水電機組動態盤車數據采集與分析系統
2021-09-14 00:30:30秦爽陳超金文寶梁雪山郭桉麟
電腦知識與技術 2021年22期
秦爽 陳超 金文寶 梁雪山 郭桉麟


摘 要:針對傳統盤車精度差、耗時長、缺乏精確調整方法等問題。采用當下流行的計算機有關技術、傳感器技術、無線通信技術,研究并且開發了水電機組動態盤車數據采集與分析系統。該系統可以提高軸線檢測處理的效率以及準確性,能加快軸線的處理速度,提高盤車的工作效率,節約人力物力,縮短檢修工期。
關鍵詞:動態盤車;數據采集;數據分析
中國水電系統經過20年的快速發展,現在水電裝機總容量已經超過了2億KW,建成大中小水電站超過了4.5萬座。水電機組是水力發電廠的關鍵設備,機組運行的狀態直接影響水力發電廠的安全運行。水電機組盤車是調整水輪機軸與發電機軸軸線的過程,在水電站大修過程中,盤車的時間和精度對于大修質量和大修時間影響巨大。隨著越來越多水電機組的投入運行,自動化盤車系統大量應用于機組檢修。但這些盤車系統僅解決了自動轉動問題,并不能提高盤車的速度與工藝,且已有自動化盤車系統造價高、維護復雜,無法得到很好的應用。
針對傳統盤車存在測量點數量少、人工記錄有誤差、盤車耗時長等問題,提出了一種能夠滿足任意測點和快速高精度連續盤車需要的系統。在詳細闡述系統體系基礎上,給出了軟件平臺的關鍵技術與實現措施。該分析系統具備實用性強、精確度高、工作效率高、盤車方法現代等優點,因此具有非常好的應用和推廣價值。
本文根據水電機組盤車的實際情況,探索了動態測量方式而且能夠自動出具調整方案,研發出了一種契合實際的水電機組動態盤車數據采集與分析系統。系統采用現代的傳感器與快速采集裝置實現等分點動態盤車測量,計算機同時記錄數據并給出合理的盤車調整方案。
1動態盤車裝置的優點
與傳統盤車工藝做出比較后發現,動態盤車裝置具備下列優點:
1)盤車裝置安裝、裝配、非常簡便而且操作也很容易,能夠適應工作人員的工作環境和工作條件,能夠降低工人的勞動強度,提高了工人的工作效率;排除了盲目、超負荷驅動的隱患,從根本上確保了人員和設備的安全,適合在水電站中運用和推廣。
2)力的作用點以及作用方向符合常規,均勻的轉速、傳動比合理、驅動較平衡、停點定位精確,為了使轉子于充分、自由的狀態下讀取精確的數據可以通過正反轉控制的方式,軸向、徑向無干擾,這些關鍵點能保證測量數據客觀有效,因此提高了盤車的測量準確度。
3)動態盤車利用傳感器控制百分表進行自動取數,同時系統軟件同步記錄數據,在盤車過程中無須再像傳統盤車方式進行間斷記錄數據,大大提高了盤車的工作效率。
2 總體設計思路
系統采用先進的無線通信技術、計算機技術、傳感器技術,研發了一個用于水電機組檢修的“水電機組動態盤車數據采集與分析系統”,能夠加快“多點等分角度”軸線數據工作速度也可以讓數據得到連續采集與處理,檢修工期可以大大縮短,進而提高軸線處理的質量。
系統對于測量軸線的徑向位移使用的是德國的高級百分表,運用色標傳感器識別各測點方位。計算機通過無線傳輸技術將采集端的數據收集到本地系統,數據分析處理軟件將根據采集得到的數據進行分析計算,以完成數據的分析與處理。根據機組軸線的狀態用圖形圖像的方式展示出來,然后給出關于軸線處理的合理建議。系統結構示意圖如圖1所示。
3 系統平臺設計
本系統是基于C語言開發的。基本過程是通過傳感器采集數據,然后通過無線傳輸進行數據上傳。
基本主要過程:
1)傳感器感應
傳感器標定是保證動態盤車連續采樣的前提。因為本系統要求可以進行動態連續采集“多個點且等分角度”數據,所以在進行盤車的時候要對被測位置的精確擺度值進行一個連續的采集,故要對大軸上的合適位置安裝傳感器,當到達指定色標,傳感器收到信號進行激活。
2)盤車數據采集
數據采集是需要動態盤車裝置勻速連續的驅動下才可以完成,針對水電機組的法蘭、上導、水導、鏡板等部位的測點使用色標傳感器進行并行連續地控制采樣,利用系統平臺的驅動程序記錄顯示的過程。并行連續采樣與顯示有兩個關鍵點需要解決:一是盤車具有的多個被測部位:如法蘭、上導、水導等部位,必須要確保被測部位數據的同步性在進行盤車的時候。二是如何保證實時連續的顯示問題。由于電廠具有電磁環境,所以容易受到電磁的沖擊干擾等,為了保證采集數據的可靠性,需要對于因干擾而產生的無線傳輸誤差進行規避。
3)盤車無線通信設備
應用數傳電臺的現代技術讓軟件系統與測量工具二者之間能夠進行雙向通信,選擇半雙工制串行的通信方式。數傳電臺具有成本造假低、效率高、可靠性好、功能結構簡單、用戶編程范圍廣、傳輸方便快捷等多種優點,能應用于控制系統和很多測量系統中。
本系統包括的主要功能如下:
1)機組類型選擇模塊:登錄系統之后在此界面進行機組類型選擇。
2)機組安裝及拆卸流程演示模塊:此模塊的功能是對非專業人員進行簡單的盤車結構展示以及拆卸安裝流程,還可以查看盤車結構示意。
3)盤車數據采集模塊:通過此模塊可以設置盤車機組的參數并且通過盤車測量采集到各個部位的擺度值。
4)盤車數據處理模塊:該模塊能夠對盤車的采集數據進行計算并且能夠分析盤車擺度曲線還可以對盤車軸線的狀態進行展示。
5)盤車軸線處理模塊:具有軸線故障診斷功能和盤車軸線狀態示意圖展示功能。
6)盤車軸線仿真調整模塊:給出盤車調整方案并且具有盤車軸線調整仿真模擬功能。
7)盤車報告打印模塊:供用戶進行相應的關鍵數據的打印。系統功能模塊劃分如圖2所示。
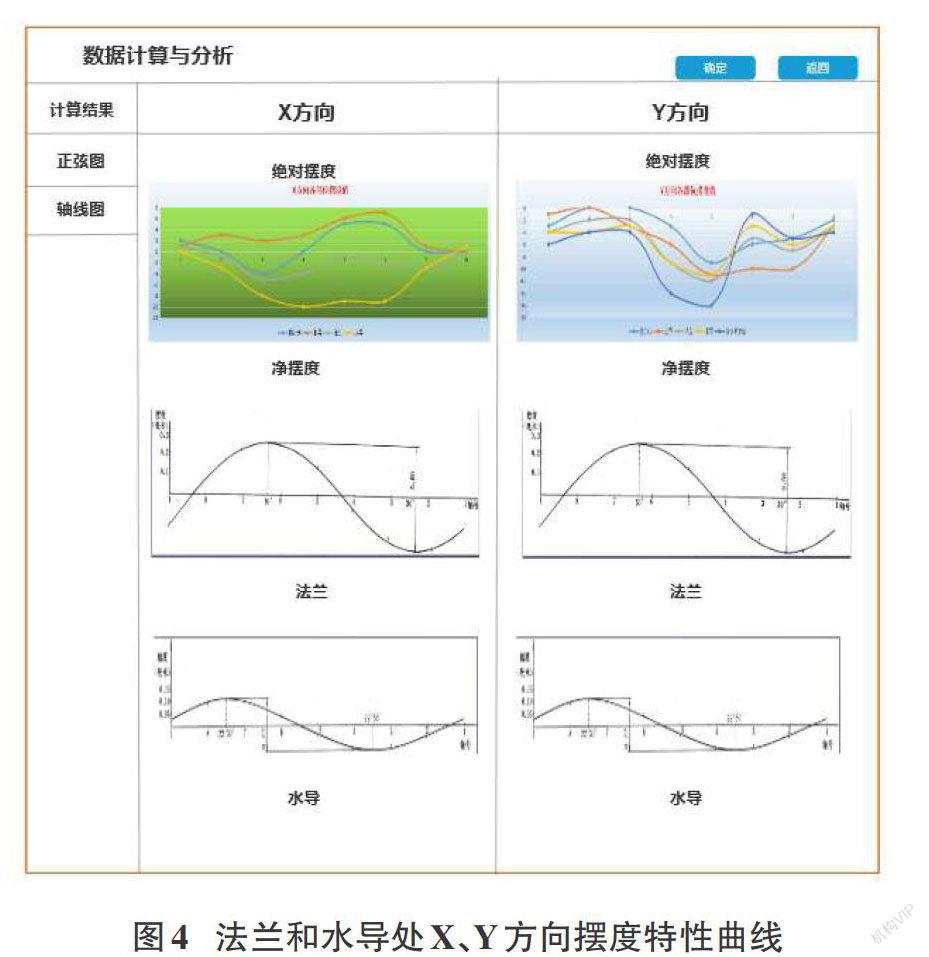
3.1盤車數據記錄分析
該模塊擺度測量裝置采集上導、法蘭、水導等的X、Y方向的擺度,定點設置盤車的等分點數,盤車數據記錄主要是測量各個部位的擺度值。根據盤車裝置測量出主軸各個代表性部位的相關擺度值,分析機組軸線的狀態然后計算出它的垂直度(其中包括發電機主軸相對鏡板的垂直度,水輪機主軸相對發電機主軸法蘭面的垂直度),為軸線處理工作提供依據。軸線測量是整個軸線工作的基礎。此界面右側是實時盤車圖,盤車圖的作用是在盤車過程中對測量點進行實時觀察然后觀測數據,它可以查看到傳感器測出的實時數據。圖3為該系統軟件的數據采集界面。
猜你喜歡
農業與技術(2016年15期)2016-11-09 17:43:03
科技視界(2016年18期)2016-11-03 22:51:40
中國科技博覽(2016年22期)2016-11-01 16:58:26
體育時空(2016年8期)2016-10-25 18:02:39
軟件工程(2016年8期)2016-10-25 15:54:18
軟件工程(2016年8期)2016-10-25 15:52:53
現代經濟信息(2016年19期)2016-10-20 17:46:29
中國科技博覽(2016年18期)2016-10-19 10:30:11
中國市場(2016年36期)2016-10-19 04:31:23
商場現代化(2016年22期)2016-10-18 19:11:00
