基于探鳥雷達的機場周邊鳥類目標數(shù)量估計
2021-09-11 09:09:46陳唯實黃毅峰盧賢鋒張潔陳小龍
北京航空航天大學學報 2021年8期
關(guān)鍵詞:關(guān)聯(lián)
陳唯實 黃毅峰 盧賢鋒 張潔 陳小龍
(1. 中國民航科學技術(shù)研究院, 北京 100028; 2. 海軍航空大學, 煙臺 264001)
鳥擊航空器是民航的傳統(tǒng)安全隱患[1]。 全球每年約發(fā)生21 000 起鳥擊事件,造成經(jīng)濟損失約12 億美元[2]。 2009 年1 月15 日發(fā)生的全美航空公司1549 號航班哈德遜河緊急迫降事件,是迄今為止最為典型的一起鳥擊事故[3]。 隨著航班量的持續(xù)增長和生態(tài)環(huán)境的不斷改善,中國機場的鳥擊防范工作壓力持續(xù)增大。 2019 年,全國運輸機場共發(fā)生責任區(qū)鳥擊事件836 起,同比增加113 起,增幅15.6%,責任區(qū)鳥擊事件萬架次率為0.72,增幅10%。
《運輸機場運行安全管理規(guī)定》[4]要求機場管理機構(gòu)應(yīng)持續(xù)開展鳥害防范基礎(chǔ)性調(diào)研,全面掌握機場內(nèi)及其附近地區(qū)的生態(tài)環(huán)境、鳥類種群、數(shù)量、位置分布及活動規(guī)律;繪制鳥類活動平面圖;掌握機場內(nèi)及其附近地區(qū)與鳥情動態(tài)密切相關(guān)的生物類群及影響因素的時間、空間分布情況,分析其中的關(guān)系;據(jù)此制定和不斷完善鳥害防范實施方案,確定各階段應(yīng)當重點防范的對象,有針對性地實施鳥害防范措施。
近年來,探鳥雷達技術(shù)取得了長足進步,其作為鳥情觀測的重要技術(shù)手段,能夠全天候自動運行并持續(xù)積累飛鳥目標雷達數(shù)據(jù)[5]。 通過對探鳥雷達數(shù)據(jù)的處理分析,有助于掌握機場周邊鳥類活動規(guī)律,及時形成鳥情分析報告,指導機場制定科學合理的鳥防措施[6]。 相比之下,傳統(tǒng)的機場鳥情生態(tài)環(huán)境主要依靠人工并借助望遠鏡和夜視儀完成,調(diào)研方法主要包括樣帶法、樣點法和計數(shù)鳥群法,且要求調(diào)研人員具備鳥類學專業(yè)知識[7]。 因此,機場通常會聘請專業(yè)的鳥情生態(tài)環(huán)境調(diào)研機構(gòu)開展相關(guān)工作,周期一般為5 年一次。可見,傳統(tǒng)的鳥情生態(tài)環(huán)境調(diào)研方法雖然能夠識別鳥種,但效率較低、實時性不強,機場管理機構(gòu)難以及時掌握機場周邊最新的鳥情態(tài)勢,從而制定可實時調(diào)整的有針對性的應(yīng)對策略。 利用先進的探鳥雷達技術(shù),結(jié)合人工鳥情調(diào)研方法,成為機場鳥情觀測的發(fā)展趨勢。
針對以上需求,本文提出了一種基于探鳥雷達數(shù)據(jù)的機場周邊鳥類目標數(shù)量估計方法,采用多目標航跡自動起始跟蹤算法對探鳥雷達獲取的飛鳥目標信息進行處理分析,實時估計熱點區(qū)域內(nèi)的鳥類目標數(shù)量,幫助機場管理機構(gòu)及時掌握機場周邊的鳥類數(shù)量變化情況及分布態(tài)勢。
1 探鳥雷達
目前,國內(nèi)外已經(jīng)研制出了相對成熟的機場探鳥雷達系統(tǒng)。 其中,國外最具代表性的產(chǎn)品包括美國的Merlin 雷達、加拿大的Accipiter 雷達、荷蘭的Robin 雷達及英國的Aveillant 雷達,國內(nèi)的部分高校和科研院所也開展了探鳥雷達技術(shù)研究,探鳥效果逐步提升[8]。
圖1 為典型的雙天線機場探鳥雷達系統(tǒng)(https://detect-inc. com/)。 其通常配有2 部不同波段的雷達,一部為X 波段垂直掃描雷達,另一部為S 波段水平掃描雷達,均采用T 型波導陣列天線,大部分早期成熟的探鳥雷達均采用這種體制,如Merlin、Accipiter 和Robin。 水平掃描雷達能覆蓋機場周邊的廣大地區(qū),并獲取水平平面的二維信息,但不能提供高度信息;垂直掃描雷達可以獲得垂直平面的高度信息。 由于水平和垂直掃描的2 部雷達覆蓋的范圍不同,波束重疊區(qū)域很小,系統(tǒng)獲得的三維信息不是真正的三維。 探鳥雷達系統(tǒng)通常被放置在機場跑道的附近或一端,對包括航班起降通道在內(nèi)的機場區(qū)域進行監(jiān)控。 垂直掃描雷達與跑道連成一線,使其掃描范圍恰好覆蓋航班的起降通道,同時提供該區(qū)域的鳥類目標高度信息;水平掃描雷達對機場周邊區(qū)域進行掃描,對進入該區(qū)域的鳥類目標進行預(yù)警。 對于小型鳥類,該系統(tǒng)的探測范圍可以達到垂直高度2 300 m,水平距離2 ~3 n mile(1 n mile =1.852 km);對于中大型鳥類或鳥群,探測范圍可以達到垂直高度15 000 ft(1 ft =0.304 8 m),水平距離為4 ~6 n mile。近年來,以Aveillant 雷達系統(tǒng)為代表的相控陣、全息雷達等先進的雷達技術(shù)逐步應(yīng)用于機場探鳥,進一步提高了鳥情數(shù)據(jù)的可靠性,引領(lǐng)了探鳥雷達技術(shù)的發(fā)展方向。

圖1 典型的雙天線機場探鳥雷達系統(tǒng)Fig.1 Typical airport avian radar system with dual antennas
2 多目標航跡自動起始跟蹤
雷達獲得的量測數(shù)據(jù)包括目標信息及部分雜波干擾,跟蹤目的在于從雜波中提取出每個目標形成的航跡。 目標跟蹤要先解決目標狀態(tài)的初始化關(guān)聯(lián),即航跡起始問題[9]。 現(xiàn)有的航跡起始跟蹤算法主要包括順序處理和批處理兩大類[10]。順序處理算法通常基于一定的邏輯規(guī)則,主要包括直觀法[11]和邏輯法[12],此類算法計算量較小,但在雜波環(huán)境中性能下降明顯。 批處理算法主要包括Hough 變換法及其衍生的改進算法[13-14],此類算法發(fā)源于圖像處理,可以起始直線運動的目標且適用于雜波環(huán)境,但由于計算量較大導致航跡起始的實時性欠佳。 近年來,支持向量機[15]、隨機森林[16]、神經(jīng)網(wǎng)絡(luò)[17]等智能算法也被用于航跡起始,但此類算法通常只適用于特定的訓練數(shù)據(jù),普遍存在可移植性差和時效性不佳的問題。
針對以上問題,本文結(jié)合機場鳥類活動規(guī)律,基于探鳥雷達獲取的鳥情數(shù)據(jù),以鳥類目標活動熱點為參照點,建立飛鳥目標航跡起始與消亡的概率分布模型,縮短了航跡起始時間,降低了航跡虛警率。 本節(jié)首先介紹多目標航跡自動起始跟蹤的算法流程,進而討論多目標數(shù)據(jù)關(guān)聯(lián)算法、目標生命周期中各類可能事件的關(guān)聯(lián)概率估計及卡爾曼濾波與平滑方法。
2.1 算法流程
多目標航跡自動起始跟蹤算法的關(guān)鍵和難點在于目標狀態(tài)的初始化。 基于當前時刻的狀態(tài)預(yù)估值,由粒子濾波的數(shù)據(jù)關(guān)聯(lián)算法對當前時刻的量測值與可能事件一一關(guān)聯(lián),包括目標的新生、延續(xù)和消亡,同時排除雜波影響。 在量測值與所有已知目標的預(yù)估狀態(tài)和新生目標的初始狀態(tài)關(guān)聯(lián)之后,進行卡爾曼狀態(tài)更新,獲得當前存在的所有目標的狀態(tài)更新值。 對全部卡爾曼濾波結(jié)果進行平滑處理,得到每個存在過的目標的平滑航跡。算法流程如圖2 所示。
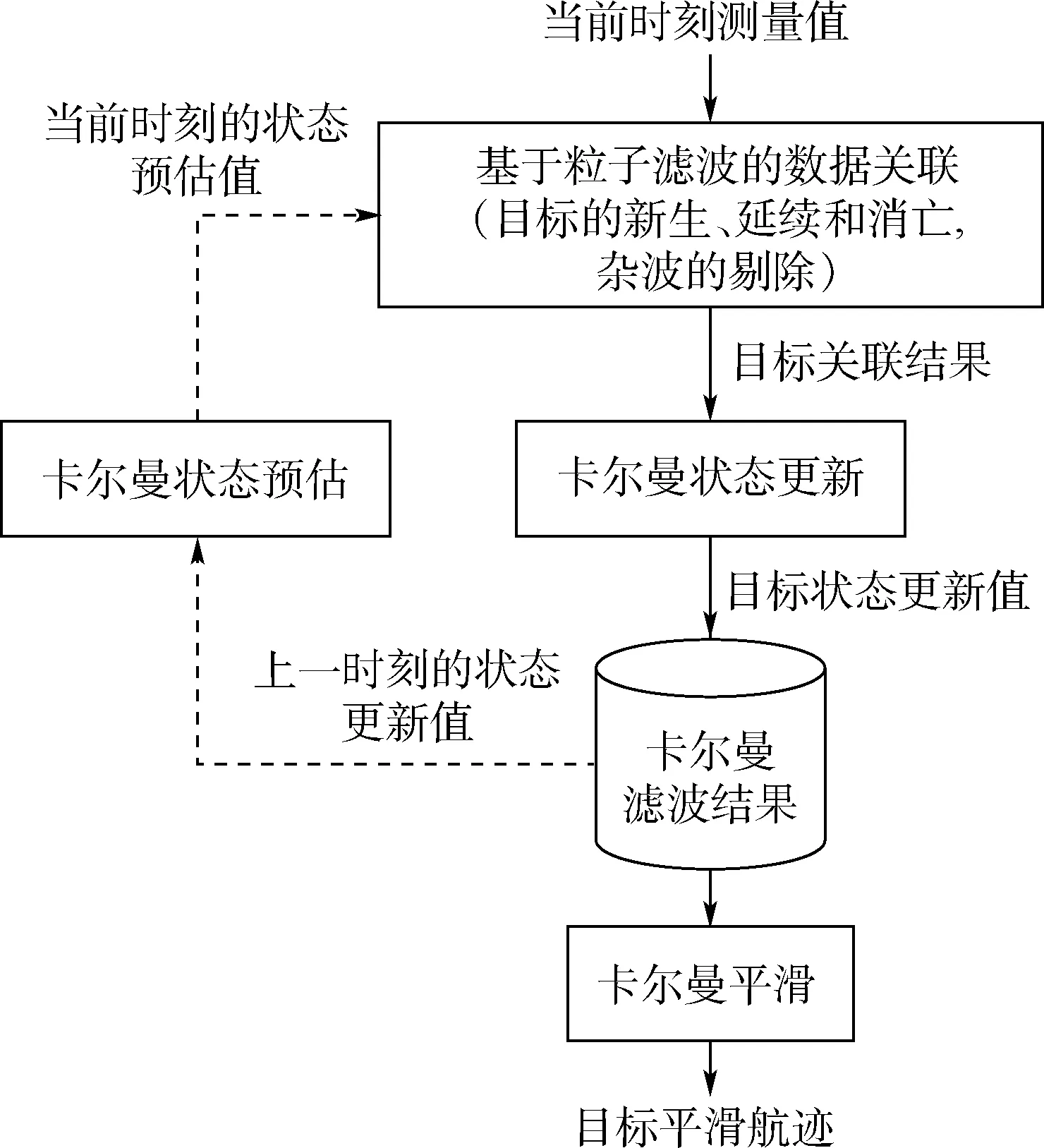
圖2 多目標航跡自動起始跟蹤算法流程Fig.2 Flowchart of multi-target automatic initiation and tracking algorithm
每個目標都有其生命周期,即從新生到消亡的過程,因此目標存在的數(shù)目始終處于變化之中。通過數(shù)據(jù)關(guān)聯(lián)算法,判斷量測屬于已存在的目標、新生目標、抑或雜波,從而將復雜的雷達多目標跟蹤問題簡化為普通的單目標跟蹤問題,同時記錄每個目標的生命周期,對當前存在的目標總數(shù)進行實時統(tǒng)計。
2.2 數(shù)據(jù)關(guān)聯(lián)算法
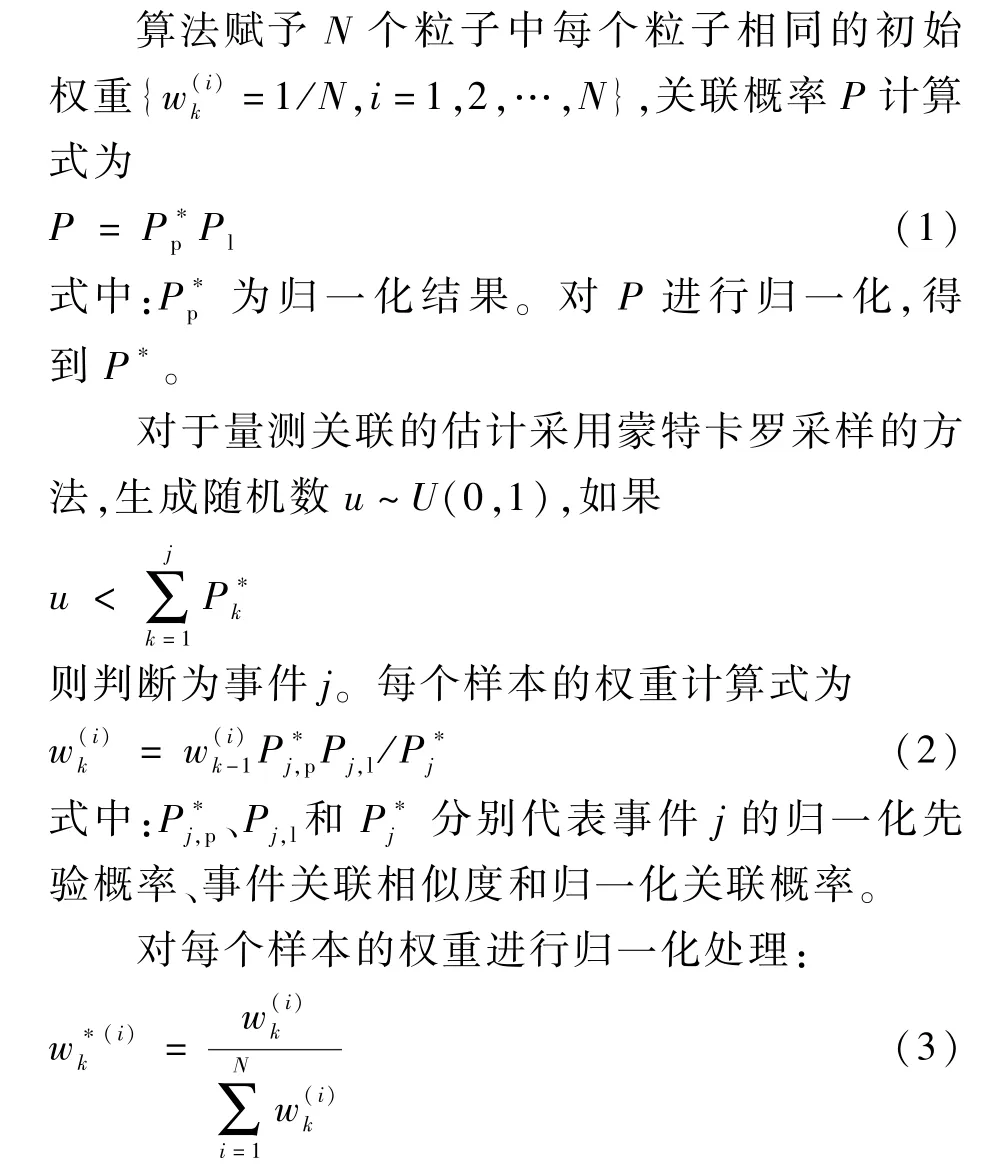
基于粒子濾波算法進行的多目標數(shù)據(jù)關(guān)聯(lián),可視為多假設(shè)跟蹤(Multiple Hypothesis Tracking,MHT)算法的推廣。 每個粒子代表不同的數(shù)據(jù)關(guān)聯(lián)假設(shè),降低了MHT 算法的復雜性。 在每個粒子中,將量測與若干可能事件相關(guān)聯(lián),計算每個事件的先驗概率Pp和事件關(guān)聯(lián)相似度Pl,進而給出每個事件的關(guān)聯(lián)概率P,2.3 節(jié)將列出所有可能事件的關(guān)聯(lián)概率模型。
估計有效樣本數(shù)目ne,且

如果ne過小,則進行重采樣。
2.3 可能事件關(guān)聯(lián)概率估計
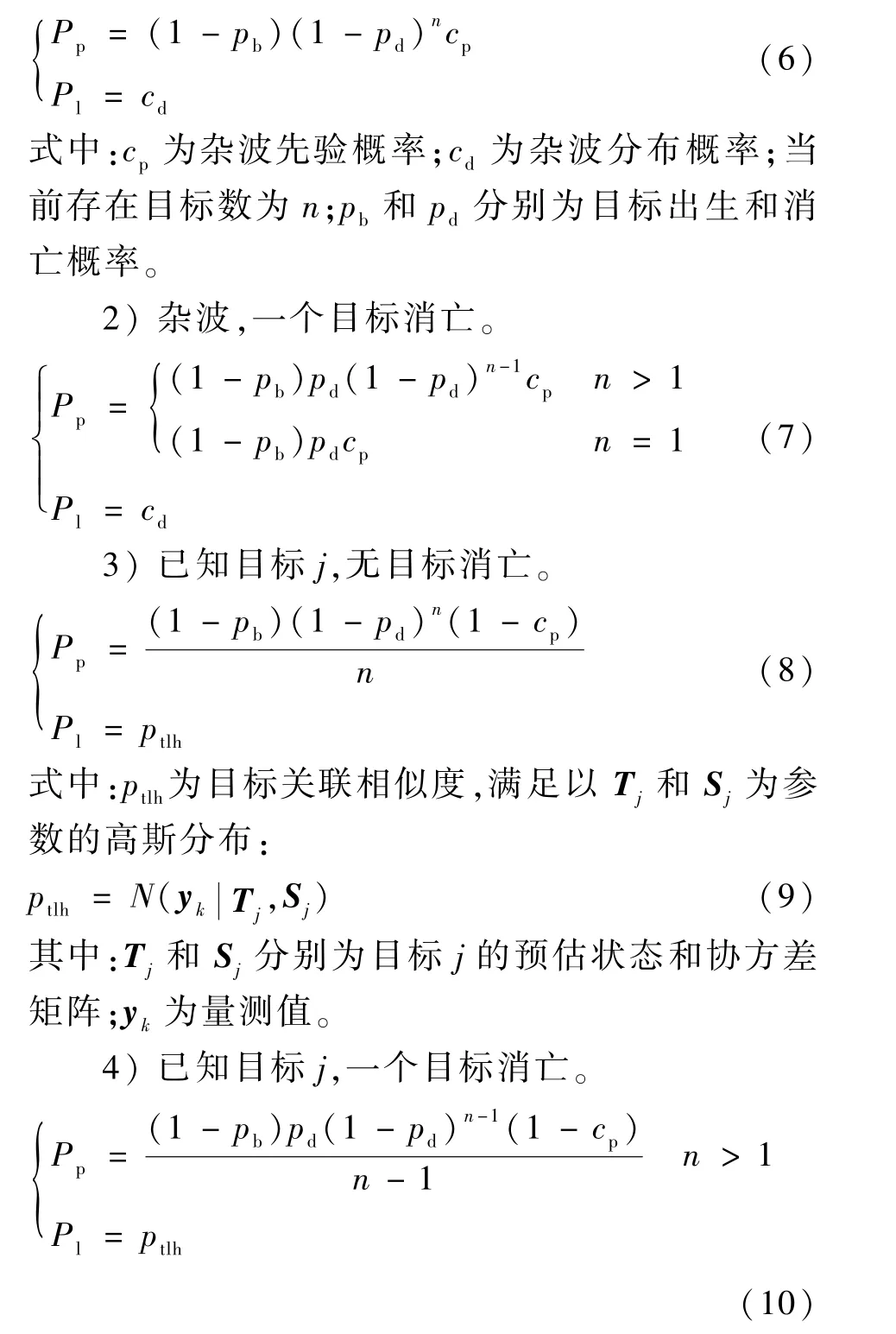
在沒有任何先驗知識的情況下,量測的關(guān)聯(lián)結(jié)果需要基于對雜波、新生目標、已知目標、目標消亡等所有可能事件出現(xiàn)概率的計算。
設(shè)pb為航跡起始即新生目標概率,新目標的出現(xiàn)意味著當前量測作為新目標的起始狀態(tài)。 本文中,將飛鳥目標活動熱點作為目標航跡起始的參考點,通過量測與熱點的關(guān)聯(lián)度起始航跡,降低了跟蹤算法的復雜性,并提高了其效率與工程適用性。 另外,設(shè)pd為目標消亡概率,以gamma 分布建模:

式中:θ為目標航跡與量測關(guān)聯(lián)的中斷時間,中斷時間越長,目標消亡的概率越大;函數(shù)的坡度隨α和β的不同取值而變化。
因此,建立所有可能的量測關(guān)聯(lián)事件概率模型,并歸納如下:
1) 雜波,無目標消亡。
5) 新目標航跡起始,無目標消亡。
基于以上6 類可能事件的關(guān)聯(lián)概率估計結(jié)果,實現(xiàn)對每個目標從新生、延續(xù)直至消亡的全生命周期管理。
2.4 卡爾曼濾波與平滑
卡爾曼濾波的實質(zhì)在于:根據(jù)目標的當前狀態(tài)估計其未來的狀態(tài),并通過量測值對其進行修正。 卡爾曼濾波分為2 步:①預(yù)估。 根據(jù)前一步的量測值預(yù)估出系統(tǒng)下一步的狀態(tài)。 ②更新。 根據(jù)當前時刻的量測值估計出系統(tǒng)的當前狀態(tài)。 其中,預(yù)估部分由方程(13)完成:

式中:mk和Pk分別為k時刻獲得量測之后估計的狀態(tài)均值和方差;v為量測修正;K為濾波增益,其定義了預(yù)估值修正的程度。
卡爾曼平滑與卡爾曼濾波的流程類似,區(qū)別在于濾波的遞推是前向的,而平滑的遞推是后向的。 經(jīng)過卡爾曼平滑的處理,可以獲得比僅進行卡爾曼濾波更高的精度。
3 仿真數(shù)據(jù)分析
本節(jié)針對不同雜波環(huán)境中的目標跟蹤仿真數(shù)據(jù),通過蒙特卡羅實驗,評價本文算法特別是多目標航跡自動起始跟蹤算法的有效性,重點在于不同參數(shù)設(shè)置情況下目標航跡起始的及時性及目標數(shù)目的變化情況。
3.1 目標航跡起始仿真
運動目標狀態(tài)表示為

式中:(xk,yk)為二維直角坐標系中目標在k時刻的位置;(?xk,?yk)為速度。
目標的離散動態(tài)模型可以表示為線性、時不變構(gòu)造方程:

其中:時間步長設(shè)定為Δt=0.01,過程噪聲的功率譜密度設(shè)定為q=0.001。
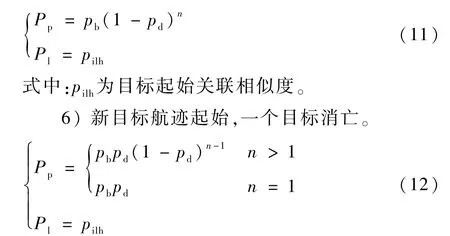
圖3 為雜波環(huán)境中目標的仿真航跡,仿真步數(shù)為50 步。 量測中屬于目標的部分附加了一定的高斯噪聲,雜波均勻地分布在[ -5,5] ×[ -1,9]的區(qū)域內(nèi),其在每個掃瞄周期中出現(xiàn)的數(shù)量滿足均值為λ的泊松分布。 以(0,0)為目標起始的參考點,目標航跡的起始點與參考點的距離為d,目標起始速度的絕對值為1,起始方向在0° ~360°范圍內(nèi)隨機分布。 圖3 為某次仿真實驗的目標航跡示意圖,圖3(a)為全局示意圖,圖3(b)為局部放大圖,該實驗中d=0.2,λ=0.5,且粒子數(shù)N=50。
圖4 為另一次仿真實驗的目標航跡示意圖,圖4(a)為全局示意圖,圖4(b)為局部放大圖,該實驗中d= 3,λ= 1,且粒子數(shù)N= 50。 對比圖3和圖4 的2 次目標跟蹤結(jié)果可知,圖3 中的目標航跡起點距參考點很近(d=0. 2),航跡起始沒有延時;圖4 中的目標航跡起點距參考點相對較遠(d=3),航跡起始出現(xiàn)了1 個周期的延遲。
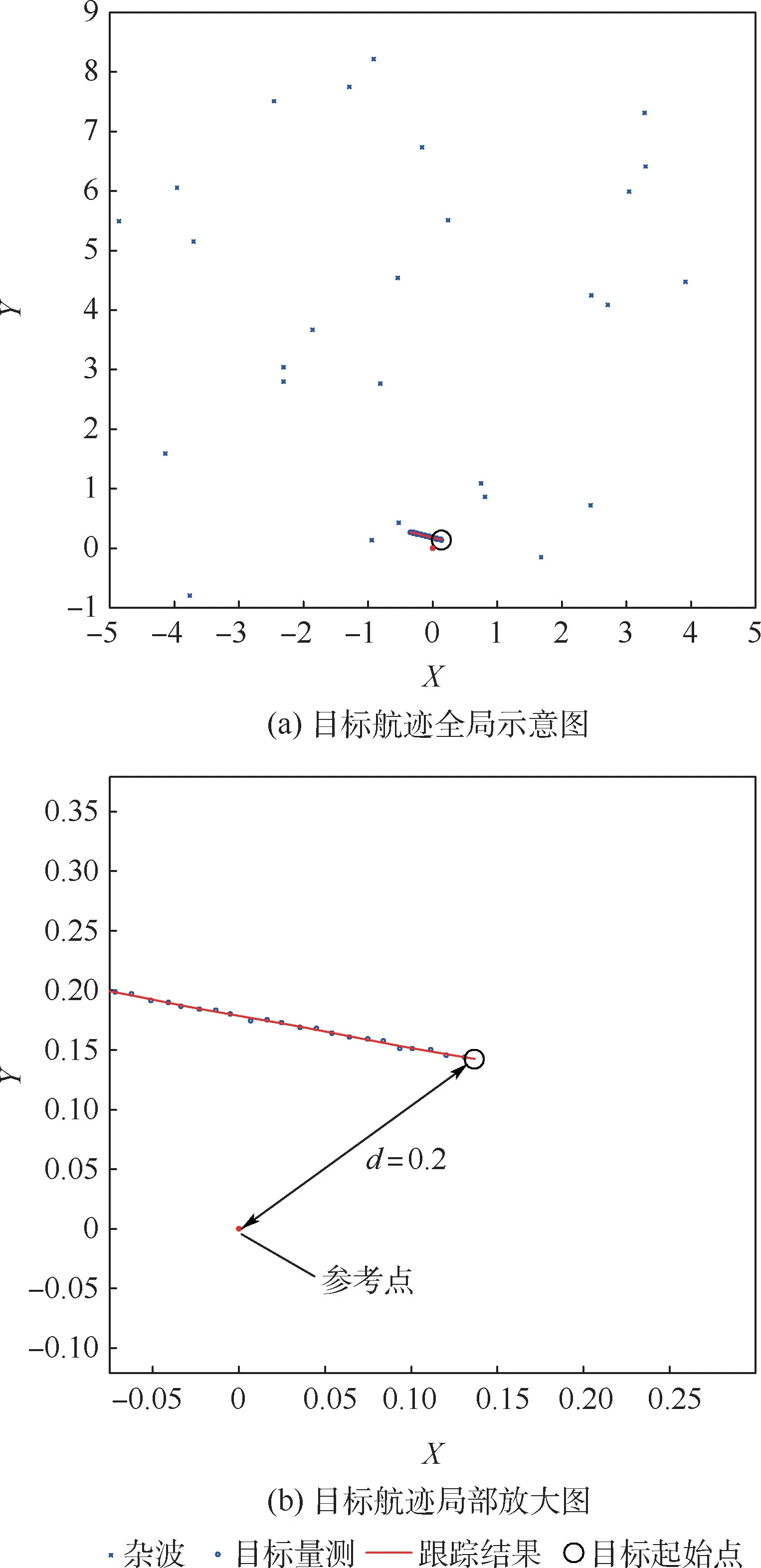
圖3 無延遲起始的目標跟蹤起始仿真數(shù)據(jù)Fig.3 Simulation data of target tracking initiation without initiation delay
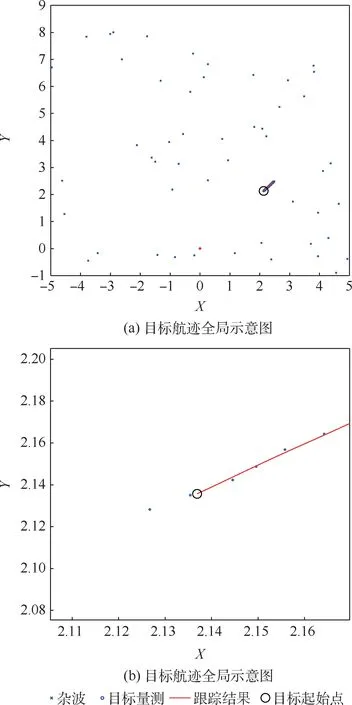
圖4 延遲起始的目標跟蹤起始仿真數(shù)據(jù)Fig.4 Simulation data of target tracking initiation with initiation delay
通過設(shè)置不同的雜波環(huán)境(λ值)和目標航跡起始條件(d值),圖5 和圖6 統(tǒng)計了100 次蒙特卡羅仿真實驗的目標跟蹤結(jié)果的平均值,考察了不同參數(shù)設(shè)置條件下目標跟蹤的穩(wěn)定性與航跡起始的及時性。
圖5 給出了目標航跡起始位置與參考點不同距離情況下(d=0.1, 0.5, 1.5, 2.5, 3)目標航跡起始延遲周期隨雜波環(huán)境的變化情況。 可見,隨著雜波數(shù)量的增加(λ=0 ~1.5),目標航跡起始的延遲周期波動性增加,較多的雜波影響了目標關(guān)聯(lián)的及時性,導致了航跡起始的延遲。 延遲周期曲線的波動性可能與蒙特卡羅實驗的次數(shù)有關(guān),其波動性會隨著實驗次數(shù)的增加而降低。由圖5 的實驗結(jié)果可知,當d<3(d=0.1, 0.5,1.5, 2.5)時,航跡起始延遲周期曲線的取值范圍變化不大,總體上小于1,明顯優(yōu)于3 個掃描周期完成航跡起始的邏輯法[9]。 即使當d= 3時,航跡起始延遲周期曲線的取值仍然總體小于3。
圖6 給出了不同雜波環(huán)境下(λ=0.1, 0.5,1.0, 1.5, 2.0)目標航跡起始的延遲周期隨航跡起始點與參考點距離的變化情況。 與圖5 所得結(jié)論類似,隨著相對距離的增加(d=0 ~2.5),每條航跡起始延遲周期曲線具有一定起伏,但總體取值范圍的變化不大。 另外,當雜波較少時(λ=0.1),航跡起始延遲周期接近于零,幾乎沒有延遲;當λ取值逐漸增大時,航跡起始延遲周期隨之增大,但總體不大于3。
圖5 不同雜波條件下的目標跟蹤延遲周期Fig.5 Target tracking delay period under different clutter conditions
圖6 不同起始條件下的目標跟蹤延遲周期Fig.6 Target tracking delay period under different initiation conditions
表1 給出了λ不同取值情況下航跡起始延遲周期曲線的平均值,全部小于2,低于3 個掃描周期完成航跡起始的邏輯法。 當λ=2.0 時,本文算法所得的航跡起始延遲周期平均值為1.858 3,這是由仿真數(shù)據(jù)中混入的雜波造成的,本文建立的仿真模型中用一部分雜波數(shù)據(jù)替換了目標量測數(shù)據(jù),導致了目標航跡一定程度的延遲起始。
表1 目標航跡起始延遲周期平均值對比Table 1 Comparison of delay periods of target path initiation
3.2 多目標生命周期仿真分析
如圖7 所示,本實驗設(shè)計的仿真總步數(shù)為500,時間步長為0.01,對依次起始的3 個目標航跡進行了仿真。 目標1 的生命周期為t=0 ~5,其從( -0.25, -1.5)出發(fā),在t=0 ~2 以速度(0,1)勻速運動,在t=2 ~4 完成左轉(zhuǎn)彎,在t=4 ~5以速度( -1,0)勻速運動,直至航跡結(jié)束;目標2的生命周期為t=1 ~4.5,其從(0, -1.5)出發(fā),在整個生命周期中以速度(0,1)勻速運動,直至航跡結(jié)束;目標3 的生命周期為t=0.5 ~4.5,其從(0.25, -1.5)出發(fā),在t=0.5 ~3 以速度(0,1)勻速運動,在t=3 ~4 完成右轉(zhuǎn)彎,在t=4 ~4.5以速度(1,0)勻速運動,直至航跡結(jié)束。 目標的真實運動軌跡如圖7 中實線所示,“ 。”代表目標量測,其附加了一定的高斯噪聲,“ ×”代表雜波,其參數(shù)設(shè)置為λ=0.1,均勻地分布在[ -3,2] ×[ -2,3]的區(qū)域內(nèi)。 在數(shù)據(jù)關(guān)聯(lián)中,粒子數(shù)設(shè)定為N=50,pb設(shè)定為0.01,cp設(shè)定為0.02,cd設(shè)定為1/16,目標航跡的起始參考點設(shè)置為(0,0)。
圖7 和圖8 對比了在目標消亡模型設(shè)置不同參數(shù)的情況下3 個目標航跡的跟蹤結(jié)果和目標數(shù)目估計結(jié)果,2 組實驗都實現(xiàn)了雜波環(huán)境中全部目標航跡的及時起始和穩(wěn)定跟蹤。 在航跡終結(jié)時間估計方面,當目標消亡模型中的參數(shù)設(shè)置為α=2 和β=0.5 時,其對目標航跡起始與消亡時間的判斷與真實情況基本相符,如圖7(a)和圖8(a)所示。 當目標消亡模型中的參數(shù)設(shè)置為α=2 和β=2.5 時,其對目標消亡時間的判斷出現(xiàn)延遲,目標2 和目標3 的航跡在t=4.5 均未能及時結(jié)束,導致目標數(shù)據(jù)的估計結(jié)果出現(xiàn)偏差,如圖7(b)和圖8(b)所示。 可見,參數(shù)β通過改變目標航跡與量測關(guān)聯(lián)的中斷時間控制目標消亡概率,β值越大,目標消亡概率越低。
圖7 多目標跟蹤仿真實驗Fig.7 Multi-target tracking simulation experiment
圖8 目標數(shù)目估計Fig.8 Target number estimation
4 探鳥雷達實測數(shù)據(jù)處理
本節(jié)基于探鳥雷達在國內(nèi)某機場獲取的鳥情數(shù)據(jù),采用多目標航跡自動起始跟蹤算法,對機場周邊的鳥類目標數(shù)量進行統(tǒng)計分析。
4.1 系統(tǒng)平臺
圖9 為中國民航科學技術(shù)研究院探鳥雷達實驗系統(tǒng)。 該系統(tǒng)對S 波段導航雷達進行了升級改造,采用可靠性更高且發(fā)射功率較小的固態(tài)發(fā)射機替代原有的磁控管,引入脈沖壓縮和脈沖多普勒等多項信號處理技術(shù),開發(fā)了專門的鳥情數(shù)據(jù)處理與統(tǒng)計分析軟件,改善了其在復雜低空環(huán)境中對飛鳥目標的探測能力,該系統(tǒng)放置于某機場燈光站附近,已獲取并積累了大量機場周邊鳥情信息。

圖9 中國民航科學技術(shù)研究院探鳥雷達實驗系統(tǒng)Fig.9 CAST experimental avian radar system
4.2 鳥情數(shù)據(jù)處理分析
機場周邊的鳥類活動通常遵循一定規(guī)律,利用探鳥雷達獲取的機場及周邊區(qū)域鳥情信息,對機場留鳥的活動節(jié)律進行統(tǒng)計分析,能夠掌握機場周邊的鳥類數(shù)量與分布情況。 本節(jié)基于中國民航科學技術(shù)研究院探鳥雷達實驗系統(tǒng)獲取的國內(nèi)某機場飛鳥目標數(shù)據(jù),給出了機場周邊鳥類目標數(shù)量進行統(tǒng)計分析的基本步驟及實例。
1) 鳥類活動時段統(tǒng)計
基于探鳥雷達獲取的該機場某日的鳥情信息,統(tǒng)計探鳥雷達監(jiān)視范圍內(nèi)全天中每小時出現(xiàn)的飛鳥目標量測數(shù)量,經(jīng)統(tǒng)計,第8 個時段(7:00—8:00)和第18 個時段(17:00—18:00)出現(xiàn)了2 次鳥類活動高峰。 結(jié)合機場周邊的鳥情人工調(diào)研結(jié)果,該機場周邊的鳥類通常會在機場周邊筑巢,并在特定時間進入飛行區(qū)覓食。 以上雷達觀測結(jié)果與人工調(diào)研結(jié)果吻合,這2 個時間段可以判定為周邊鳥類的離巢和歸巢時間。
2) 鳥類活動網(wǎng)格分布統(tǒng)計
在探鳥雷達的監(jiān)控范圍內(nèi)劃分網(wǎng)格,該區(qū)域面積為L×L,單位為m2。 每個網(wǎng)格的面積為l×l,單位為m2。 本例中,探鳥雷達的覆蓋半徑為3 km,L=6 000 m,l=100 m,監(jiān)控范圍內(nèi)網(wǎng)格總數(shù)為60 ×60,如圖10 所示,左上角設(shè)置為坐標系原點(0,0),X軸水平向右,Y軸垂直向下。 在機場周邊的鳥類離巢時間段(7:00—8:00)內(nèi),鳥類目標量測超過一定閾值的網(wǎng)格均做顏色標記。 對于標記后的網(wǎng)格分布圖進行腐蝕和膨脹等二值圖像處理,消除其中的孤立點,形成圖10 所示的連通區(qū)域即熱點,結(jié)合機場周邊的鳥情調(diào)研結(jié)果,可判定為鳥類的棲息地。 以該熱點區(qū)域的中心點作為目標起始的參考點,本例中,該參考點坐標為(4 750,2 650) m。
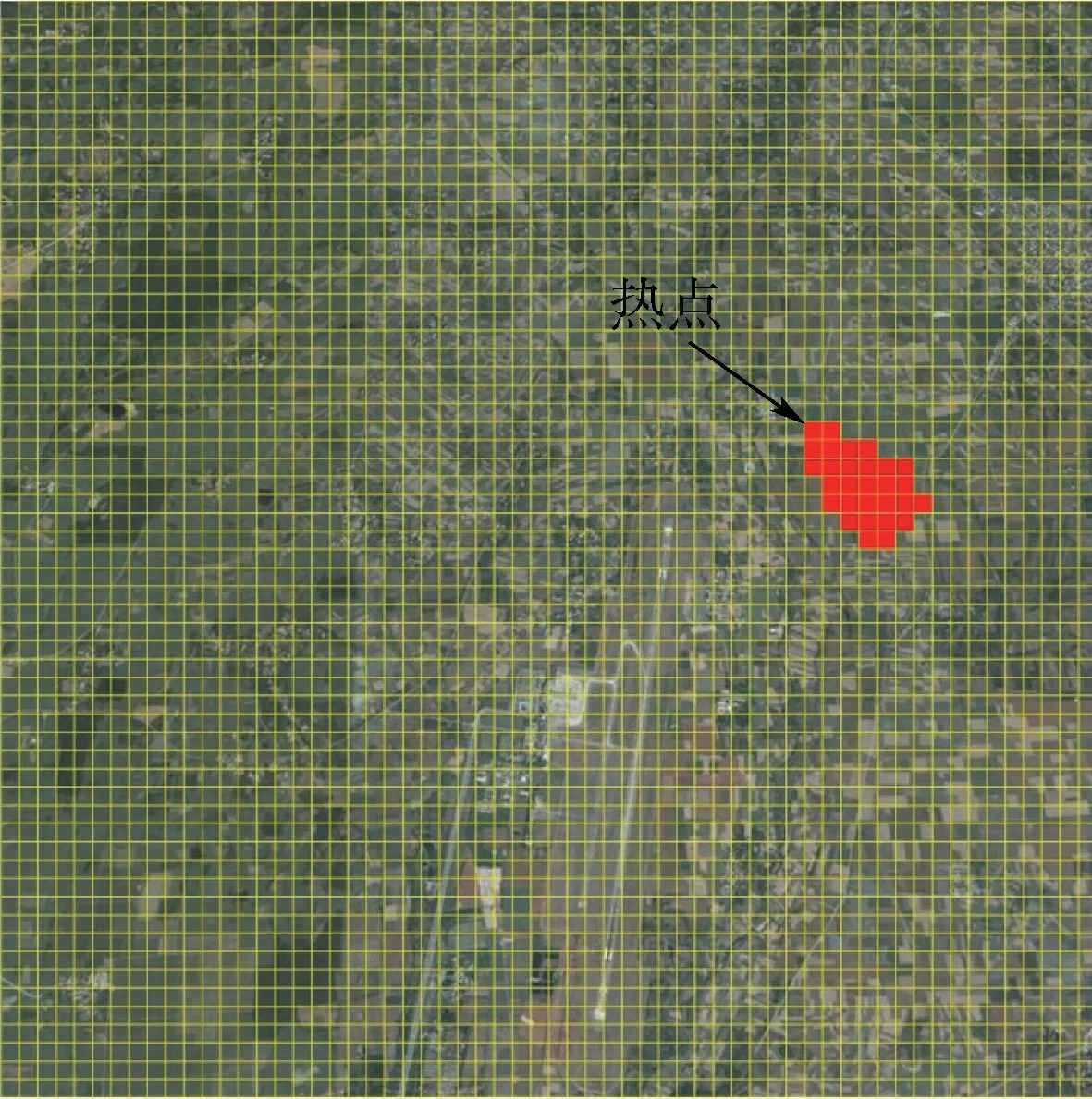
圖10 機場周邊鳥類活動熱點統(tǒng)計結(jié)果Fig.10 Hot spot statistics of bird activities around airport
3) 鳥類數(shù)量統(tǒng)計分析
圖11 為某日清晨鳥類飛離熱點區(qū)域內(nèi)棲息地的飛行軌跡分布情況,包括雷達覆蓋范圍內(nèi)的全局圖和鳥類飛行軌跡的局部放大圖。 該鳥類棲息地位于飛行區(qū)外東北方向,圖11 的離巢過程發(fā)生在7:00—8:00 之間,持續(xù)約1 min,種群數(shù)量在20 只左右,飛行方向大體為西南,通常會進入飛行區(qū)取食。

圖11 鳥類飛行軌跡分布Fig.11 Flight path distribution of birds
圖12 為不同日期清晨7:00—8:00 對該棲息地內(nèi)離巢鳥類目標數(shù)量進行估計的結(jié)果,目標跟蹤時間持續(xù)約70 s。 在數(shù)據(jù)關(guān)聯(lián)中,粒子數(shù)設(shè)定為N=50,pb設(shè)定為0.01,cp設(shè)定為0.02,cd設(shè)定為1/16,目標航跡的起始參考點設(shè)置為(4 750,2 650)m。 目標消亡模型中的參數(shù)設(shè)置為α= 2和β=0.5。 以每次鳥類目標數(shù)目估計過程中的最大值作為該種群數(shù)量的估計值,因此,第1 次估計結(jié)果為23 只,第2 次估計結(jié)果為22 只。 表2給出了該棲息地連續(xù)10 天的鳥類目標數(shù)量統(tǒng)計結(jié)果。 可見,該鳥類的種群數(shù)量約20 ~30 只,且與人工觀測結(jié)果基本吻合。
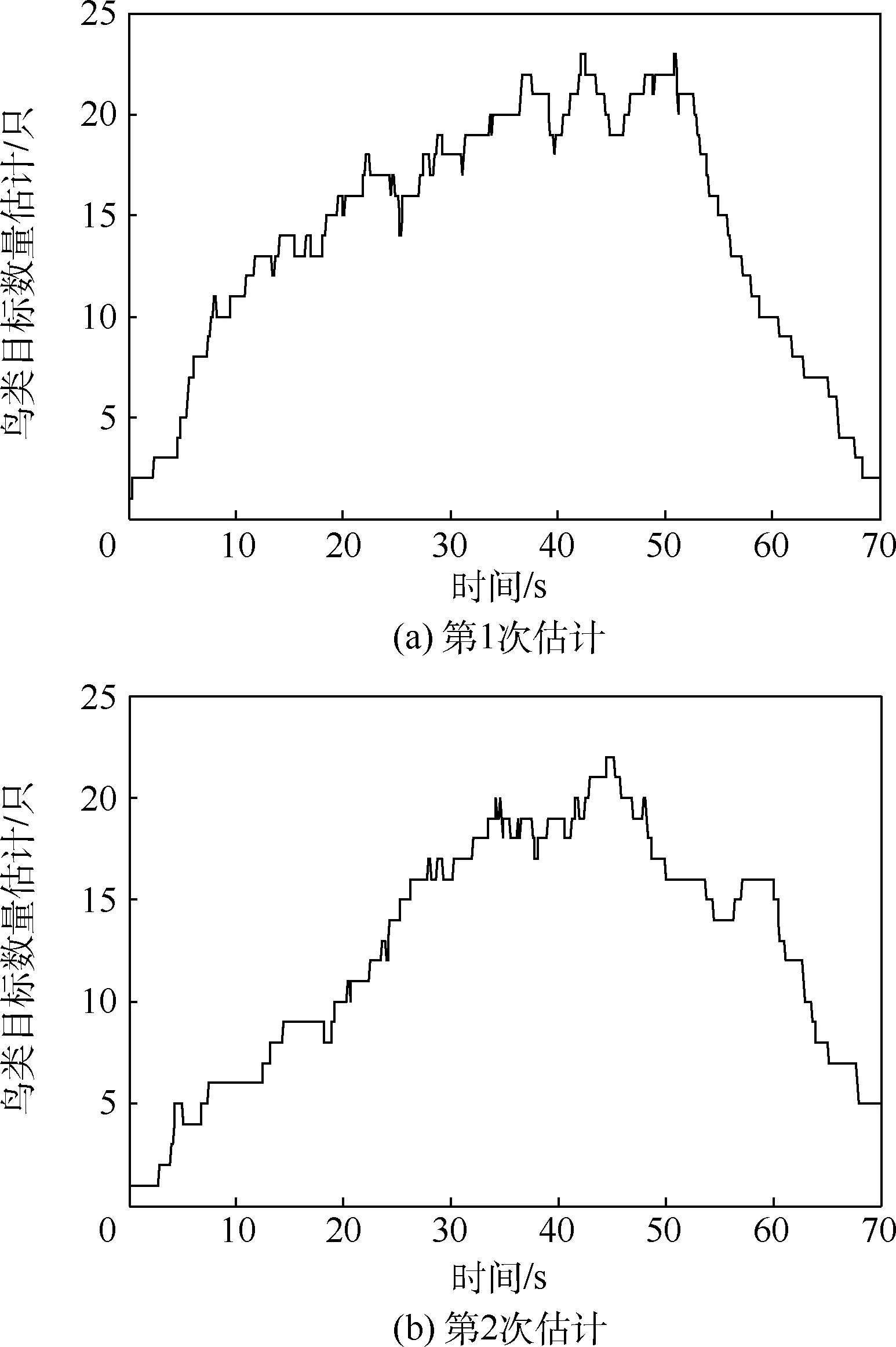
圖12 鳥類數(shù)量估計Fig.12 Bird number estimation
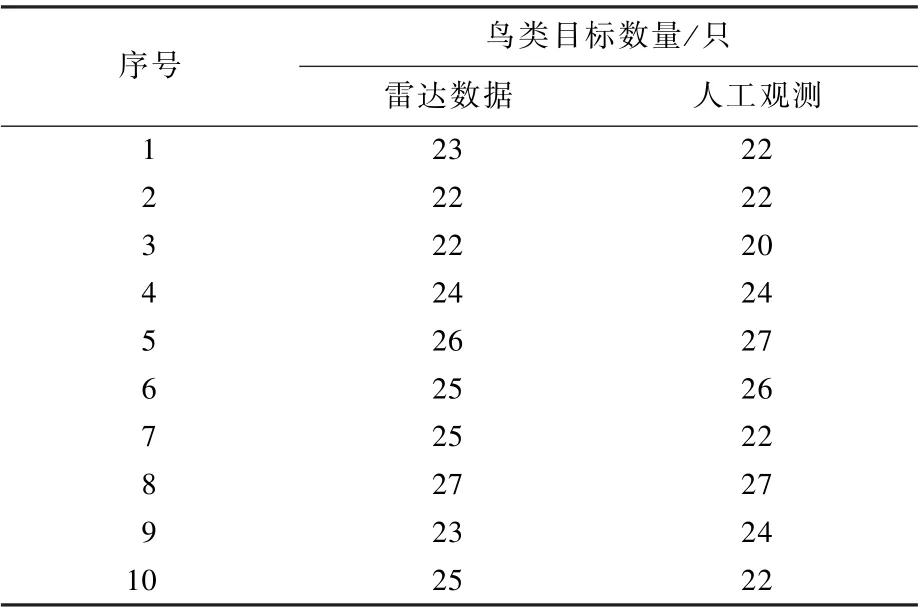
表2 鳥類目標數(shù)量估計結(jié)果Table 2 Estimation results of bird target number
5 結(jié) 論
本文基于粒子濾波數(shù)據(jù)關(guān)聯(lián)算法,通過建立目標的新生與消亡模型,較好地實現(xiàn)了雜波環(huán)境中雷達多目標的自動起始跟蹤,并將其成功應(yīng)用于機場周邊的鳥類目標數(shù)量估計問題,得出以下結(jié)論:
1) 本文提出的自動起始跟蹤算法在數(shù)據(jù)關(guān)聯(lián)之前設(shè)定了一個公共的新生目標起始關(guān)聯(lián)點,通過計算量測值與該起始點的關(guān)聯(lián)概率,判斷其是否屬于新生目標。 該起始關(guān)聯(lián)點的選擇基于對目標運動軌跡起始范圍的掌握,在一定程度上依賴先驗知識。
2) 通過仿真實驗證明,本文算法在目標起始的及時性方面明顯優(yōu)于3 個或4 個掃描周期起始的邏輯法,即使在雜波環(huán)境中,其目標起始的延遲周期仍然小于2。
3) 本文算法的局限性在于其適用于目標起始區(qū)域范圍相對集中的多目標自動起始跟蹤問題,對于目標起始點分散的情況,工程應(yīng)用中仍推薦3 個或4 個掃描周期起始的邏輯法。
4) 將本文算法應(yīng)用于機場周邊的鳥類數(shù)量統(tǒng)計分析,能夠掌握機場周邊鳥類的棲息地分布、種群數(shù)量及活動規(guī)律,進而指導機場開展有針對性的生態(tài)環(huán)境治理措施,有效提升機場鳥擊防范科學水平。
猜你喜歡
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42