基于查表法的電勵磁雙凸極電機(jī)建模研究*
2021-07-20 00:56:26明慶永陳志輝封成雙
電機(jī)與控制應(yīng)用 2021年6期
關(guān)鍵詞:模型
明慶永, 陳志輝, 封成雙
(南京航空航天大學(xué) 自動化學(xué)院,江蘇 南京 211100)
0 引 言
電勵磁雙凸極電機(jī)(DSEM)是20世紀(jì)90年代提出的一種新型無刷直流電機(jī)[1-2],在開關(guān)磁阻電機(jī)的基礎(chǔ)上發(fā)展而來[3-4]。其定轉(zhuǎn)子呈雙凸極結(jié)構(gòu),定子上安裝有電樞繞組和勵磁繞組,轉(zhuǎn)子無繞組。DSEM因具有結(jié)構(gòu)簡單、可靠性高、勵磁可調(diào)、控制靈活等優(yōu)點,獲得了廣泛關(guān)注[5]。
由于DSEM定子與轉(zhuǎn)子均呈現(xiàn)凸極結(jié)構(gòu),磁場的邊緣效應(yīng)和飽和現(xiàn)象也比較嚴(yán)重[6],其電感等參數(shù)也隨著電機(jī)運(yùn)行狀態(tài)不同而變化。DSEM電樞繞組與勵磁繞組間的互感使磁場分布更為復(fù)雜,電樞電流對電感波形影響的分析也更加困難[7-8]。關(guān)于DSEM建模的研究較少,對其進(jìn)一步深入研究具有較大實用意義。DSEM建模方法可分為近似線性建模和非線性建模,多數(shù)研究主要是對DSEM電感進(jìn)行建模。文獻(xiàn)[9-10]對電感進(jìn)行分段線性近似,將等效電感建模法運(yùn)用于DSEM。文獻(xiàn)[11]將一個周期內(nèi)電感曲線分為6段,分別用正弦函數(shù)和直線近似擬合各段電感曲線,將其依次相連,即可構(gòu)造連續(xù)可導(dǎo)的分段線性電感模型。以上所述近似線性建模方法均是在忽略磁飽和影響,不考慮電感隨電流發(fā)生變化的前提下建立的,因此所建模型誤差較大。雙凸極電機(jī)實際模型呈高度非線性,在近似線性方法基礎(chǔ)上,形成精度較高的非線性建模方法,能夠更精確地反映實際電磁關(guān)系。文獻(xiàn)[12]提出自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)建立雙凸極永磁電機(jī)模型的方法,采用改進(jìn)的遞推最小二乘法修改網(wǎng)絡(luò)參數(shù),同時采用遺傳算法對遺忘因子和學(xué)習(xí)率進(jìn)行了優(yōu)化。文獻(xiàn)[13]將基于T-S模糊推理的模糊神經(jīng)網(wǎng)絡(luò)模型應(yīng)用于DSEM非線性建模中,考慮了磁路的局部飽和效應(yīng)的影響。模糊神經(jīng)網(wǎng)絡(luò)建模方法是用模糊神經(jīng)網(wǎng)絡(luò)來逼近各相磁鏈與勵磁電流、相電流及轉(zhuǎn)子位置角之間的非線性關(guān)系。其模型逼近精度與隸屬度函數(shù)中模糊子集個數(shù)有密切關(guān)系,個數(shù)越多,逼近精度越高,但同時模糊推理模型中的規(guī)則數(shù)及參數(shù)也隨之急劇增加,訓(xùn)練時間大大增加。文獻(xiàn)[14]利用獲得的繞組自感和磁鏈數(shù)據(jù),基于Look-up table模塊,查詢不同轉(zhuǎn)子位置角度對應(yīng)的自感及磁鏈的值,搭建了基于MATLAB/Simulink的電機(jī)模型。文獻(xiàn)[15]通過分析DSEM自身電感特性以及勵磁磁場與電樞反應(yīng)對電感的影響,擬合出了同時考慮勵磁電流和電樞電流的影響系數(shù),建立了Lp及Lpf的模型。此外,有限元法是目前主流的非線性建模方法。文獻(xiàn)[16-18]通過有限元仿真的方法對電機(jī)的磁鏈、感應(yīng)電動勢等進(jìn)行仿真,具有仿真結(jié)果準(zhǔn)確的優(yōu)點。但是有限元仿真耗時長,仿真效率低。
為了便于電機(jī)控制策略的選取及控制參數(shù)的整定,提高仿真效率,本文利用三維查表法建立了DSEM模型。在深入分析DSEM電磁特性基礎(chǔ)上,利用有限元法建立了磁鏈特性ψp(ip,if,θ)與轉(zhuǎn)矩特性Tp(ip,if,θ)的三維數(shù)據(jù)表。基于電壓、磁鏈和轉(zhuǎn)矩方程,并考慮勵磁磁鏈的影響搭建了DSEM磁鏈和轉(zhuǎn)矩模型,不僅解決了電樞繞組電壓方程的建模問題,也解決了勵磁繞組電壓方程和電磁轉(zhuǎn)矩精確建模的兩大問題。同時,將仿真結(jié)果與有限元法比較,以驗證所建模型的準(zhǔn)確性。最后,利用本文方法所建模型仿真分析了勵磁電流采用滯環(huán)控制時的空載反電動勢特性以及電樞電流采用不對稱電流控制策略時的電流特性,并與有限元及試驗測試結(jié)果相比較,驗證了本文建模方法的有效性,并為該類電機(jī)后續(xù)閉環(huán)控制研究奠定基礎(chǔ)。
1 DSEM結(jié)構(gòu)及電磁特性分析
1.1 DSEM基本結(jié)構(gòu)
本文研究內(nèi)容是基于一臺1 kW的四相8/6極DSEM展開的,轉(zhuǎn)子極寬度比定子極寬度機(jī)械角加寬5°。圖1給出了四相8/6極DSEM的剖面圖。該電機(jī)的主要結(jié)構(gòu)和繞組數(shù)據(jù)如表1所示。
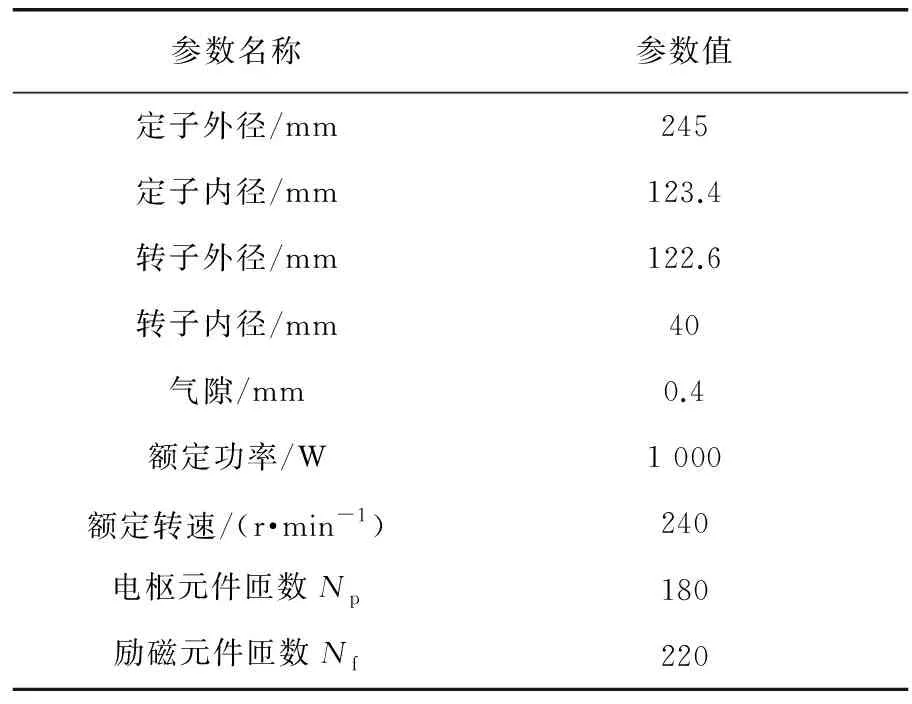
表1 8/6極四相DSEM主要參數(shù)
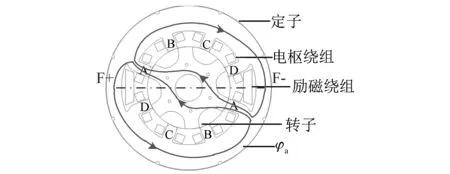
圖1 剖面圖
該四相DSEM共有8個定子極, 6個轉(zhuǎn)子極。8個定子齒構(gòu)成了6個小定子槽和2個大定子槽。小槽中僅放置電樞繞組,大槽中放置電樞繞組和勵磁繞組,相對的2個定子極上的電樞繞組串聯(lián)構(gòu)成一相,分別形成A相、B相、C相和D相。電樞繞組和勵磁繞組之間存在電磁耦合關(guān)系。圖2為8/6極DSEM展開圖,沿著轉(zhuǎn)子旋轉(zhuǎn)方向,電樞繞組相序為C→B→A→D。本文定義電機(jī)正方向為逆時針旋轉(zhuǎn)方向。
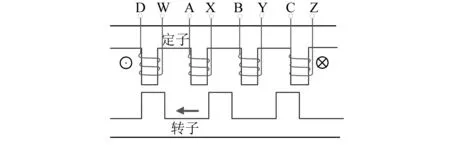
圖2 展開圖
1.2 DSEM電磁特性分析
DSEM每相繞組匝鏈的磁鏈由電樞繞組與勵磁繞組間互感磁鏈、電樞繞組相間互感磁鏈以及電樞繞組自感磁鏈構(gòu)成,是關(guān)于電樞電流、勵磁電流以及轉(zhuǎn)子位置角的函數(shù)應(yīng)變量。以A相為例,其表達(dá)式為
ψa(ia,ib,ic,id,if,θ)=ψaf+ψaa+ψab+ψac+ψad=
Lafif+Laia+Labib+Lacic+Ladid
(1)
由圖3可以看出,與電樞繞組與勵磁繞組間的互感Laf以及電樞繞組自感Laa相比,電樞繞組之間的互感Lab很小,因此相間互感磁鏈可以忽略不計,即A相磁鏈可以簡化為
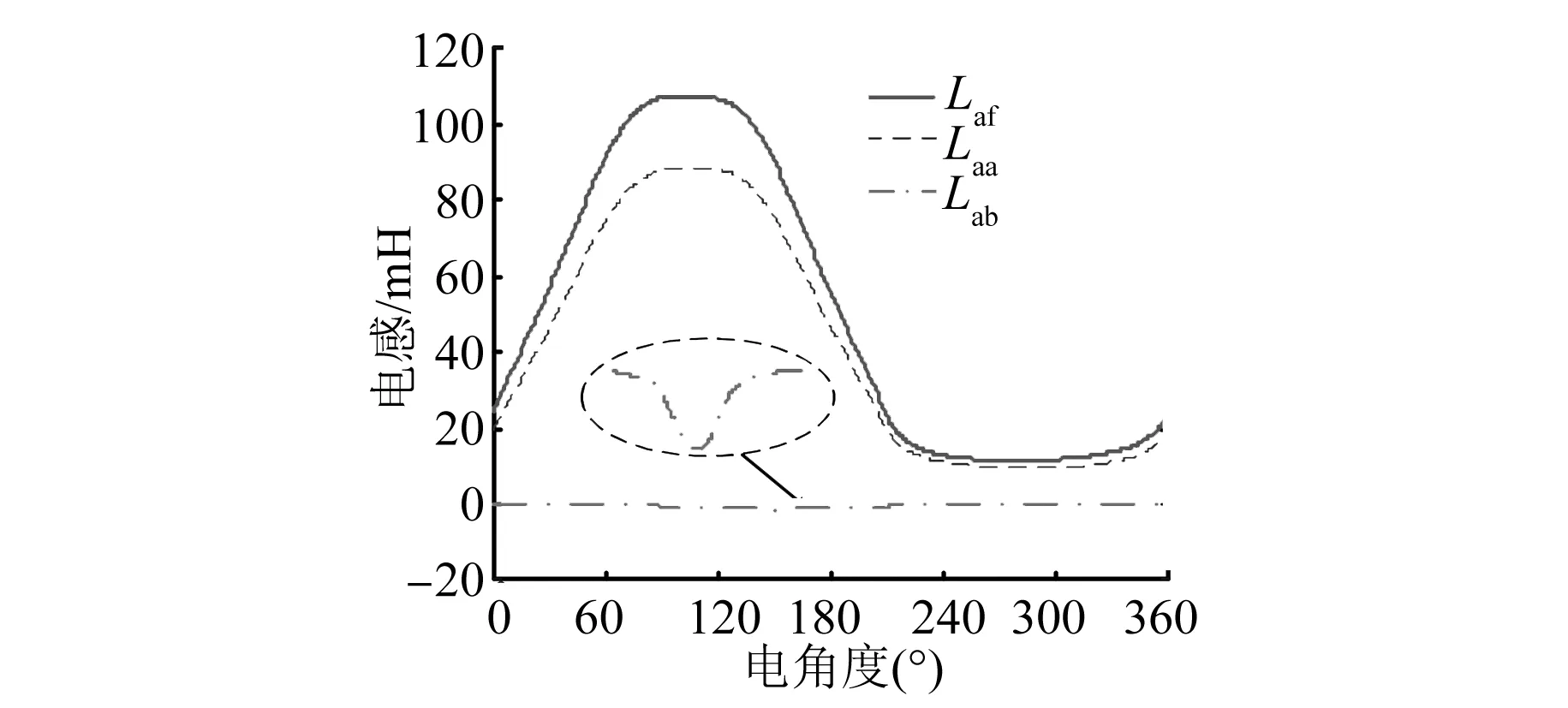
圖3 電感波形
ψa(ia,if,θ)=ψaf+ψaa
(2)
由式(2)可知,相磁鏈?zhǔn)顷P(guān)于對應(yīng)相電樞電流、勵磁電流及轉(zhuǎn)子位置角的應(yīng)變量,三者作為輸入量即可確定對應(yīng)狀態(tài)的輸出磁鏈。
同理,勵磁磁鏈的計算式為
ψf=Lfaia+Lfbib+Lfcic+Lfdid+Lfif
(3)
由圖1可知,穿過F+—F-平面的磁通即為勵磁繞組在轉(zhuǎn)子側(cè)的磁通量。根據(jù)磁通的連續(xù)性,則該磁通在定子側(cè)分別進(jìn)入A、B、C、D各相定子。若忽略通過定子槽較小的勵磁漏磁通,則:
φf=φa+φb+φc+φd
(4)
式中:φa、φb、φc、φd分別為A、B、C、D相與勵磁匝鏈的磁通;φf為勵磁磁通。
由磁通與磁鏈的關(guān)系,可得知勵磁磁鏈表達(dá)式為
ψf=(ψa+ψb+ψc+ψd)×Nf/Np
(5)
式中:Nf和Np分別為勵磁繞組匝數(shù)和電樞繞組匝數(shù)。

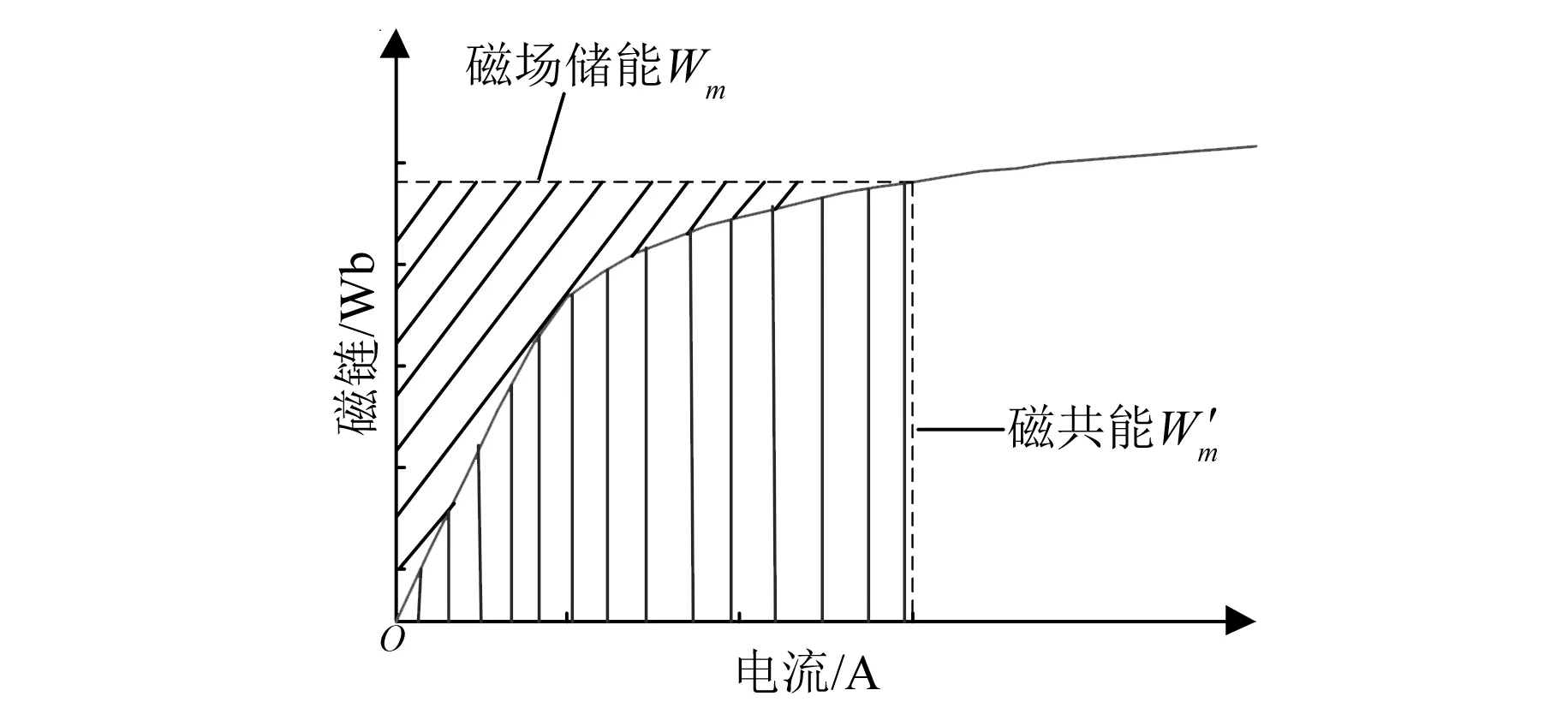
圖4 DSEM磁場儲能與磁共能

(6)
(7)

(8)
根據(jù)機(jī)電能量轉(zhuǎn)換原理可知,四相DSEM是一個多邊激勵系統(tǒng),其激勵分別為電樞激勵和勵磁激勵,即磁共能表達(dá)式為


(9)
將式(9)代入式(8)可得:
(10)
即有:
Te=Ta+Tb+Tc+Td+Tcog
(11)
式中:Ta,Tb,Tc,Td分別為A、B、C、D各相勵磁轉(zhuǎn)矩與磁阻轉(zhuǎn)矩之和。Tcog為電樞電流為零,僅通入勵磁電流產(chǎn)生的齒槽轉(zhuǎn)矩。由式(11)可知,當(dāng)只有A相通入電流時,電機(jī)單相輸出轉(zhuǎn)矩TeA為
TeA(ia,if,θ)=Ta+Tcog
(12)
2 非線性建模
有限元法是目前對DSEM進(jìn)行數(shù)學(xué)分析的主流手段,具有結(jié)果準(zhǔn)確的顯著優(yōu)點,但其耗時長,仿真效率低。依據(jù)第1節(jié)理論分析可知,DSEM非線性數(shù)學(xué)模型由磁鏈方程、電壓方程和轉(zhuǎn)矩方程構(gòu)成。由于DSEM高度非線性和強(qiáng)耦合性,采用常規(guī)擬合方法進(jìn)行建模,過程較為復(fù)雜。本文采用查表法,依據(jù)式(2)和式(5)分別建立相磁鏈和勵磁磁鏈模型。依據(jù)式(12)建立其單相轉(zhuǎn)矩模型,各單相轉(zhuǎn)矩疊加后,對多余的齒槽轉(zhuǎn)矩進(jìn)行扣除,即可得到電磁轉(zhuǎn)矩。
DSEM電壓方程為
um=imRm-em
(13)
反電動勢方程為
(14)
式中:m=a,b,c,d,f。依據(jù)式(13)和式(14)建立其電樞繞組和勵磁繞組電壓模型。
利用有限元仿真軟件ANSYS Maxwell 2D對電機(jī)進(jìn)行建模和仿真,對電機(jī)運(yùn)行過程中瞬時參數(shù)計算,主要包括磁鏈、轉(zhuǎn)子位置角、轉(zhuǎn)矩等。在獲得磁鏈和轉(zhuǎn)矩數(shù)據(jù)后,對其建立輸入量為電樞電流、勵磁電流及轉(zhuǎn)子角位置、輸出量分別為磁鏈和單相轉(zhuǎn)矩的數(shù)據(jù)表格,并通過Simulink平臺中2-D Look-up table模塊進(jìn)行數(shù)據(jù)查表,輸出對應(yīng)控制狀態(tài)下的磁鏈和單相轉(zhuǎn)矩,建模總體過程如圖5所示。
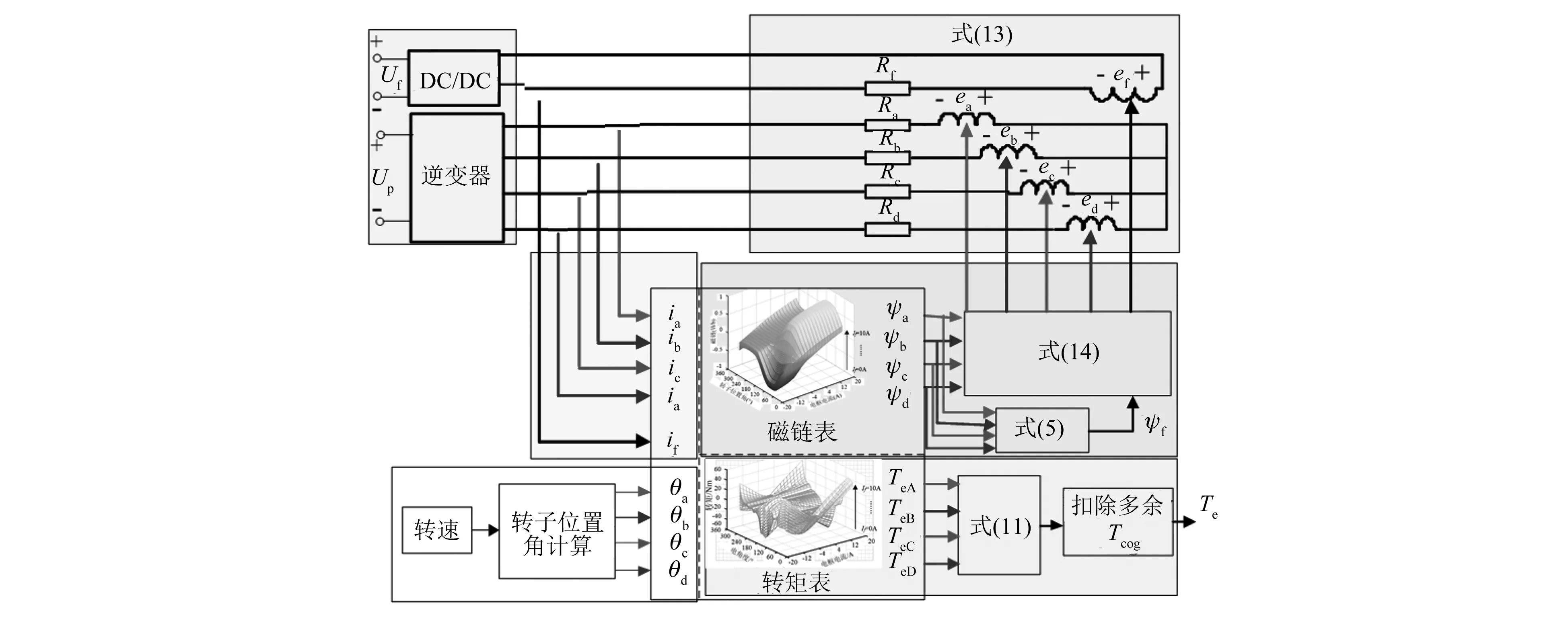
圖5 DSEM非線性建模總體過程框圖
2.1 有限元仿真數(shù)據(jù)獲取
利用有限元仿真軟件ANSYS Maxwell 2D建立電機(jī)模型,并通過靜態(tài)仿真得到磁鏈及電磁轉(zhuǎn)矩數(shù)據(jù)表。在電樞與勵磁繞組施加不同激勵電流,電樞電流為-10~20 A,電樞電流增量Δip設(shè)置為2 A;勵磁電流為0~10 A,勵磁電流增量Δif設(shè)置為1 A;轉(zhuǎn)子角位置角增量Δθ設(shè)置為0.6°。磁鏈數(shù)據(jù)與轉(zhuǎn)矩數(shù)據(jù)獲取流程圖如圖6所示,分為三層循環(huán),分別為外層勵磁電流循環(huán)、中間層電樞電流循環(huán)、內(nèi)層轉(zhuǎn)子位置角循環(huán),最終獲得不同勵磁電流、不同電樞電流和不同轉(zhuǎn)子位置角組合下對應(yīng)的磁鏈與轉(zhuǎn)矩值。不同狀態(tài)下對應(yīng)的磁鏈和轉(zhuǎn)矩曲面圖分別如圖7和圖8所示。
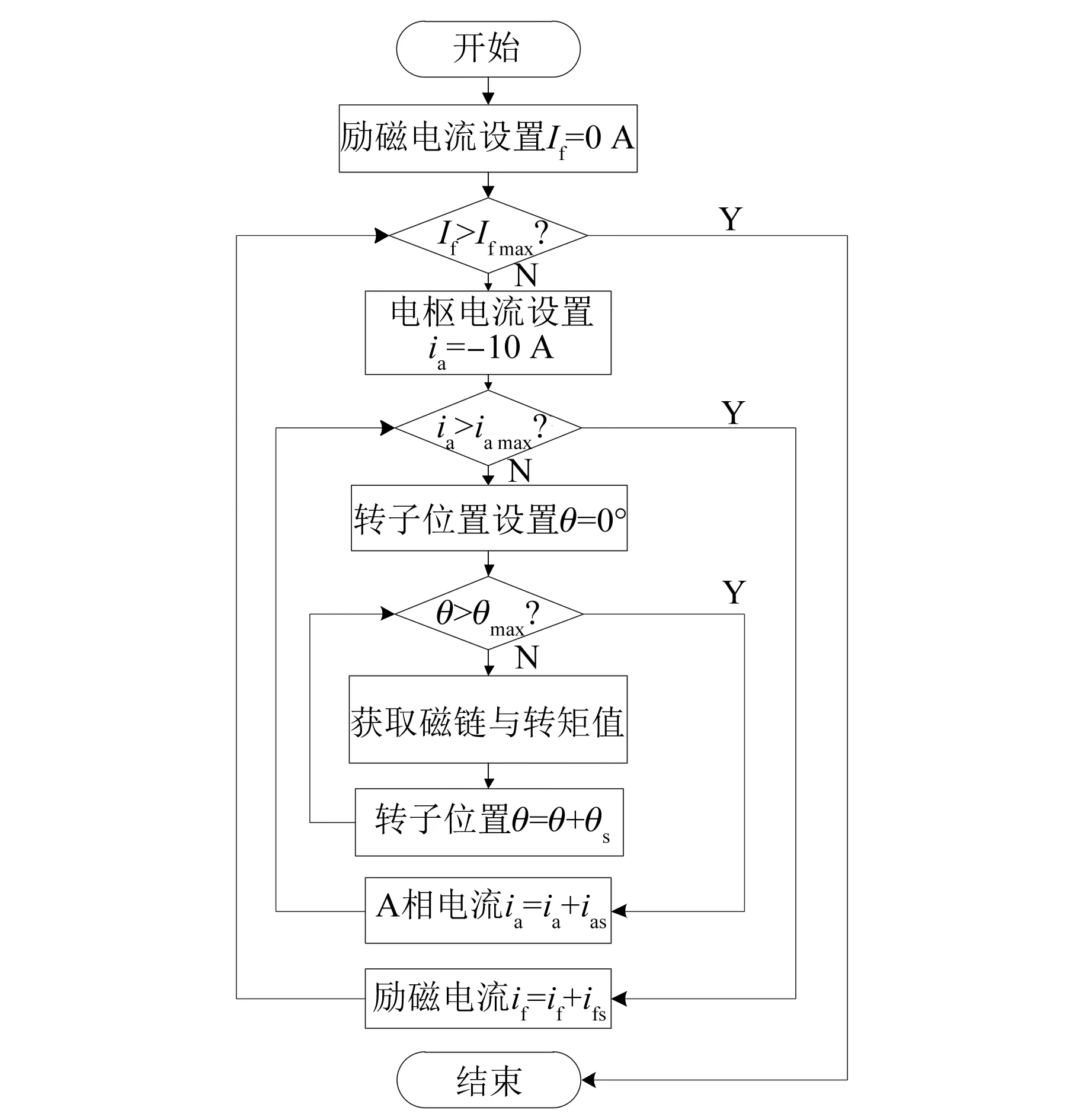
圖6 磁鏈與轉(zhuǎn)矩數(shù)據(jù)獲取流程圖
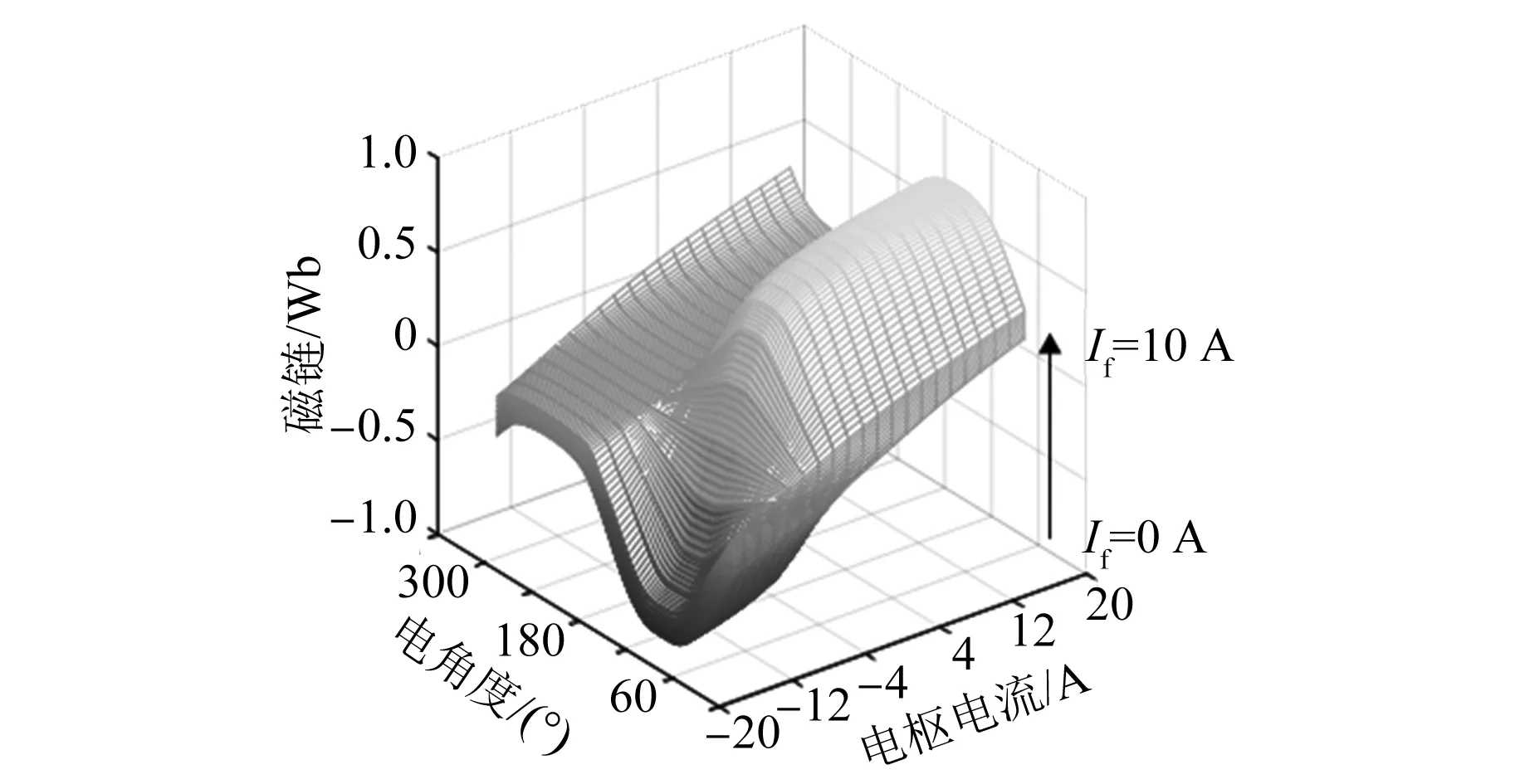
圖7 不同狀態(tài)下磁鏈曲面圖
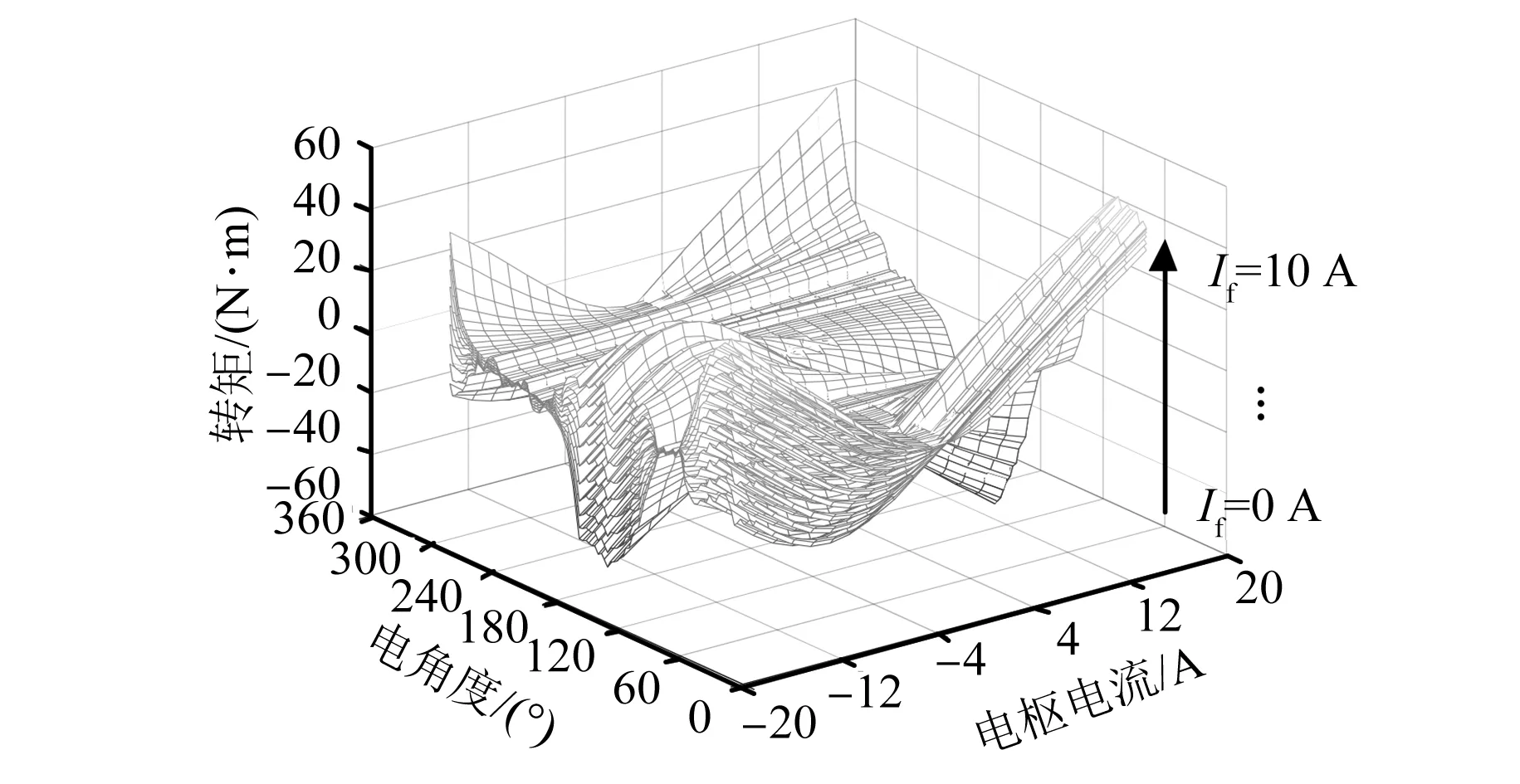
圖8 不同狀態(tài)下轉(zhuǎn)矩曲面圖
2.2 MATLAB/Simulink電機(jī)模型建立
2.2.1 磁鏈模型
由于各相磁鏈?zhǔn)顷P(guān)于對應(yīng)相電樞電流以及勵磁電流和轉(zhuǎn)子位置角的應(yīng)變量,因此可通過三維查表的方式得到各狀態(tài)下的磁鏈。將有限元仿真獲取的數(shù)據(jù)導(dǎo)入3-D Look-up table模塊,建立三維數(shù)據(jù)表。然后根據(jù)轉(zhuǎn)子位置角θ、電樞電流ia和勵磁電流If3個輸入量,查表輸出對應(yīng)的相磁鏈ψp,如圖9所示。由于在采用有限元軟件仿真時,各輸入量增量不可能接近無窮小,因此有限元計算得到的磁鏈仍然是離散的量。為了得到DSEM在任意狀態(tài)時的磁鏈值(電流、轉(zhuǎn)子位置角均在索引范圍內(nèi)),需要對獲取的磁鏈數(shù)據(jù)進(jìn)行插值計算。根據(jù)式(14),對查表磁鏈值進(jìn)行微分計算,即可得到繞組反電動勢。分別采用有限元法與查表法計算得到磁鏈比較波形及反電動勢比較波形如圖10所示,二者磁鏈最大誤差僅為0.6%,空載反電動勢最大誤差為3.2%,誤差產(chǎn)生主要原因是本文建模忽略了相繞組之間的互感。
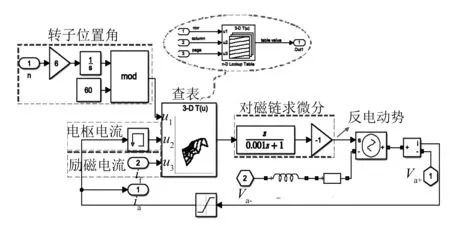
圖9 相磁鏈模型
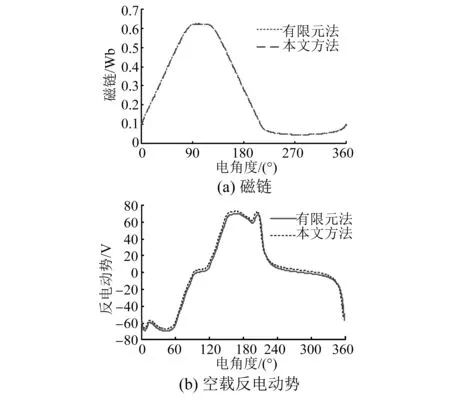
圖10 磁鏈與空載反電動勢波形比較
除了電樞繞組磁鏈模型,本文還考慮了勵磁繞組磁鏈,依據(jù)式(5)搭建勵磁繞組磁鏈模型,如圖11所示。
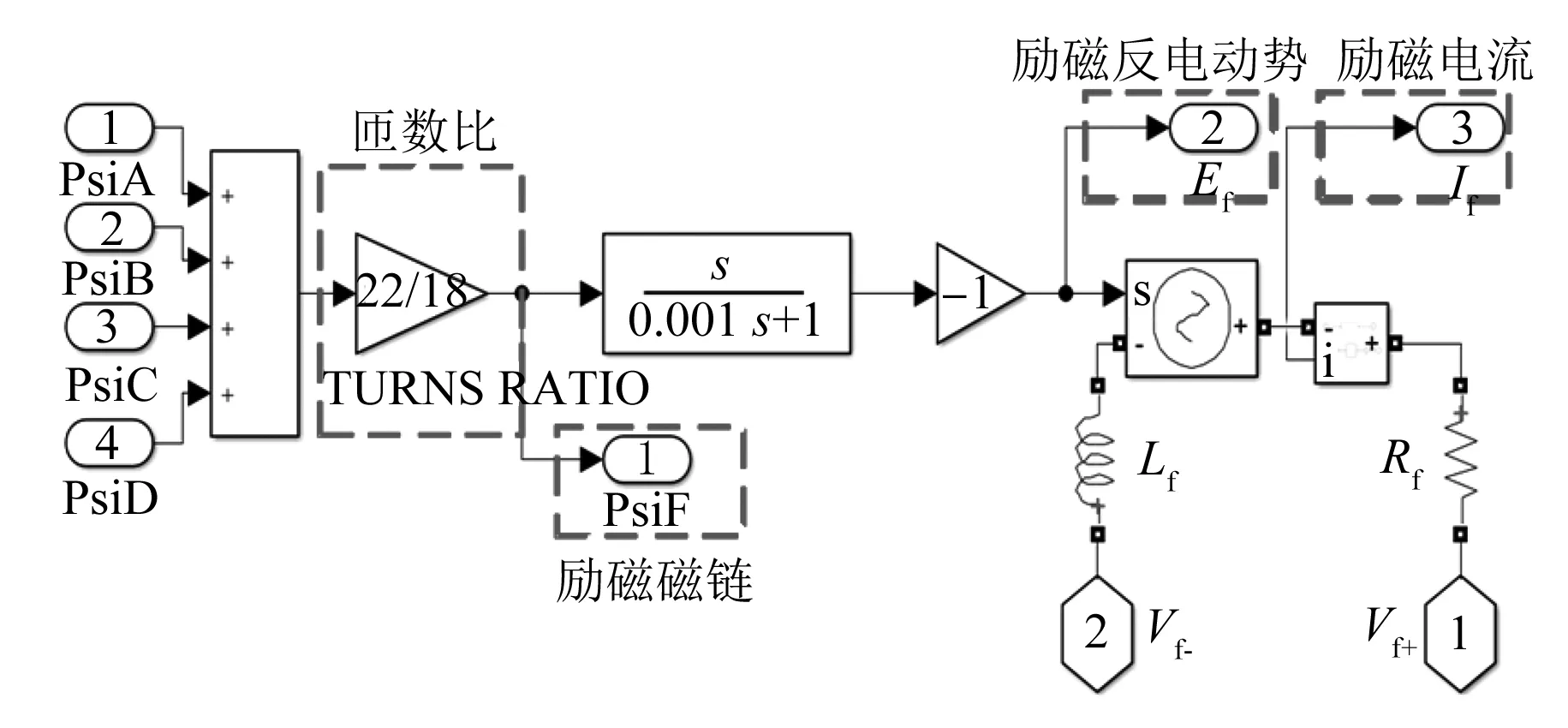
圖11 勵磁磁鏈模型
2.2.2 轉(zhuǎn)矩模型
輸出轉(zhuǎn)矩也是關(guān)于電樞電流、勵磁電流及轉(zhuǎn)子角位置的函數(shù)應(yīng)變量,因此也可采用與磁鏈模型相同的查表法輸出A相轉(zhuǎn)矩, A相轉(zhuǎn)矩模型如圖12所示。B、C、D相轉(zhuǎn)矩通過相位關(guān)系得到,機(jī)械轉(zhuǎn)子角位置分別滯后A相15°、30°和45°。圖13為單相轉(zhuǎn)矩波形對比圖,單相轉(zhuǎn)矩最大誤差為1.2%,可以發(fā)現(xiàn),二者吻合度很高,驗證了該環(huán)節(jié)的有效性。
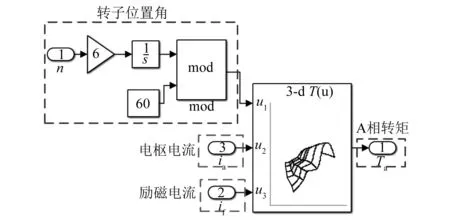
圖12 A相轉(zhuǎn)矩模型
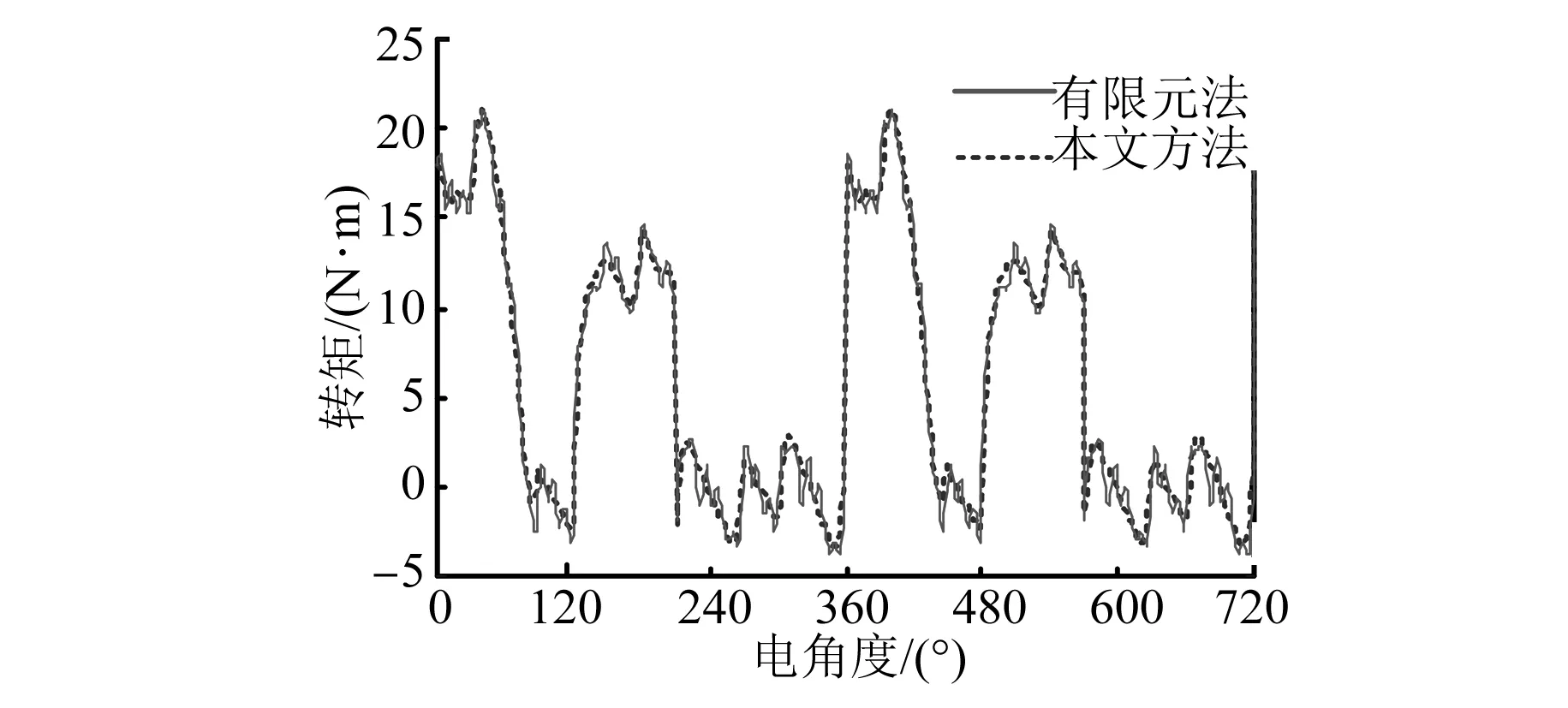
圖13 單相轉(zhuǎn)矩波形對比
但是需要注意,若將Simulink查表插值計算得到的單相轉(zhuǎn)矩直接進(jìn)行疊加得到的電磁轉(zhuǎn)矩與有限元計算得到的電磁轉(zhuǎn)矩存在一定的差異性,如圖14所示。從二者波形對比可以看出,2條曲線差異較大,Simulink插值法得到的轉(zhuǎn)矩幅值要明顯小于有限元法所得到的結(jié)果。從表2可以看出,當(dāng)電機(jī)處于“空載”狀態(tài)時,2種建模方法計算得到的平均轉(zhuǎn)矩誤差最大。由式(12)可知,這是因為將Simulink插值法計算得到的各單相轉(zhuǎn)矩疊加,導(dǎo)致電磁轉(zhuǎn)矩重復(fù)計算了4次齒槽轉(zhuǎn)矩Tcog。因此,需要對多余的齒槽轉(zhuǎn)矩進(jìn)行扣除。
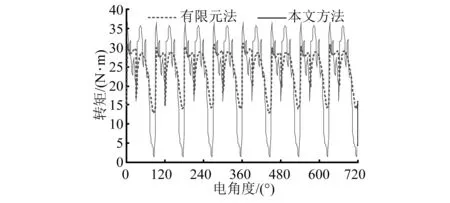
圖14 扣除前輸出轉(zhuǎn)矩波形對比
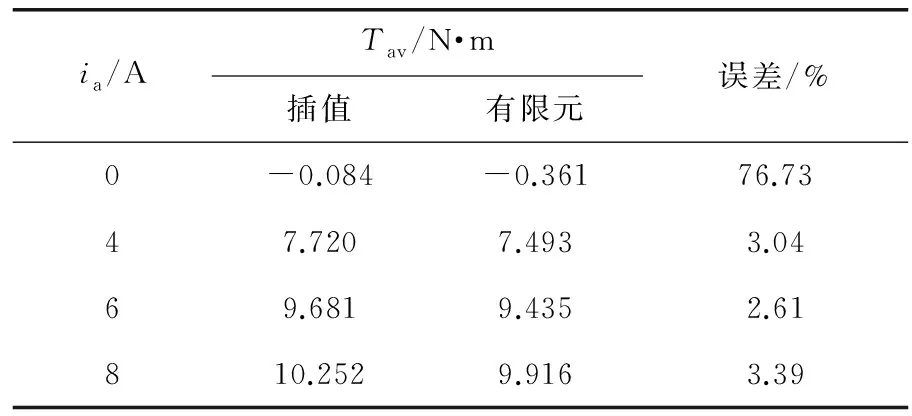
表2 平均轉(zhuǎn)矩比較及誤差
將每相的齒槽轉(zhuǎn)矩之和的3/4倍作為電磁轉(zhuǎn)矩的扣除量,轉(zhuǎn)矩扣除模塊如圖15所示。多余齒槽轉(zhuǎn)矩扣除后的電磁轉(zhuǎn)矩波形對比如圖16所示。從對比結(jié)果來看,2種方法得到的波形吻合程度較高。不吻合現(xiàn)象主要發(fā)生在轉(zhuǎn)矩峰值處,這是因為在建模時為了合理簡化電機(jī)模型,認(rèn)為各相是對稱的,只對A相繞組通入電流得到查表數(shù)據(jù),但實際上電機(jī)各相并非完全對稱,因此產(chǎn)生了較小的誤差。
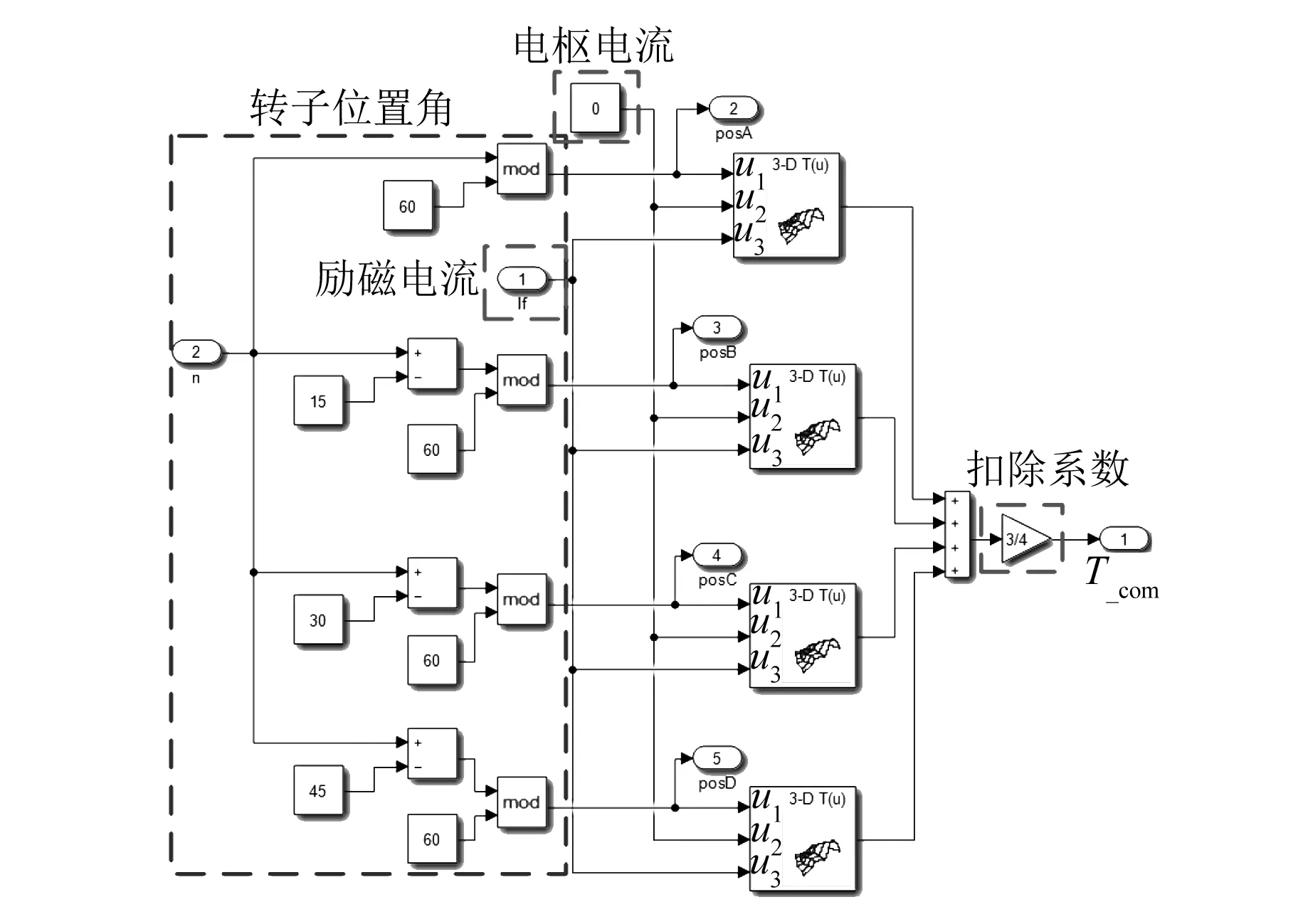
圖15 齒槽轉(zhuǎn)矩扣除模塊
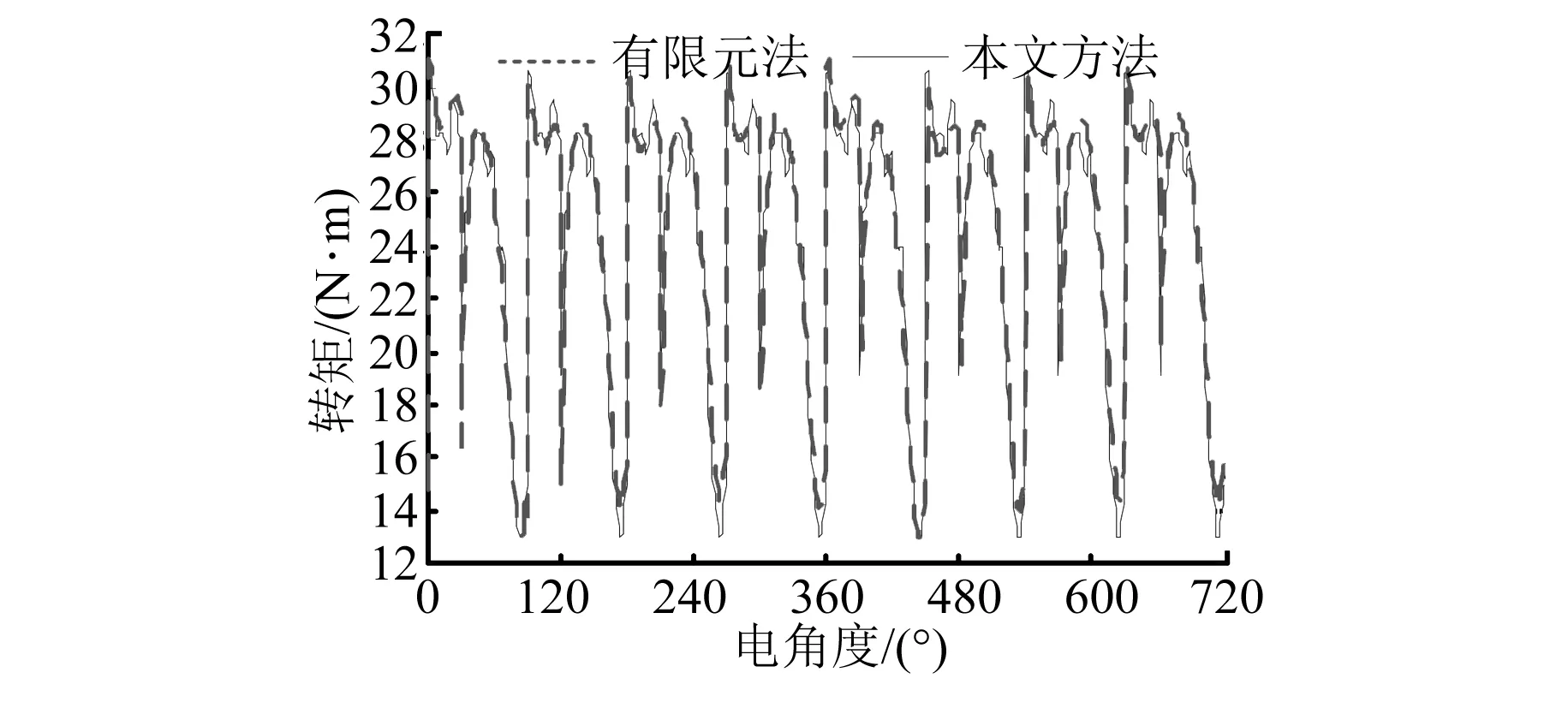
圖16 扣除后電磁轉(zhuǎn)矩波形對比
從圖17可以看出,不同激勵情況下,2種方法得到的轉(zhuǎn)矩平均值誤差較小,平均誤差不超過3.4%,波形吻合度較高,能夠滿足DSEM控制仿真分析的使用場景。
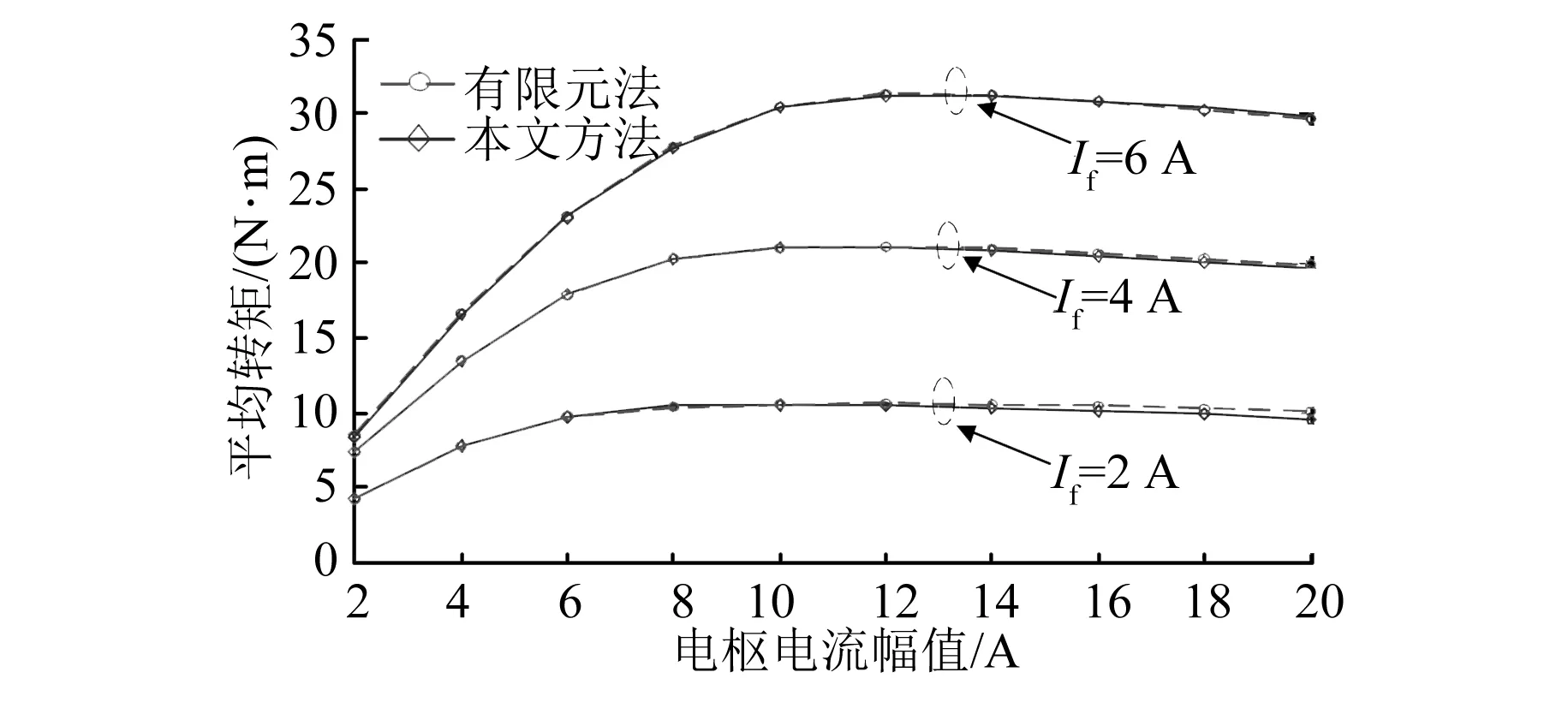
圖17 不同激勵輸出平均轉(zhuǎn)矩對比
3 模型驗證
3.1 模型仿真
為了進(jìn)一步驗證所搭建電機(jī)模型的準(zhǔn)確性,對不同工作狀態(tài)下的仿真結(jié)果進(jìn)行對比。當(dāng)勵磁電流采用滯環(huán)控制時,勵磁電源電壓設(shè)置為120 V,勵磁電流環(huán)寬為0.4 A,在額定轉(zhuǎn)速下,對比有限元法與本文方法所建模型的空載反電動勢仿真波形。
從圖18可以看出,當(dāng)勵磁電流采用滯環(huán)控制時,有限元法與本文方法所建模型的空載反電動勢波形相一致。

圖18 空載反電動勢波形對比(n=240 r/min)
當(dāng)電樞電流采用不對稱電流控制策略時,對比有限元法與本文方法的仿真結(jié)果,如圖19所示。
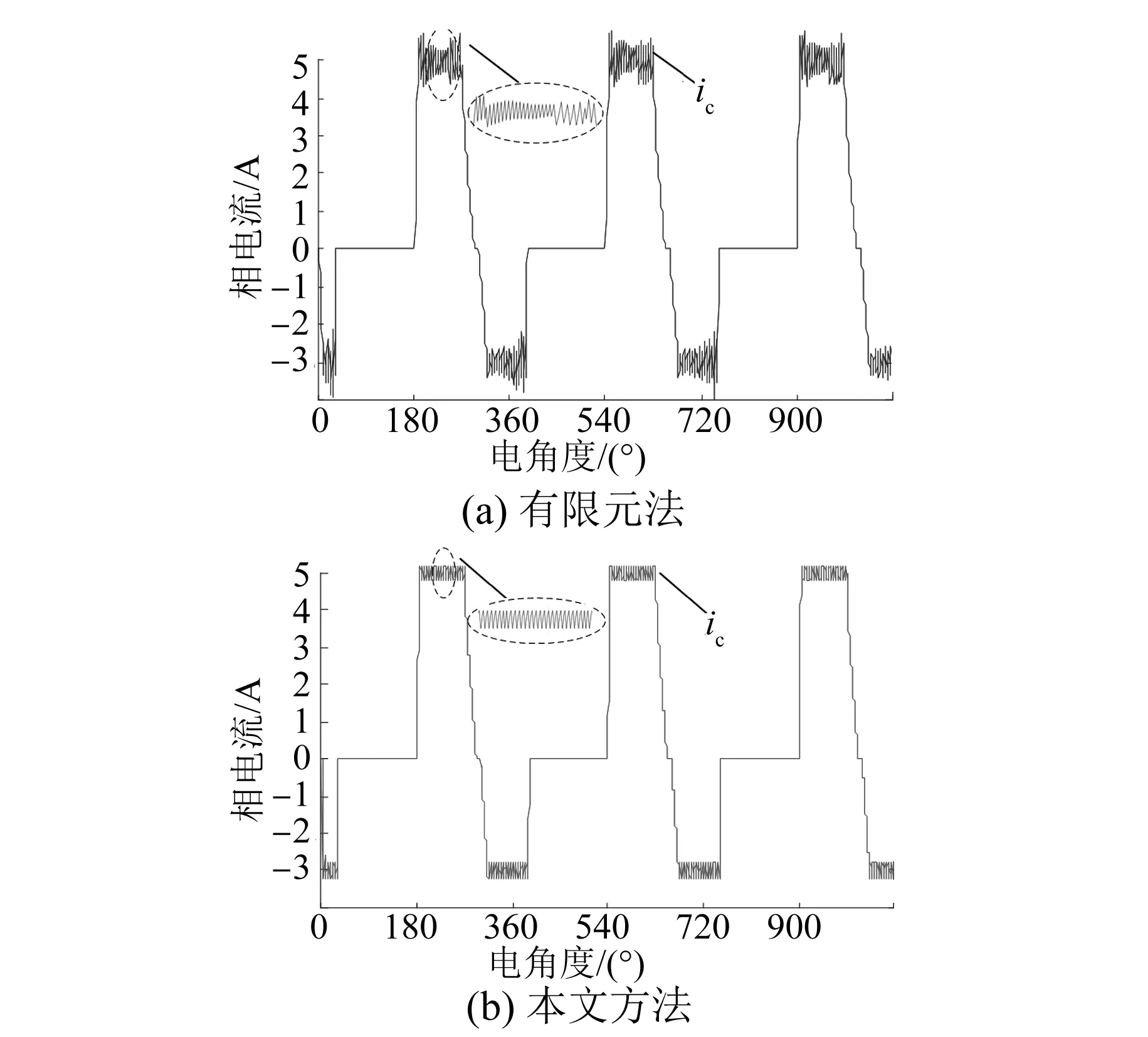
圖19 相電流波形(n=240 r/min)
正向電流幅值為5 A,負(fù)向電流幅值為3 A,電樞電流采用滯環(huán)斬波的方式,環(huán)寬設(shè)置為0.4 A。可以看出,由于電感的存在,電樞電流在上升和下降階段均不能突變,存在一定的斜率。2種方法仿真得到的相電流波形變化規(guī)律一致。
本文仿真所采用計算機(jī)處理器為i7-8700 CPU @3.2 GHz,運(yùn)行內(nèi)存為8G。由表3可以看出,對空載反電動勢進(jìn)行3個電周期的仿真,采用有限元法仿真耗時約134 min 50 s,而采用本文方法所建模型進(jìn)行相同仿真耗時45 s。當(dāng)電機(jī)輸出平均轉(zhuǎn)矩為20 N·m時,有限元法和本文方法耗時分別為171 min 37 s和1 min 19 s。在保證仿真精度的基礎(chǔ)上,使用本文方法進(jìn)行仿真,極大地縮短了耗時,提高了仿真效率。
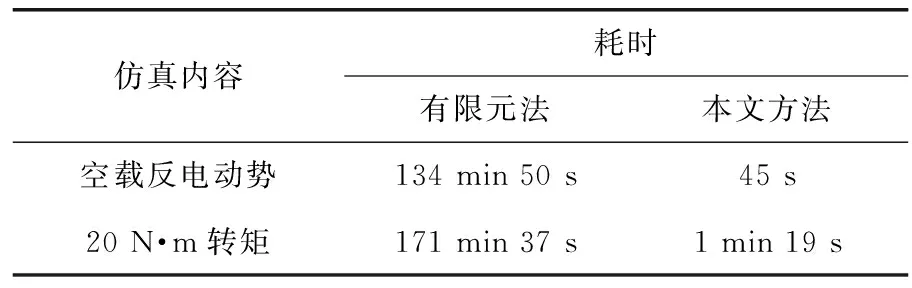
表3 仿真耗時對比(3個電周期)
3.2 試驗驗證
為了進(jìn)一步驗證模型與實際電機(jī)的吻合程度,利用試驗平臺對其空載反電動勢及不對稱控制相電流波形進(jìn)行實際測量,試驗平臺如圖20所示。

圖20 試驗平臺
試驗條件為,電機(jī)轉(zhuǎn)速為240 r/min,電樞與勵磁功率變換器母線電壓電壓均設(shè)置為120 V,滯環(huán)環(huán)寬均設(shè)置為0.4 A。電樞電流采用不對稱控制策略,正向電流幅值為5 A,負(fù)向電流幅值為3 A。圖21(a)為空載反電動勢試驗波形,圖21(b)為不對稱相電流試驗波形,可以看出,試驗結(jié)果與仿真結(jié)果一致,再次驗證了所搭建模型與實際電機(jī)模型的高度吻合性。
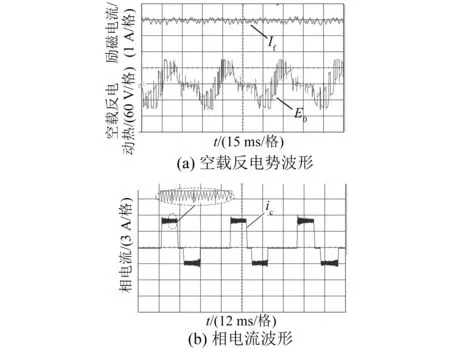
圖21 試驗波形
4 結(jié) 語
本文從機(jī)電能量轉(zhuǎn)換的角度深入分析了DSEM電磁特性。由于DSEM存在明顯的邊緣效應(yīng)和高度的局部飽和現(xiàn)象,其磁鏈和轉(zhuǎn)矩均為電樞電流、勵磁電流、轉(zhuǎn)子位置角的非線性函數(shù),難以采用常規(guī)方法建立精確的模型。現(xiàn)有文獻(xiàn)大多集中于非線性電感和相磁鏈模型的建立。本文在相磁鏈查表研究基礎(chǔ)上,根據(jù)其數(shù)學(xué)關(guān)系得到了勵磁磁鏈。不僅解決了電樞繞組電壓方程的建模問題,同時也解決了勵磁繞組電壓方程和電磁轉(zhuǎn)矩精確建模的兩大問題,也是本文主要的創(chuàng)新之處。本文方法所建模型主要優(yōu)點如下:
(1) 采用查表法同時對相繞組和勵磁繞組磁鏈進(jìn)行建模,仿真精度高,與有限元法相比,最大誤差僅為0.6%,二者空載反電動勢最大誤差為3.2%,波形吻合程度較高。
(2) 采用查表法搭建了單相轉(zhuǎn)矩模型,單相轉(zhuǎn)矩最大誤差為1.2%。在得到單相轉(zhuǎn)矩的基礎(chǔ)上,將各相轉(zhuǎn)矩進(jìn)行疊加,并扣除多余齒槽轉(zhuǎn)矩,得到電磁轉(zhuǎn)矩。電磁轉(zhuǎn)矩平均值最大誤差3.9%,且波形吻合度高。
(3) 耗時短,仿真效率高。分別采用有限元法與本文方法對其空載反電動勢進(jìn)行仿真。耗時分別為134 min 50 s,本文方法所建模型耗時僅為45 s,用時僅為前者的1.2%。當(dāng)輸出轉(zhuǎn)矩為20 N·m時,有限元法與本文方法仿真耗時分別為171 min 37 s和1 min 19 s,用時僅為前者的1.3%。大大提高了仿真效率,便于控制策略的選取與控制參數(shù)的整定。
(4) 本文建模方法原理簡單,適用范圍廣。對于相間互感較小的三相、五相等DSEM以及開關(guān)磁阻電機(jī)的建模具有普適性和實用性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
