基于TRIZ理論的無人超市購物小車設計
2021-11-23 07:55:42趙瑋
承德石油高等專科學校學報 2021年5期
趙 瑋
(承德石油高等專科學校,機械工程系,河北 承德 067000)
傳統的零售店問題日趨嚴重,一方面因為傳統零售的人力成本逐年增加,另一方面因為貨物樣式多,管理困難大,并且由于新冠疫情的影響,人與人接觸的零售模式受到了很大的沖擊,因此實現對超市的自動化、智能化、安全化管理是至關重要的。本文運用TRIZ理論對無人超市購物小車進行因果分析并建立了功能模型[1-2],結合沖突解決理論和進化工具進行無人超市購物小車的設計。
1 無人超市購物小車的工作原理及存在的問題
1.1 工作原理

如圖1所示的無人超市自動取貨小車可以根據采購者輸入的貨物編號,自動地定位到該貨物所在的貨架,通過攝像頭掃描二維碼的方式確定該貨架上的商品是否和采購者輸入的貨物一致。如果一致,就通過機械手臂將該貨物抓取并放入貨物斗中;如果不一致或貨架已空,則產生報警音,繼續去抓取下一個貨物。當所有的貨物采購完畢后,取貨小車將自動返回起始位置,等待采購者進行打包及付款操作。
1.2 存在的問題
無人超市購物小車在工作的過程中會持續不斷的抓取貨物到貨斗中,在這個過程中會出現以下問題:
1)由于貨物會增加小車的不平衡性及小車行進過程中的打滑現象,導致小車的行駛路線發生偏差,甚至碰到貨架出現事故,無法正確取到所有貨物。
2)小車在識別貨物時,由于超市內的光線或二維碼的角度問題,會導致識別失敗從而不能正確抓取貨物。
3)抓取貨物的機械手在放置貨物時,相同尺寸的貨物會越累積越高,在小車啟動時貨物由于慣性的作用會倒下并落在貨物斗以外的地面上。
1.3 現有解決方案
針對上述問題,目前有如下改進方案,但是可靠性并不高。
1)采用避障裝置,當小車要碰到貨架時使之向相反方向運動。該方案只能確保不出現碰撞事故,并不能保證行駛路線完全正確。
2)在掃描二維碼攝像頭處增加閃光燈,并進行多次識別。該方案可以彌補光線不足帶來的識別錯誤,并不能徹底解決二維碼角度不正帶來的識別錯誤。
3)人為干預,即遇到貨物掉落時,由管理人員撿起地上的貨物放入貨斗內。該方案隨可以解決貨物掉落問題,但是降低了無人超市的自動化程度。
2 基于TRIZ理論的無人超市購物小車設計
2.1 TRIZ理論
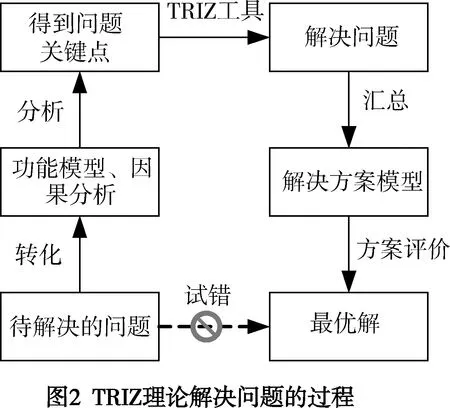
TRIZ理論是前蘇聯發明家、教育家G.S.Altshuller和他的研究團隊,通過分析大量的專利得到的一種解決發明創造問題的理論和工具,它提供了沖突解決理論和進化工具等原理及工具,能夠有效解決在設計過程中出現的矛盾[3]。TRIZ理論拋棄了工程應用中常見的試錯思想,從待解決的問題出發,通過建立系統的功能模型來進行因果分析,從而確定問題的關鍵點,然后經過對理想解及可用資源的分析,利用TRIZ工具得到多種解決問題的方案。最后通過對各種方案的可行性評估得到最優的解。基于TRIZ理論的發明問題解決過程如圖2所示。
2.2 問題分析
運用TRIZ理論解決無人超市購物小車問題時,首先要將系統中的元件按照制品、系統元件和超系統元件進行分類,如表1 所示。
根據系統分析中得到的各元件,按照TRIZ理論規定的功能描述方式繪制出系統的功能模型圖,如圖3所示。系統的功能模型圖展示了系統中所有元件間的功能關系,通過標準作用和有害作用來描述各元件間的相互作用。通過功能模型,可以找到四個有害作用:
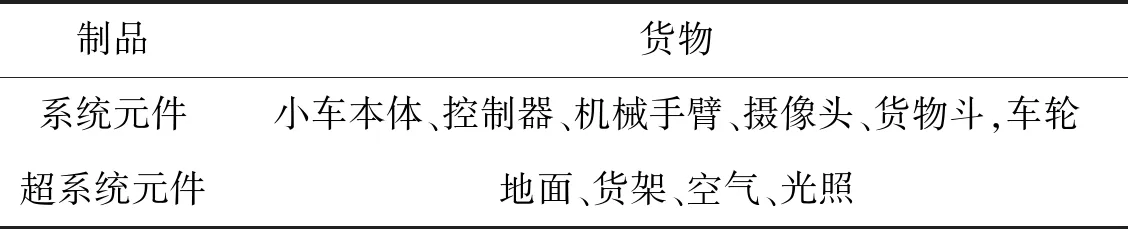
表1 系統分析
有害作用1:車輪在地面上行駛時會出現打滑現象。
有害作用2、3:空氣和光照條件會影響攝像頭的二維碼識別成功率。
有害作用4:貨物會從貨斗中掉落。
通過系統的功能模型中的有害作用來進行因果分析,如圖4所示。
通過對有害作用進行因果分析得到了解決問題的三個關鍵點:
問題關鍵點一:行駛時小車行駛路線產生偏差。
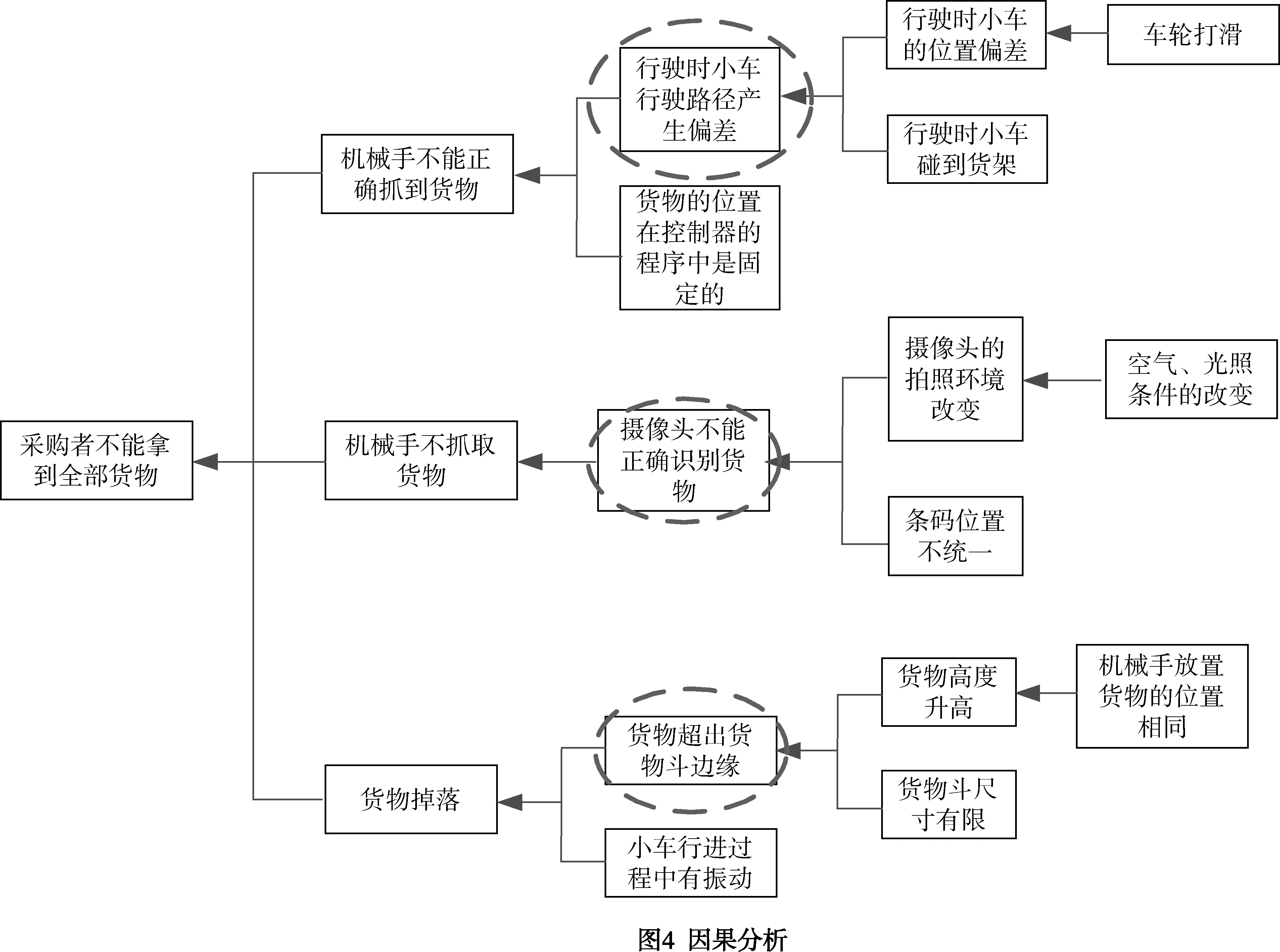
問題關鍵點二:攝像頭不能正確識別貨物。
問題關鍵點三:貨物超出貨物斗邊緣。
2.3 問題解決
針對因果分析得到的三個問題關鍵點,利用適合的TRIZ工具來解決問題。
1)問題關鍵點一:行駛時小車行駛路線產生偏差。
TRIZ工具:沖突解決理論。
為了修正行駛時小車的位置偏差,就需要在系統中增加糾偏裝置,但是增加糾偏裝置后會增加系統的復雜性。將糾偏裝置和增加系統的復雜性轉化成TRIZ標準沖突后,通過查找沖突矩陣可以得到如下發明原理。

表2 問題關鍵點一的矛盾分析
方案一:依據No.10(預操作)發明原理,得到解如下:
定義為軌道方案,在無人超市內部預先安裝有取貨車行走的軌道,使取貨車每次轉彎時都按照軌道的路線進行轉彎。
方案二:根據No.10(預操作)發明原理,得到解如下:
定義為磁導航方案,在無人超市的地面下,提前放置磁條;在小車內放置磁導航傳感器,通過磁力的作用,修正小車的位置,使小車始終行駛在有磁條的地方。
2)問題關鍵點二:攝像頭不能正確識別貨物。
TRIZ工具:進化分析。
步驟①:通過對先有的技術系統的進化過程進行分析[4],選擇技術進化定律“向復雜系統進化”。
無人超市采貨小車經歷了如下三個階段:
固定采購車(自動販賣機)—推車進行采貨(大型無人超市)—自動采貨(大型智能化無人超市)
步驟②:依據現有的技術系統的進化發展過程,選擇技術進化路線“增加部件的多樣性”。
固定采貨車(自動販賣機)—推車進行采貨(大型無人超市)—自動采貨(大型智能化無人超市)—人工智能自動采貨車(人工智能無人超市)
步驟③:按照選定的技術進化路線,判斷現有技術系統在進化路線上的位置,進而確定潛力狀態。
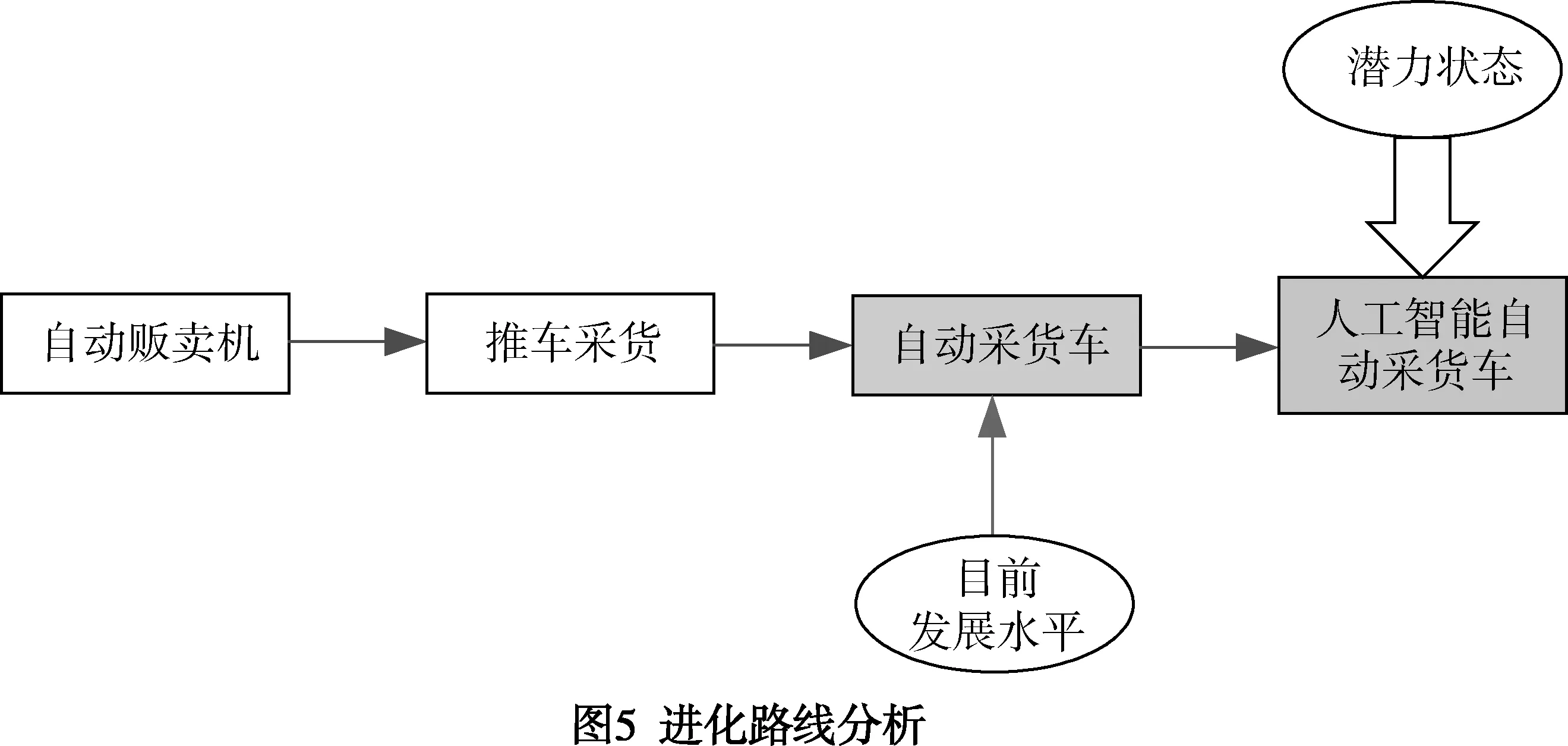
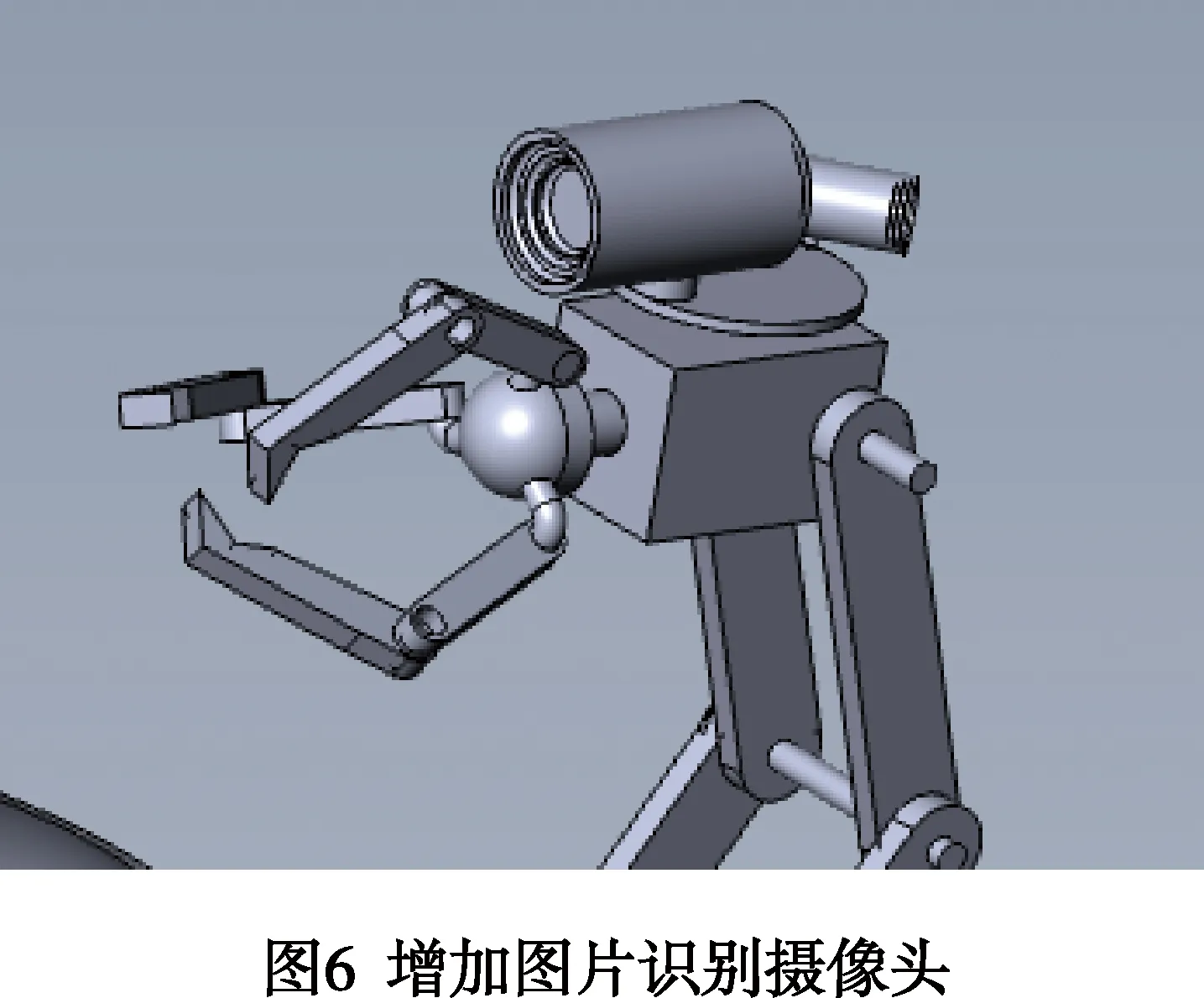
按照潛力狀態,得到解決方案三:定義為圖片識別方案,增加帶有圖片識別功能的攝像頭,可以在進行掃碼失敗時自動啟用,通過圖片比對的方式對貨物進行識別,如圖6所示。
3)問題關鍵點三:貨物超出貨物斗邊緣。
TRIZ工具:沖突解決理論。
為了使貨物能夠在貨物斗內穩定的存放,我們需要一個很大的貨物斗,使貨物不超過貨物斗的邊緣,但是這樣會增加貨物斗的尺寸。將穩定的存放和增加貨物斗的尺寸轉化成TRIZ標準沖突后,通過查找沖突矩陣可以得到如下發明原理。

表3 問題關鍵點三的矛盾分析
方案四:依據No.14(曲面化)發明原理,得到解如下:
定義為圓形貨斗方案,將貨物斗的底面做成球面,當貨物被放到貨物斗內會自動尋找平衡點,使多個相同的貨物在同一點被放下時,不會再進行高度上的累加,如圖7所示。
方案五:依據No.24(中介物)發明原理,得到解如下:
定義為振動方案,在貨物斗內安裝振動裝置,在每次放置貨物后啟動振動裝置,使貨物斗內的貨物進行重新布局,防止高度累加。
2.4 最優解確定
對上述四個方案從技術難度、操作難度和成本三個方面進行評價[5],得到方案評價表,如表4所示。
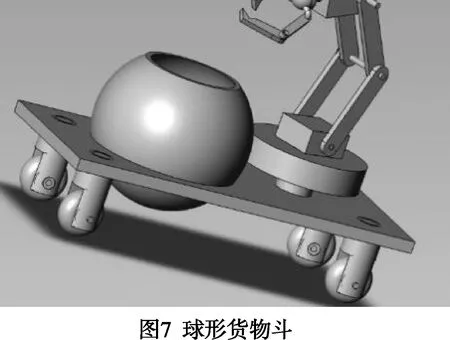
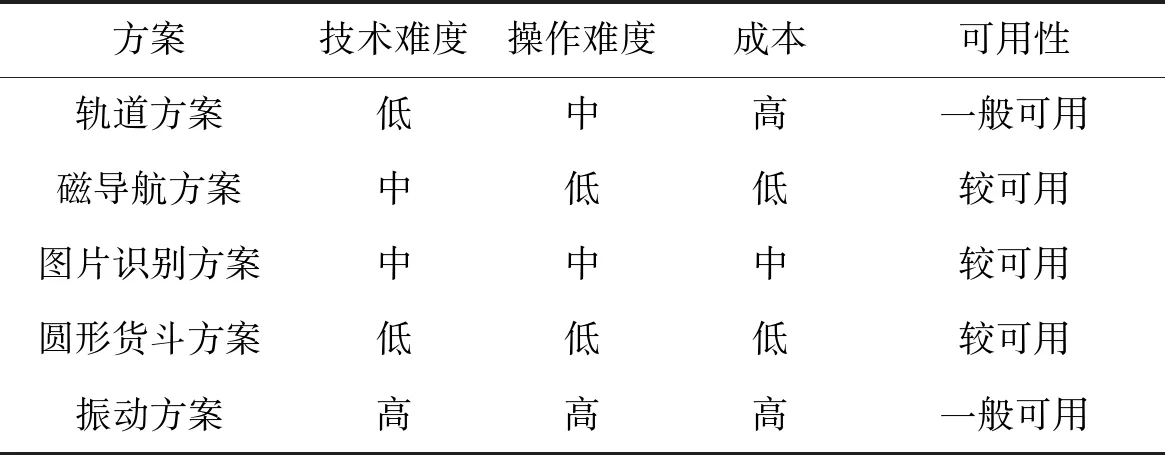
表4 方案評價與可用性分析
根據表4中對所有解決方案的評價與可用性分析,結合購物小車及無人超市內部的具體環境要求,得到的最優解為:
在無人超市內安裝磁條,在取貨車上安裝磁導航,使小車可以無偏離行駛,使機械手能夠正常抓取到貨物;在小車上增加帶有圖像識別的攝像頭,當掃碼失敗時利用圖像識別進行貨物確認;將貨物斗的底面做成球面,使貨物在貨物斗內擺放時高度降低,防止掉落貨物斗外。
3 結語
本文根據無人超市購物小車現存的問題運用TRIZ理論進行了創新方案的設計:對小車進行系統分析、建立功能模型及因果分析,并在因果分析的基礎上得到了解決問題的三個關鍵點。根據沖突解決理論與進化工具得到了五種解決方案,最后通過對五種解決方案進行評價與可用性分析,得到了最優解。TRIZ理論提供的工具可以在設計過程中發現并解決出現的矛盾,是一種科學有效的創新設計方法。
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
中學生數理化·中考版(2022年12期)2022-02-16 07:36:56
今日農業(2021年8期)2021-11-28 05:07:50
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
中國衛生(2014年2期)2014-11-12 13:00:16