一種新的魯棒PM濾波及其在組合導(dǎo)航中的應(yīng)用*
2021-11-18 07:56:40張子劍崔利軍
航天控制 2021年2期
梁 浩 張子劍 賈 睿 崔利軍
1.北京宇航系統(tǒng)工程研究所,北京 100076 2.太原衛(wèi)星發(fā)射中心,山西太原 030027
0 引言
星光導(dǎo)航系統(tǒng)(CNS)具有精度高、自主隱蔽的特點(diǎn),能夠?yàn)檩d體提供高精度姿態(tài)信息[1];合成孔徑雷達(dá)(Synthetic Aperture Radar,SAR)是一種高精度微波成像雷達(dá),它具有全天時(shí)、全天候、遠(yuǎn)距離工作的優(yōu)點(diǎn)[2];CNS、SAR和捷聯(lián)慣導(dǎo)(SINS)組成的CNS/SAR/SINS組合導(dǎo)航系統(tǒng)是一種性能優(yōu)異的無依托自主導(dǎo)航方式[3-4]。
Kalman濾波限制條件比較苛刻,要求系統(tǒng)模型精確已知,然而在實(shí)際應(yīng)用中,受各種條件的限制,很難獲得噪聲準(zhǔn)確的先驗(yàn)統(tǒng)計(jì)特性;另一方面,系統(tǒng)的噪聲特性也是不穩(wěn)定的,噪聲特性因內(nèi)部器件特性變化或外部力學(xué)沖擊等環(huán)境因素,可能產(chǎn)生不可預(yù)知的變化。
為了處理這種存在偏差的系統(tǒng),魯棒濾波被研究并發(fā)展應(yīng)用起來,M估計(jì)濾波和H∞濾波是2種最典型的魯棒濾波,被廣泛用來處理高斯分布受到污染或干擾的系統(tǒng)。M估計(jì)濾波對(duì)應(yīng)用系統(tǒng)的噪聲特性變化較遲鈍,能夠解決系統(tǒng)噪聲和測量噪聲統(tǒng)計(jì)特性不確定的問題[5-6],H∞估計(jì)濾波將模型誤差看作未知但有界的噪聲,使噪聲污染情況下的估計(jì)誤差最小[7],但當(dāng)系統(tǒng)出現(xiàn)尖銳的野值時(shí),M估計(jì)濾波和H∞濾波均會(huì)出現(xiàn)較大誤差以至發(fā)散。
本文針對(duì)組合導(dǎo)航系統(tǒng)中出現(xiàn)多種尖銳野值的情況,引入GM估計(jì)野值檢測抑制方法,構(gòu)建了魯棒PM估計(jì)濾波,應(yīng)用于高空飛行器CNS/SAR/SINS組合導(dǎo)航中,并進(jìn)行了仿真分析。
1 基于M估計(jì)的線性濾波
1964年,Huber經(jīng)過嚴(yán)格的推導(dǎo)[5],提出了廣義極大似然估計(jì),即M估計(jì)魯棒濾波。針對(duì)高斯噪聲受到污染的系統(tǒng),M估計(jì)結(jié)合了l1和l2范數(shù)構(gòu)造代價(jià)函數(shù),其魯棒性優(yōu)于l2范數(shù)估計(jì),其優(yōu)點(diǎn)是保證最大漸近估計(jì)方差最小以及純高斯分布時(shí)l2范數(shù)估計(jì)的效率。
線性離散系統(tǒng)如下
xk=Fk-1xk-1+wk-1
(1)
yk=Hkxk+vk
(2)
式中:xk為狀態(tài)量,yk為觀測量,F(xiàn)k-1為狀態(tài)轉(zhuǎn)移矩陣;系統(tǒng)噪聲wk-1和量測噪聲vk為高斯白噪聲,方差為Qk-1和Rk。
1)預(yù)測

(3)
(4)
2)更新
(5)
針對(duì)量測更新過程,構(gòu)造線性回歸模型以提高系統(tǒng)的冗余性:
(6)
定義如下變量:
(7)
(8)
(9)
(10)
則線性回歸模型可以轉(zhuǎn)化為
zk=Mkxk+ξk
(11)
M估計(jì)求解如下代價(jià)函數(shù)的極小值,通過求解代價(jià)函數(shù)獲得狀態(tài)估計(jì)值:
(12)
式中:ei=(zk-Mkxk)i;ρ為任意函數(shù),通過選擇ρ函數(shù),可以使估計(jì)器獲得某些特定的性質(zhì),Huber建議的ρ函數(shù)形式如下
(13)
式中:μ為可調(diào)節(jié)參數(shù)。而當(dāng)殘差較大時(shí),ρ函數(shù)具有l(wèi)1范數(shù)的性質(zhì),相反當(dāng)殘差較小時(shí),ρ函數(shù)具有l(wèi)2范數(shù)的性質(zhì)。通過配置μ,可以使濾波器在高斯分布下具有較高的估計(jì)效率,并且能夠抑制濾波噪聲污染對(duì)系統(tǒng)的影響。
Huber在公開文獻(xiàn)中已證明,當(dāng)選擇式(13)作為ρ函數(shù)的形式時(shí),M估計(jì)濾波對(duì)受污染的高斯系統(tǒng)具有漸近最優(yōu)魯棒性。
2 魯棒PM估計(jì)
2.1 系統(tǒng)野值的類別及影響
在實(shí)際系統(tǒng)中除了存在受污染的高斯噪聲,還會(huì)存在各種干擾野值,一般認(rèn)為在組合導(dǎo)航系統(tǒng)中出現(xiàn)的野值主要是系統(tǒng)狀態(tài)野值和量測野值2種,然而狀態(tài)轉(zhuǎn)移矩陣和量測矩陣中也會(huì)出現(xiàn)野值,稱為結(jié)構(gòu)野值,結(jié)構(gòu)野值是由時(shí)變系統(tǒng)模型匹配錯(cuò)誤和計(jì)算浮點(diǎn)數(shù)錯(cuò)誤等引起的,3種類型野值列表如下。
在回歸模型中野值點(diǎn)遠(yuǎn)離其它正常點(diǎn),會(huì)對(duì)M估計(jì)產(chǎn)生較大的影響,M估計(jì)也僅能夠抑制系統(tǒng)的部分量測野值,當(dāng)系統(tǒng)同時(shí)存在表1中的3種野值時(shí),M估計(jì)濾波會(huì)出現(xiàn)偏差。

表1 組合導(dǎo)航系統(tǒng)中3種野值類型
近年來,在電力系統(tǒng)狀態(tài)估計(jì)中,出現(xiàn)了一種廣義M估計(jì)(GM估計(jì))濾波算法[8],通過構(gòu)造回歸模型并采用迭代方法求解最優(yōu)估計(jì),GM估計(jì)對(duì)量測野值、狀態(tài)野值和結(jié)構(gòu)野值均具有魯棒性。GM估計(jì)包括Mallows型GM估計(jì)和Schweppe型GM估計(jì)2種,Mallows型GM估計(jì)在目標(biāo)函數(shù)中引入權(quán)函數(shù)以降低所有量測點(diǎn)的權(quán)重,Schweppe型GM估計(jì)只針對(duì)野值點(diǎn)進(jìn)行衰減,后者具有更高的效率。
2.2 GM估計(jì)中的PS野值檢測方法

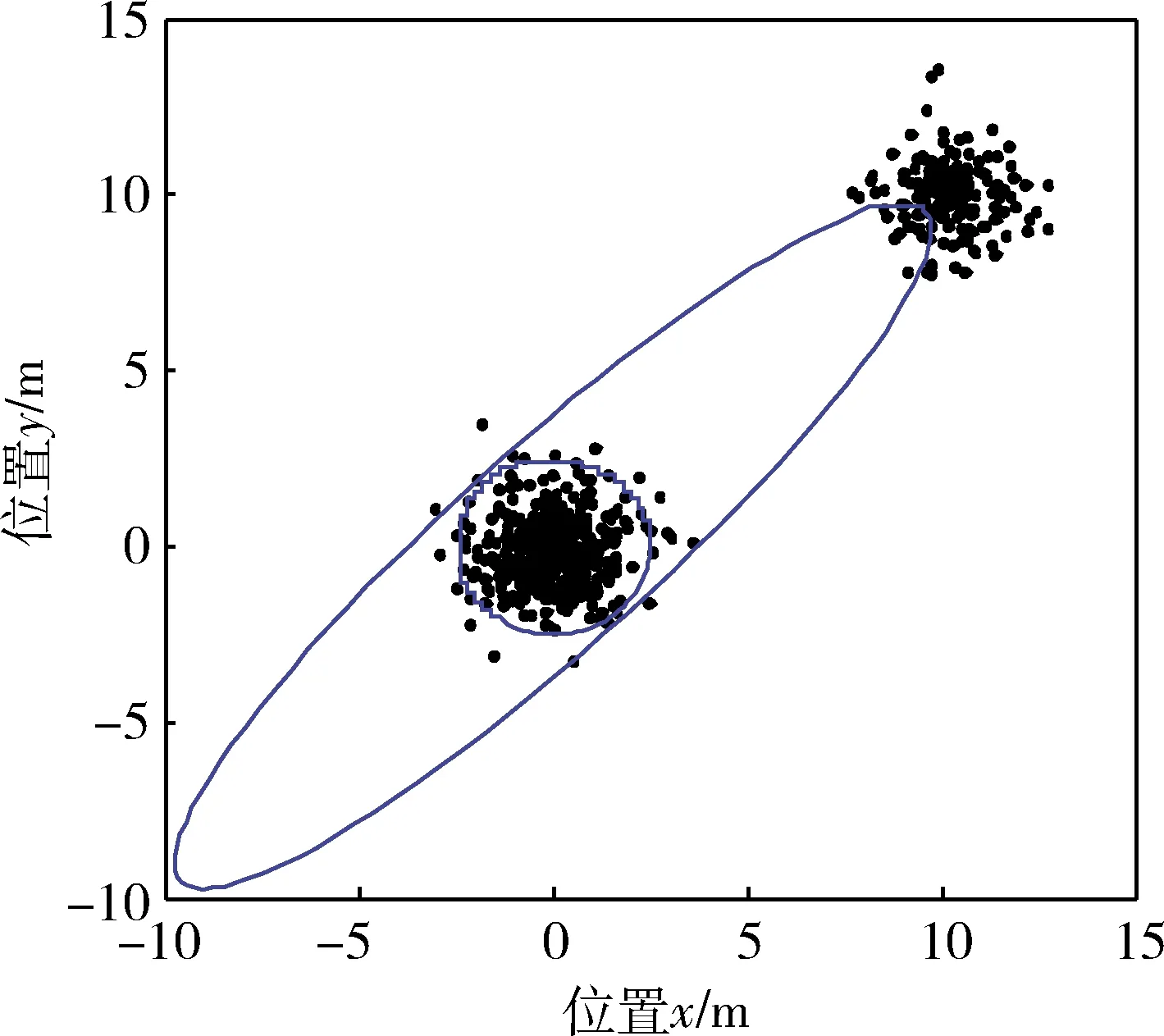
圖1 導(dǎo)航系統(tǒng)中被污染的樣本點(diǎn)
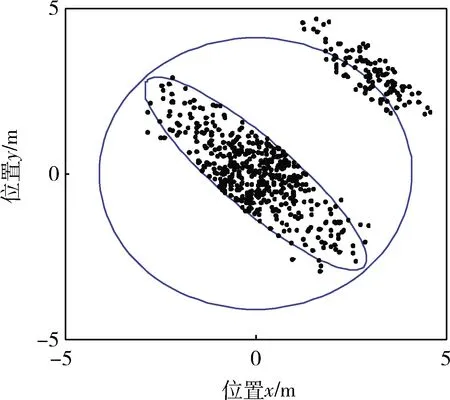
圖2 預(yù)白化處理后的樣本點(diǎn)分布
MD(Mahalanobis Distances)是一種經(jīng)典的基于樣本點(diǎn)均值和方差的野值檢測方法,定義樣本點(diǎn)集的中心為c=[p1,p2]T,同一組狀態(tài)信息樣本點(diǎn)形成一擬合圓,令di=[di1,di2]T表示樣本點(diǎn)xi(i=1,…,m)到擬合圓的矢量,xi到擬合圓的距離為p3,那么di又可表示為di=(xi-c)(1-p3/‖xi-c‖)。MD野值檢測方法表示如下
(14)
(15)
(16)

為此,人們提出了一種魯棒的野值檢測方法,魯棒PS(Projection Statistics)檢測法[9],PS利用樣本點(diǎn)中值和中值絕對(duì)偏差(Median Absolute Deviation, MAD)來構(gòu)造檢測方程:
(17)
式中:uk表示PSi檢測的基準(zhǔn)方向,每個(gè)點(diǎn)都需對(duì)m個(gè)方向的投影進(jìn)行檢測;PS方法受野值點(diǎn)干擾較小,當(dāng)同時(shí)存在多處野值時(shí)也能夠準(zhǔn)定位,其計(jì)算速度也較快。
2.3 魯棒PM估計(jì)濾波構(gòu)建
將GM估計(jì)中的PS野值檢測方法應(yīng)用到M估計(jì)濾波中,構(gòu)建一種新的魯棒PM(Projection M-estimation)估計(jì)濾波。構(gòu)建方法為:
(18)
3 CNS/SAR/SINS組合導(dǎo)航模型
3.1 捷聯(lián)慣導(dǎo)誤差傳播模型
捷聯(lián)慣性導(dǎo)航系統(tǒng)是飛行器CNS/SAR/SINS組合導(dǎo)航系統(tǒng)的核心,SINS的誤差傳播方程也是組合濾波器模型的基礎(chǔ)。根據(jù)SINS誤差傳播方程構(gòu)建組合系統(tǒng)的狀態(tài)方程,利用CNS和SAR的外部導(dǎo)航量構(gòu)建量測方程,設(shè)計(jì)濾波器對(duì)慣導(dǎo)誤差進(jìn)行估計(jì)。
以東北天地理坐標(biāo)系為導(dǎo)航坐標(biāo)系,CNS/SAR/SINS組合導(dǎo)航系統(tǒng)的慣導(dǎo)誤差傳播模型為[10-11]:
(19)

(20)
(21)
(22)
3.2 觀測方程
星光導(dǎo)航系統(tǒng)中星敏感器實(shí)際測得的星光矢量可表示為
(23)
星光矢量的理論測量值為:
(24)

星敏感器對(duì)星光矢量的實(shí)際測量值rb與理論測量值pb有一定的偏差:
(25)
星光導(dǎo)航系統(tǒng)中一般將2個(gè)星敏儀正交安裝,把星敏感器實(shí)際測得的2個(gè)星光矢量rb1、rb2與理論測量值pb1,pb2相減,得到CNS/SINS的觀測量,INS的水平位置與SAR輸出的水平位置之差構(gòu)成SAR/SINS量測信息[12],則CNS/SAR/SINS系統(tǒng)的量測方程為
(26)
其中:vk為量測噪聲。
3 仿真校驗(yàn)
將常規(guī)Kalman濾波、M估計(jì)線性濾波以及魯棒PM濾波分別應(yīng)用于CNS/SAR/SINS組合導(dǎo)航系統(tǒng)進(jìn)行數(shù)學(xué)仿真實(shí)驗(yàn)。
仿真參數(shù)設(shè)置為:飛行器初始位置為東經(jīng)116°,北緯38°,速度180m/s,方位角40°,俯仰和滾轉(zhuǎn)角為0°,飛行器有0.3m/s2的加速度和0.2(°)/s的轉(zhuǎn)彎角速度。捷聯(lián)慣導(dǎo)陀螺零漂不穩(wěn)定值0.05(°)/h,加表零偏不穩(wěn)定值100μg;星敏感器導(dǎo)航精度為20″(1σ),SAR導(dǎo)航位置精度為20m(1σ)。仿真時(shí)間100s。
由于高空飛行器導(dǎo)航系統(tǒng)長時(shí)間工作,導(dǎo)航系統(tǒng)不可避免會(huì)出現(xiàn)各種野值、噪聲特性產(chǎn)生變化。下面通過設(shè)置不同的仿真條件,對(duì)3種線性濾波算法進(jìn)行對(duì)比分析。
仿真條件1:
各導(dǎo)航設(shè)備的噪聲統(tǒng)計(jì)特性為受到污染的混合高斯分布,方差是原高斯分布的3倍,污染率為ε=0.2,混合高斯分布描述如下

(33)
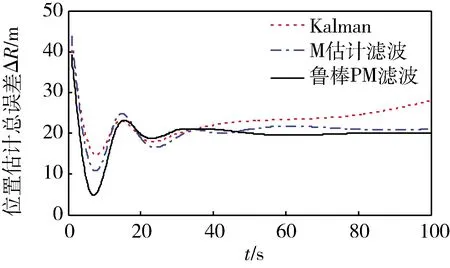
圖4 水平位置估計(jì)總誤差
仿真條件2:

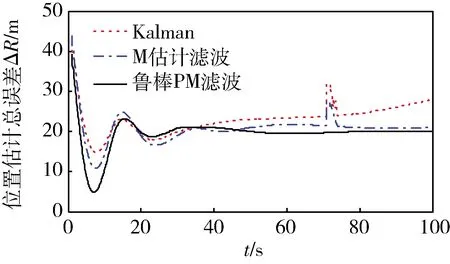
圖6 水平位置估計(jì)總誤差
仿真結(jié)果圖3~4表明,當(dāng)導(dǎo)航設(shè)備的噪聲特性為混合高斯分布時(shí),常規(guī)Kalman濾波呈發(fā)散趨勢、估計(jì)誤差較大,M估計(jì)濾波和魯棒PM濾波估計(jì)精度較高,驗(yàn)證了M估計(jì)濾波和魯棒PM濾波對(duì)受污染的高斯分布噪聲具有魯棒性。
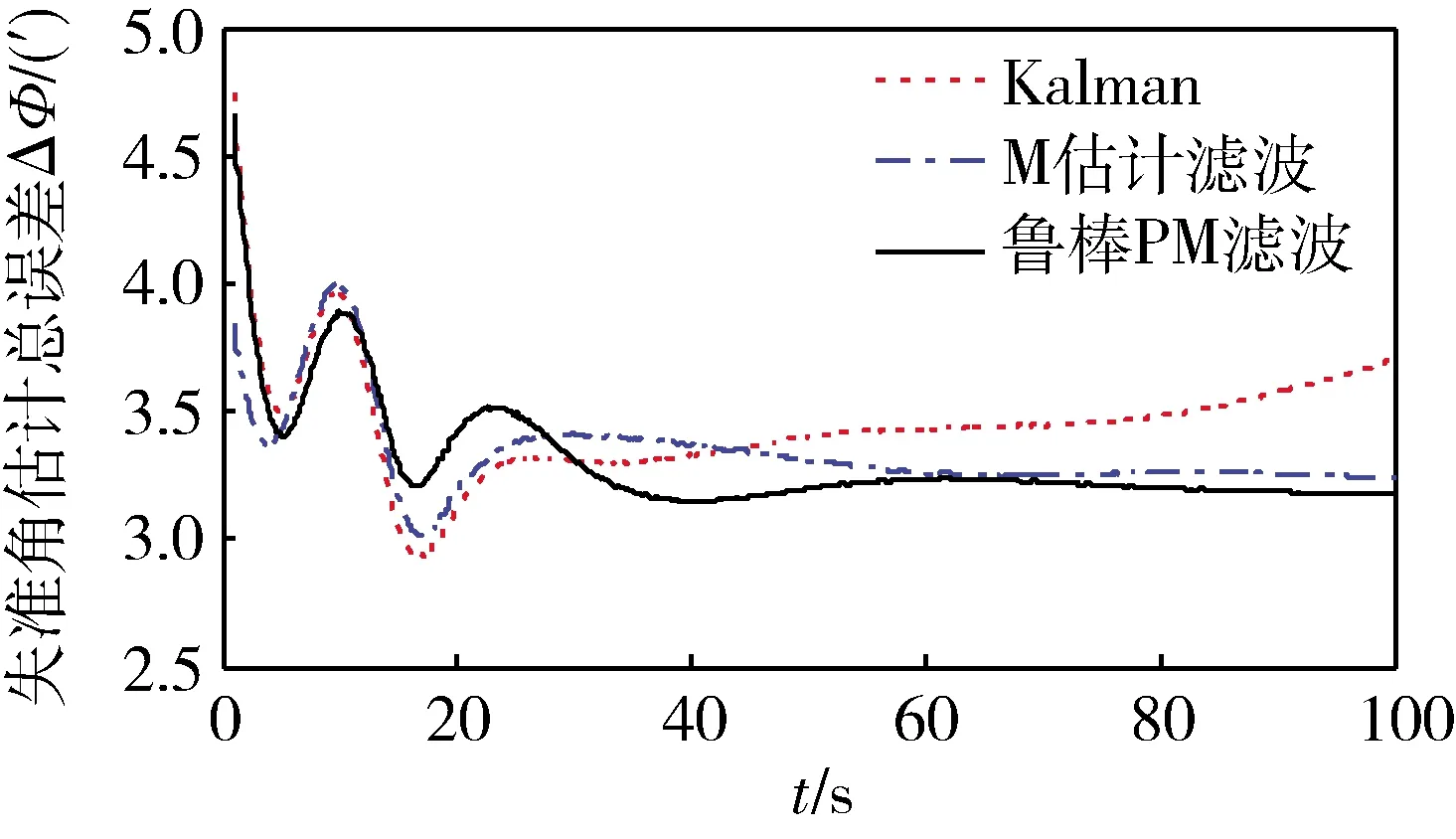
圖3 三向姿態(tài)失準(zhǔn)角估計(jì)總誤差
仿真結(jié)果圖5~6表明,當(dāng)導(dǎo)航系統(tǒng)中存在尖銳野值和結(jié)構(gòu)野值時(shí),常規(guī)Kalman濾波和M估計(jì)濾波對(duì)這些野值無法抑制,而本文提出的魯棒PM濾波使用了PS野值檢測方法和魯棒構(gòu)架,可以對(duì)污染噪聲和多種野值進(jìn)行有效抑制。
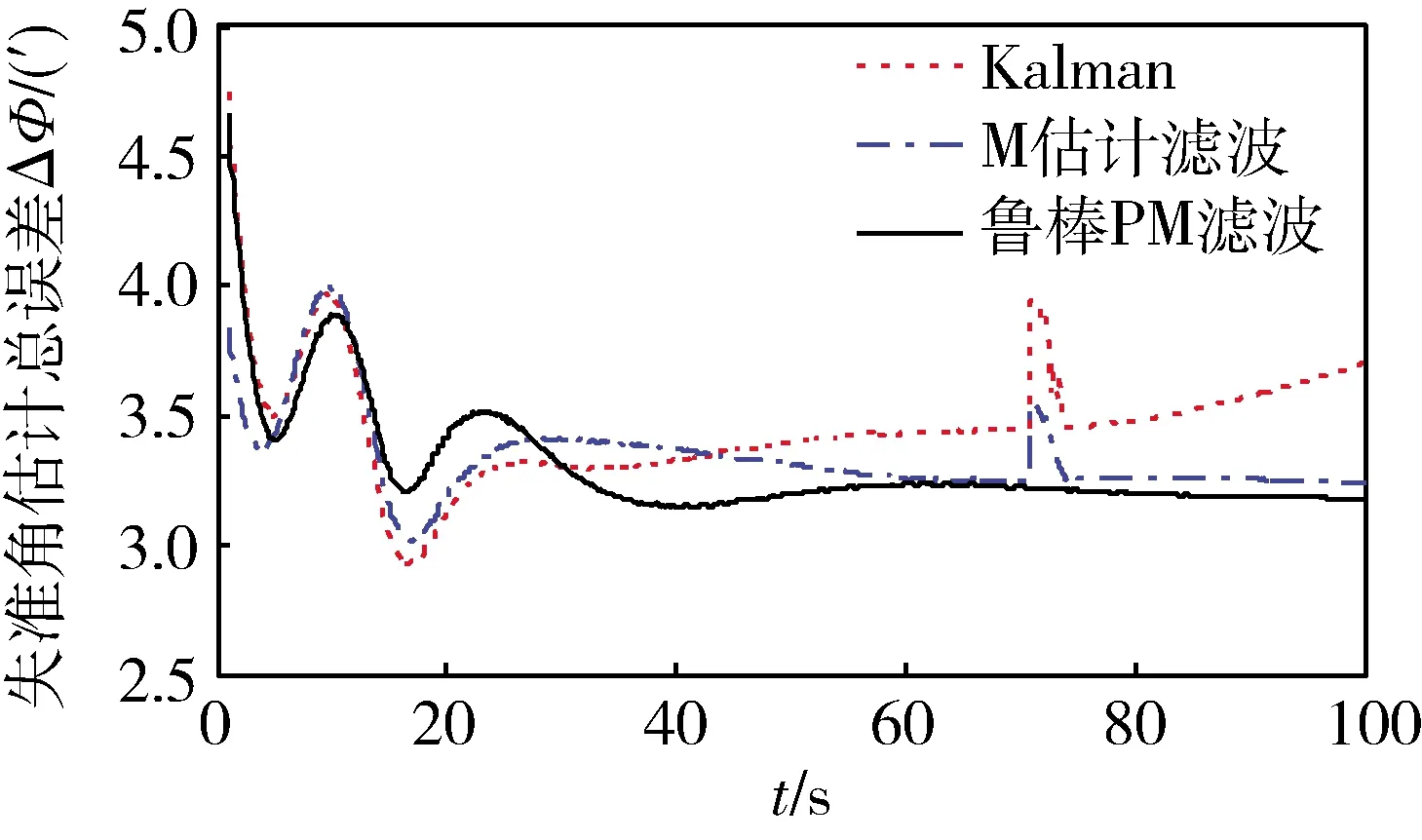
圖5 三向姿態(tài)失準(zhǔn)角估計(jì)總誤差
4 結(jié)論
分析了傳統(tǒng)的M估計(jì)濾波在處理系統(tǒng)野值上的缺陷,借鑒了電力系統(tǒng)中的魯棒PS野值檢測方法,將魯棒PM估計(jì)濾波應(yīng)用到組合導(dǎo)航系統(tǒng)中,以CNS/SAR/SINS非線性組合導(dǎo)航為應(yīng)用背景,對(duì)常規(guī)Kalman濾波、M估計(jì)線性濾波以及魯棒PM濾波進(jìn)行了對(duì)比分析。仿真結(jié)果表明,魯棒PM濾波能夠同時(shí)對(duì)受污染的高斯噪聲和多種系統(tǒng)野值進(jìn)行抑制,具有較強(qiáng)的結(jié)構(gòu)抗差能力。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
