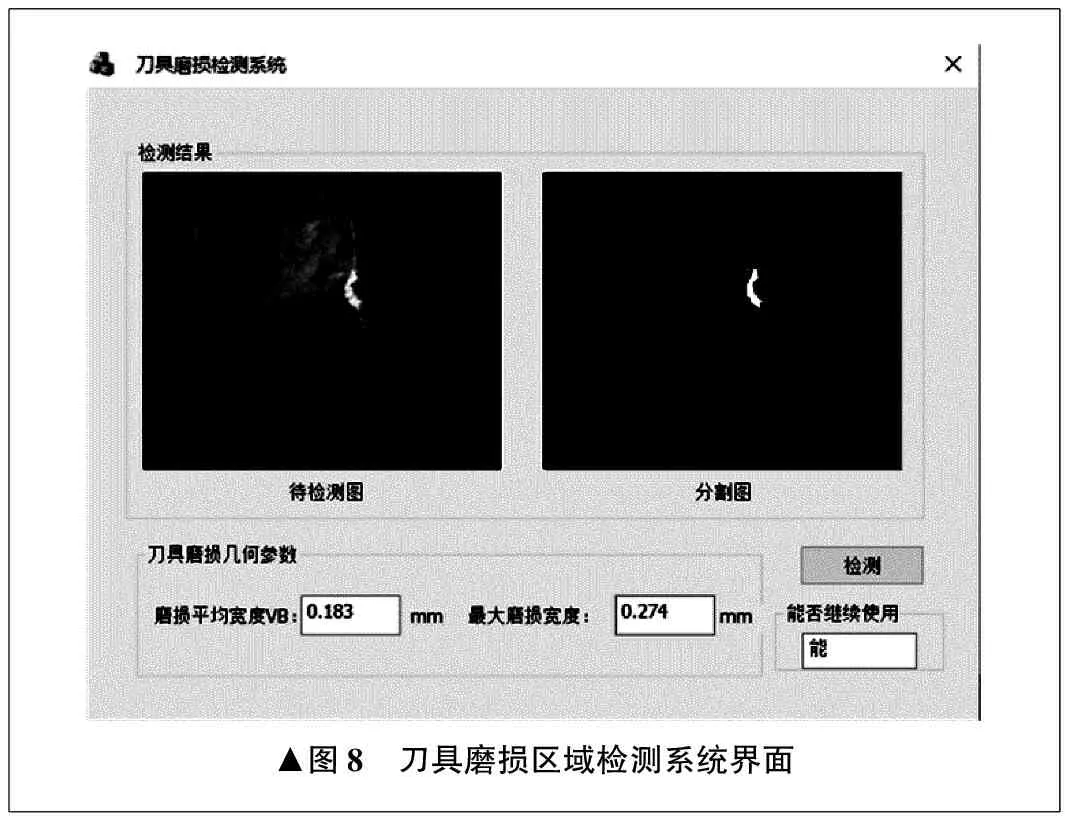
隨機(jī)選定初始閾值t,通過(guò)迭代將圖像分為前景與后景,前景表示為{f(p,q)≤t},后景表示為{t (5) (6) (7) (8) 圖像的總均值μ為: μ=u0(t)v0(t)+u1(t)v1(t) (9) 當(dāng)類(lèi)間方差最大時(shí),獲取自適應(yīng)最優(yōu)閾值Th為: Th=arg max{u0(t)[v0(t)-μ]2+ u1(t)[v1(t)-μ]2} (10) 由式(10)分析可知,類(lèi)間方差越大,所得最優(yōu)閾值越遠(yuǎn)離圖像中心。可見(jiàn),需要盡量增大前景灰度均值v0(t)與后景灰度均值v1(t)之間的差值。設(shè)前景后景插值距離為d(t),有: d2(t)=[v0(t)-v1(t)]2 (11) (12) (13) 考慮距離d(t)與改進(jìn)均值方差兩個(gè)參數(shù)對(duì)閾值獲取的影響,可得改進(jìn)閾值標(biāo)準(zhǔn)函數(shù)G(t)為: (14) 當(dāng)改進(jìn)閾值標(biāo)準(zhǔn)函數(shù)G(t)取最大值時(shí),得到自適應(yīng)最優(yōu)閾值Th為arg max[G(t)]。 為了充分驗(yàn)證筆者所提出算法的可行性與有效性,選取三幅具有不同磨損程度的車(chē)刀主后刀面磨損圖像作為樣本進(jìn)行檢測(cè),同時(shí)以磨損區(qū)域面積的分割準(zhǔn)確率Ar作為分割效果指標(biāo),Ar為: (15) 式中:a為應(yīng)用算法分割得到的磨損區(qū)域像素面積大小;at為手動(dòng)標(biāo)注的磨損區(qū)域像素面積大小。 對(duì)降噪后刀具圖像應(yīng)用均值漂移預(yù)分割,突出磨損區(qū)域特征,聚類(lèi)結(jié)果如圖6所示。 由圖6可以看出,均值漂移簡(jiǎn)化了原始刀具圖像的紋理信息,弱化了無(wú)效區(qū)域的影響,突出了主后刀面的磨損區(qū)域,為后續(xù)自適應(yīng)閾值分割打下良好的基礎(chǔ)。 ▲圖6 均值漂移聚類(lèi)結(jié)果 針對(duì)三幅具有不同磨損程度的車(chē)刀主后刀面磨損圖像,應(yīng)用均值漂移與自適應(yīng)閾值分割融合算法,與傳統(tǒng)檢測(cè)算法進(jìn)行對(duì)比,如圖7所示。由圖7可以發(fā)現(xiàn),傳統(tǒng)的分水嶺分割算法、形態(tài)學(xué)分割算法與自適應(yīng)閾值算法產(chǎn)生了過(guò)度分割的現(xiàn)象,將車(chē)刀正常區(qū)域劃分為磨損區(qū)域,容易導(dǎo)致嚴(yán)重的誤檢測(cè)。筆者提出的融合算法在磨損區(qū)域分割準(zhǔn)確率上有明顯優(yōu)勢(shì),雖然仍然存在過(guò)分割與分割不完整的現(xiàn)象,但是對(duì)于整體的分割檢測(cè)影響較小。由此可見(jiàn),筆者提出的融合算法有較高的分割準(zhǔn)確率,能有效實(shí)現(xiàn)檢測(cè)目標(biāo)。 ▲圖7 檢測(cè)結(jié)果對(duì)比 為定量評(píng)價(jià)筆者提出的融合算法的有效性,采用分割準(zhǔn)確率作為評(píng)價(jià)指標(biāo),并與二維Renyi交叉熵閾值分割算法[11]、區(qū)域種子分割算法[12]、傳統(tǒng)自適應(yīng)閾值分割算法進(jìn)行比較。不同分割算法準(zhǔn)確率比較見(jiàn)表1。與傳統(tǒng)分割算法相比,融合算法在車(chē)刀圖像磨損區(qū)域的分割準(zhǔn)確率方面有較大的優(yōu)勢(shì)。 表1 分割算法分割準(zhǔn)確率比較 通過(guò)上述分析,對(duì)刀具磨損區(qū)域使用融合算法進(jìn)行分割,效果良好。將該算法集成,應(yīng)用微軟基礎(chǔ)類(lèi)庫(kù)與OpenCV視覺(jué)軟件開(kāi)源庫(kù)進(jìn)行視覺(jué)軟件界面與檢測(cè)系統(tǒng)的開(kāi)發(fā)。這一系統(tǒng)可以顯示待檢測(cè)刀具原始圖像與分割磨損結(jié)果圖像,在框選出磨損區(qū)域的同時(shí)可以輸出車(chē)刀的磨損寬度均值、最大磨損寬度等幾何參數(shù),如圖8所示。通過(guò)與硬質(zhì)合金車(chē)刀的磨鈍標(biāo)準(zhǔn)磨損寬度值[13]比對(duì),筆者選取0.6 mm作為磨鈍標(biāo)準(zhǔn)磨損寬度值,來(lái)判斷刀具能否繼續(xù)使用。 ▲圖8 刀具磨損區(qū)域檢測(cè)系統(tǒng)界面 筆者針對(duì)車(chē)刀磨損圖像存在噪聲干擾且紋理復(fù)雜的特點(diǎn),提出了一種基于均值漂移和自適應(yīng)閾值分割的刀具磨損檢測(cè)方法。這一方法采用頻率域?yàn)V波對(duì)原始圖像的高頻噪聲部分進(jìn)行過(guò)濾,對(duì)刀具磨損圖像采用均值漂移與自適應(yīng)閾值融合算法進(jìn)行分割,得到準(zhǔn)確的磨損區(qū)域。同時(shí)搭建了基于機(jī)器視覺(jué)的刀具磨損檢測(cè)平臺(tái)進(jìn)行檢測(cè),結(jié)果表明,筆者提出的融合算法對(duì)刀具磨損區(qū)域的分割準(zhǔn)確率優(yōu)于傳統(tǒng)分割算法,平均分割準(zhǔn)確率高于90%,適用于常見(jiàn)車(chē)刀的磨損區(qū)域檢測(cè)。
8 檢測(cè)結(jié)果分析
9 刀具磨損檢測(cè)系統(tǒng)應(yīng)用
10 結(jié)束語(yǔ)
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
