城市典型場景下低成本GNSS RTK定位性能評估與分析
2021-10-16 02:13:02王曉萌程正逢劉萬科
綠色科技 2021年18期
徐 輝,王曉萌,程正逢,陳 功,劉萬科,胡 勇
(1.中國電力工程顧問集團(tuán)中南電力設(shè)計院有限公司,湖北 武漢 430071;2.武漢大學(xué),湖北 武漢 430071)
1 引言
隨著GNSS精密定位技術(shù)的不斷發(fā)展,人們對于高精度定位的需求也在不斷提高,尤其在車載LBS服務(wù)或車聯(lián)網(wǎng)、自動駕駛等服務(wù)中,低成本導(dǎo)航定位存在較大需求。在城市典型環(huán)境(建筑密集、樹蔭遮擋、立交等)中,低成本GNSS接收機(jī)定位性能將大打折扣,這直接影響導(dǎo)航定位的實(shí)時性和精度。因此,分析低成本GNSS接收機(jī)在城市典型環(huán)境中的定位性能可為低成本導(dǎo)航定位應(yīng)用提供有效參考。
為了驗(yàn)證低成本GNSS接收機(jī)RTK定位的可行性,國內(nèi)外學(xué)者進(jìn)行了一系列分析。Takasu等通過對低成本單頻天線、GPS接收機(jī),與測量型天線、接收機(jī)比較,發(fā)現(xiàn)低成本GNSS天線性能較差,接收機(jī)模塊之間性能相差不大[1]。Odolinski等通過對單頻GPS/BDS雙系統(tǒng)低成本u-blox接收機(jī)與雙頻單GPS系統(tǒng)測量型接收機(jī)進(jìn)行RTK測量,發(fā)現(xiàn)單頻GPS/BDS雙系統(tǒng)低成本u-blox接收機(jī)與雙頻單GPS系統(tǒng)測量型接收機(jī)定位性能相當(dāng)[2,3]。He等對低成本的單頻GPS/BDS雙系統(tǒng)接收機(jī)和雙頻單GPS系統(tǒng)接收機(jī)進(jìn)行RTK定位,發(fā)現(xiàn)在開闊環(huán)境下,單頻GPS/BDS雙系統(tǒng)接收機(jī)與雙頻單GPS系統(tǒng)接收機(jī)單歷元RTK定位的可用性和可靠性相當(dāng)[4]。Zhang等對低成本的單頻u-blox接收機(jī)在靜態(tài)和動態(tài)條件下的定位性能進(jìn)行分析,結(jié)果表明在靜態(tài)開闊環(huán)境下,水平方向上的精度可以達(dá)到亞厘米級,在動態(tài)環(huán)境下可以獲得分米級的定位精度[5]。此外,眾多學(xué)者通過對不同場景的靜態(tài)、動態(tài)實(shí)測RTK實(shí)驗(yàn)結(jié)果分析發(fā)現(xiàn),低成本GNSS接收機(jī)在長時間的觀測下,其靜態(tài)定位精度可以達(dá)到厘米級,在動態(tài)模式下定位結(jié)果精度也能滿足基本定位需求,但是在城市峽谷、樹蔭遮擋等環(huán)境下能否達(dá)到大眾市場的PVT應(yīng)用需求有待進(jìn)一步分析[6~12]。
綜上所述,在低成本單頻與雙頻RTK定位方面,雖然取得了較多的研究成果,但主要是針對RTK的可行性分析,對定位結(jié)果的研究也主要集中在靜態(tài)數(shù)據(jù)或者開闊環(huán)境下的動態(tài)數(shù)據(jù),對低成本接收機(jī)在城市典型場景下的單頻與雙頻定位性能的詳細(xì)分析較少。因此,本文選擇目前國內(nèi)外廣泛應(yīng)用的夢芯T906B和u-blox ZED-F9P雙頻低成本接收機(jī),通過對比兩種接收機(jī)在城市典型場景下單頻與雙頻的RTK定位性能,從模糊度固定率、定位精度方面分場景進(jìn)行了細(xì)致評估低成本GNSS接收機(jī)雙頻較單頻定位性能改善情況。
2 GNSS相對定位模型
RTK是一種利用GNSS載波相位觀測值進(jìn)行實(shí)時動態(tài)定位的技術(shù)[13]。RTK定位主要包括雙差浮點(diǎn)解解算和模糊度固定兩個步驟,雙差浮點(diǎn)解部分給出函數(shù)模型和隨機(jī)模型,模糊度固定采用應(yīng)用廣泛的LAMBDA法。下面對此過程進(jìn)行簡單介紹。
2.1 函數(shù)模型
采用雙差觀測模型時,可消除接收機(jī)和衛(wèi)星鐘差;在城市環(huán)境下,通常采用短基線,利用參考站和移動站之間觀測誤差的空間相關(guān)性,通過差分可以消除或削弱移動站觀測數(shù)據(jù)中的大部分誤差。無論采用單頻還是雙頻解算,其相對定位模型相同,只是數(shù)據(jù)的預(yù)處理存在差別。因此,其基本的觀測方程為:
(1)
(2)
2.2 隨機(jī)模型
隨機(jī)模型是對隨機(jī)噪聲水平及其相關(guān)性的反應(yīng),不同系統(tǒng)衛(wèi)星產(chǎn)生的噪聲對GNSS定位結(jié)果及模糊度的解算都有很大的影響。常用的隨機(jī)模型確定方法主要包括高度角法、信噪比法以及方差分量估計法等,其中方差分量估計法應(yīng)用時需要反復(fù)迭代,計算量過大,在實(shí)際解算中應(yīng)用較少;高度角模型能夠更好地反映接收機(jī)噪聲和大氣延遲的影響;信噪比模型則對測站相關(guān)的誤差更敏感,尤其是多路徑效應(yīng)。因此,本文采用信噪比模型,其定權(quán)公式如下式:
(3)
式(3)中,S為實(shí)測信噪比,Bi為相位跟蹤環(huán)帶寬,λi為載波相位波長,Ci為經(jīng)驗(yàn)參數(shù)。在此基礎(chǔ)上,建立一種簡化的指數(shù)函數(shù)隨機(jī)模型,即
(4)
式(4)中,S0為參考信噪比,σ0為觀測值在參考信噪比下的標(biāo)準(zhǔn)差,a為放大因子。
2.3 參數(shù)估計與模糊度固定
設(shè)線性化后的雙差觀測方程如下:
(5)
式(5)中,y表示偽距和載波相位觀測值;a和b分別表示模糊度參數(shù)和基線向量參數(shù);A和B為相應(yīng)的系數(shù)矩陣;Δ為觀測噪聲。
對式采用最小二乘或卡爾曼濾波進(jìn)行參數(shù)估計,可獲模糊度參數(shù)和基線向量參數(shù)的浮點(diǎn)估值,其精度約為分米級。而實(shí)現(xiàn)整周模糊度固定后,可獲得厘米級的高精度定位結(jié)果。本文模糊度固定采用Teunissen教授提出的最小二乘降相關(guān)平差法(Least-squares Ambiguity Decorrelation Adjustment, LAMBDA),其對模糊度方差-協(xié)方差陣進(jìn)行整數(shù)高斯變換以有效地降低方差分量間的相關(guān)性,最大限度地壓縮搜索橢球以減少搜索過程中的節(jié)點(diǎn)數(shù),提高搜索效率,是目前高精度導(dǎo)航定位中快速求解模糊度最成功的算法之一[14]。
LAMBDA方法采用最小二乘準(zhǔn)則求解模糊度固定解,其目標(biāo)函數(shù)為:
(6)
由于模糊度本身具有整數(shù)特性,最小二乘問題轉(zhuǎn)換為整數(shù)最小二乘問題,其無法直接求解得到,而是通常采用搜索的方式來選出最優(yōu)的模糊度候選解,本文選用目前最為流行的基于震蕩式收縮策略的SEVB算法進(jìn)行模糊度搜索[15],并在搜索完成采用Ratio檢驗(yàn)方法對模糊度最優(yōu)候選解的可靠性進(jìn)行驗(yàn)證[16]。
3 城市典型場景定位性能分析
3.1 實(shí)驗(yàn)設(shè)計
本文選用了目前市面上典型的夢芯T906B和u-blox ZED-F9P低成本雙頻接收機(jī),可以提供多系統(tǒng)雙頻定位,標(biāo)稱厘米級定位精度,收斂時間短且性能可靠,廣泛應(yīng)用于測量測繪、導(dǎo)航定位服務(wù)以及消費(fèi)類車載導(dǎo)航等領(lǐng)域。表1為兩款設(shè)備的部分技術(shù)指標(biāo)。
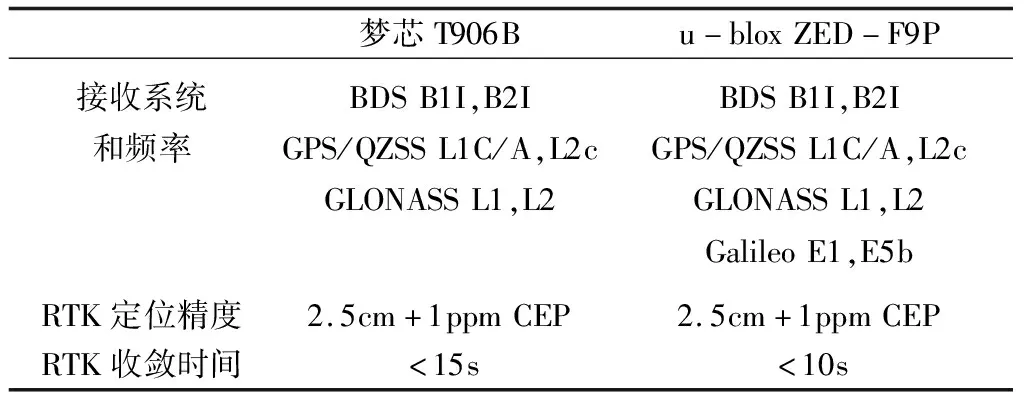
表1 夢芯T906B和u-blox ZED-F9P設(shè)備比較
為了對比測試城市典型場景下單頻與雙頻RTK定位性能,在湖北省武漢市城區(qū)開展了車載動態(tài)實(shí)驗(yàn),采集了夢芯T906B和u-blox ZED-F9P的動態(tài)RTK數(shù)據(jù)。軌跡圖如圖1所示,實(shí)驗(yàn)途經(jīng)街道口、八一路、光谷和新竹路等地方,包含了開闊、半遮擋、遮擋等豐富的觀測場景。

圖1 實(shí)驗(yàn)路線圖(為開闊場景,和為復(fù)雜場景)
測試過程中,設(shè)備安裝如圖2所示,夢芯T906B和u-blox ZED-F9P接收機(jī)分別與一個u-blox低成本雙頻天線連接,NovAtel FSAS高精度參考系統(tǒng)數(shù)據(jù)由IE(InertialExplore)軟件后處理,通過導(dǎo)航中心坐標(biāo)歸算可獲取高精度動態(tài)定位結(jié)果,作為實(shí)驗(yàn)的參考真值。

圖2 設(shè)備安裝圖
3.2 數(shù)據(jù)情況
實(shí)驗(yàn)數(shù)據(jù)采集于2021年1月3日,采集時長約2h,采樣間隔為1s,約7200個歷元。下面簡單介紹一下數(shù)據(jù)的衛(wèi)星數(shù)和DOP值情況。
圖3為夢芯T906B和u-blox ZED-F9P所觀測到的衛(wèi)星天空圖。其中夢芯T906B主要能接收到BDS、GPS、GLONASS三系統(tǒng),u-blox ZED-F9P可接收到BDS、GPS、GLONASS和Galileo四系統(tǒng)。總體上,兩種設(shè)備的觀測值相差不大,在低高度角時,衛(wèi)星的跟蹤都存在部分中斷情況。

圖3 衛(wèi)星天空圖
圖4為夢芯T906B和u-blox ZED-F9P在觀測時段內(nèi)的衛(wèi)星數(shù)與DOP值,可以看到,在開闊區(qū)域,夢芯T906B和u-blox ZED-F9P接收的衛(wèi)星數(shù)保持在25顆以上,DOP值穩(wěn)定在2以下,而在半遮擋和遮擋區(qū)域,可使得衛(wèi)星數(shù)降至20顆以下,DOP值達(dá)到4左右,可見遮擋環(huán)境對衛(wèi)星數(shù)和DOP值影響較大。
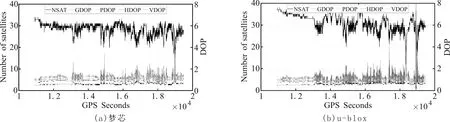
圖4 衛(wèi)星數(shù)與DOP值
3.3 定位性能分析
3.3.1 數(shù)據(jù)處理策略
對采集的動態(tài)數(shù)據(jù)利用武漢大學(xué)研制的高精度GNSS 動態(tài)定位軟件進(jìn)行事后仿真RTK實(shí)時處理,數(shù)據(jù)處理策略如表2所示。
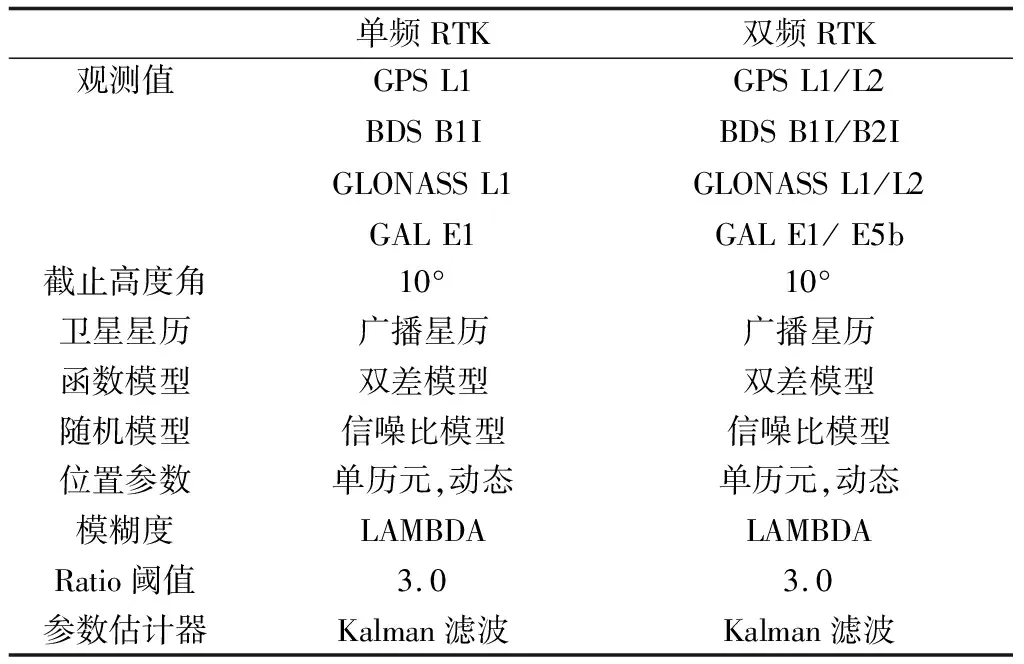
表2 數(shù)據(jù)處理策略
3.3.2 全程定位性能分析
為測試低成本GNSS接收機(jī)的單頻與雙頻定位性能,解算全程數(shù)據(jù)的模糊度固定率和定位誤差序列,分析全程定位性能。
整周模糊度解算是否正確直接影響RTK定位的精度,而模糊度固定的性能可以通過模糊度固定率來體現(xiàn)。模糊度固定率(ratio≥3)可以表示為:
(7)
式(7)中,nfixed表示固定歷元數(shù),nsum表示總歷元數(shù)。
由表3可知,采用夢芯T906B和u-blox ZED-F9P的模糊度固定率均達(dá)到了55%以上,且雙頻固定率均高于單頻,而夢芯的固定率略優(yōu)于u-blox。

表3 夢芯T906B與u-blox ZED-F9P模糊度固定率
如圖5和圖6所示為夢芯T906B和u-blox ZED-F9P單頻與雙頻定位誤差序列,可以看到,雙頻定位結(jié)果較單頻。通常采用計算E、N、U方向誤差RMS來分析RTK定位性能,但RMS的結(jié)果在計算中容易受到粗差的干擾,因此,采用(68.27%)誤差統(tǒng)計值來作為定位精度指標(biāo)。由表4可知,采用夢芯T906B和u-blox ZED-F9P雙頻的定位精度均優(yōu)于單頻,但u-blox ZED-F9P的雙頻較單頻優(yōu)勢更為明顯。在條件下,夢芯T906B雙頻較單頻在E、N、U方向分別提升21.7%、10.3%、5.9%,u-blox ZED-F9P雙頻較單頻在E、N、U方向分別提升55.3%、78.4%、67.0%。夢芯T906B單頻與雙頻的定位精度為厘米級,u-blox ZED-F9P的單頻定位精度為分米級,雙頻定位精度為厘米級。

圖5 夢芯T906B單頻與雙頻解算結(jié)果
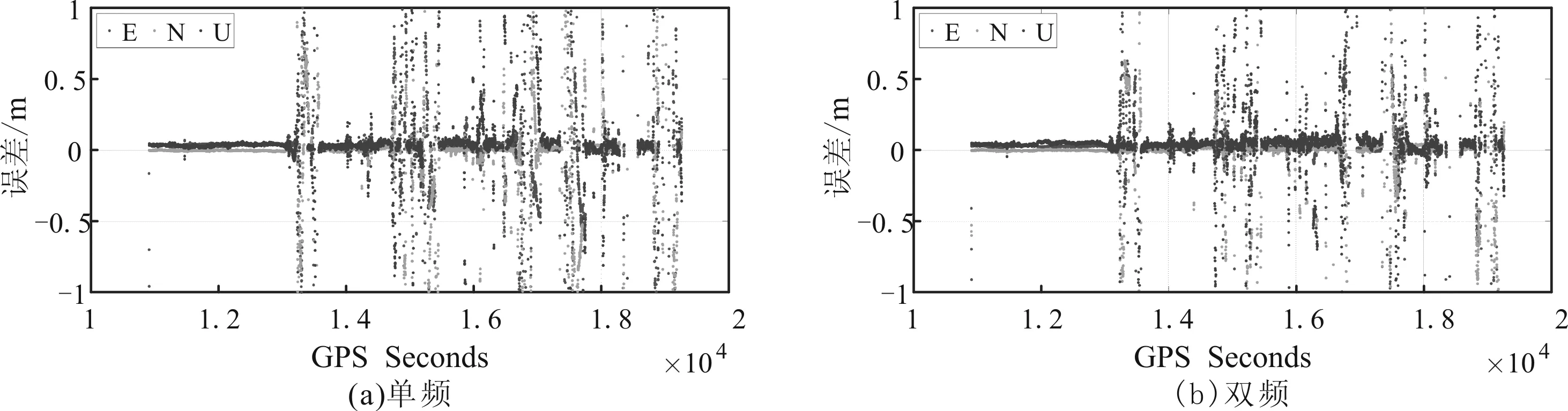
圖6 u-blox ZED-F9P單頻與雙頻解算結(jié)果
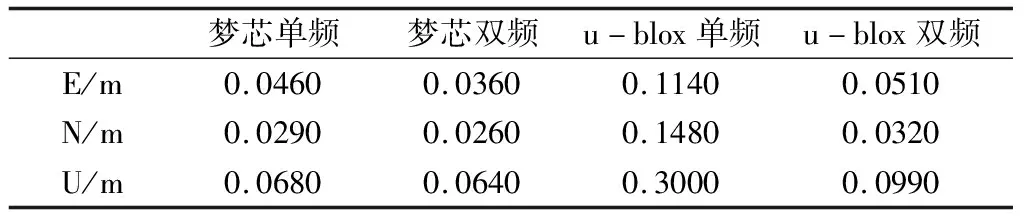
表4 夢芯T906B與u-blox ZED-F9P定位RMS(1σ)
3.3.3 分場景定位性能分析
對城市典型場景進(jìn)行分場景定位性能分析,將測試場景分為開闊區(qū)域,半遮擋區(qū)域和遮擋區(qū)域(圖1),分別分析在不同場景下低成本GNSS接收機(jī)單頻與雙頻的模糊度固定率和定位性能(如表5和表6所示)。

表5 夢芯T906B與u-blox ZED-F9P在不同場景下的固定率
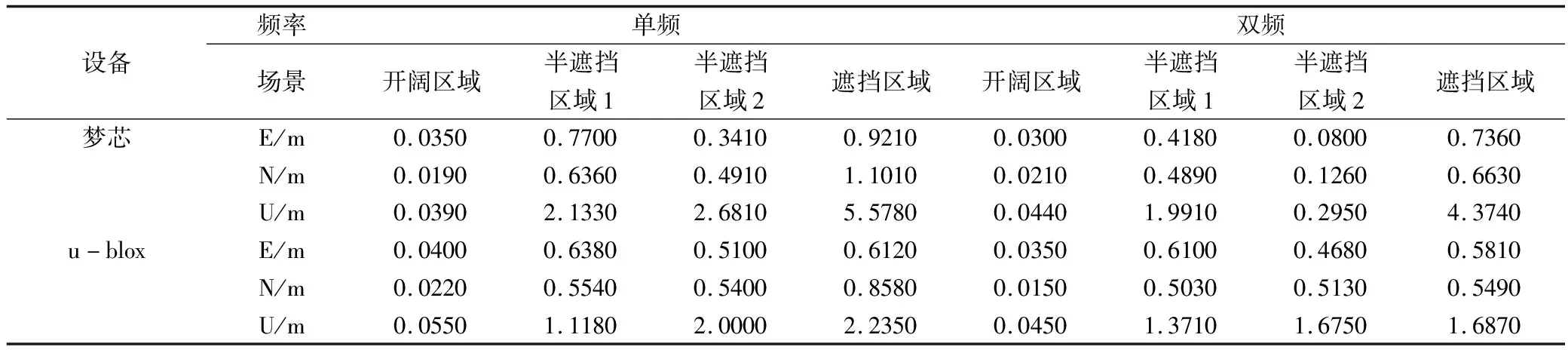
表6 夢芯T906B與ublox ZED-F9P在不同場景下定位RMS(1σ)
在開闊區(qū)域,夢芯T906B接收機(jī)的單頻與雙頻模糊度固定率均達(dá)到了95%以上,u-blox ZED-F9P接收機(jī)雙頻的固定率較單頻提升約16%;在定位精度方面,兩種接收機(jī)均達(dá)到了厘米級,可以認(rèn)為單頻與雙頻結(jié)果無明顯差別。
在半遮擋區(qū)域,模糊度固定方面,夢芯T906B接收機(jī)在半遮擋區(qū)域1和半遮擋區(qū)域2中雙頻較單頻分別提升約24.7%、14.1%,u-blox ZED-F9P接收機(jī)雙頻較單頻分別提升約9.7%、1.4%,在增加固定歷元的同時,雖然浮點(diǎn)解有所減少,但固定解與浮點(diǎn)解歷元總數(shù)有所提升。定位精度方面,夢芯T906B接收機(jī)在半遮擋區(qū)域1中,雙頻較單頻在E、N、U方向上分別提升45.7%、23.1%和6.7%;半遮擋區(qū)域2中,雙頻較單頻分別提升76.5%、74.3%和89.0%。u-blox ZED-F9P接收機(jī)在半遮擋區(qū)域1中,雙頻較單頻在E、N、U方向上分別提升4.4%、9.2%和-18.5%,由于粗差的影響,使得單頻的天向定位結(jié)果反而優(yōu)于雙頻,在半遮擋區(qū)域2中,雙頻較單頻分別提升8.2%、5.0%和16.3%,雙頻天向定位精度較為正常。可以看到,兩種接收機(jī)單頻與雙頻定位精度均為亞米級,總體上雙頻較單頻具有明顯定位優(yōu)勢。
在遮擋區(qū)域,夢芯T906B接收機(jī)單頻僅有約6.9%的固定率,而雙頻仍然能保持19.7%的固定解,u-blox ZED-F9P接收機(jī)單頻僅有約1.6%的固定率,而雙頻仍然能保持一定的固定解,二者固定解與浮點(diǎn)解歷元總數(shù)均占有優(yōu)勢。定位精度方面,此時定位精度為米級,單頻與雙頻的誤差序列都有較大的波動,存在較多粗差,夢芯T906B接收機(jī)雙頻較單頻在E、N、U方向上分別提升20.1%、39.8%和21.6%,u-blox ZED-F9P接收機(jī)雙頻較單頻在E、N、U方向上分別提升5.1%、36.0%和24.5%,因此,兩種接收機(jī)雙頻較單頻都具有較明顯的優(yōu)勢。
綜上所述,在開闊場景下,夢芯T906B與u-blox ZED-F9P單頻與雙頻的模糊度固定率和定位精度基本相同;在半遮擋場景下,兩者雙頻固定率較單頻均有提升,固定歷元與浮點(diǎn)歷元之和也有所增加,夢芯T906B雙頻定位精度較單頻提升較大,u-blox ZED-F9P雙頻定位精度較單頻有一定程度提升;在遮擋場景下,兩者雙頻固定率較單頻提升約10%,雙頻定位精度較單頻提升10%~30%。
4 結(jié)論
本文對低成本雙頻GNSS接收機(jī)夢芯T906B和u-blox ZED-F9P進(jìn)行了城市典型場景下動態(tài)定位精度的測試分析。通過對比兩種接收機(jī)在不同場景下單頻與雙頻的定位結(jié)果,得出如下結(jié)論:
在開闊環(huán)境下,單頻與雙頻模糊度固定率均較高,定位精度均能達(dá)到厘米級,單頻與雙頻定位性能無明顯差別;在半遮擋環(huán)境下,雙頻模糊度固定率和定位精度較單頻均有較大提升;在遮擋環(huán)境下,單頻與雙頻的模糊度固定率均較低,定位精度在幾米到幾十米,結(jié)果都存在較大誤差,但雙頻較單頻仍具有較大優(yōu)勢。綜上所述,在城市典型場景下,低成本雙頻RTK的模糊度固定率和定位精度較單頻均有明顯提升。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52