用于實踐教學的防夾汽車關窗器設計
2022-02-18 21:54:22許師中蘭靛靛方遒
時代汽車 2022年3期
關鍵詞:實踐教學
許師中 蘭靛靛 方遒



摘 要:針對學生學習汽車電器實踐課程內容提升需求,對車窗電機的工作電流信號進行處理,利用電流紋波的周期信號與電流值,設計制作具有防夾功能的開放性汽車關窗器實驗裝置,可以使學生得到比課本更深入、更直觀的車窗防夾知識。
關鍵詞:電動車窗 防夾 實踐教學
1 引言
根據美國交通部針對電動車窗系統的法規FMVSSll8要求,以及我國的規定[1]要求從2012年開始,使用電動玻璃升降器的新增車輛應該具有防夾功能,所以目前國內小車基本采用防夾電動車窗。按照防夾要求,升窗過程在防夾區域遇到100N阻力時,應啟動防夾處理程序。這樣的表述對于學生學習、理解防夾參數比較抽象,若能通過示波器觀察車窗電機工作時與標準要求對應的相關電流參數,就比較容易理解車窗防夾機理,并能正確使用電動車窗。
《汽車電器與電子技術》理論課對“電動車窗”介紹不涉及防夾功能方面的知識,實踐課程中“電動車窗”模塊僅要求控制線路的連接,這些比較簡單。因此,設計一個實驗裝置,方便示波器觀察、測量車窗電機工作過程的電參數,并根據需要,方便在線修改控制程序及控制參數,可以滿足學生擴展電動車窗模塊知識深度和廣度需求。
2 電動車窗防夾主要檢測方式
目前電動車窗的防夾主要有三種檢測方式:
①電流防夾判斷:根據電機轉動阻力與電流大小接近線性關系進行判斷,當電機電流持續一段時間內大于某個數值又小于堵轉電流時,視為遇阻需要防夾。該方法成本低,但因電流紋波的影響,對電流值采樣不夠準確,只能粗略地進行判斷。
②霍爾傳感器防夾判斷:安裝在電機上的2個或2個以上霍爾傳感器在電機轉動時,產生的方波轉速信號能準確定位車窗的位置,同時電機轉速即霍爾傳感器輸出的方波信號周期與所受阻力接近反比例關系,因此,利用霍爾傳感器方波信號周期變化情況判斷是否需要防夾處理[2][4]。該方法成本較高,防夾反應速度比電流防夾方式慢,但控制較為穩定,抗干擾能力強。
③霍爾傳感器與電流結合防夾判斷:測量電機工作電流大小,結合霍爾傳感器輸出轉速信號,可以準確進行防夾判斷[3][4]。
3 設計方案概述
本方案利用檢測電機的電流值、電流紋波周期相結合的方法設計防夾汽車關窗器。有刷直流電機在換相過程中會產生電流紋波,紋波個數與電機轉速和換向片的數量成比例關系,只要電流紋波經整形成方波信號,即可替代霍爾傳感器的方波信號,能準確、快速地進行車窗防夾判斷、控制[5][6],也可增設學習功能,方便車窗防夾的調校。
圖1是霍爾傳感器信號與電流紋波信號比較,可以看出電流紋波頻率是霍爾信號頻率的10倍,電流紋波的頻率比霍爾傳感器的輸出頻率更高,那么控制系統判斷時間更短。根據采用的防夾算法用時計算,此方法大約只占用霍爾傳感器輸出一至二個方波信號時間,也就是說在車窗同時夾物后,霍爾傳感器得到第一個防夾數據時,基于紋波的檢測方法已經得到10個防夾數據,已經完成了防夾的判斷,并且進行防夾處理了。可見電流紋波的檢測方式處理速度比霍爾傳感器更快。
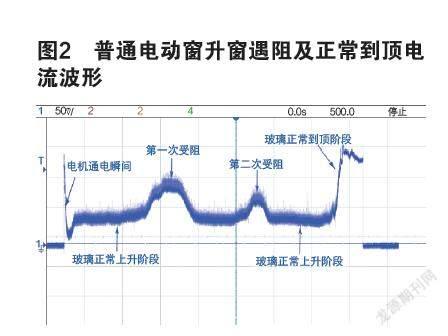
本套車窗防夾系統采用的電流紋波——方波轉化模塊是關鍵技術電路。一般硬件的波形變換電路只在電流值變化平緩時可以正常地把近似交流信號轉化成方波信號,但在電機電流陡升階段很難把紋波信號轉化成方波信號,如圖2中電機通電瞬間、受阻上升和正常到頂階段的電流紋波信號就不容易轉化成方波信號,所以常用方法是采用性能較好的MCU進行軟件算法處理后得到電流紋波周期[7]。
方案采用純硬件電路模塊處理后,即使電流陡升或陡降階段均可以得到電流紋波的方波周期信號[5]。這僅使用普通MCU,不需要大量算法處理,簡化了數據處理難度,適合絕大部分學生的知識和能力水平,并且可提高防夾反應速度。我們基于這兩個信號及其特點,設計其余硬件電路,引出電機電流信號、方波信號供示波器觀察使用,并優化防夾處理算法和軟件抗干擾方法,即可實現準確的防夾判斷處理、實用直觀的實踐教學功能。
4 系統組成
4.1 硬件部分
硬件部分分為:單片機系統電路、信號檢測與電機驅動電路兩部分。圖3為原理框圖,圖4為實物圖,分別為兩塊PCB板,兩板用數據線相連,可以靈活跳線。信號檢測與電機驅動電路板可以匹配多種品牌和系列的MCU,MCU系統電路板可以自己設計,也可以外購現成最簡系統板,這種設計應用于實踐教學,具有很好的拓展性和開放性。
4.1.1 單片機系統電路
單片機系統采用HT66F70A單片機作為主控芯片的最簡系統電路,含有按鍵控制識別、數據測量及車窗電機控制信號的產生等功能,具有在線編程,或直接修改控制參數功能。
4.1.2 信號檢測與電機驅動電路
信號檢測與電機驅動電路具有電流信號、外部控制信號檢測和升窗電機的驅動功能。
在ACC處于OFF狀態下,系統檢測到中控鎖落鎖信號后,電機驅動電路根據單片機系統輸出的信號,控制繼電器給車窗電機供電,電機的工作電流經過10 mΩ的取樣電阻轉化為電壓信號,利用差分放大電路對電壓信號進行放大。放大后的信號分三路輸出,第一路直接送到板外測試口,用于示波器觀察電流波形;第二路信號經過紋波平滑電路送到HT66F70A的A/D端口進行模數轉換,通過簡單運算,可得到電機的電流值;第三路信號經過低通濾波后,送到紋波---方波轉化電路,把電流紋波信號轉化成方波信號,再送到HT66F70A的外部中斷端口進行頻率檢測,同時把方波信號輸出板外測試口,用示波器觀察變換后的方波信號。
單片機系統根據檢測的電流參數控制電機驅動電路實現電機正轉、反轉、停止等動作,完成關窗動作后,最后模塊自動斷電。
4.2 軟件部分
根據防夾方案,應用程序主要由學習模式與正常工作模式兩部分構成,并包含抗1 kHz 以上干擾頻率等處理功能,軟件流程如圖5所示。
4.2.1 防夾算法簡述
防夾與正常升頂的判斷涉及關窗器工作的可靠性,是整個系統的關鍵。利用已有的電流值和方波信號,還需采用合理的算法,才能明顯減少系統的誤判。
車窗正常升頂與受阻升窗時(圖2),電流值與紋波幅度都增大,但電流/時間的斜率是不同的,正常升頂的斜率較大,即電流紋波周期變化較大;受阻狀態的斜率較為平緩,即受阻狀態下電流紋波周期變化緩慢,如圖6所示的遇阻防夾處理波形,這正是我們區分正常到頂與上升過程受阻的判斷依據。
根據設計的硬件特性,可以對電流紋波——方波轉換模塊轉換出來的方波信號與電流紋波的特定相位進行精確采樣,使方波的下降沿對應紋波電流的峰值處,單片機可利用下降沿中斷觸發對電流峰值采樣。
4.2.2 運行模式簡述
系統通電后,有兩種工作模式:學習模式與正常工作模式。
①學習模式:在進入學習模式后,系統測量車窗防夾起始點后的幾個數據:正常上升過程、外掛重物時上升過程不同狀態下的工作電流、電流紋波周期,以及正常升窗時電機堵轉前幾個電流紋波周期和對應電流值,保存在MCU內作為參考值。
②工作模式:車窗玻璃上升時,系統同時檢測電流值和紋波周期。在電流達到防夾閾值后,若紋波周期迅速變大,且周期大于50 ms 即可判斷正常到頂,電機快速斷電;當紋波周期變化相對緩慢時,可以判斷是遇到阻力,需要防夾處理,這時單片機系統需要控制電機反轉1秒(或根據實際需要),延遲一段時間后,重新進入關窗程序,最后完成關窗動作,并自動切斷關窗器系統供電。
4.2.3 軟件抗干擾設計
系統抗干擾設計應考慮軟、硬件配合設計,以提高整個系統抗干擾能力。軟件抗干擾處理從以下三個方面進行:
①車窗電機在起動的瞬間(參見圖6),電流遠大防夾電流閾值,不需電流采樣,因此在電機起動延時50ms后,單片機才開始對車窗電機進行電流采樣。
②對1KHz以上干擾頻率的濾除處理:因為電流紋波頻率不會超過1KHz,因此1KHz以上的信號是干擾信號,將周期低于1ms的采樣點濾除不做A/D轉換,只做時間累加。
③從觸發防夾電流閾值后2~3個周期開始,計算N個周期內,電流變化量與時間的比例系數。這種算法以數據量多的方式能極大的減小因局部擾動而造成整體的誤差。
5 結語
本實驗裝置拓展實驗教學內容廣度和深度,同時提高學生學習興趣,受到學生的歡迎和好評。在學生完成《汽車電器與電子技術實訓》課程的“電動車窗”模塊控制電路連線后,增加本實驗裝置演示內容,利用示波器觀察電機正常工作、升窗遇阻過程的電流波形變化情況,可以清楚觀察到電機通電瞬間以及到頂堵轉時的電流都很大,車窗電機中間工作狀態電流也比較大,這些可以使學生知道電動車窗的正確使用方法:正常使用時避免電動窗頻繁啟停,以免造成電機過熱失靈或損壞;應當避免多扇車窗同時工作,以免模塊供電線路因工作電流劇增出現故障。通過遇阻電流波形與到頂電流波形的比較,用定量、嚴謹的數據使學生更容易理解防夾電動車窗的工作原理和防夾處理方法。
因為采用單片機系統板、信號檢測與電機驅動電路板兩片獨立PCB板設計模式,單片機系統板可以根據需要靈活配置具有在線編程接口,對于學有余力、單片機基礎知識比較好、動手能力較強的學生,也可以自己編寫控制程序或者修改控制參數,從而出現不同防夾效果,深入探索防夾電動車窗關鍵參數和防夾算法的優化方法。
基金項目:廈門理工學院校級教育教學改革研究項目(項目編號:JG2019004)。
參考文獻:
[1]國家質檢總局、國家標準化管理委員會.GB 11552-2009乘用車內部凸出物[S].北京:中國標準出版社出版.2010年.
[2]馬偉澤,張申科,汪宏杰.采用霍爾傳感器的汽車電動車窗防夾設計[J].汽車工程,2008,30(12):1122-1124.
[3]Freescale Semiconductor,Inc.? Anti-Pinch Window Lift Reference Design [DB/OL]. http://cache.freescale.com/files/microcontrollers/doc/fact_sheet/RDS12VRFS.pdf?fpsp=1.
[4]吳志紅,陳雅瑩,朱元等.車窗防夾算法的探究和實[J].電子產品世界,2009(1):88-90.
[5]許師中.基于電流紋波純硬件波形轉化的車窗防夾設計[J].廈門理工學院學報,2014,(2)2,P11-16? 1673-4432.
[6]涂超平,劉幸輝等.基于 AutoChipsAC781 xMCU 的車窗紋波防夾系統設計[J].中國集成電路 2021 (3)61-65,77.
[7]王凡.電動車窗防夾系.電流紋波算法研究[J].電子技術與軟件工程.2020,(12)83-84.
猜你喜歡
中國科技博覽(2016年19期)2016-10-19 14:32:01
中國市場(2016年35期)2016-10-19 03:11:23
中國市場(2016年35期)2016-10-19 02:58:48
科技視界(2016年21期)2016-10-17 17:25:51
考試周刊(2016年79期)2016-10-13 23:35:16
考試周刊(2016年79期)2016-10-13 23:26:02
大學教育(2016年9期)2016-10-09 08:49:28
大學教育(2016年9期)2016-10-09 08:46:17
大學教育(2016年9期)2016-10-09 08:34:10
大學教育(2016年9期)2016-10-09 08:17:37
