微耕機振動研究現狀綜述*
2021-10-28 09:00:34劉曉潺張秀麗
南方農機 2021年19期
劉曉潺,田 輝,張秀麗
(河南農業大學機電工程學院,河南 鄭州 450002)
0 前言
近年來,大型農業機械發展迅速,在大田農業生產中發揮了重要作用。但是大型農業機械的購置成本高,作業時間集中,不能適應于煙草、茶葉、藥材等高附加值經濟作物的種植,以及山地、丘陵和溫室大棚耕作,容易造成農業生態失衡和農村動力配置過剩。精準農業和綠色農業發展迅速,根據精準農業的特點,多個小型自動化農業設備比傳統的大型農業設備更低耗、更高效。精準農業的發展對小型智能化農業設備的穩定性、可靠性、智能性和經濟性都提出了更高的要求。小型智能化農業裝備具有廣闊的市場前景,發展小型智能化農業裝備,對于推進精準農業發展進程,發展低耗、高效、高質的精準農業,具有重要意義[1]。
微耕機是典型的小型農業設備,具有體積小、質量輕等特點,廣泛應用于平原、山區、丘陵的旱地、水田、果園、大棚等,能夠協助農戶完成噴藥、噴淋、施肥和耕地等工作[2]。微耕機在工作過程中存在強烈的振動,這種振動會造成操作者手臂發麻、耳鳴、失眠、頭疼、關節痛、白指病、多發性神經炎,甚至高血壓等,嚴重影響操作者的身體健康。此外,由于微耕機的穩定性較差,也影響了微耕機械其他智能功能的研發。因此,研究微耕機的振動機理,提出合理的微耕機動力結構修改措施,對提高微耕機工作過程中的可靠性和穩定性以及高端智能化微耕設備的研發有重要意義[3-4]。
1 微耕機振動研究概述
匈牙利、英國等歐洲國家從20世紀初就開始研制微耕機,并投放市場,而后被日韓等亞洲國家引進[2]。微耕機于1992年被引入我國,隨即得到更大的發展。傳統微耕機主要以柴油機或汽油機為動力源,是手扶式的結構,如圖1(a)所示。隨著技術的發展,輪式自走式和履帶自走式微耕機逐漸出現,分別如圖1(b)、圖1(c)[5]所示,微耕機的操作舒適性得到進一步的提升。隨著自動化技術的發展,具有智能遙控功能的履帶自走式微耕機也逐漸面世,如圖1(d)所示,為實現遠程監控指揮農業耕作提供了支撐。最初,微耕機多以柴油機和汽油機為動力源,隨著能源日益緊缺和綠色農業的發展,環保型的電動微耕機也逐漸出現。微耕機正在向著環保、節能和智能化的方向發展。但是微耕機振動的問題,一直沒有得到很好的解決,這極大地影響了微耕機整體動力性能的提升和智能功能的開發。

圖1 幾種類型的微耕機
國內外學者借助于振動測試實驗、微耕機振動建模與仿真、微耕機整機動力學建模與分析等手段,對微耕機的振動特性和振動抑制措施進行了研究。多工況下的振動測試結果表明,微耕機振動強度受到發動機轉速、耕作深度、耕作行進速度影響較大,微耕機的振動主要是在激振力作用下的強迫振動以及由此引發的局部共振[6-8]。
微耕機受到的激振力主要來源于以下兩個方面:第一,動力系統的激振力,比如發動機氣缸內的著火燃燒脈沖、曲柄連桿機構進行往復運動時由于自身不平衡造成的周期性振動,變速箱和行走箱內部齒輪副間高速運動造成的振動,對于電動微耕機,還包括電機的電磁激振力等[8];第二,旋耕刀切削土壤造成的沖擊載荷,刀輥自身旋轉的慣性力矩引起的周期性振動以及受力不均引起的受迫振動。
2 微耕機振動激振力
2.1 發動機和電動機激振力
目前,認為引起發動機垂直方向的激振力,即單缸發動機運轉時活塞的往復慣性力,可根據式(1)求出[9],即:

其中,mh為活塞質量,R為曲柄半徑,ω為發動機曲軸角速度,λ為連桿徑長比。
電磁激振力隨時間變化為正弦波形,根據電機參數,可以對電磁激振力進行計算,計算公式如式(2)所示[8]:

2.2 土壤對刀輥的反作用力
土壤對刀輥的切削阻力是微耕機振動的一個重要激振力,對于研究微耕機的振動至關重要。刀輥切削土壤過程中,刀片與土壤發生擠壓,刀片與土壤之間的相互作用力和土壤的理化特性以及耕深、刀輥轉速、彎刀結構、機組前進角度密切相關。旋耕刀切削土壤是一個復雜的作用過程。目前大部分研究,將其簡化為一個恒力,計算公式如式(3)所示[10]:

其中,T為刀輥扭矩,P為發動機功率,n為發動機轉速,R為旋耕刀回轉半徑。
但是,在實際工作過程中,土壤對刀輥的切削阻力是一個動態變化的力,將其簡化為一個恒定力,對微耕機的振動特性進行求解,遠遠不足以反映微耕機的動力學特性。因此,許多學者根據有限元的方法對旋耕阻力進行了計算。
土壤切削是農業生產過程中的共性問題,在開溝、深松、培土、挖掘、旋耕等農藝過程中,都存在土壤切削問題。運用有限元分析土壤的特性時,常用的方法有ALE法、拉格朗日法、耦合歐拉-拉格朗日法(CEL法)、光滑質點動力學法(SPH法)等。其中,SPH法不用網格,不存在網格畸變問題,能處理大變形問題,經常被用于土壤切削過程的仿真分析。
孫紅[10]基于SPH法建立了土壤模型,對果園開溝刀具土壤切削過程進行了仿真,模擬了開溝過程中土壤粒子的運動和變形。曹中華等[11]基于SPH法建立了深松鏟土壤切削仿真模型,有效仿真了深松鏟運動過程中土壤的運動、破碎和變形情況,計算了深松過程中的切削力。彭彬[12]采用Drucker-Prager非線性彈塑性模型模擬了旋耕刀具的土壤切削過程,基于SPH算法建立了土壤的有限元模型,得到了土壤和旋耕刀輥的應力分布、切削阻力和功率等。朱留憲等[13]基于有限元方法對微耕機刀輥切削土壤進行了仿真,分析了土壤破碎情況、旋耕刀輥切削力及切削扭矩,如圖2所示。結果表明:淺層土壤擾動位移最大,中層土壤次之,深層土壤最小,分析結果與測試結果一致。
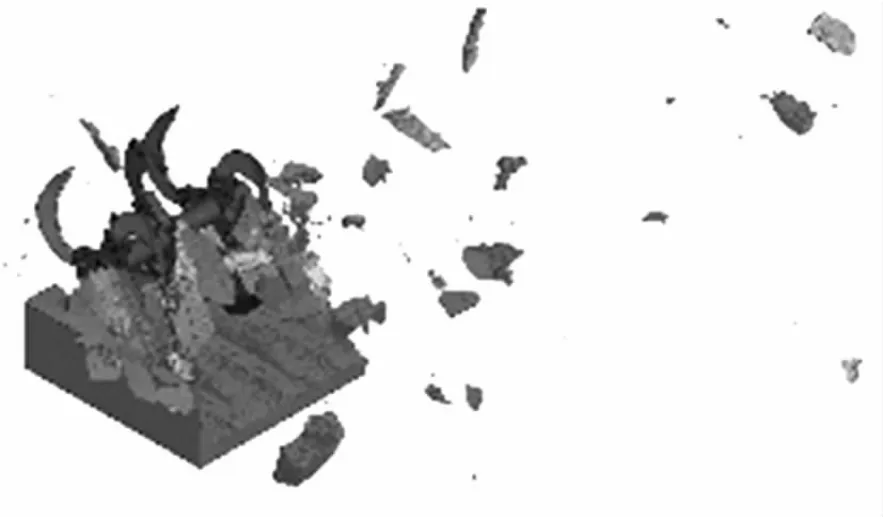
圖2 旋耕刀輥切削有限元仿真模型
3 微耕機振動模型發展
建立微耕機的振動模型是對微耕機振動特性進行分析的基礎。方晶晶等[4]、王炎林[8]、胡陳君[14]針對不同型號微耕機的結構特點,考慮扶手力、刀輥切削力、發動機一階慣性力、土垡撞擊力等,將微耕機的發動機、蓄電池、電動機、支撐架、扶手、刀輥等主要部件等效簡化為集中質量塊,結合試驗以及仿真的辦法,求解部件的剛度,并進行簡化,建立了微耕機的彈簧質量塊模型,如圖3所示。
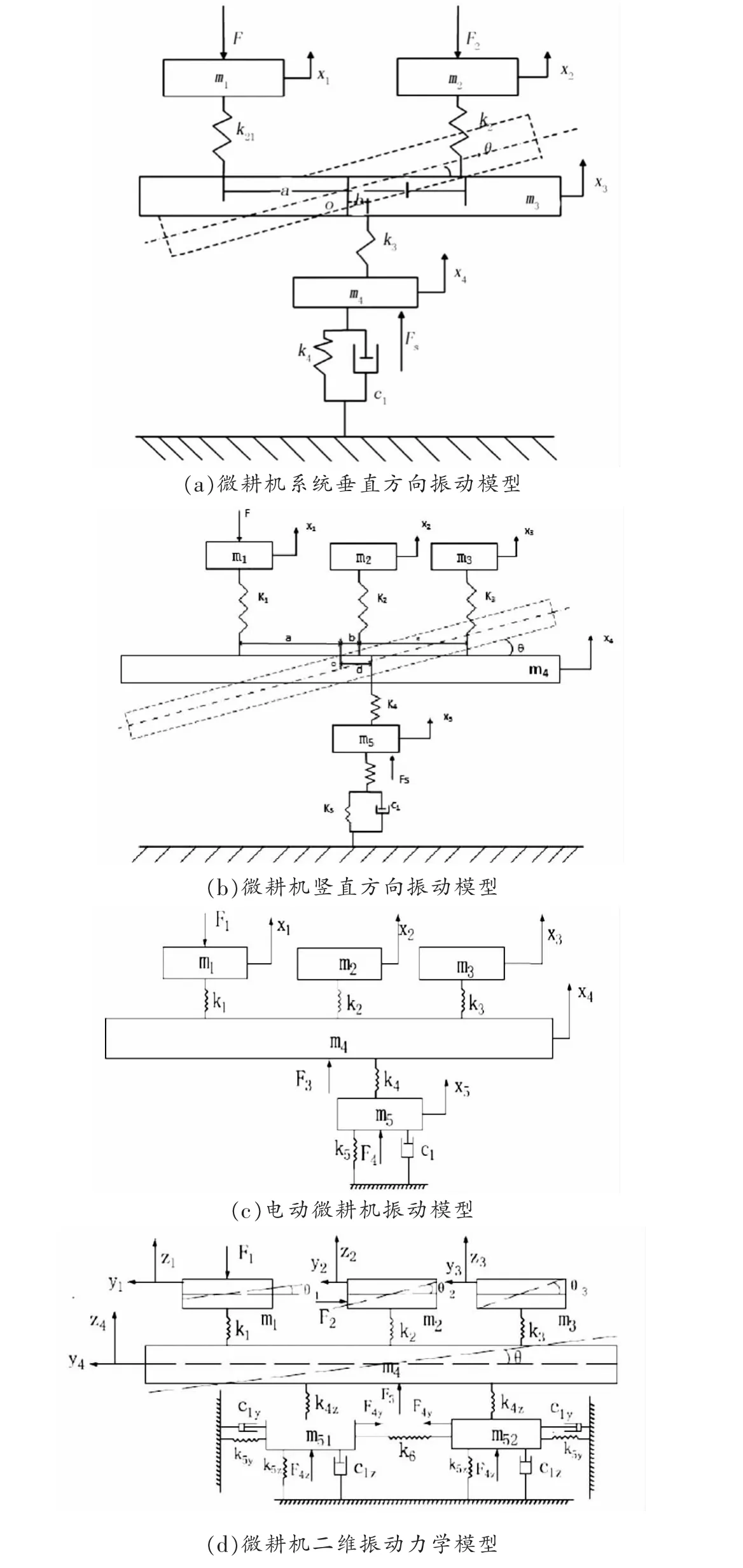
圖3 微耕機振動模型
基于所建立的彈簧質量塊模型,可以對微耕機的時域和頻域特性進行仿真分析,結合振動實驗測試進行對比分析,證明了所建立模型的正確性,解釋了微耕機不同部件的振動特性以及微耕機振動的傳遞路徑,為進一步對微耕機主要結構進行優化奠定了基礎。但是在建立模型的過程中,都將微耕機刀輥切削反力當作一個常量,這將影響微耕機振動特性的分析結果,不能全面揭示微耕機的振動特性,不利于有效振動抑制措施的提出。
4 微耕機模態仿真分析和整機動力學仿真
基于有限元的方法,求解微耕機主要部件的模態和振型,對于揭示微耕機振動特性,對主要部件進行結構動力學修改,減少由激振力引起的微耕機主要部件的局部共振具有重要意義。
任永豪[15]建立了微耕機旋耕刀輥的有限元模型,如圖4所示,求解了旋耕刀輥的自由模態和約束模態,基于LMSTEST-Lab系統測試了刀輥的自由模態,與有限元求解結果對比,驗證了模型的正確性。牛坡[16]、李果等[17]、王卓等[18]、王飆[19]基于有限元對微耕機扶手架進行了模態分析,依據模態分析結果,對扶手架結構進行了優化,如圖5所示。王世猛等[20]根據有限元的方法等對微耕機變速器的模態進行了分析,得到變速器的固有頻率和振型,結果表明,變速器固有頻率高于發動機和旋耕刀輥的激振頻率,不會發生共振。

圖4 微耕機旋耕刀輥振型圖
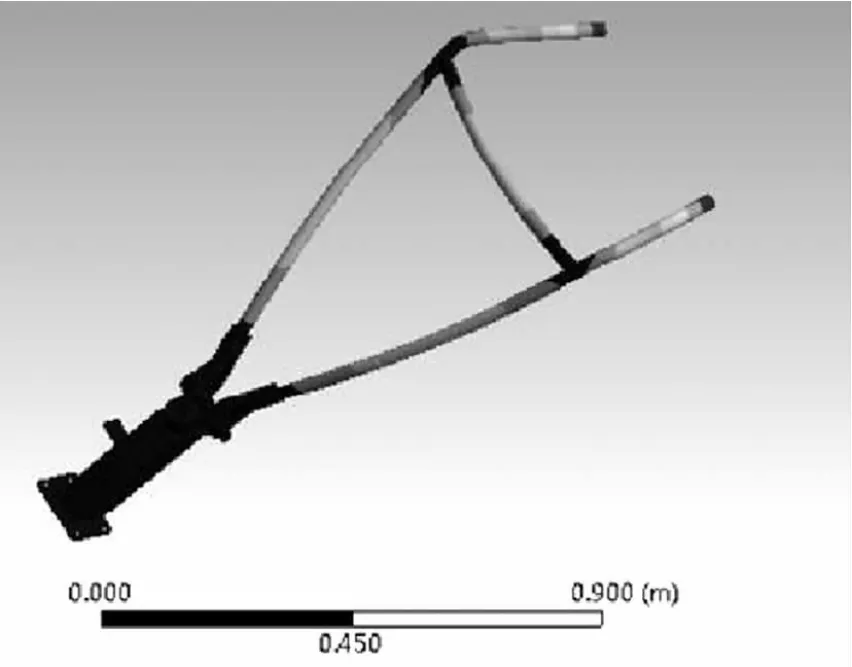
圖5 微耕機扶手架有限元模態分析模型
陳亞潔[21]建立了微耕機整機的剛柔耦合動力學模型,如圖6所示,對整機進行了模態分析,計算得到了整機的前十階模態。然后,分別將微耕機旋耕刀軸與土壤間的隨機激振力以及發動機的一階慣性力作為激勵,對微耕機剛柔耦合動力學模型進行了仿真分析。王飚[19]以重慶地區常見的微耕機為例,采用有限元的手段對微耕機進行了整機模態分析,結果表明影響該型微耕機振動性能的主要因素是刀輥和發動機工作時產生的低頻振動。微耕機的整機動力學分析,為揭示微耕機的振動傳遞路徑,對微耕機進行整機動力學結構優化奠定了基礎。

圖6 自走式微耕機剛柔耦合動力學模型
5 微耕機振動抑制手段
目前,針對微耕機的振動抑制措施,以被控控制為主。比如,改進發動機安裝架,安裝手柄隔振器,定期更換發動機安裝座處的減震墊,采用增強型玻璃纖維塑料作為微耕機的扶手架等,都可以有效減少傳遞到手柄上的振動。例如,孫玉華等[22]根據微耕機的結構和空間尺寸參數,設計了一種變剛度和變阻尼的磁流變彈性體隔振器,安裝在旋耕刀輥軸和發動機動力輸出軸之間,用于隔離受到復雜激勵源的微耕機刀輥的振動。Bini Sam等[23]在手扶式拖拉機扶手上設計安裝了隔振器,有效降低了扶手的振動,降低了扶手架振動對人體健康的危害,減少了扶手振動導致的白指病的發生。
基于微耕機整機及主要部件的有限元模態分析,探究微耕機振動傳遞路徑,優化振動傳遞路徑,通過設置懸架系統,減小發動機在轉速工況范圍內因干擾引起的振動和沖擊,也可以有效降低微耕機的振動。此外,還有部分學者依據人體工程學理論研究了微耕機駕駛員的身體狀況與微耕機振動之間的關系,致力于提高微耕機使用過程中的舒適性,減小微耕機振動對人體造成的危害,延緩和減少振動綜合癥的發生。
6 結論
綜上所述,對微耕機振動的研究方法和內容主要可以分為以下幾個方面:第一,多工況下微耕機的振動測試和信號分析;第二,微耕機彈簧質量塊模型的建立和振動特性仿真分析;第三,基于有限元的微耕機機架和扶手架等關鍵部位的模態分析和結構優化;第四,基于動力學仿真分析的微耕機整機動力學特性和振動特性研究。
對微耕機振動的研究將向著以下幾個方面發展:第一,對微耕機刀具和土壤間的作用力進行精確表征,并將其引入到微耕機振動模型中,對于研究微耕機的振動至關重要;第二,建立機電控制系統和機械結構系統耦合的微耕機振動整機模型,從整機的角度探討微耕機振動發生的原因,并對微耕機控制系統和機械結構進行優化;第三,對操作者和扶手之間的人機工程學特性進行研究,設計合理的隔振器及配套的智能控制系統,提高操作過程中的舒適性,減少白指病的發生率;第四,隨著智能化微耕機的發展,出現了不需要扶手架的履帶自動式微耕機,針對履帶自走式微耕機的結構特點,尤其是履帶的動力學特性,建立履帶式微耕機的振動模型,研究其振動特性,提出合理的振動抑制措施和結構優化方案。
猜你喜歡
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
汽車與新動力(2015年1期)2015-02-27 12:11:01
機械工程師(2015年10期)2015-02-02 01:14:03
計算物理(2014年2期)2014-03-11 17:01:39
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
船海工程(2013年6期)2013-03-11 18:57:27
汽車與新動力(2013年5期)2013-03-11 16:08:17