
電力電子變流技術中的三相電壓型PWM可控整流器研究
2022-01-10 08:08:46高有清
無線互聯科技 2021年21期
崔 紅,高有清
(1.遼寧省交通高等專科學校,遼寧 沈陽 110122;2.沈陽光大環保科技股份有限公司,遼寧 沈陽 110026)
0 引言
在工業領域的許多場合,需要變流器進行電能變換,如高速電機的功率變換系統。但傳統的電能變換方式會對電網造成較大的諧波污染。將PWM技術應用到整流器中,能夠達到減小諧波的目的。隨著新型電力電子器件的開發,先進控制算法的應用,使PWM整流器的性能逐步提升。
1 三相電壓型PWM可控整流器的電路結構
PWM可控整流器通常分為兩類:電流型和電壓型。與電流型PWM可控整流器相比,電壓型PWM可控整流器具有結構簡單、控制方便的特點。三相電壓型PWM可控整流器電路結構如圖1所示。
圖1中,ua,ub,uc表示三相電網電壓,ia,ib,ic表示三相輸入電流,La,Lb,Lc表示交流側濾波電感,RLa,RLb,RLc表示濾波電感的等效內阻,Cdc表示直流側的濾波電容,VT1~VT6表示可控整流器的6個功率開關器件,R0表示負載電阻,EL表示直流電動勢,id為母線側電流,0表示電網的中性點,N表示下橋臂的節點。三相電壓型PWM可控整流器拓撲結構具有輸入交流側諧波小、輸出直流側電壓穩定的特點,適合在大功率的場合應用。
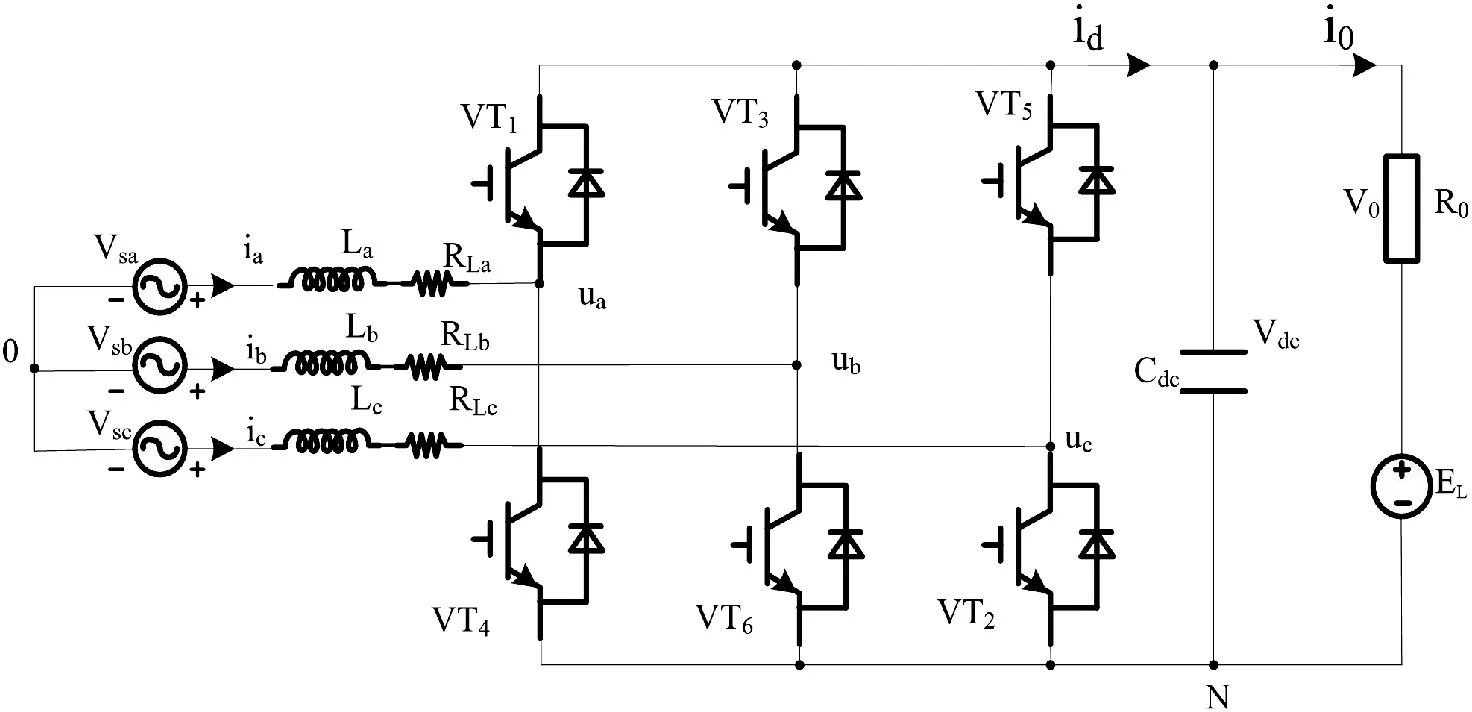
圖1 三相電壓型PWM可控整流器的電路結構
2 三相電壓型PWM可控整流器的原理分析
根據三相電壓型PWM可控整流器的電路結構,通過對功率開關器件VT1~VT6進行PWM控制,由于電感的存在,交流側電流不能突變,能夠使電流波形接近于正弦化[1]。而且,能夠跟蹤交流側電壓波形的變化,使功率因數接近于1。開關頻率越高,電流波形越接近于正弦。通常用空間矢量描述整流橋的開關狀態。每一相橋臂有兩種開關模式,上橋臂導通、下橋臂關斷用1表示,下橋臂導通、上橋臂關斷用0表示。三相PWM整流器共有(000-111)8種工作狀態,其中包括6種非零狀態矢量(001-110)和2種零狀態矢量(000)和(111)。
3 三相電壓型PWM可控整流器的數學模型
為便于建立三相ABC靜止坐標系下的數學模型,做以下假設:(1)電網電壓三相平穩對稱;(2)功率開關器件是理想開關,無開關損耗;(3)網側電感是線性濾波電感;(4)直流側負載由電阻和反電勢串聯等效。
開關函數分別定義為Sa,Sb,Sc,上、下橋臂的邏輯關系相反。上、下橋臂通斷狀態分別用1和0表示,上橋臂通為1,下橋臂通為0。


從式(6)可知,在三相ABC靜止坐標系下,三相電流ia,ib,ic相互耦合,需要對ia,ib,ic進行解耦。為了有利于控制系統設計,可以將三相ABC靜止坐標系通過坐標變換轉換成同步旋轉dq坐標系。
4 三相電壓型PWM可控整流器控制器的設計
對于高速電機的功率變換系統,為了減小電流諧波對高速電機產生的影響,設計合理的PWM可控整流器控制器非常重要。
三相電壓型PWM可控整流器控制器通常采用雙閉環控制策略。電壓外環可控制三相整流器的母線電壓,電流內環可按照外環的電流指令控制電流,實現高功率因數的電流控制。電壓電流雙閉環控制結構如圖2所示。
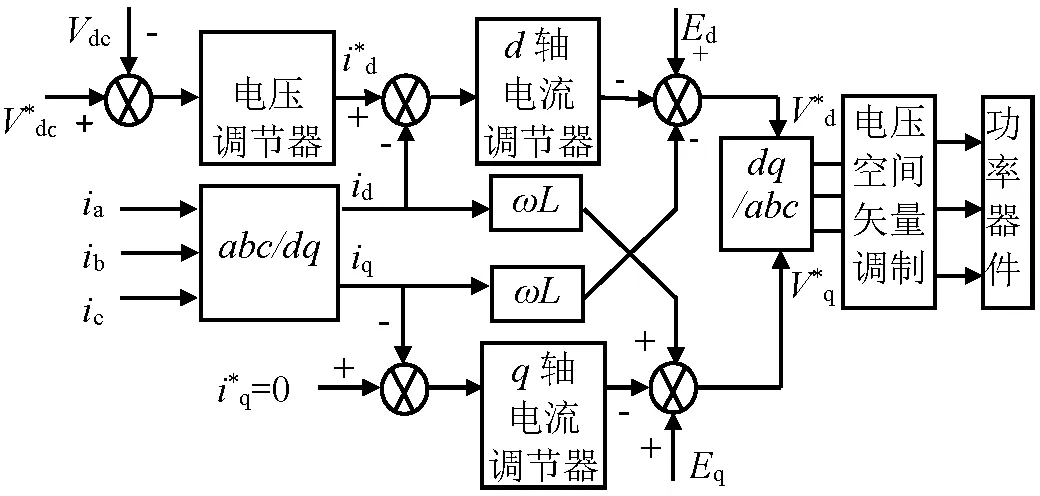
圖2 電壓電流雙閉環控制結構
5 系統仿真
基于Matlab/Simulink仿真平臺搭建了三相電壓型PWM可控整流器系統的仿真模型[2]。仿真參數為:輸入電壓(線電壓)為380V,輸入電壓頻率f=200 Hz,輸出直流電壓U= 600 V,直流母線電容C=2 200 μF,濾波電感L=5 mH,串聯 5 Ω電阻,采樣頻率為10 kHz,直流電源電壓為300 V。三相電壓型PWM可控整流器直流側輸出電壓波形如圖3所示。網側相電壓和相電流波形如圖4所示。
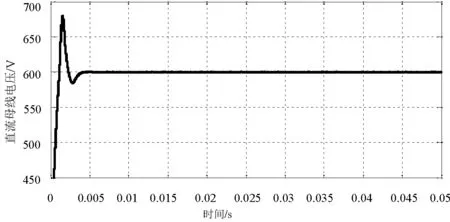
圖3 整流時直流母線電壓波形
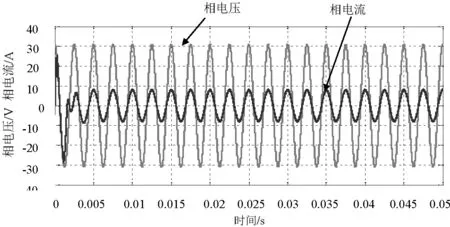
圖4 相電壓和相電流波形
由仿真結果可知,整流器直流側的母線電壓在經過小幅度的超調后穩定在設定值,網側相電流和相電壓的相位基本相同,網側功率因數接近于1。表明三相PWM可控整流器的諧波抑制能力很強。
6 結語
對于高速電機功率變換系統,研究了三相電壓型PWM可控整流器的電路結構、工作原理、數學模型以及三相電壓型PWM可控整流器控制器的設計,對三相電壓型PWM可控整流器系統進行了仿真研究[3]。仿真結果說明,整流器輸出側的直流電壓穩定,網側相電流的相位能夠較好地跟隨相電壓的相位,采用三相電壓型PWM可控整流器具有很強的諧波抑制能力,能夠提高系統的控制精度。
