軌道轉(zhuǎn)移飛行器復(fù)雜環(huán)境下假星干擾與星圖識(shí)別研究
2021-11-17 13:33:30王晉麟呂建強(qiáng)程曉明
航天控制 2021年2期
王晉麟 呂建強(qiáng) 陳 凱 程曉明
1.北京航天自動(dòng)控制研究所,北京 100854 2.西北工業(yè)大學(xué)航天學(xué)院, 西安 710072
0 引言
軌道轉(zhuǎn)移飛行器(OTV)是火箭運(yùn)輸系統(tǒng)的重要組成部分,其主要的工作任務(wù)是在不同軌道之間運(yùn)送有效載荷(衛(wèi)星)[1]。軌道轉(zhuǎn)移飛行器通常需要運(yùn)送有效載荷至較高的軌道,進(jìn)入目標(biāo)軌道后再與有效載荷分離,工作時(shí)間較長(zhǎng)。因此為了確保軌道精度,軌道轉(zhuǎn)移飛行器對(duì)其導(dǎo)航系統(tǒng)的精度及可靠性提出了較高的要求。常用衛(wèi)星導(dǎo)航系統(tǒng)(GNSS)在高軌時(shí)受到一定限制[2-3],而基于星敏感器的天文導(dǎo)航(CNS)在高軌時(shí)仍然能夠提供高精度導(dǎo)航信息,因此引入天文導(dǎo)航系統(tǒng)來提高軌道轉(zhuǎn)移飛行器導(dǎo)航系統(tǒng)精度。
基于大視場(chǎng)星敏感器的CNS具有精度高、誤差不隨時(shí)間積累的優(yōu)點(diǎn),星敏感器最早出現(xiàn)于上世紀(jì)50年代,發(fā)展至今已經(jīng)被廣泛應(yīng)用于航空、航天及航海領(lǐng)域[4]。尤其是在航天領(lǐng)域,航天器運(yùn)行環(huán)境更適合星敏感器工作,因此各類航天器如航天飛機(jī)、衛(wèi)星等多配備CNS用來獲取精確姿態(tài)位置。然而,OTV一般裝有大推力發(fā)動(dòng)機(jī),發(fā)動(dòng)機(jī)工作時(shí)噴射的高亮物質(zhì)被星敏感器拍攝后在星圖中干擾星,即假星,從而造成星圖識(shí)別失敗,影響OTV導(dǎo)航系統(tǒng)精度。
星圖模擬是實(shí)驗(yàn)室環(huán)境下研究星圖識(shí)別的基礎(chǔ),目前星圖模擬主要有2類方法:1)在模擬器上顯示星圖,然后由星敏感器成像,如哈爾濱工業(yè)大學(xué)、中科院光電技術(shù)研究所均有研究成果應(yīng)用于星敏感器的地面試驗(yàn)和地面標(biāo)定[5-6];2)在計(jì)算機(jī)上模擬數(shù)字星圖進(jìn)行星圖識(shí)別,如哈爾濱工業(yè)大學(xué)、長(zhǎng)春光機(jī)所、北京航空航天大學(xué)等均使用此方法模擬不同CCD敏感器成像參數(shù)、成像環(huán)境下的星圖用于星圖識(shí)別等算法的研究[6]。
星圖識(shí)別算法是星敏感器的核心技術(shù)。星圖識(shí)別的研究最早開始于20世紀(jì)70年代,主要應(yīng)用背景是“Apollo”登月任務(wù),使用星跟蹤器確定飛船上激光高度計(jì)激光束指向[7]。星圖識(shí)別算法主要分為兩大類:以三角形識(shí)別算法為代表的子圖同構(gòu)類和以網(wǎng)格算法、神經(jīng)網(wǎng)絡(luò)算法為代表的模式識(shí)別類[8]。
Junkins等[9]先驅(qū)在20世紀(jì)70年代末提出了以星三角形為識(shí)別特征的星圖識(shí)別方法,以三角形的邊長(zhǎng)(角距)為特征進(jìn)行匹配識(shí)別;1993年,Liebe[10]首次報(bào)道了三角形算法用于星敏感器在線自主星圖識(shí)別。但三角形算法運(yùn)算量較大且特征維數(shù)太低,因此識(shí)別速度較慢且抗噪聲能力差。針對(duì)此問題,大量的基于三角形算法的改進(jìn)算法不斷提出:Quine等[11]提出了以靠近星圖中心的恒星為主星結(jié)合主星周圍兩顆亮星構(gòu)造三角形的方法,選用二叉樹搜索法提高了識(shí)別速度;張廣軍等[12]在三角形識(shí)別中引入了驗(yàn)證識(shí)別環(huán)節(jié),有效解決了三角形識(shí)別的冗余問題;樊巧云等[13]以三角形的形心慣性比和最長(zhǎng)邊的角距值為匹配特征量,在搜索特征量時(shí)還采用了散列函數(shù),提高了識(shí)別速度。Mortari等[14]在三角形算法的基礎(chǔ)上開發(fā)了金字塔識(shí)別算法,增加了識(shí)別的可靠性,同時(shí)使用了K-vector搜索技術(shù),提高了匹配速度。
模式識(shí)別作為一種星圖識(shí)別算法也得到很好發(fā)展,其中網(wǎng)格法是一種星圖模式識(shí)別的代表性算法,由Padgett等[15]提出,該方法極大提高了特征維度,且搜索匹配過程簡(jiǎn)單,速度快。但該方法一個(gè)主要的問題在于網(wǎng)格圖像必須要旋轉(zhuǎn)角度一致才能完全匹配。Clouse等[16]采用Bayes檢驗(yàn)作為匹配判據(jù)進(jìn)一步提高了識(shí)別率,但上述旋轉(zhuǎn)匹配的問題并沒有很好解決,且由于仿真星庫的限制,沒有完全模擬星等誤差。Silani等[17]采用更加穩(wěn)定的網(wǎng)格模式生成方法,引入子圖同構(gòu)方法提高了匹配效率。Mengna等[18]引入星等特征,在簡(jiǎn)單網(wǎng)格投影中增加了星點(diǎn)距離因素,對(duì)二值化網(wǎng)格增加了權(quán)重,提高了該方法抗噪性能。但上述改進(jìn)方法均沒有很好解決旋轉(zhuǎn)識(shí)別的問題。在基于神經(jīng)網(wǎng)絡(luò)的星圖識(shí)別算法研究方面:Alveda等[19]提出應(yīng)用神經(jīng)網(wǎng)絡(luò)技術(shù)解決星圖識(shí)別問題;Hong等[20]提出了一種基于模糊神經(jīng)邏輯網(wǎng)絡(luò)(Fuzzy NLN)的自主星圖識(shí)別算法,具有訓(xùn)練速度快、識(shí)別精度高的特點(diǎn);Accardo等[21]對(duì)學(xué)習(xí)向量量化(LVQ)神經(jīng)網(wǎng)絡(luò)在星圖識(shí)別中的應(yīng)用進(jìn)行了研究;李冰等[22]采用卷積神經(jīng)網(wǎng)絡(luò)方法提高了匹配效率,通過改變星圖生成方法擴(kuò)大了樣本覆蓋性,提升了識(shí)別的可靠性。
本文結(jié)合OTV工作環(huán)境,同時(shí)綜合考慮各種星圖識(shí)別算法的優(yōu)缺點(diǎn)及工程應(yīng)用。選用基于K-vector搜索技術(shù)的三角形識(shí)別算法,研究假星數(shù)目和K矢量查找角距閾值ε對(duì)星圖識(shí)別成功率的影響,并結(jié)合慣性數(shù)據(jù)輔助提高假星干擾條件下的星圖識(shí)別成功率。
1 復(fù)雜干擾環(huán)境星圖模擬
星圖模擬是開展星圖識(shí)別研究的前提,即在給定星敏感器姿態(tài)或視軸指向的情況下模擬出其拍攝的星空?qǐng)D像。本文使用計(jì)算機(jī)直接模擬數(shù)字星圖的方式模擬星圖,其基本原理是將導(dǎo)航星庫中的恒星經(jīng)過坐標(biāo)投影變化至CCD像平面坐標(biāo)系上。本文除了常規(guī)星圖模擬外還需要對(duì)復(fù)雜干擾環(huán)境進(jìn)行模擬,所涉及的干擾環(huán)境包括:星云、星團(tuán)和發(fā)動(dòng)機(jī)工作時(shí)噴射的高亮物質(zhì)在CCD平面上形成的假星點(diǎn)。星圖模擬的基本流程如圖1所示,首先,星圖模擬需要模擬真實(shí)恒星點(diǎn)在像平面上的成像,采用坐標(biāo)變換將恒星在天球坐標(biāo)系(i系)下的單位星光矢量轉(zhuǎn)換到星敏感器的像空間坐標(biāo)系下;然后,將星敏感器像空間坐標(biāo)系下的星光矢量轉(zhuǎn)換到CCD像平面坐標(biāo)系下,即透視投影變換;最后,對(duì)生成的數(shù)字星圖添加星敏感器噪聲、背景、圖像運(yùn)動(dòng)模糊及復(fù)雜干擾環(huán)境。

圖1 復(fù)雜干擾環(huán)境的星圖模擬方案
設(shè)星敏感器的姿態(tài)角為(α0,δ0,φ0),其中α0為赤經(jīng),δ0為赤緯,φ0為星敏滾轉(zhuǎn)角。由星敏感器坐標(biāo)系到天球坐標(biāo)系的旋轉(zhuǎn)矩陣M可表示為


(1)

(2)
然后,恒星在感光面上的成像過程可以用透視投影變換來表示。經(jīng)過透視投影,恒星成像點(diǎn)的坐標(biāo)為:
(3)
綜上所述,星敏感器成像模型如下:
(4)
式中:s為不為零的比例因子;(X,Y)為像點(diǎn)位置;f為光學(xué)系統(tǒng)焦距;(u0,v0)為光學(xué)中心(主點(diǎn)坐標(biāo))。
對(duì)于CCD像平面上星點(diǎn)一般采用離焦的形式,使星點(diǎn)占據(jù)多個(gè)像素形成光斑,因此,模擬星點(diǎn)目標(biāo)圖像的灰度可以用二維高斯分布函數(shù)來近似表示:
(5)
其中,星點(diǎn)目標(biāo)占據(jù)的像素可以隨星等變化而變化一般有3×3、5×5、7×7,不同的像素窗口對(duì)應(yīng)的高斯半徑也不同,從而模擬出星的亮度信息。對(duì)于星云、星團(tuán)的模擬一般將其占據(jù)多個(gè)像素來表示,本文將其設(shè)定占據(jù)64個(gè)像素半徑。對(duì)于羽流顆粒造成的假星點(diǎn)可以采用隨機(jī)星點(diǎn)生成的方法來模擬假星點(diǎn),其與真星點(diǎn)占據(jù)相同的像素窗口。此外,還增加了星圖運(yùn)動(dòng)模糊的模擬。
本文根據(jù)以上分析生成了星圖模擬樣張,如圖2所示,模擬星圖光軸指向赤經(jīng)赤緯為:(36.68°,22.87°),其中在x方向上添加了運(yùn)動(dòng)模糊。圖3為模擬的隨機(jī)三顆假星點(diǎn)位置示意圖。

圖2 模擬的干擾環(huán)境下的星圖(反相后)

圖3 隨機(jī)生成的假星點(diǎn)坐標(biāo)星點(diǎn)的質(zhì)心提取
2 假星干擾下的星圖識(shí)別
星圖識(shí)別是星敏感器的核心,是準(zhǔn)確解算飛行器姿態(tài)信息的重要前提,星圖識(shí)別一般包括圖像采集及預(yù)處理、特征提取、匹配識(shí)別等過程。
本文將全天球赤經(jīng)0~360°、赤緯-90°~90°分為15×30共450個(gè)天區(qū)進(jìn)行全天球星圖識(shí)別仿真,每個(gè)天區(qū)為12°×12°,設(shè)置最大識(shí)別星等為6.0等,設(shè)置星敏感器視場(chǎng)角14°×14°。
影響星圖識(shí)別成功率的因素有:天區(qū)內(nèi)符合要求星等的真星數(shù)目、天區(qū)內(nèi)假星的數(shù)量、K矢量查找法的角距閾值ε,該閾值的最小值與星敏感器的單星測(cè)量精度有關(guān)。
假星數(shù)量為零時(shí),隨著ε值的變化,得到仿真結(jié)果如圖4。從仿真結(jié)果可以明顯發(fā)現(xiàn),在不存在假星的情況下,識(shí)別的成功率與K矢量查找法的角距閾值ε大小有關(guān):ε值越大,識(shí)別成功率越高,但ε過大可能會(huì)影響匹配速度,并且在存在假星的情況下,ε值會(huì)影響匹配正確性。

圖4 零顆假星全天球識(shí)別結(jié)果
分別設(shè)置假星數(shù)量1~7顆,統(tǒng)計(jì)仿真結(jié)果如圖5所示。從圖5統(tǒng)計(jì)結(jié)果不難看出,ε值在含有假星干擾的星圖中,對(duì)星圖的識(shí)別成功率起著至關(guān)重要的作用,隨著ε值的增大,識(shí)別成功率逐漸降低;隨著假星數(shù)量的增加,識(shí)別成功率也在逐漸降低。所以在后續(xù)蒙特卡洛仿真過程中,建議選擇ε=5″或者ε=6″進(jìn)行星圖識(shí)別。
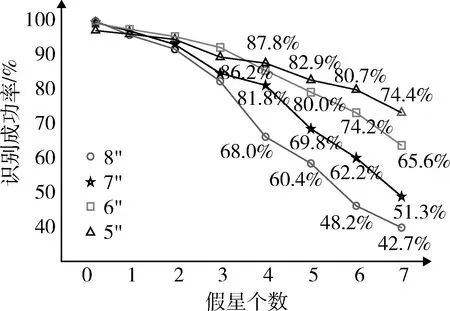
圖5 全天球仿真結(jié)果統(tǒng)計(jì)
為驗(yàn)證全天球仿真中識(shí)別的正確率,分別對(duì)5~7顆 假星時(shí)全天球仿真中的部分天區(qū)進(jìn)行蒙特卡洛仿真實(shí)驗(yàn),分別選擇閾值ε=5″和ε=6″的天區(qū)各20個(gè)左右,分別仿真1000次,仿真結(jié)果統(tǒng)計(jì)如表1所示。

表1 5~7顆假星時(shí)蒙特卡洛仿真結(jié)果
從最終的統(tǒng)計(jì)結(jié)果中可以發(fā)現(xiàn),在存在7顆假星時(shí),最優(yōu)情況下的識(shí)別成功率也達(dá)不到80%,除沒有假星情況下不能識(shí)別的天區(qū),其余天區(qū)識(shí)別失敗的原因均為假星點(diǎn)的干擾引起的,經(jīng)過打印失敗星圖分析,干擾的主要原因是假星點(diǎn)與真星點(diǎn)組成的三角形剛好與星庫中其它天區(qū)三角形匹配成功,導(dǎo)致錯(cuò)誤結(jié)果產(chǎn)生。
3 慣性輔助星圖識(shí)別
通過星圖識(shí)別仿真表明ε較大時(shí)不利于假星的辨識(shí)與剔除,影響成功率,同時(shí)ε過小會(huì)耗費(fèi)大量機(jī)時(shí),不利于在線實(shí)施。因此,有必要在不繼續(xù)減小ε的情況下,尋找一種便捷且不增加硬件成本,且易于工程實(shí)現(xiàn)的方法提高成功率。基于這一原則本文采用了慣性器件數(shù)據(jù)提高假星辨識(shí)成功率,即進(jìn)行首幀匹配時(shí),若航天器的姿態(tài)大致確定,則在首幀匹配完成后增加慣性導(dǎo)航姿態(tài)判定模塊,對(duì)于識(shí)別姿態(tài)與航天器初始姿態(tài)明顯差別較大的匹配結(jié)果,進(jìn)行假星剔除后重新匹配,直到得到在可接受門限范圍內(nèi)的姿態(tài)輸出。流程框圖如圖6所示。

圖6 姿態(tài)輔助星圖識(shí)別流程
下面針對(duì)7顆假星情況進(jìn)行仿真驗(yàn)證,仿真天區(qū)與上節(jié)中的20個(gè)天區(qū)相同,分別做閾值為5″和6″的蒙特卡洛仿真,對(duì)比仿真結(jié)果見表2。

表2 方案對(duì)比
表2中可以發(fā)現(xiàn)使用慣性輔助方案之后,20個(gè)天區(qū)匹配平均成功率高達(dá)99.7%以上,統(tǒng)計(jì)得到的匹配時(shí)間均值在60ms左右。此外,閾值為5″和6″時(shí)匹配結(jié)果基本相同,考慮到閾值越大,可成功匹配的天區(qū)越多,推薦使用6″閾值。
4 結(jié)論
本文利用復(fù)雜環(huán)境星圖模擬技術(shù),進(jìn)行了大量仿真研究,經(jīng)過全天球仿真驗(yàn)證:復(fù)雜環(huán)境下星圖識(shí)別成功率受到假星數(shù)目和K矢量查找法的角距閾值ε的影響,在假星數(shù)目較少時(shí),ε取值適當(dāng)增大有利于提高星圖識(shí)別成功率,而在假星數(shù)目較多時(shí),ε取值較大時(shí),會(huì)將假星識(shí)別為真星,降低星圖識(shí)別成功率。針對(duì)假星顆數(shù)較多識(shí)別成功率低的問題,本文提出了利用慣性輔助識(shí)別干擾星的方法,大幅提高了星圖匹配的成功率,為工程應(yīng)用進(jìn)行了較好的支撐。
