基于阻力加速度指令快速解析與跟蹤的中段制導方法
2021-11-18 07:56:32劉剛王征
航天控制 2021年2期
關鍵詞:指令
劉 剛 王 征
中國運載火箭技術研究院,北京100076
0 引言
升力式飛行器在大氣層內的準平衡滑翔飛行段無動力飛行中的主要制導任務是使飛行器在到達給定的待飛縱程時,將飛行器的高度、速度、航跡方向角等多個參數控制到期望的值,以實現和下一個飛行段的順利銜接。解決中段制導問題常用的方法有預測校正制導[1-5]、阻力加速度剖面規劃與跟蹤制導[6-7]、三維制導[8-9]、基于機械學習的制導方法等。預測校正制導一般先給出攻角剖面,在每個制導周期進行一定次數的在線彈道積分預測以確定傾側角,計算量較大;各種跟蹤制導一般需要先設計參考軌跡或阻力加速度剖面,再對其進行跟蹤。在上述兩大類制導方法中,攻角剖面或參考軌跡的設計是否合理、是否優化,在很大程度上影響著制導性能。本文提出一種基于阻力加速度指令快速解析與跟蹤的制導方法,嘗試通過直接解析的方法實現升力式飛行器的準平衡滑翔飛行段制導任務,擺脫制導方法對攻角剖面或參考軌跡的依賴。
1 中段制導問題概述
假設飛行器已經處于準平衡滑翔飛行狀態,飛行器當前待飛縱程為L0、高度為h0、速度為v0。中段制導問題表述如下:
在每個制導周期給出指令攻角α*和指令傾側角σ*,使得飛行器在中段制導結束時滿足制導終端約束:
L=Lf
h=hf
v=vf
Δχ=|χt-At|≤Δχmax
其中,Lf為終端待飛縱程、hf為終端高度、vf為終端速度,Δχ為航跡方向角偏差,Δχmax為最大允許航跡方向角偏差,χt為飛行器當前的航跡方向角,At為從當前飛行器到目標的大地方位角,χt和At都以指向當地正北為0,以向東偏為正;
同時在飛行中滿足過程約束:
Q≤Qmax
q≤qmax
n≤nmax
Qmax為最大允許熱流、qmax為最大允許動壓,nmax為最大允許過載。
本文的思路是根據牛頓一維質點運動學快速解析得出需要的阻力加速度,加權調節后主要靠攻角進行跟蹤,實現對終端速度的控制;通過縱向比例導引生成過載指令,靠傾側角進行跟蹤,實現對終端高度的控制;對于傾側角設置“阻力加速度跟蹤”和“比例導引”兩種模式,初期先配合攻角輔助跟蹤阻力加速度,滿足一定條件后切換為“比例導引”模式。對于航跡方向角偏差(或待飛橫程)約束通過傾側角按反轉走廊邊界改變正負號實現。
2 制導方法
2.1 阻力加速度剖面快速在線規劃與跟蹤方法

(1)
眾所周知,由牛頓一維質點運動學有:
(2)
為了適應不同飛行任務的要求,可引入一個加權系數kax:
(3)

(4)
阻力加速度指令加權系數kax可根據飛行任務的特點進行設計,加權系數剖面可以采用待飛縱程作為橫坐標,如圖1所示:
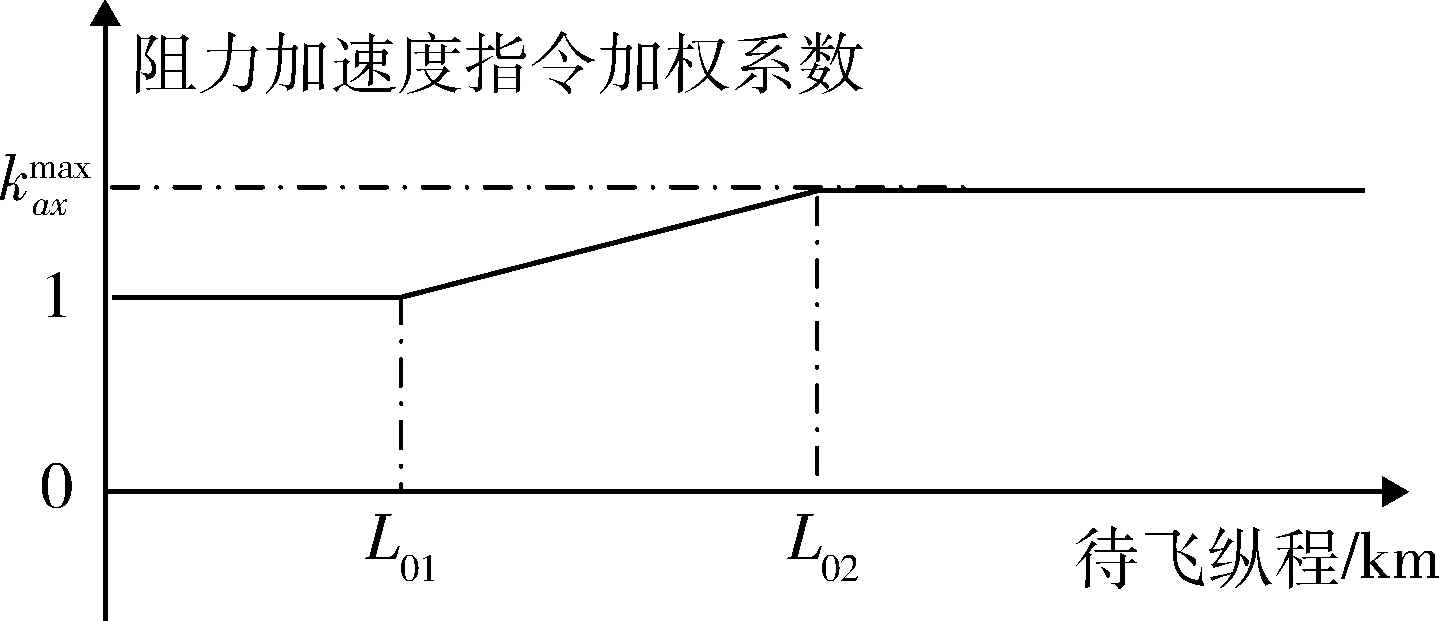
圖1 典型的阻力加速度加權系數剖面

ax=fxcosα-fysinα
(5)
式(5)中fx和fy為飛行器本體系視加速度,對于無動力升力式飛行器僅由氣動力產生,由加速度計直接測量。α為攻角。
由式(5)可見,攻角越大,法向氣動力引起的阻力加速度絕對值越大,由于升力式飛行器的法向氣動力一般大于軸向氣動力(一般為2倍以上),因此可以通過改變指令攻角對阻力加速度指令進行跟蹤。
指令攻角α*(慣性值)以增量形式按下式計算:
(6)
α*=α+Δα*
(7)
其中,α為當前實際攻角(慣性值),kα為增益系數(取較大正值即可)。另外需要根據飛行器姿態控制能力對指令攻角進行限幅和限速。

σ*=σmax1
(8)
σ*為在傾側角的“阻力加速度跟蹤”模式中指令傾側角的大小。σmax1是在傾側角在“阻力加速度跟蹤”模式中的最大允許值。該值對于飛行初期的最大熱流有很大影響,一般設計為小于全程傾側角最大允許值σmax。σmax1過小會影響阻力加速度指令的跟蹤效果,因此需要根據具體任務折中考慮。
進入傾側角的“阻力加速度跟蹤”模式的判據可按式(9):

(9)
退出傾側角的“阻力加速度跟蹤”模式的判據可按式(10):

(10)
按式(9)的判據,傾側角的“阻力加速度跟蹤”模式一般只會在飛行初期被觸發一次。按式(10)的判據,退出該模式后一般不會再次觸發。退出該模式后,傾側角將按下節的方法用于縱向比例導引,不再用于跟蹤阻力加速度指令。
2.2 縱向比例導引方法
比例導引的原理是使彈道傾角的變化率與飛行器與期望終端位置的視線角速度成比例,具有精度高、所需過載小等優點,目前暫未見有文獻將之用于準平衡滑翔段制導。本文嘗試將此用于準平衡滑翔段縱向制導,采用比例導引給出縱向過載指令。應用時,應注意2點:1)由于飛行器與期望終端位置的距離可達數千公里量級,視線被地平線遮擋,在計算視線角和視線角速度時應忽略地球曲率;2)必須考慮離心力的影響。僅在縱向應用比例導引,相關參數按式(11)~(14)計算,推導從略。
(11)
(12)
(13)
(14)

當前飛行器在氣流系的法向過載為:
(15)
用傾側角將其按需求分配到航跡坐標系,指令傾側角的大小按下式計算:

(16)


(17)
同樣,需要根據飛行器姿態控制能力對指令傾側角進行限幅和限速。
2.3 傾側角符號的確定
前文的方法給出的攻角指令(含正負號)和傾側角指令(僅絕對值),用于控制速度和高度。在2.2節中,由于飛行器多余的升力被傾側角分配到側向,影響了飛行器的側向運動。為了控制航跡方向角偏差Δχ(或待飛橫程H),采用與預測校正制導類似的方法,設計一個傾側角反轉走廊,當飛行器側向運動超出走廊邊界時通過改變傾側角的符號進行橫向控制。典型的傾側角翻轉走廊如圖2所示。
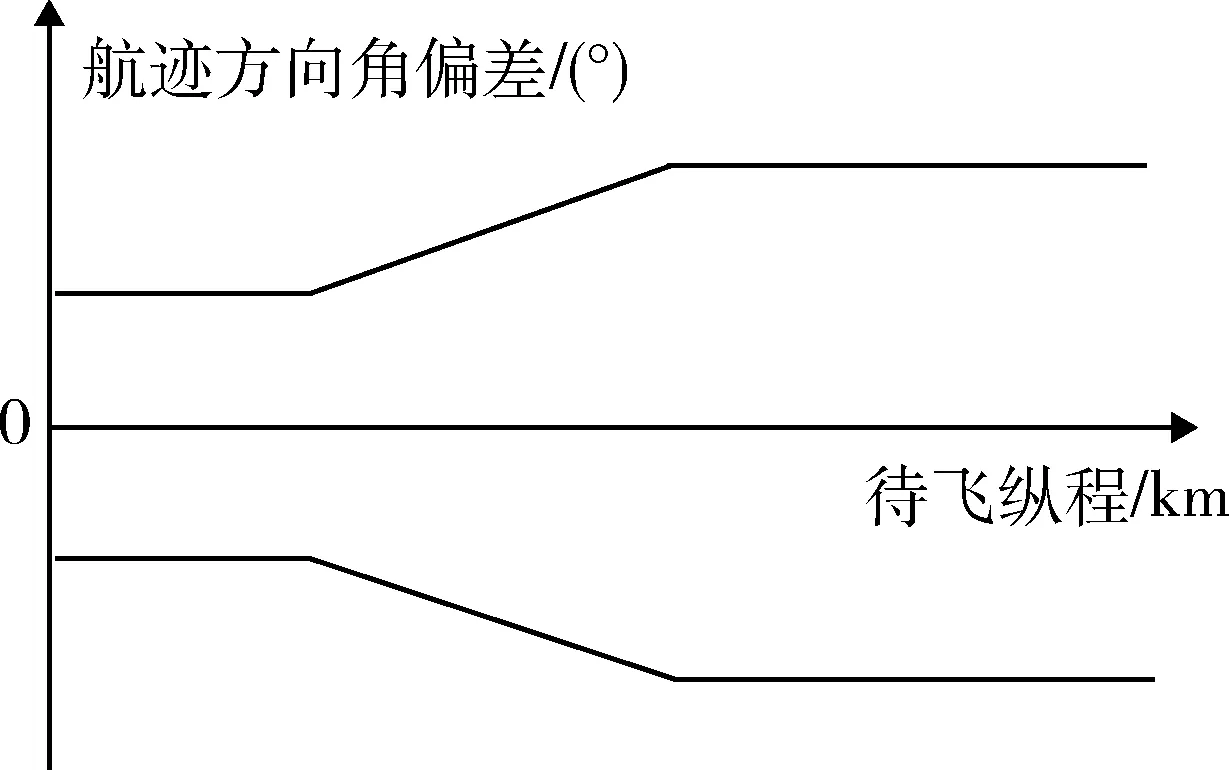
圖2 傾側角反轉走廊示意圖
指令傾側角的符號signσ初始值為:
當Δχ≥0時,signσ=-1
當Δχ<0時,signσ=1
(18)
后續傾側角反轉觸發邏輯為:
若當前signσ=-1且Δχ≤-Δχmax時,觸發正向反轉;若當前signσ=1且Δχ≥Δχmax時,觸發負向反轉。Δχmax為按圖2計算的傾側角反轉走廊邊界。
2.4 過程約束的實現途徑
2.5 制導方法流程
綜上所述,制導方法流程如下:
(a)給出初始攻角、傾側角取值,傾側角制導模式置為“阻力加速度跟蹤”;
(b)開始制導周期;
(c)由式(4)計算阻力加速度指令;
(d)由式(5)計算當前實際阻力加速度;
(e)由式(6~7)計算增量形式的攻角指令;
(f)若當前側角制導模式為“阻力加速度跟蹤”且滿足式(10),則側角制導模式置為“比例導引”;若當前側角制導模式為“比例導引”且滿足式(9),則傾側角制導模式置“阻力加速度跟蹤”;
(g)若當前側角制導模式為“阻力加速度跟蹤”,則由式(8)直接得到傾側角指令,然后轉到(k);若當前傾側角制導模式為“比例導引”,則下一步;
(h)由式(14)計算航跡坐標系期望法向過載指令
(i)由式(15)計算氣流系實際法向過載;
(j)由式(16~17)計算傾側角指令;
(k)由航向走廊確定傾側角正負號;
(l)若到達終端縱程,則制導任務結束;否則轉到(b)。
注:目前仿真算例中暫未出現(f)中從“比例導引”轉為“阻力加速度跟蹤”的模態切換情況。
3 仿真校驗
3.1 模型參數
采用文獻[6,10]中的飛行器參數,飛行器質量為1000kg,參考面積3.5m2,升力系數和阻力系數按下式計算:
CL=0.01sign(α-1°)|α-1°|1.25
(19)
CD=0.01828+1.1CL2
(20)
攻角允許范圍是10°<α<40°,攻角變化速度小于5(°)/s;傾側角允許范圍是|σ|<90°,傾側角反轉速度小于15(°)/s。
表1中λ為經度,φ為大地緯度。終端條件為距離目標點(經度27.85°,緯度0°)的待飛縱程為100km。對于終端坐標無具體要求。僅有終端速度、高度、航向角偏差要求。過程約束為過載小于5g,熱流小于2500kW/s2,動壓小于15000Pa。
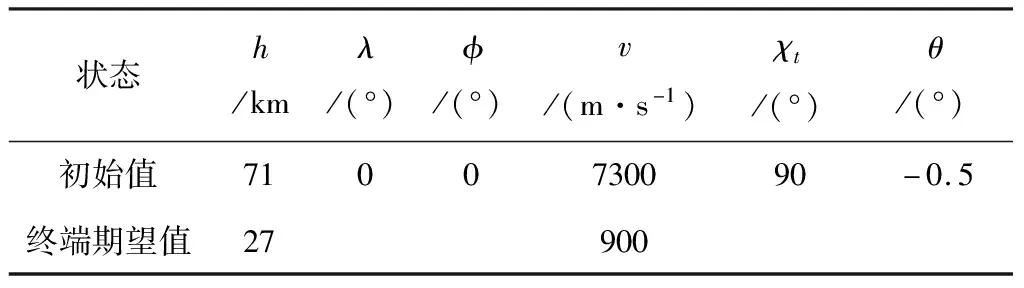
表1 任務初始和終端參數
3.2 約束條件敏感因素分析
1)最大熱流的敏感因素分析
考察傾側角在“阻力加速度跟蹤”模式中的最大允許值σmax1對最大熱流的影響。分別將σmax1取為70°、80°和90°,其余仿真條件都相同,仿真結果見圖3。
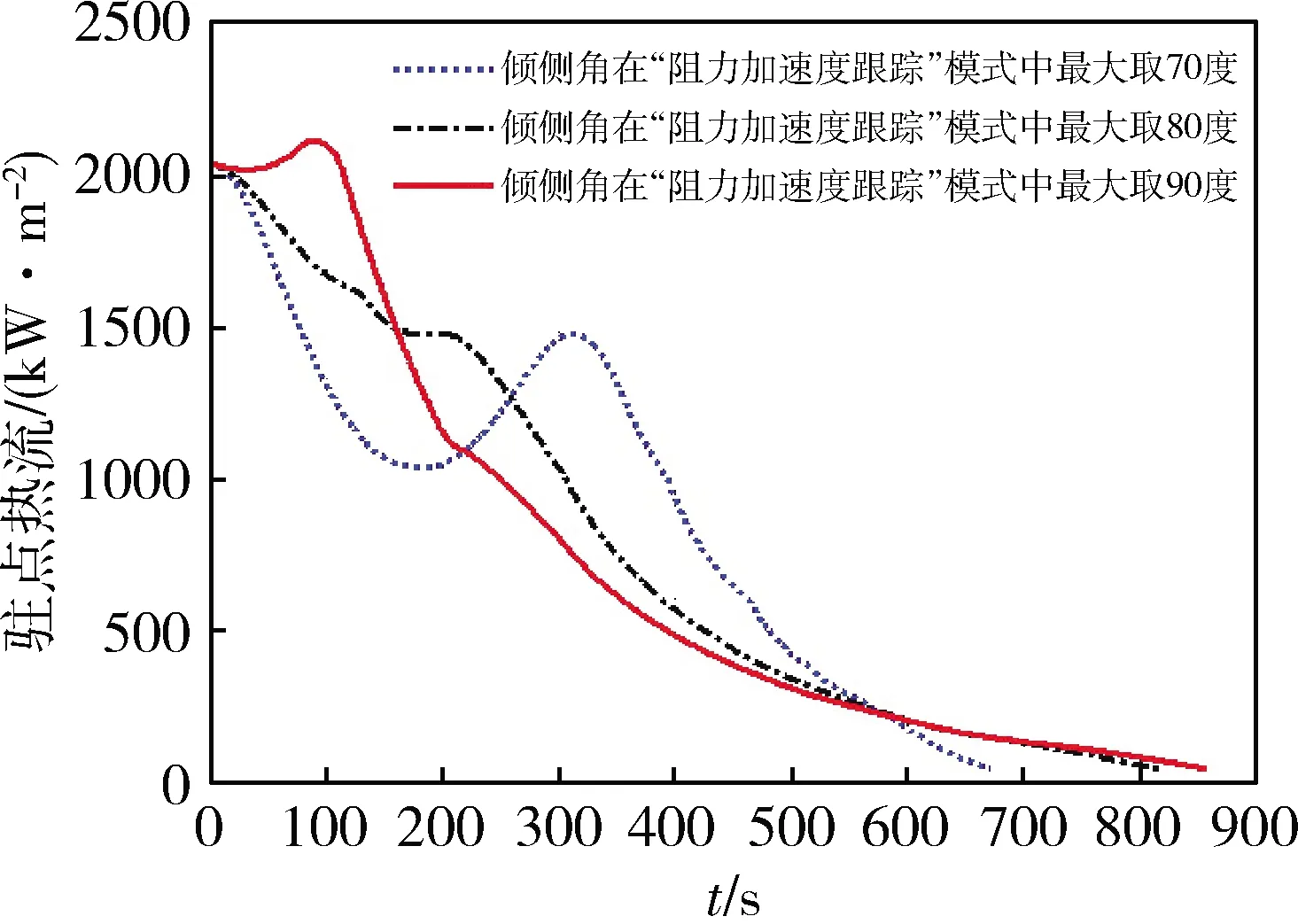
圖3 σmax1對最大駐點熱流的影響
由圖(3)可見,σmax1越大,最大駐點熱流越大。因此需要合理選取σmax1,不宜過大。
2)最大動壓的敏感因素分析
考察阻力加速度加權系數剖面對動壓的影響。在圖(1)所示的剖面中,分別取參數設置見表2。
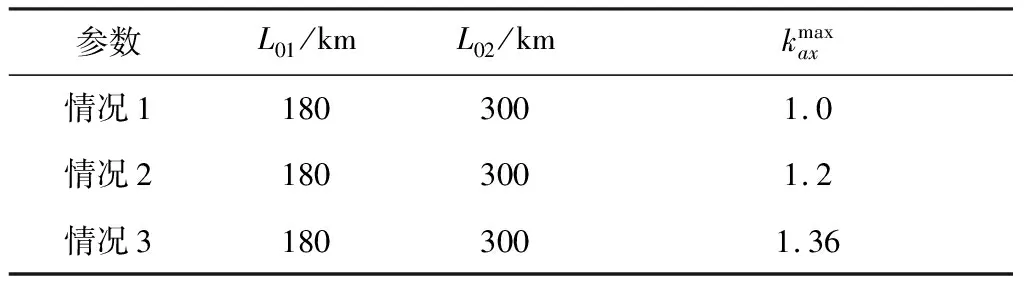
表2 阻力加速度加權系數剖面設計

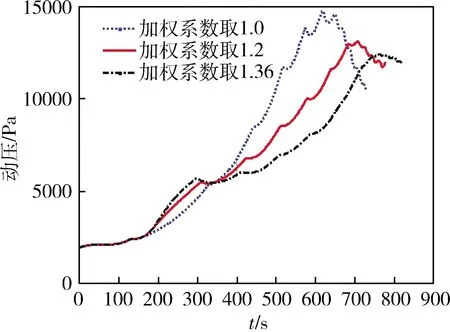
圖4 阻力加速度加權系數對動壓的影響
3.3 標稱狀態下仿真
基于前述分析,為了滿足動壓和熱流約束要求,將kax1取1.36,σmax1取80°,將比例導引系數kD取6。傾側角反轉走廊設計如圖5。
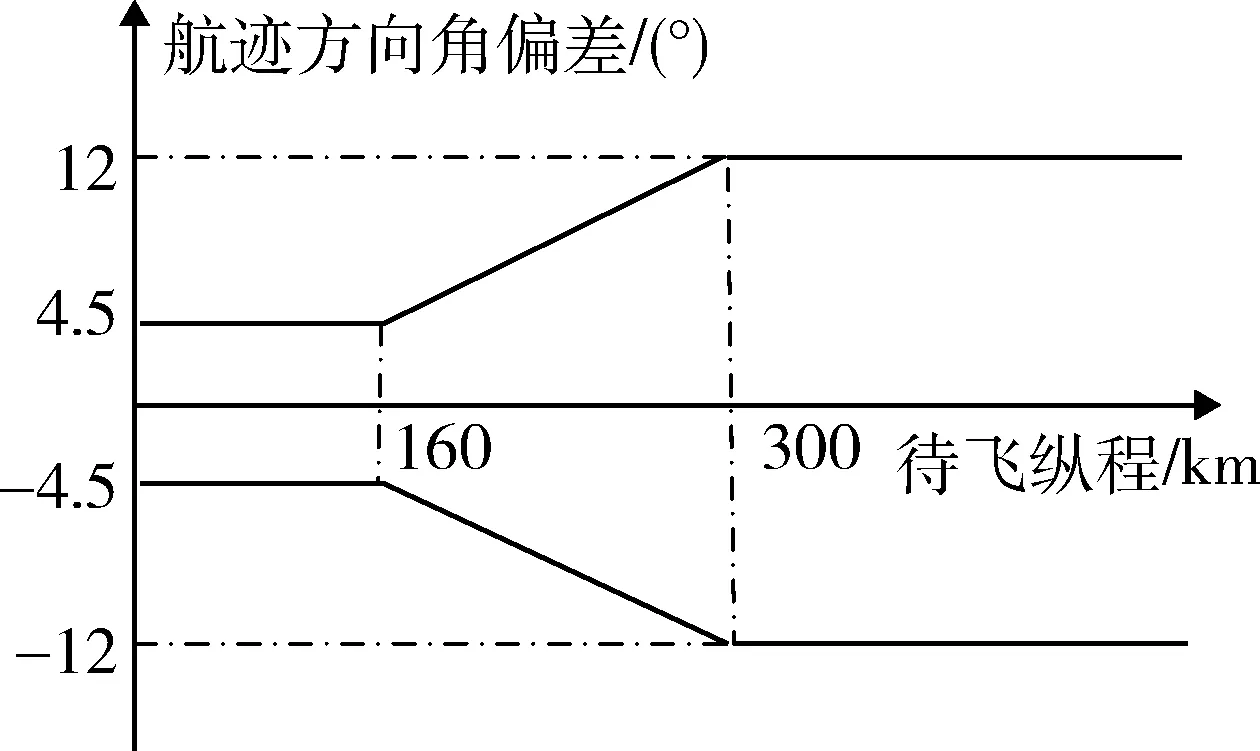
圖5 傾側角反轉走廊
在標稱狀態下進行仿真,在距離目標點(經度27.85°,緯度0°)的待飛縱程小于或等于100km時仿真結束。仿真曲線見如圖6~16所示。
圖6 速度曲線
從圖9~10可見,約200s前傾側角處于“阻力加速度跟蹤”模式,并且期間有一次反轉。此后傾側角轉入“比例導引”模式,由圖14可見,此期間實際阻力加速度與指令值曲線基本重合;由圖15可見,航跡坐標系法向過載指令全程為正值,因此不需要采用大于90°的傾側角進行跟蹤,除了在傾側角的“阻力加速度跟蹤”模式和傾側角反轉過程中,其余飛行段航跡坐標系的實際法向過載與指令值曲線基本重合。說明由解析給出的阻力加速度指令和航跡坐標系法向過載指令,在大部分飛行時間內,尤其是后期,能通過攻角和傾側角得到有效跟蹤。在飛行最末的十分之幾秒時間,由比例導引末端效應引起的加速度不能跟上指令,對制導精度的影響很小。由圖6可見,飛行器速度變化比較均勻;由圖7~8可見,飛行過程無跳躍;由圖9~10可見,攻角和傾側角指令比較平滑、無突變;由圖11~12、13所示,動壓、熱流、過載約束均滿足要求。
圖7 高度曲線
圖8 彈道傾角曲線
圖9 攻角曲線

圖10 傾側角曲線
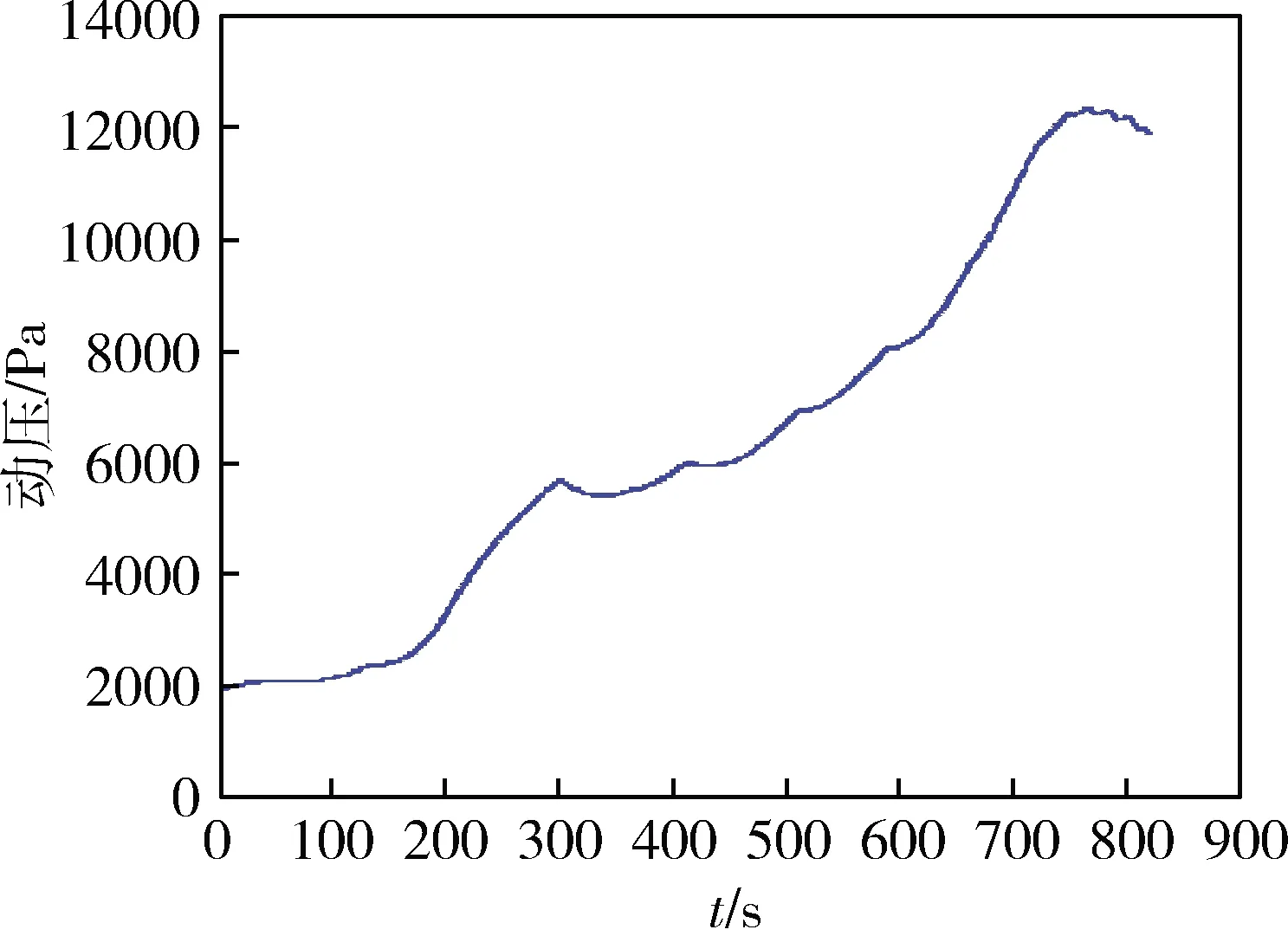
圖11 動壓曲線
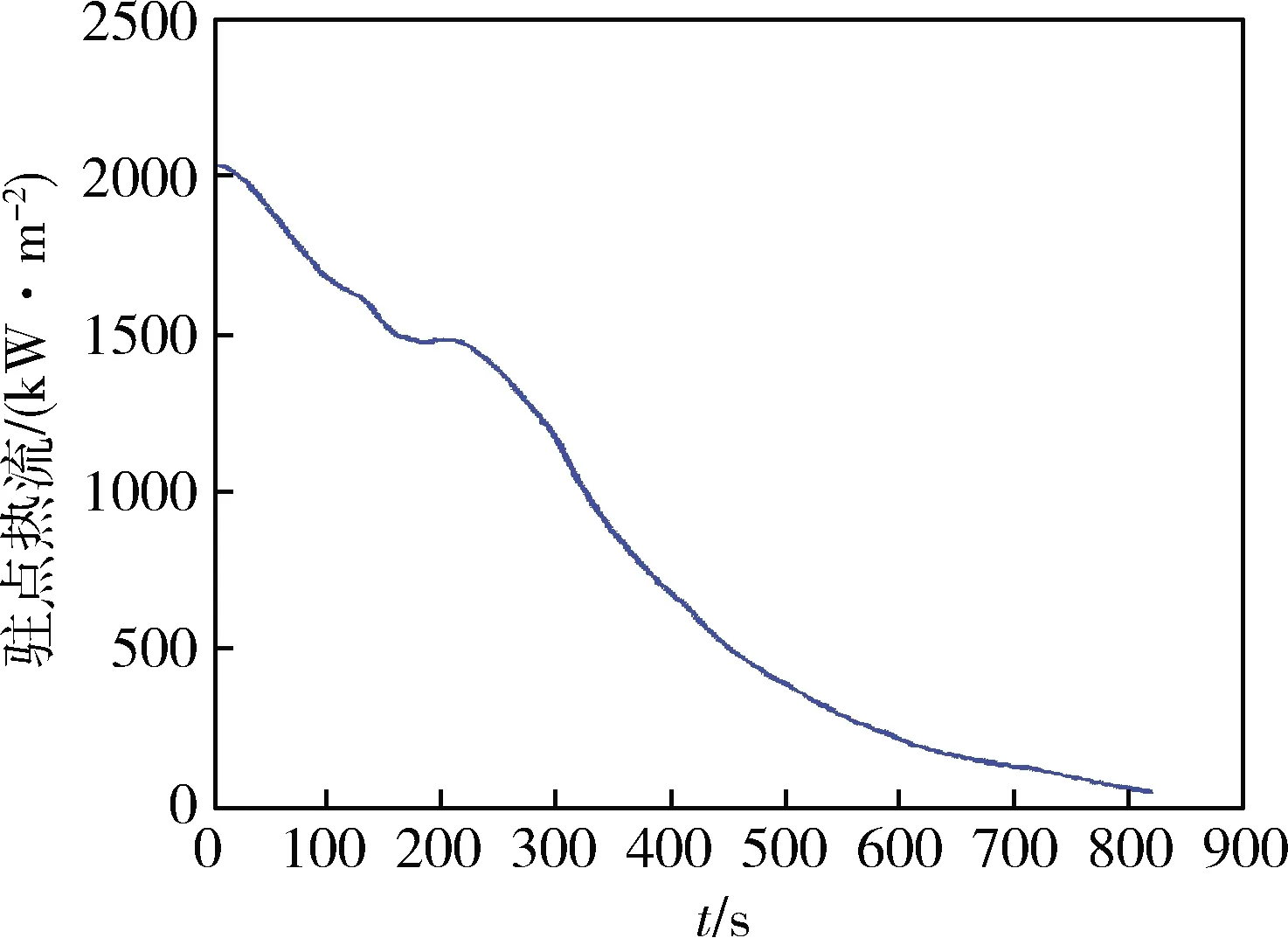
圖12 熱流曲線
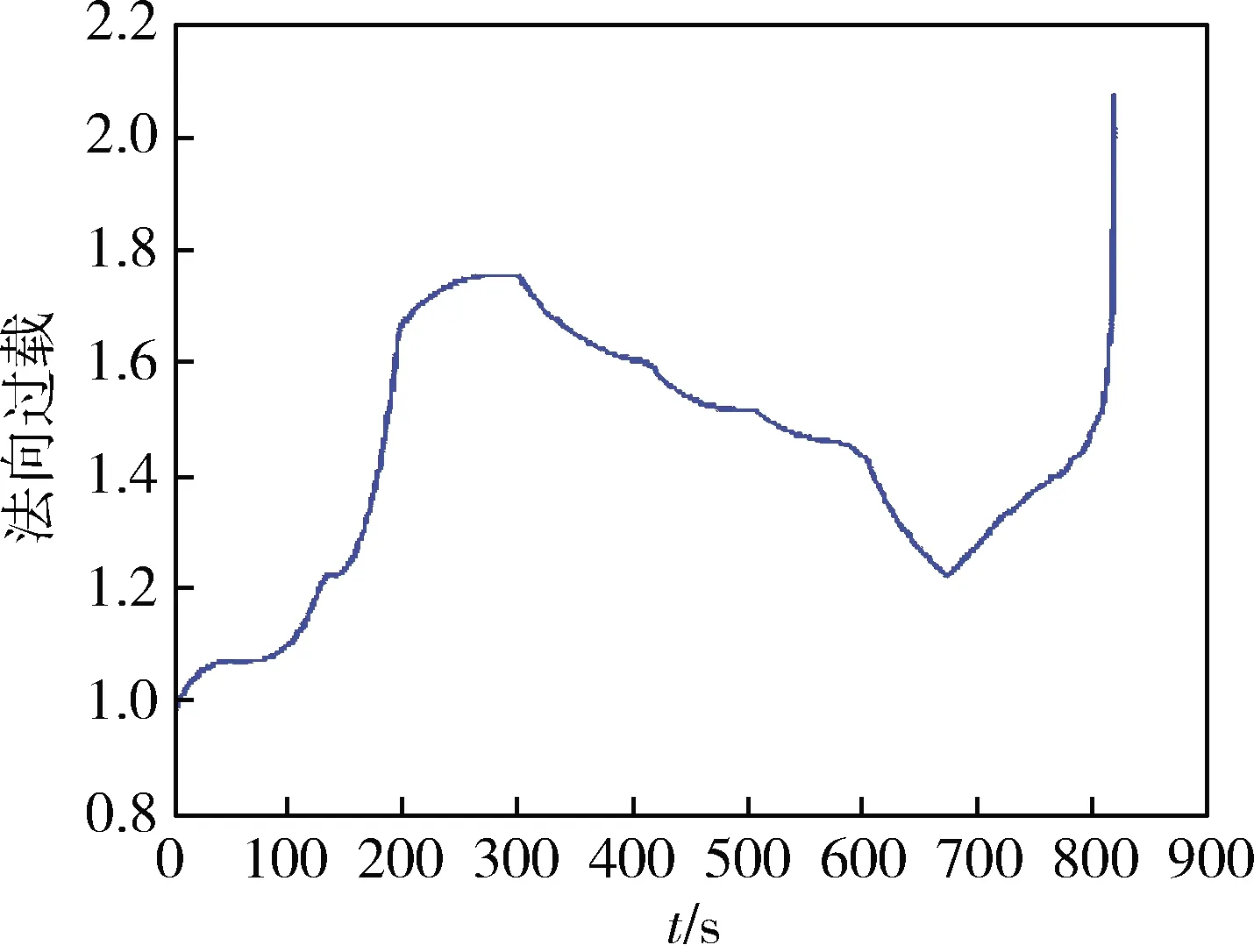
圖13 法向總過載曲線
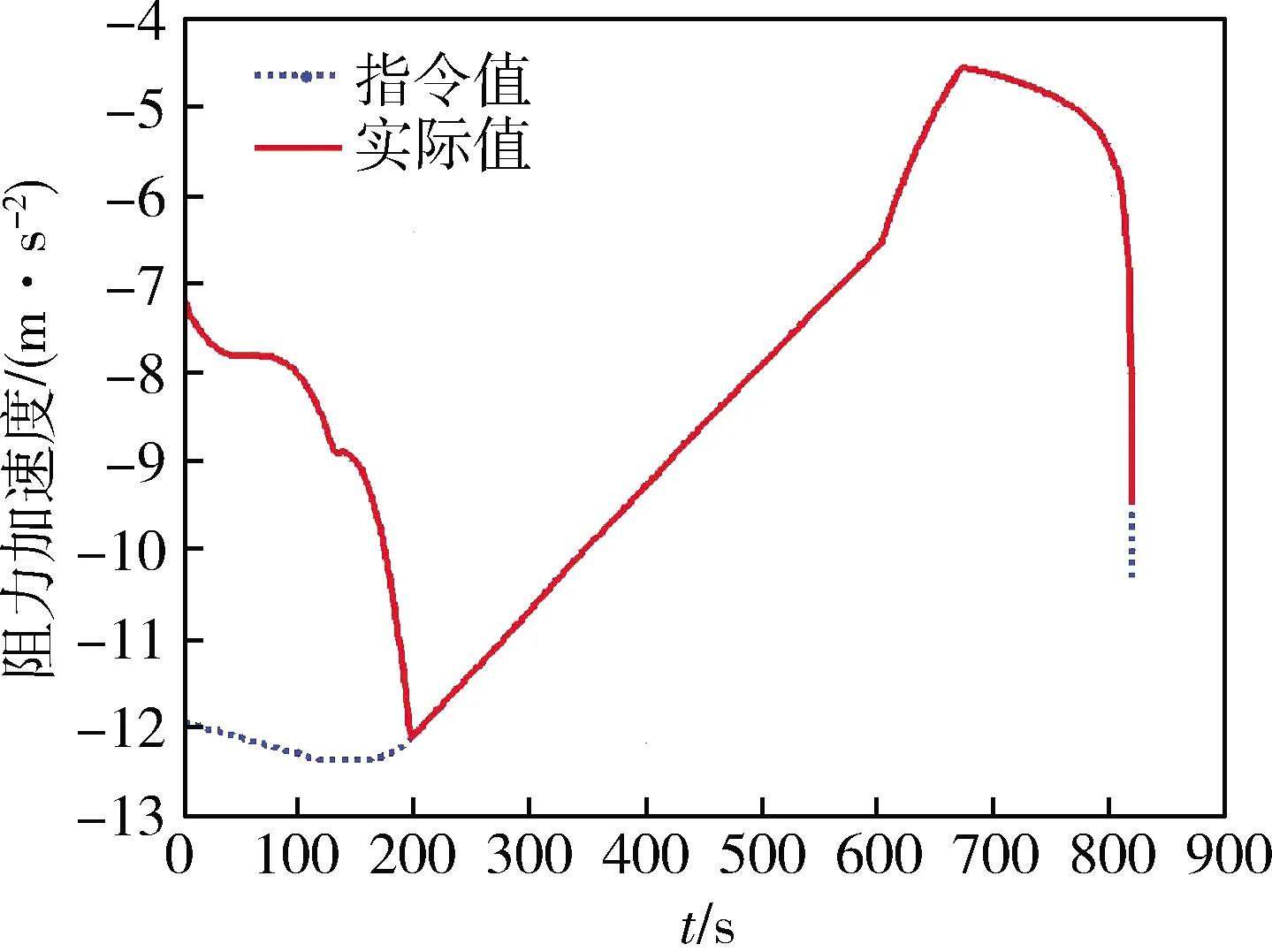
圖14 阻力加速度曲線
圖15 法向過載(航跡坐標系)曲線
圖16 地面軌跡圖
3.4 蒙特卡洛仿真
為了驗證本方法對于不確定性的適應能力并評估控制精度,采用蒙特卡羅打靶方法進行仿真,選取的打靶仿真偏差項同文獻[6],如表3所示。
表3 蒙特卡羅仿真偏差項
此外還按高度施加了高空風場,最大東西向風速為30~60米,最大南北向風速為10~30米,隨高度增加風速逐漸增大。仿真過程中上述誤差在取值范圍內隨機選取。
蒙特卡羅打靶2000次,終端參數散布圖見圖(17)至圖(24)。
圖17 終端速度散布

圖18 終端高度散布

圖19 終端待飛縱程散布
圖20 終端彈道傾角散布圖
圖21 終端航向角偏差散布圖
圖22 最大動壓散布圖
圖23 最大熱流散布圖
圖24 最大法向過載(本體系)散布圖
終端控制精度與文獻[6]對比見表4。
表4 終端參數控制精度對比
可見,采用本方法,對終端速度的控制誤差小于5m/s,對終端高度的控制誤差小于500m,控制精度高于文獻[6]。對終端航跡方向角偏差的控制精度與對比文獻[6]相當。最大動壓、最大熱流、最大熱載均滿足約束要求。在接近終端縱程的最后飛行段,若不發生傾側角反轉,則終端高度和速度的控制精度很高;若正好在傾側角反轉的過程中到達終端縱程,則終端高度控制精度稍差。相比于終端高度和終端速度,本方法的終端航跡方向角控制偏差較大,這是由基于航向走廊的航跡方向角控制策略的局限性引起。
4 結論
提出一種基于阻力加速度指令快速解析與跟蹤的制導方法。通過解析法直接給出阻力加速度指令和航跡坐標系法向過載指令,靠攻角和傾側角進行跟蹤。其創新點一是采用了一種以攻角為主、傾側角為輔的阻力加速度實時解析指令跟蹤模式,實現終端速度的高精度控制;二是將比例導引用于中段飛行,實現對終端高度的較高精度控制。其優點是不用事先規劃攻角剖面,可充分發揮攻角在制導中的作用,提高終端精度,算法設計較容易實現,且計算量小。通過合理設計阻力加速度指令加權系數剖面,該算法對于需要在短時間內減速的中段飛行任務或長時間、長橫程的中段飛行任務都具有很好的適應性。但是,同樣也是因為該算法不采用固定的攻角剖面,在給定的馬赫數和高度下,攻角指令可能出現的取值范圍較大,因此該算法對飛行器的姿態控制能力提出了較高的需求。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
