基于并行測試技術的地面測控系統自檢方法
2021-11-17 13:33:34梁海波董世茂
航天控制 2021年2期
梁海波 姜 蘋 王 尚 李 浩 董世茂 李 巖
1.北京航天自動控制研究所,北京 100854 2.宇航智能控制技術國家級重點實驗室,北京 100854
0 引言
隨著空基導彈武器在實戰中的需求日益多樣化,導彈武器的類型、型號越來越多。為了確保空基導彈武器持續的戰斗力,地面測控系統已成為導彈系統開發方和用戶對其進行測試、維護的主要工具。在此背景下,用戶對快速測試的需求越來越強烈,對地面測控系統的設計及測試方法也提出了更高的要求[1-2]。
目前,作為地面測控系統快速測試技術研究的重要分支,地面測控系統的自檢測試多采用接口等效器法,即設計一個能夠模擬導彈飛行控制系統電氣接口特性的等效器,使用該等效器配合地面測控系統執行流程測試,實現對地面測控系統接口的全面自檢。文獻[3]提及了一種基于上、下位機的等效器設計方案:下位機采用實時操作系統,或高性能的嵌入式設備完成采樣及指令輸出,以滿足實時性要求;上位機采用商用操作系統,完成測試流程的選擇與啟停控制、數據顯示、存儲、檢索等功能。文獻[4]實現了一體化等效器設計方案,利用嵌入式計算機及配套軟件執行較為復雜的測試流程,以期獲得全面的測試結果。上述文獻中的設計方案均能夠滿足地面測控系統的接口測試需求,但測試過程往往基于流程化的串行測試技術,測試耗時相對較長。
因此,為了提高地面測控系統自檢測試的效率,同時進一步挖掘現有地面測控系統設備的潛力,本文不再設計獨立的接口等效器,而是將系統中已有的故障診斷計算機進行功能復用。利用自檢回環測試電纜,將所有接口信號引入故障診斷計算機中,在對被測信號進行整理、歸類的基礎上,有針對性地設計相應的自檢測試方法,并將并行測試技術引入自檢測試軟件的設計過程中,開展并行測試流程設計,達到縮短測試時間、實現地面測控系統高效自檢測試的目的。
1 總體方案
地面測控系統的組成及自檢原理框圖如圖1所示。地面測控系統由中心控制計算機、故障診斷計算機,以太網交換機、30V直流電源、160V直流電源(相同技術狀態,共4臺)、以及信號轉接棘爪電纜組成。地面測控系統各設備均通過以太網交換機實現互聯互通。中心控制計算機作為地面測控系統的指令控制中心,通過以太網向地面測控系統內各設備發送控制指令,通過1553B總線向飛行控制系統發送控制指令,并向飛行控制系統發出時間同步脈沖信號、以及有源和無源開關量信號。故障診斷計算機將來自飛行控制系統及地面測控系統的信息進行匯總、分析、診斷,并出具測試報告。30V直流電源對外提供3路獨立的直流供電輸出,其中,1路為中心控制計算機輸出的有源開關量供電,其余2路為飛行控制系統供電。4臺160V直流電源為飛行控制系統供電。
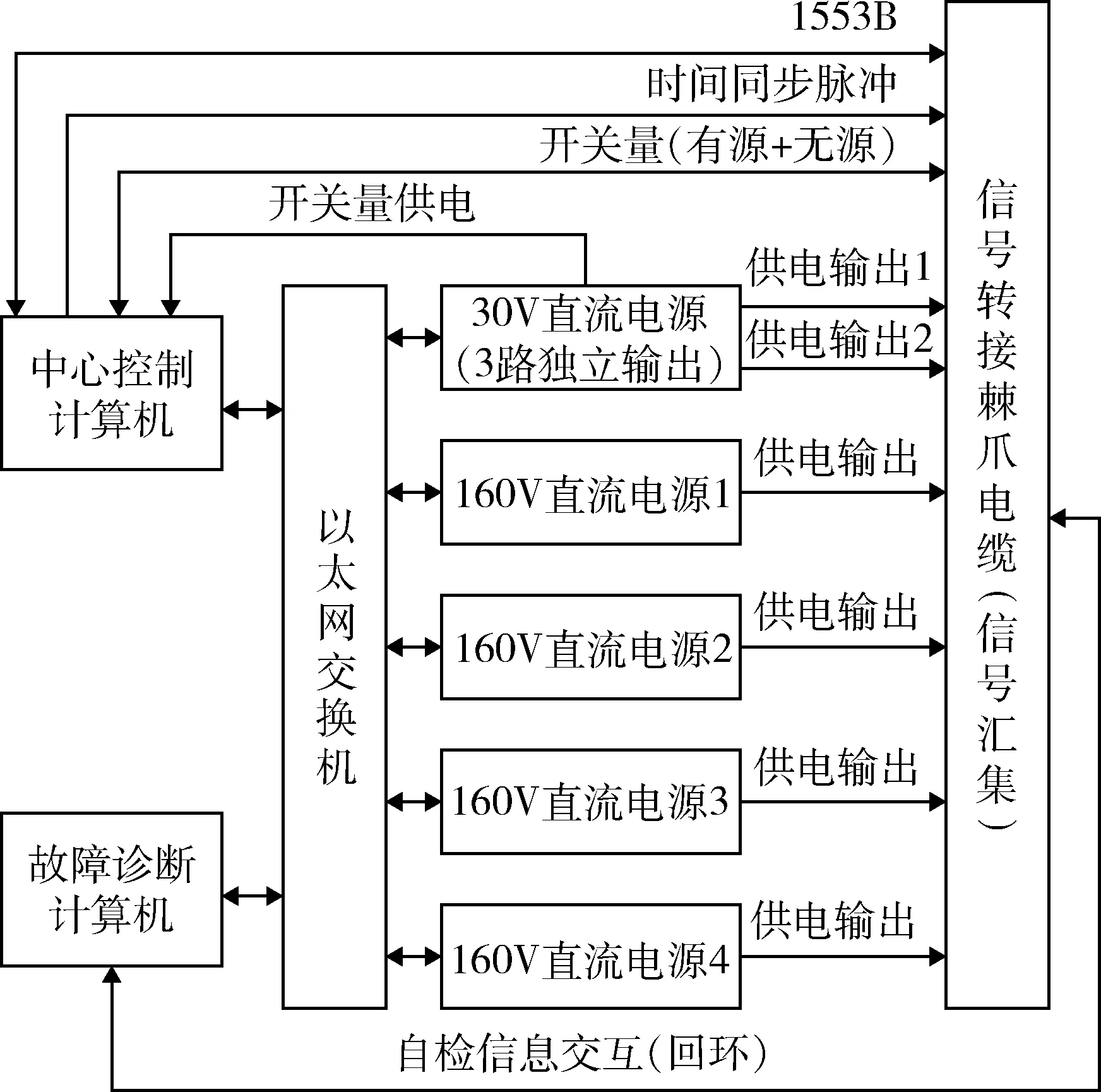
圖1 地面測控系統組成及自檢原理框圖
在對地面測控系統實施自檢測試時,將故障診斷計算機的功能進行復用,作為地面測控系統自檢的核心設備,模擬飛行控制系統,測試、判讀來自地面測控系統的所有接口信號。
對地面測控系統與飛行控制系統之間的接口信號進行梳理、分類,劃分為開關量信號、直流供電信號、時間同步脈沖信號、1553B總線共4類,詳見表1所示。利用專門設計的信號轉接棘爪電纜,將被測信號匯集、回環連接至故障診斷計算機中,再由故障診斷計算機利用自身的板卡資源測試表1中所有的接口信號。具體測試方案如下:
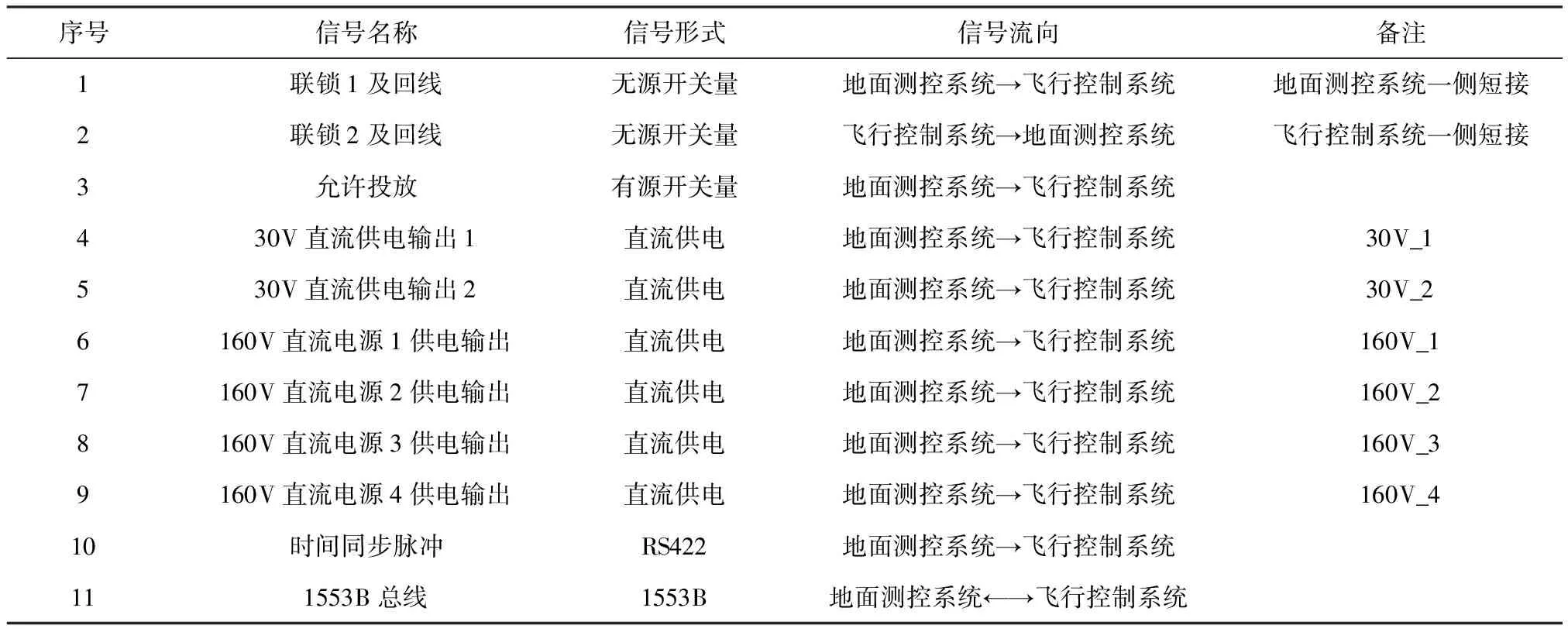
表1 自檢接口信號匯總表
1)對于開關量信號,采用故障診斷計算機內部的開關量輸入/輸出板,對開關量的接通/斷開狀態進行測試;
2)對于直流供電信號,利用故障診斷計算機內部的模擬量采集電路實施電壓采樣,并判讀電壓值;
3)對于時間同步脈沖信號,通過故障診斷計算機內部的RS422接口板卡測試脈沖寬度、占空比等信息;
4)對于1553B總線,故障診斷計算機將自身總線站點初始化為RT,模擬飛行控制系統,完成與中心控制計算機BC的總線數據交互,實現總線通路檢查。
將上述4類信號設計為4個測試項目,基于并行測試技術合理編排測試流程,實現地面測控系統的快速自檢。
下面,將按照接口信號的不同類型,有針對性地開展自檢測試方法設計。
2 自檢方法設計
2.1 開關量信號自檢
地面測控系統對外接口開關量信號包括聯鎖1、聯鎖2及允許投放,其中,聯鎖1和聯鎖2為無源開關量信號,允許投放為有源開關量信號。上述3個開關量信號均由中心控制計算機內部的開關量輸出板、開關量輸入板進行輸出控制或讀取。具體自檢方法設計如下:
(1)聯鎖1
聯鎖1信號用來表征地面測控系統與飛行控制系統之間電連接器的連接狀態,為地面測控系統一側短接的無源開關量信號,由中心控制計算機內部開關量輸出板的電磁繼電器常閉觸點實現。當中心控制計算機對聯鎖1繼電器施加控制信號時,其觸點由閉合狀態轉為斷開狀態,表示地面測控系統與飛行控制系統之間的電連接器已斷開。在飛行控制系統一側,可通過輔助電源及光耦電路讀取聯鎖1信號電平的變化,獲取兩個系統之間電連接器的連接/斷開狀態。
故障診斷計算機模擬飛行控制系統,利用自身的開關量輸入板檢查來自中心控制計算機的聯鎖1信號,電路連接關系如圖2所示。具體測試步驟如下:
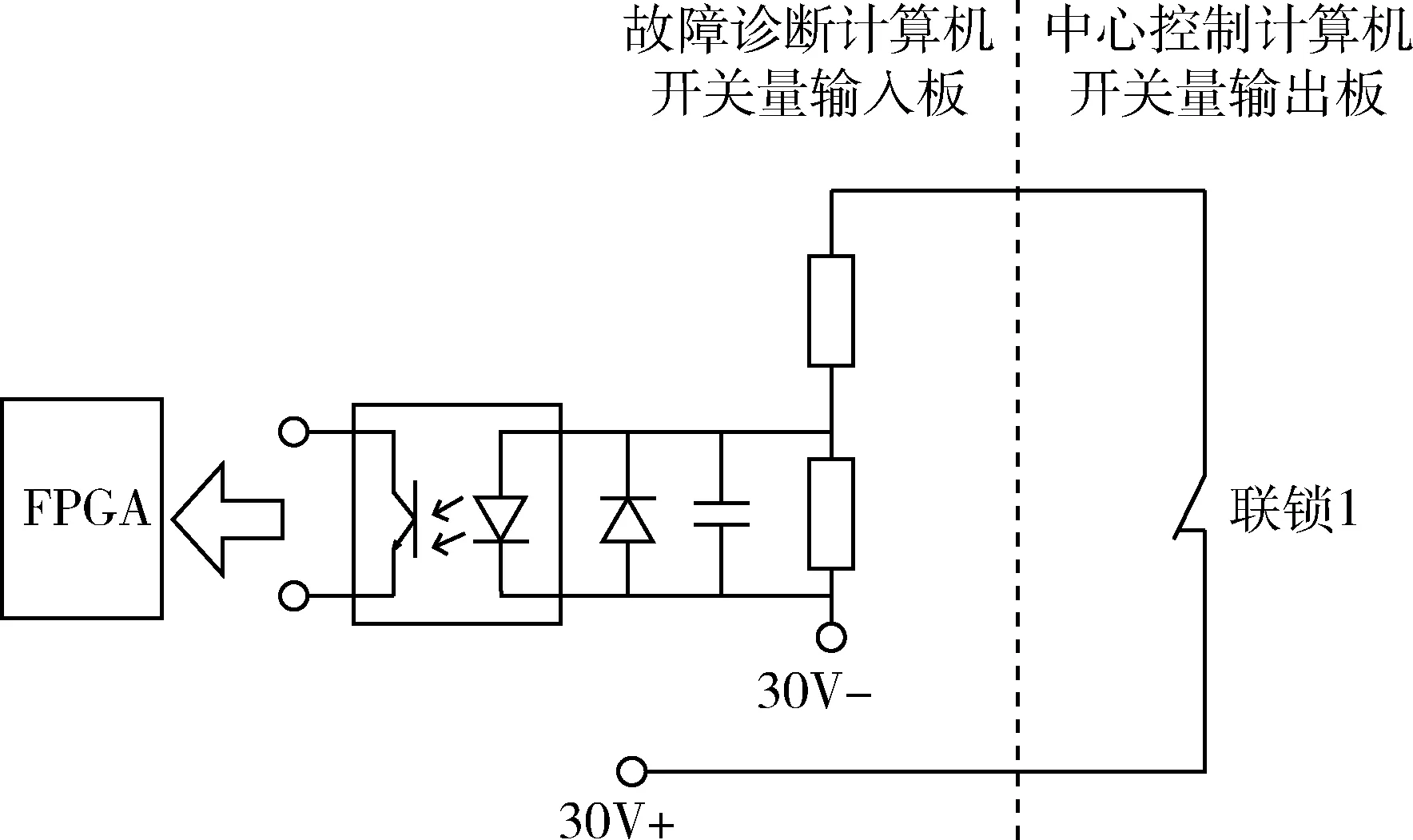
圖2 聯鎖1信號自檢電路示意圖
1)故障診斷計算機采集聯鎖1觸點閉合的狀態,此時讀取結果應為高電平;
2)測試結果合格后,由中心控制計算機控制斷開聯鎖1繼電器的觸點,故障診斷計算機再次采集該觸點的狀態,此時讀取結果應為低電平;
3)測試結果合格后,由中心控制計算機控制接通聯鎖1繼電器的觸點,將觸點恢復到初始狀態。
如果以上3個測試步驟能夠順利通過,則表明聯鎖1開關量工作正常。
(2)聯鎖2
聯鎖2信號與聯鎖1信號功能相同,均用來表征地面測控系統與飛行控制系統之間電連接器的連接狀態。不同的是聯鎖2信號為飛行控制系統一側短接。地面測控系統中心控制計算機通過輔助電源及光耦電路讀取聯鎖2信號電平的變化,可獲取兩個系統之間的電連接器連接或斷開狀態。
這里,采用故障診斷計算機來模擬飛行控制系統實現聯鎖2信號的短接狀態,具體可有2種實現方法:1)在兩個系統互聯的電連接器上,利用跨線將飛行控制系統一側的聯鎖2信號直接短接;2)利用故障診斷計算機開關量輸出板上繼電器的常閉觸點實現信號短接。分析發現,如果采用第1種方法,每當對聯鎖2信號進行測試時,需要試驗人員手動斷開兩個系統之間的電連接器,測試結束后還需要將其重新連接好,降低了測試效率,有悖于實現快速自檢測試的初衷。因此,采用第2種方法,即由故障診斷計算機開關量輸出板的繼電器常閉觸點實現該聯鎖2的短接狀態,具體電路連接關系如圖3所示。
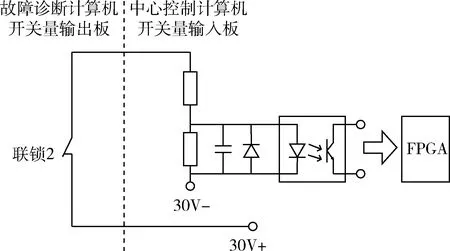
圖3 聯鎖2信號自檢電路示意圖
聯鎖2開關量的測試方法與聯鎖1相同,僅需將聯鎖1測試方法中的故障診斷計算機與中心控制計算機的角色進行互換,此處不再贅述。
(3)允許投放
允許投放信號為有源開關量信號,通過中心控制計算機開關量輸出板的繼電器觸點實現,電源供電由30V直流電源提供。當觸點由斷開轉為閉合時,發出30V允許投放信號。
故障診斷計算機模擬飛行控制系統的接收電路,通過開關量輸入板的光耦接收電路,即可實現對允許投放信號的讀取,具體電路連接關系如圖4所示。
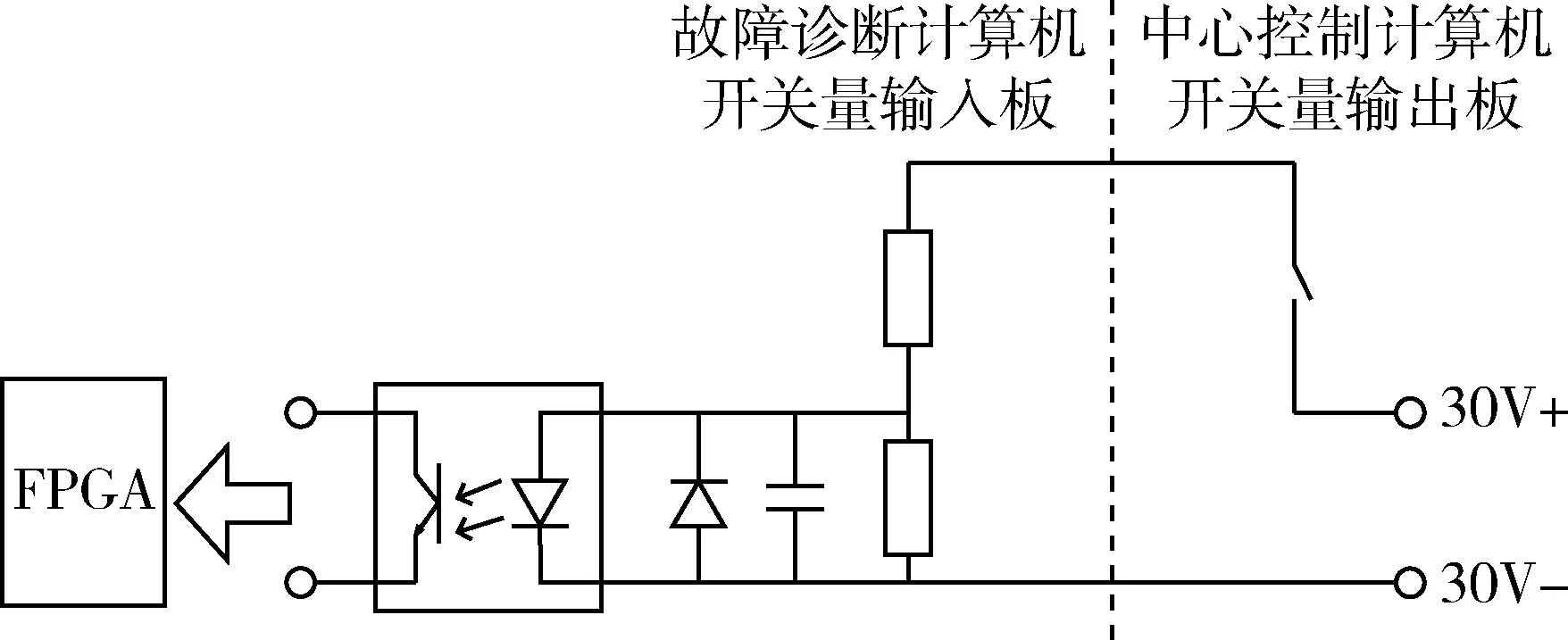
圖4 允許投放信號自檢電路示意圖
允許投放信號的測試依然按照觸點斷開、觸點閉合2個狀態進行測試,測試方法與聯鎖1和聯鎖2類似。
2.2 電源供電輸出自檢
由圖1和表1可知,地面測控系統需要進行測試的供電輸出信號共6路:包括30V直流供電輸出2路、160V直流供電輸出4路,分別來自30V直流電源和4臺160V直流電源。利用AD模擬量采樣的方法,對6路被測信號進行電壓測試,判斷其電壓值是否合格。
按照如圖5所示電路,實現故障診斷計算機與被測信號之間的連接。針對單路信號的采樣:首先,利用繼電器切換選通及信號調理電路,使6路信號中的1路進入AD采樣通道;然后,依次經過電壓跟隨、AD采樣、隔離等環節后,進入FPGA;最后,由FPGA軟件對電壓信號連續采樣6次,去掉其中的最大值和最小值,以余下4次采樣值的均值作為本路采樣的最終結果。
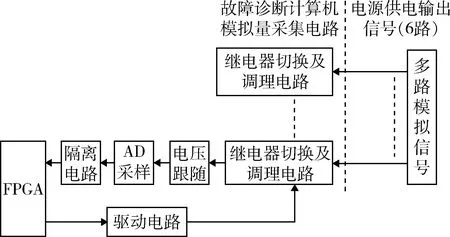
圖5 電源供電輸出信號自檢示意圖
為采樣測試全部6路直流供電信號,設計8個流程步,按照1~8的順序依次進行,詳見表2所示。在每個測試流程步中,均對6路信號進行采樣,其中,流程2~6均只接通1路被測信號。比對采樣值與判據,如果結果在判據范圍內,表明測試通過。

表2 模擬量采集流程分布表
經過8個流程步,除了能夠完成對6路信號的測試,也最大程度地規避了6路被測信號中部分信號發生粘連的情況,提高了測試分辨率。
2.3 時間同步脈沖信號自檢
地面測控系統中心控制計算機向飛行控制系統發送時間同步脈沖信號,該信號采用RS422差分電平標準,脈沖周期為1s,占空比為1/1000。
在對時間同步脈沖進行測試時,通過信號轉接棘爪電纜,將該信號引入故障診斷計算機的RS422測試接口板上,如圖6所示。由中心控制計算機發送若干連續的時間同步脈沖,故障診斷計算機對該脈沖串進行讀取,識別出脈沖個數、單脈沖的周期和占空比,作為測試結果。如果測試結果與實際發送值一致,表明測試通過。
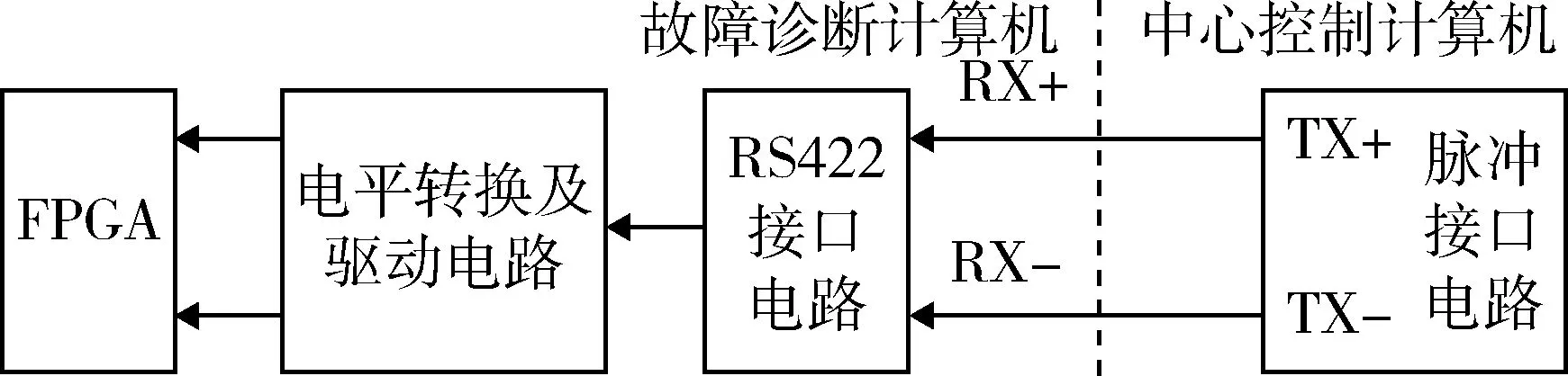
圖6 時間同步脈沖信號自檢示意圖
2.4 1553B總線自檢
地面測控系統與飛行控制系統之間采用1553B總線進行通信,主干總線位于地面測控系統中,中心控制計算機作為總線BC,飛行控制系統作為總線RT,均以“子線+耦合變壓器”的方式掛接在主干總線上。
故障診斷計算機模擬飛行控制系統RT,利用信號轉接棘爪電纜中的1553B子線,連接至地面測控系統的主干總線上,連接關系如圖7所示。
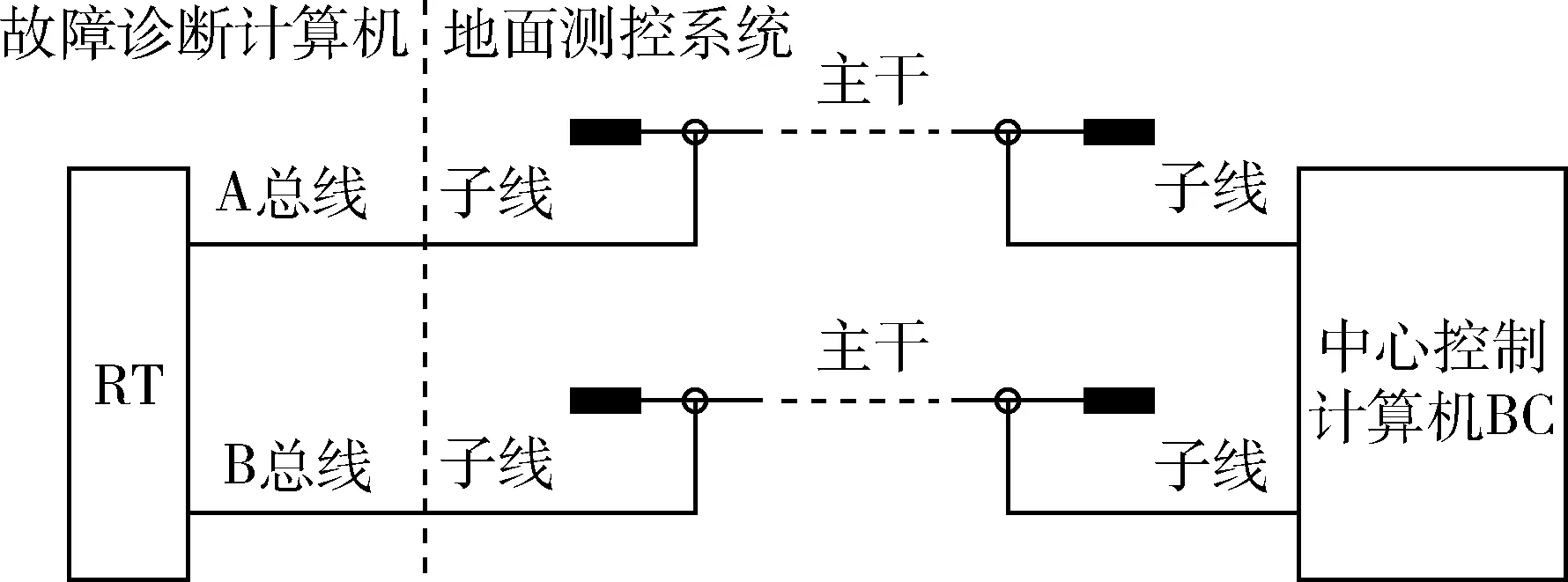
圖7 1553B總線自檢連接關系示意圖
1553B總線測試時,采用對A總線和B總線依次進行數據通信測試的方法。首先,中心控制計算機作為BC,通過A總線向故障診斷計算機RT連續發送若干包測試數據,故障診斷計算機將接收到的數據逐包與發送數據進行比對,如果一致,則A總線測試通過。然后,中心控制計算機與故障診斷計算機之間采用同樣的方法,完成B總線的數據通信測試。如果A總線和B總線測試均正常,則表明1553B總線通路測試通過。
3 自檢測試軟件實現
3.1 并行測試技術
并行測試技術是將并行處理技術引入自動測試領域后形成的一種先進測試技術,旨在提高測試效率,這一技術也被美國NxTest體系確定為下一代關鍵技術[5-6]。
綜合考慮并行測試技術的應用場景,并行測試有以下2種實施方式::1)多處理器并行測試。一般采用兩個及以上的處理器,對所有被測對象及參數進行測試,對于軟、硬件的資源消耗較高。2)用單處理器實現并行測試結構。通過對不同測試任務的合理調度,劃分處理器處理不同任務的時間,實現并行測試[7-8]。這里,采用第2種方式實現地面測控系統的快速自檢測試。
(1)主控軟件并行處理算法
主控軟件作為并行測試流程的發起者,是測試流程的控制核心。主控軟件將測試項目轉化為相應的多個測試線程。在主控軟件啟動測試任務后,創建多個測試線程,各線程依據既定計劃獨立、并行發起測試,相互之間無耦合[9-10]。
(2)測試終端并行處理算法
與主控軟件相對應,測試終端是測試指令的執行者,在測試終端軟件中,針對主控軟件發送的多個并行測試指令,設計專門的“任務緩存區”。測試終端軟件將收到的指令先放到任務緩存區中,再從任務緩存區中依次接收任務,創建相應的、相互獨立的測試線程,并行處理測試任務,處理完成后將測試結果分別反饋給主控軟件,測試終端軟件的并行測試算法如圖8所示[8]。
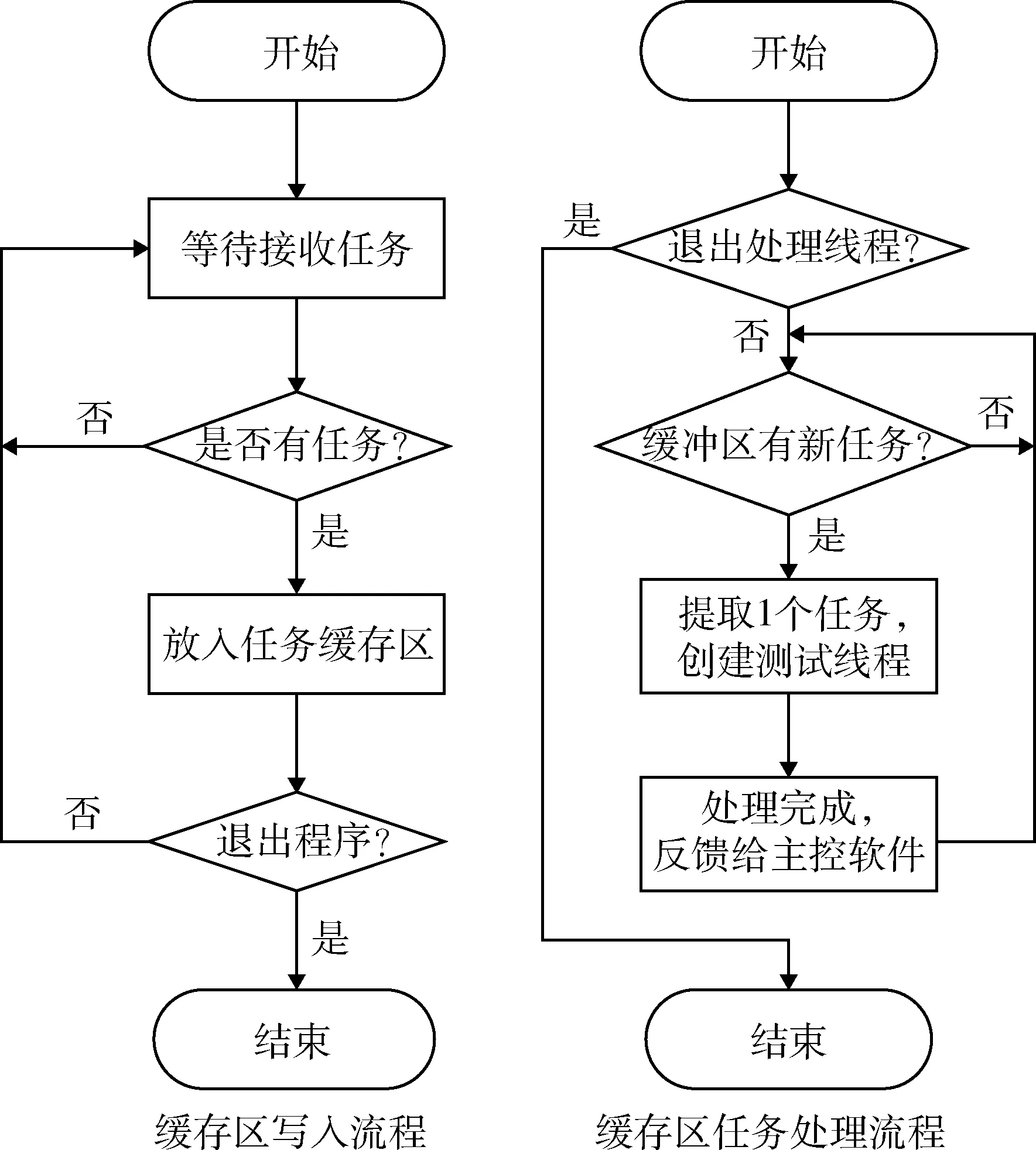
圖8 測試終端并行測試流程圖
3.2 并行測試流程設計
3.2.1 方案概述
故障診斷計算機軟件作為自檢主控軟件,對地面測控系統自檢的測試需求,發起若干并行測試線程。中心控制計算機軟件作為測試終端軟件,一方面接收并響應來自自檢主控軟件的測試指令,創建相應的測試線程,另一方面調度地面測控系統中的其余被測對象,獲取相關測試數據,并向自檢主控軟件反饋。
3.2.2 自檢主控軟件工作流程設計
自檢主控軟件啟動后,創建開關量測試、電源供電測試、時間同步脈沖測試、1553B總線測試、測試報告生成等5個線程,并向測試終端軟件(即中心控制計算機軟件)發送測試指令,所有線程并行發起測試工作。這里,以開關量測試線程為例,簡要說明其工作過程:
開關量測試線程啟動后,向測試終端軟件發送開關量測試指令,然后依次對聯鎖1、聯鎖2和允許投放3個開關量進行測試,針對每個開關量測試,軟件按照如下工作流程進行處理(以聯鎖1開關量測試為例)。
1)向測試終端軟件發送測試指令,通知當前測試項目為聯鎖1測試,讀取聯鎖1開關量當前狀態并記錄、判讀;
2)向測試終端軟件發送測試指令,通知測試終端軟件控制聯鎖1繼電器觸點動作,延時一定時間后,讀取聯鎖1開關量當前狀態并記錄、判讀;
3)向測試終端軟件發送測試指令,通知測試終端軟件復位聯鎖1繼電器,使觸點恢復至閉合狀態;
4)向測試終端軟件發送當前測試項目結束指令,匯總原始記錄和判讀結果,發送給測試報告生成線程。
待自檢主控軟件所有測試線程均完成測試工作后,測試報告生成線程將測試數據匯總、整理,生成WORD測試報告,通過以太網發送至中心控制計算機的指定硬盤目錄下,供測試人員進行數據分析及歸檔。
至此,自檢主控軟件所有測試工作完成。
3.2.3 測試終端軟件工作流程設計
如3.2.1節所述,測試終端軟件(中心控制計算機軟件)作為地面測控系統若干被測對象的控制核心,創建任務緩存線程,接收并存儲來自自檢主控軟件的測試任務指令。根據任務緩存區的指令,分別創建相應的測試線程,各線程同步運行,根據各自的既定策略,按需調度地面測控系統中的被測對象,配合自檢主控軟件完成當前測試項目。
同樣以開關量測試線程為例,簡要說明測試終端軟件的工作過程:
1)從任務緩存區讀取到開關量測試任務,創建開關量測試線程;
2)接收自檢主控軟件發送的測試指令(僅以聯鎖1開關量測試為例),得知當前測試項目為聯鎖1測試;
3)接收自檢主控軟件發送的測試指令,控制聯鎖1繼電器動作,使觸點由閉合轉為斷開;
4)接收自檢主控軟件發送的測試指令,復位聯鎖1繼電器動作,使觸點恢復為閉合狀態;
5)接收自檢主控軟件發送的當前測試項目結束指令,線程結束。
當測試終端軟件接收到自檢主控軟件發送的軟件退出指令后,結束所有線程,軟件退出。
4 實施效果
將并行測試技術應用于地面測控系統的自檢測試中,并行執行所有測試項目,形成測試流程圖如圖9所示。
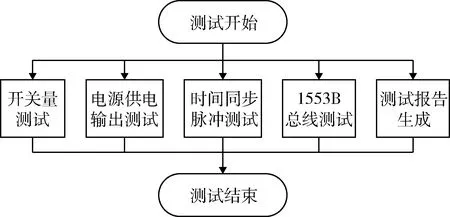
圖9 地面測控系統自檢并行測試流程圖
經過實際測試,采用并行測試方案后,完成全部自檢項目測試耗時9min,而如果采用串行測試方案,完成全部自檢測試項目耗時24min,并行測試的測試效率提升了166.7%,詳見表3所示。通過對比表3中的數據發現,采用串行測試方法自檢耗時是所有測試項目的累加和,而采用并行測試技術的耗時時間取決于測試耗時最長的項目。此外,與串行測試方法相比,測試報告生成項目運行耗時由1min增加至9min,原因是采用并行測試技術后,該測試項目的啟動時間大大提前,啟動后一直在同步搜集其他測試項目的測試數據,運行時間貫穿整個并行測試流程的始終,造成單項耗時增加,但對整個并行測試流程的總耗時影響不大。
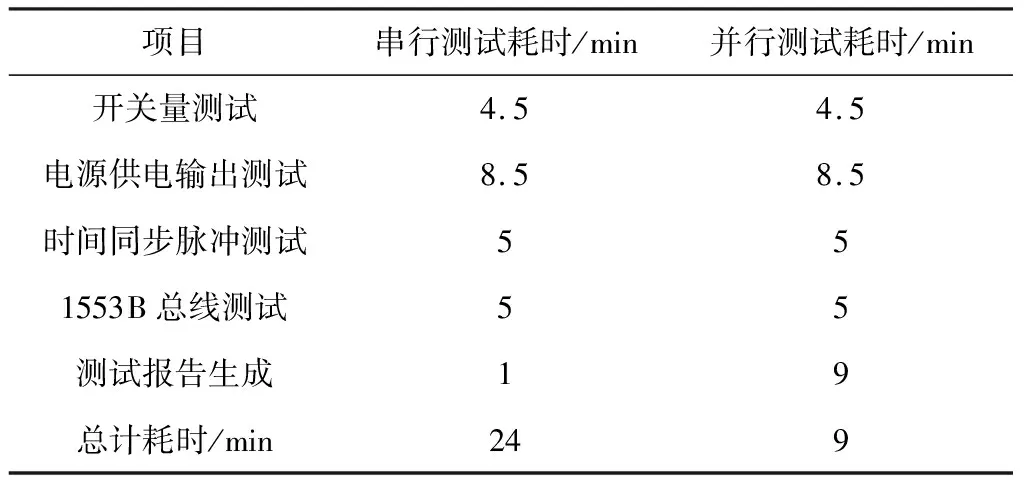
表3 實施效果統計表
通過并行測試方案的實施,可以得出以下幾點結論:
1)地面測控系統計算機充足的多任務處理能力,為開展并行測試提供了硬件條件;
2)在并行測試任務中,不能存在互斥性測試需求,各測試線程應相互獨立,否則可能導致測試失敗;
3)與傳統串行測試方案相比,并行測試能夠提高測試效率。在硬件資源允許的條件下,并行測試線程越多,對測試效率的提升效果越顯著。
5 結束語
為了滿足地面測控系統快速自檢的測試需求,利用系統中現有的故障診斷計算機的硬件資源,提出并實現了基于并行測試技術的自檢方法。該方法在對被測信號進行充分分析、歸類的基礎上,設計了測試項目及測試方法,使各測試項目并行運行,顯著提高了測試效率。將并行測試技術應用到地面測控系統的自檢測試中,是對地面測控系統快速測試領域研究的一次探索。進一步將并行測試技術應用到針對飛行控制系統的快速測試中是后續的研究工作。
猜你喜歡
小學科學(學生版)(2021年7期)2021-07-28 06:44:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
科技傳播(2019年22期)2020-01-14 03:06:34
電子制作(2018年11期)2018-08-04 03:25:42
消費導刊(2017年20期)2018-01-03 06:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
衡陽師范學院學報(2015年3期)2015-02-10 06:02:23
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
