基于虛實結合教學法的無人倉智能物流實訓平臺研究
2021-08-12 08:57:54楊洋武志磊李俊韜
物流技術 2021年7期
楊洋,武志磊,李俊韜
(1.中國礦業大學(北京) 管理學院,北京 100083;2.北京物資學院 信息學院,北京 101149)
0 引言
隨著人工智能等現代技術的發展,我國“互聯網+物流”、“機器換人”上升為國家戰略。2017年1月,商務部等五部門聯合發布的《商貿物流發展“十三五”規劃》指出要推廣應用大數據、人工智能、機器人等先進技術,提高供應鏈精益化管理水平。國家發改委在《“互聯網+”高效物流實施意見》的通知中指出要提升倉儲配送智能化水平,鼓勵物流機器人技術開發,促進機器人在物流領域應用,開展倉內機器人多模式應用[1]。面對大量貨品的流動,無人倉解決進貨、存儲、揀貨、包裝、分揀等環節;無人倉的“智能化”進行有條不紊的調配和操作,讓倉儲的運營效率不斷逼近最優值。無人倉在智能物流運營效率、靈活性、吞吐量等方面跨上了一個新的臺階,將成為未來物流倉儲發展的趨勢。而由于無人倉系統組成要素的復雜性,合理地規劃與運營顯得尤為重要。
物流業是現代國民經濟的“血脈”和新興增長點,產業變革急需實踐能力強、創新能力強、具備國際競爭力的高素質復合型人才[2]。大學生作為受教育程度較高的社會人群,將成為促進產業持續高速發展的主力軍,這對供應鏈管理人才的培養提出新的需求與挑戰。2017年3月,教育部發布《教育部辦公廳關于2017-2020年開展示范性虛擬仿真實驗教學項目建設的通知》,并從建設目標、建設內容、建設規劃、建設方式和組織管理等方面作了具體要求[3]。2018年1月,教育部發布《關于印發教育部高等教育司2018年工作要點的通知》,要求全面推動互聯網、大數據、虛擬現實、人工智能等現代信息技術與課堂教學深度融合,創新教育形態、豐富教學資源、重塑教學流程,以教育技術現代化助推高等教育現代化[4]。
在人工智能、大數據技術的快速發展下,以及虛擬仿真技術的日趨成熟中,高等教育中特別是物流專業,已慢慢孕育出了新的教學模式。通過大數據與人工智能技術強化師資力量,通過3D技術構建的虛擬仿真實訓課程,能夠很好的解決目前物流教學與產業對接不足、課程滯后、實踐和創新性不足等問題[5]。因此開設相應的智慧物流資源課程,建設符合物流行業發展趨勢、與企業物流先進技術接軌的智慧物流和虛擬仿真實驗室,培養創新性強、專業技術硬的應用型物流人才,是高校專業實驗教學的有益補充和創新,既符合院校物流及相關學科專業建設發展的需要,也是為智能物流產業發展培養高質量人才的大勢所趨。
本文從目前物流倉儲領域應用速度較快的AGV系統出發,提出和設計了基于AGV的無人倉實操平臺和無人倉運營規劃仿真平臺,為基于視覺識別技術的AGV無人倉物流教學和科研進行了探索和實踐。
1 無人倉智能物流虛擬仿真教學平臺構建
無人倉智能物流虛擬仿真實訓教學平臺由AGV貨到人揀選實訓平臺和無人倉虛擬仿真平臺組成,能夠完成基于AGV的無人倉設備認知、運營實操、規劃仿真和數據分析實訓,如圖1所示。
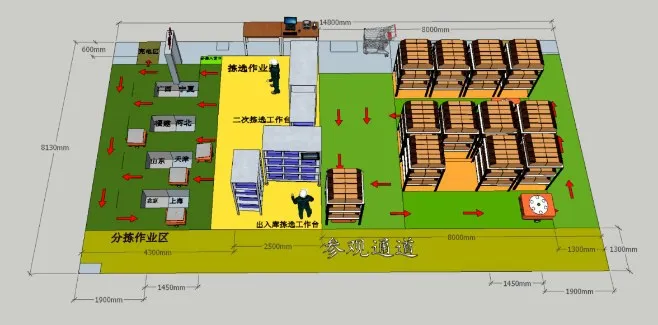
圖1 AGV無人倉系統布局
1.1 AGV貨到人揀選實訓平臺
AGV貨到人揀選系統主要包括業務交互系統(無人倉管理系統)、智能調度系統、自動充電系統、AGV小車、工作站(上架/揀選/盤點)、移動貨架等輔助設備。學生可通過該實訓系統學習并完成“貨到人”模式倉儲系統的整個作業流程。首先,可通過業務交互系統完成下單、揀選出庫等下達指令操作,再通過智能機器人在調度系統的指引下完成最優方案的揀選動作,最后完成指定任務。此外,物流機器人揀選能夠真實模擬各實訓場景中的倉儲管理的作業流程,可以很好地反映現實場景系統的效率,并且能夠模擬現實還沒有實現的更大規模場景,學生可進行不同場景的組合優化進行研究,AGV無人倉作業流程如圖2所示。
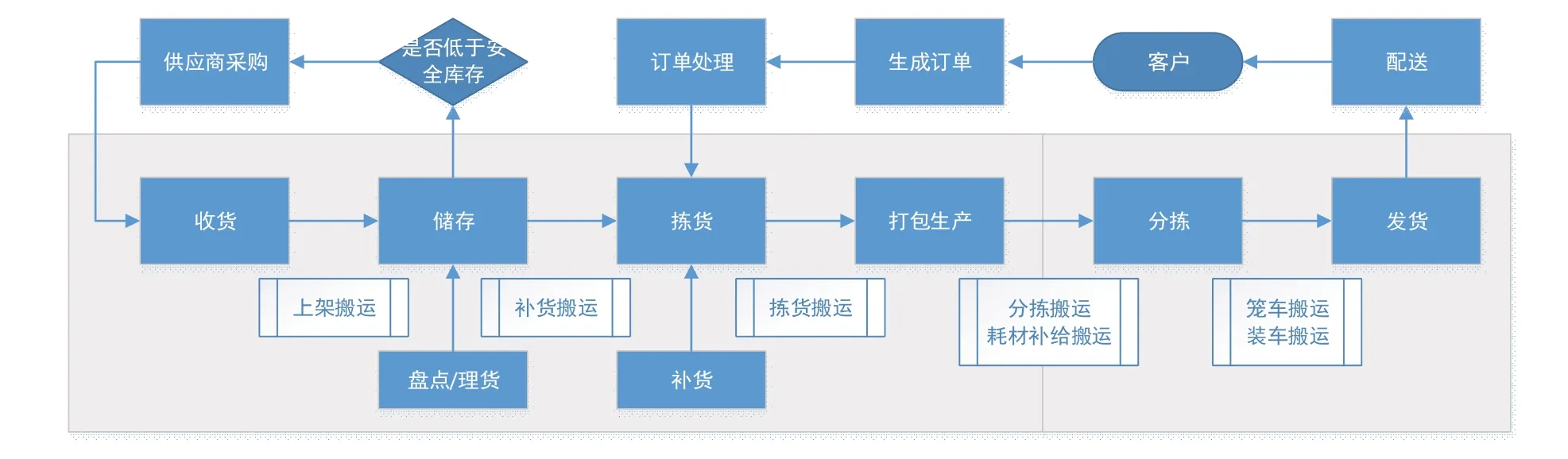
圖2 AGV無人倉作業流程
當揀選任務發布后就可以啟動調度系統對AGV進行調度,通過調度系統的任務劃分及算法模型進行最優匹配并按照耗能成本最小進行作業任務,其運作模式如下流程:
首先,當有訂單下達,需要進行揀貨作業時,無人倉管理系統對客戶訂單進行分析,獲取客戶下單的物品品類、型號以及數量,然后考慮倉庫庫存水平,對所有需要揀選貨物的所在貨架進行定位并確定各目標貨架綜合最短距離對應的揀選工作站,并分配訂單給不同的揀選工作站。
其次,系統會根據任務貨架的情況以及當前系統中所有AGV的情況,選擇適當的AGV去執行任務貨架:AGV從當前位置前往貨架位置,將貨架頂起并送至相應的揀選工作站,由揀選工作站的操作人員完成貨物的揀選工作;當單元搬運貨架完成揀選任務后,系統進行實時計算根據當前倉庫狀態給當前貨架分配回歸位置,調度系統收到指令調度AGV至相應貨位。此貨位不一定是該貨架原始貨位,而是根據目前業務和倉庫存儲狀況,通過系統大數據算法優化后重新分配的庫位。
最后,AGV被釋放,繼續接受新的任務貨架。
(1)無人倉管理系統。基于機器人的無人倉管理系統與無人倉作業業務流程相匹配,實現倉庫管理、入庫單管理、入庫上架、在庫管理、出庫單管理、貨到人揀選、二次揀選、任務管理、分揀等功能。同時,系統利用大數據分析技術對商品進行關聯性分析、聚類分析等方法對貨物進行分散存儲、ABC分類等提高AGV作業效率,對AGV的運營狀態監控和軌跡數據進行全局/局部熱度分布和展示分析。
(2)無人倉調度系統。無人倉調度系統通過路徑規劃、全場定位導航、行走路徑控制等完成對智能機器人的任務調度、狀態管理。通過固定的協議與物流揀選AGV和揀選工作站通信,完成貨物上架以及貨物揀選作業。主要包括基礎設置、地圖設置、任務調度、AGV管理、在線設備、監控預警等功能。大規模AGV作業時,AGV之間的路徑規劃、智能調度對倉庫作業效率至關重要,本系統中運用關聯度分析、聚類算法、啟發式算法、大數據深度學習等方法實現對AGV的調度,大大提高了揀選分揀的作業效率,如圖3所示。
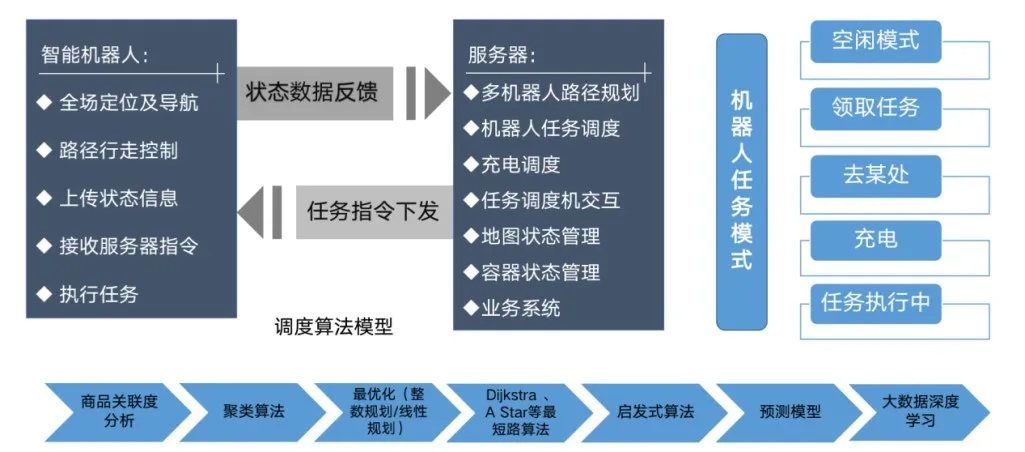
圖3 無人倉調度系統功能
(3)AGV小車。Automated Guided Vehicle,簡稱AGV,是一種自動導航移動機器人,是集環境感知、動態決策與規劃、行為控制與執行等多功能于一體的可移動的物流搬運裝備[8]。物流機器人的核心技術是自主導航技術,它是以地面部署的二維條碼作為參考坐標點,并與慣性導航模塊信息融合進行組合定位導航,通過WiFi與總控系統通訊,動態規劃行走路徑。該物流機器人集成了激光、視覺識別、慣性導航、WiFi等多種先進技術的高度智能化的智能物流裝備,如圖4所示。

圖4 揀選AGV小車結構
(4)上架/揀選/盤點工作站。工作站主要完成貨物的上架、揀選、盤點,工作人員在各類信息傳遞設備的幫助下,將目標貨物從存儲貨架上揀選至訂單貨架的料箱中,由工作站系統、識別設備、電子標簽輔助揀選設備、貨架和周轉箱等組成,如圖5所示。

圖5 工作站實景
(5)自動充電系統。充電站和機器人的運行統一接受服務器的統一調度,實現在線自動充電。機器人上報電池實時狀態給服務器,根據預設的充電邏輯,服務器調度機器人到充電站進行充電。機器人運行至充電站,完成充電接口自動對接并將檢測對接正常狀態上報給服務器,服務器收到機器人對接完畢狀態后,給充電站發送啟動充電指令,開始對機器人充電。充電過程中,機器人將電池狀態上報服務器,當機器人檢測到電池充好后,將充電完成狀態上報給服務器,服務器給充電站發送停止充電指令。
1.2 無人倉規劃運營仿真平臺
為滿足大規模教學與電商物流的實際業務需求,利用仿真平臺對電商物流系統進行仿真,支持大規模的教學活動,同時能夠對畢設、科研等提供支撐。無人倉仿真平臺針對智能倉儲流程進行了深度的強化和專業知識的分解,再現智能倉儲作業的真實業務場景及動作,無人倉仿真平臺核心組成包括無人倉運營仿真系統、無人倉規劃仿真系統和柔性生產物流系統。
(1)無人倉3D仿真系統。利用Unity3d技術構建無人倉3D認知學習平臺,實現AGV的基本結構、工作原理、工作過程、設備拆裝、設備維護、故障排除等認知功能,如圖6所示。

圖6 無人倉3D仿真系統界面
(2)無人倉運營仿真系統。無人倉運營仿真系統模擬揀選、分揀等倉儲作業核心流程,呈現智能倉儲系統作業環節的各主要功能及場景,包括揀選工作站、分揀工作站、充電區、停車區、通道、格口、貨架等場景。呈現倉儲系統各作業環節的真實模擬,包括搬運操作、揀選操作、分揀操作。該系統可靈活設置系統參數進行多樣化倉儲布局。學生可在相同的要求下進行不同布局的實驗并記錄,加深對智能物流系統的理解。同時運營仿真系統在無機器人的情況下,替代機器人與智能調度系統,與無人倉倉儲管理系統交互,解決學生較多、設備不足情況下教學實訓問題,如圖7所示。

圖7 無人倉運營仿真系統界面
(3)無人倉規劃仿真系統。無人倉規劃仿真系統在學生了解無人倉運營流程的基礎上進一步針對AGV的倉儲進行規劃設計的進階學習。在無人倉的應用過程中,如何解決大規模調度一直是行業內的難題,同時大規模的無人倉系統涉及到布局、規劃、資源配置、任務分配多個難題,通過仿真系統,能夠更加直觀的將問題呈現,并且通過仿真得到有效的解決方案。主要包括用戶管理、儲位分配、揀選規劃仿真、分揀規劃仿真,如圖8所示。
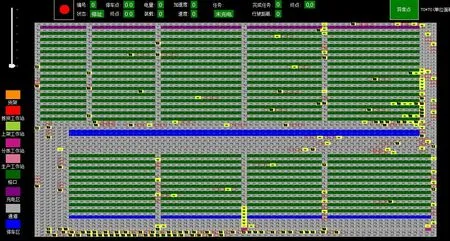
圖8 無人倉規劃仿真系統界面
(4)柔性生產物流系統仿真。系統包括生產機器人、路線、生產工作站、分揀工作站,充電區、停車區等規劃仿真,實現柔性生產業務仿真,并能對運行結果進行分析。包括用戶管理、車間管理、路網規劃、柔性生產線布置、車間數據管理、車間計劃管理、加工管理、生產業務交互系統等主要功能。讓學生了解基于AGV的柔性生產車間規劃運營理念,如圖9所示。

圖9 柔性生產物流系統仿真界面
2 無人倉智能物流虛擬仿真實訓教學組織與實施
2.1 虛實結合教學法
利用虛擬仿真技術將無人倉作業流程在虛擬軟件中結合起來,實現無人倉AGV、充電樁、工作站等關鍵設備和上架、揀選、分揀等流程的3d展示,讓學生直觀認知。通過無人倉運營規劃仿真系統實現無人倉運營仿真,模擬作業全流程,學生可以通過軟件實現新型無人倉的流程分析及動線布置等規劃設計并進行驗證。物流大數據分析平臺則可將無人倉或整個物流環節的訂單、客戶、倉儲、設備、軌跡等多個維度信息進行數據挖掘和利用分析,從而進行商業價值挖掘和管理提升,最后學生能夠通過真實的無人倉平臺進行無人倉搭建、數字化運營的實操,切實掌握整個無人倉相關知識。無人倉實訓平臺實驗設計見表1。
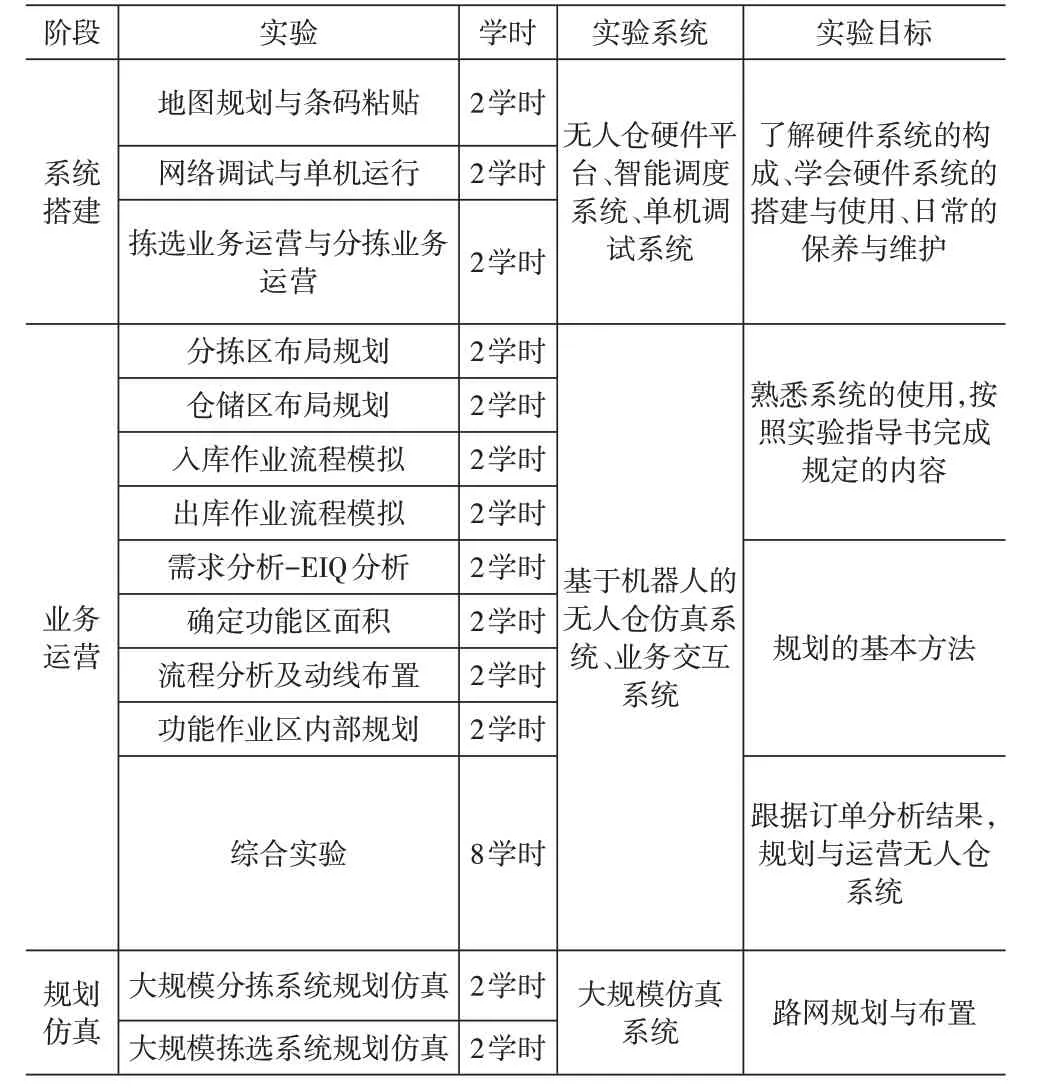
表1 無人倉實訓平臺實驗設計
實訓設計過程中將先進物流裝備、大數據、物聯網等技術融入到物流教學中,讓學生感知科學技術對物流發展的影響,同時通過3D和仿真等虛擬結合,教學過程直觀生動、教學內容全面,便于學生對無人倉作業模式的感性和理性認識,顯著提高教學效果。
2.2 模塊化教學法
無人倉智能物流虛擬仿真實訓教學平臺實現了從訂單下達、揀選、分揀、配送整個物流流程,同時每部分流程或設備都有詳細的資源配置可進行單獨教學。如針對物流管理專業,可以從無人倉業務流程、倉儲管理、倉庫規劃、物流大數據分析等環節重點教學,針對物流工程專業可從物流裝備的認知和運維、物流裝備作業原理及配置、大數據挖掘模型編程設計等方面入手,實現因材施教、靈活多用。
3 結語
AGV智能無人倉實訓平臺的建設實現了目前電商物流倉儲中應用日益廣泛的AGV貨到人揀選作業模式,滿足學生實訓的同時,起到了很好的示范作用。無人倉運營規劃仿真系統對區別于傳統倉庫布局的新型貨到人無人倉作業運營規劃提供了仿真平臺,具有創新性和先進性。通過虛擬仿真平臺的建設很好的解決了資金、場地條件有限的情況下,大規模學生上課組織的問題,讓課堂脫離硬件也能進行。
平臺將最新行業發展趨勢和技術融入到教學過程中,通過課程資源和平臺的開發,人才培養方案的優化,提供AGV貨到人無人倉相關的實驗室軟件、教學系統、課件等教學資源,豐富了教學內容,提升了教育理念、教學能力,促進了專業化發展。平臺在滿足教學實訓的同時,也可以基于實驗室環境開展專業實訓、課程設計、畢業設計、學科競賽等活動,為多學科共享開放實驗室提供了支撐和保障。平臺的建設將繼續促進教學資源形成科研成果,探索人才培養的新模式,進一步向著建成能夠滿足行業發展需要、可共享的課程、教材資源并能推廣應用的方向努力。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
物流技術與應用(2019年8期)2019-09-04 03:29:56
汽車觀察(2018年12期)2018-12-26 01:05:44
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28
現代企業(2015年2期)2015-02-28 18:45:09
商界(2014年12期)2014-04-29 00:44:03