一種小型三輪電動車后懸掛新型結構設計及仿真
2022-02-19 10:12:26饒道龔楊三龍李廣平楊利利李乾王維鏑
機械工程師 2022年2期
饒道龔,楊三龍,李廣平,楊利利,李乾,王維鏑
(浙江大學臺州研究院,浙江 臺州 318000)
0 引言
由于我國道路交通環境的特殊性,在道路交通參與者中,存在著數量龐大的電動兩輪車、小型電動三輪車。電動車在方便人們出行的同時,速度快、質量大、種類繁多的兩輪、三輪電動小型車輛的駕駛的舒適性和安全性也引起了社會的重視[1]。市場上電動車后懸掛設備種類少,尤其是小型三輪電動車后懸掛結構單一,減振效果差。現有的電動車后橋雙擺臂機構存在著結構不穩定、使用壽命短、安全性不高的缺陷,市場對電動車后懸掛新型機構的需求迫在眉睫。
考慮到三輪電動車的舒適性和安全性,浙江大學臺州研究院研發了一套三輪電動車后懸掛結構,使用該后懸掛的三輪電動車具有承載力適中、道路適應力強、轉向平穩并能夠保證3個車輪始終接觸地面、行駛更加平穩等優點。
同時該小型三輪電動車后懸掛新型結構還能帶動三輪電動車行業的同步發展及產品升級。
1 電動車后懸掛整體結構及工作原理
該三輪電動車后橋雙擺臂懸掛機構的2個擺動臂可在旋轉機構的作用下相對于后橋橋架上下偏擺,保證2個后車輪的軸完全平行,保證三輪電動車的3個車輪始終接觸地面,增加了輪胎的接地總面積,提供平穩、舒適、安全的駕乘體驗,行駛更為安全。
1.1 整體機構組成
研發了一種三輪電動車后懸掛結構,屬于機械運動技術領域。該三輪電動車后懸掛擺動結構主要包括旋轉機構、擺動機構和緩沖器機構。通過旋轉機構和擺動機構之間的配合與相互作用來達到其運動要求。該結構具有穩固、安全省力等優點。
通過SolidWorks建立后懸掛結構三維模型,如圖1所示。
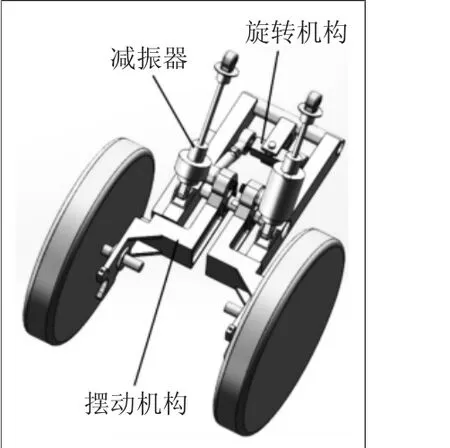
圖1 后懸掛結構三維模型
后懸掛結構詳細結構及部件組成如圖2所示。
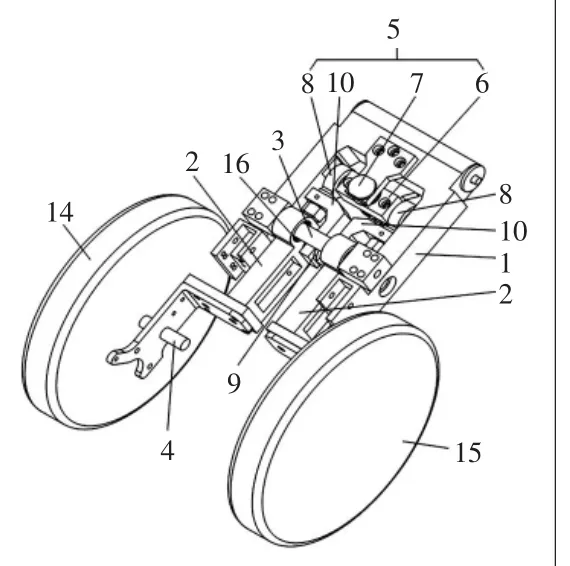
圖2 后懸掛結構組成
1.2 后懸掛機構工作原理
該后懸掛機構包括后橋橋架、對稱設置在后橋橋架兩側的2個擺動臂,2個擺動臂上分別安裝有后車輪;后橋橋架上設有臺階軸,各擺動臂可旋轉地套設于臺階軸上;后橋橋架與2個擺動臂之間安裝有旋轉機構,當三輪電動車轉彎時,旋轉機構使2個擺動臂相對于后橋橋架偏擺,其中一個擺動臂相對于后橋橋架繞臺階軸向上運動,另一個擺動臂相對于后橋橋架繞臺階軸向下運動。本結構2個擺動臂可在旋轉機構的作用下相對于后橋橋架上下偏擺,從而保證2個后車輪的軸完全平行,保證三輪電動車的3個車輪始終接觸地面,增加了輪胎的接地總面積,提供平穩、舒適、安全的駕乘體驗。
2 后懸掛結構載荷計算
當三輪電動車后輪一側行駛在顛簸路面或凹坑處時,2個擺臂會上下擺動,2個后車輪極限相差高度為125 mm。此時易出現單側受力的極限情況,本文以此工況為研究對象,如圖3所示,計算出后懸掛結構擺動臂所受載荷。
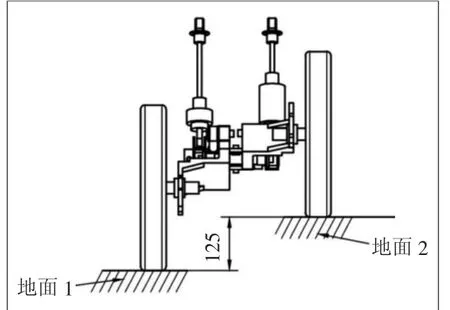
圖3 極限行駛工況
靜力學的求解必須先在三維空間里面建立坐標系[2],以左側輪胎中心為原點,建立坐標系為{0},極限工況假設左側后輪胎單獨受力,負載通過緩沖器對后懸掛結構加載,受力分析如圖4所示。
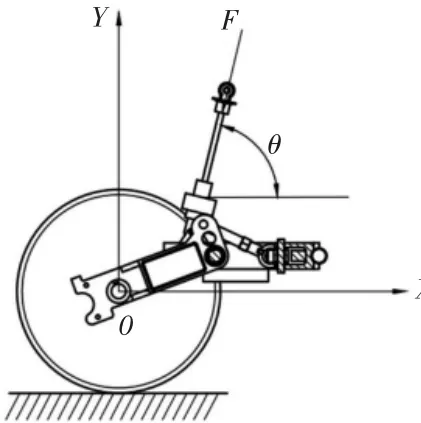
圖4 左側后輪胎單獨受力分析
以后懸掛結構為研究對象,進行載荷計算。
根據車體負載及擺動力臂,計算出后懸掛結構所受的彎矩:

式中:F為人和車體質量,取300 kg;L為減振器中心到連接鉸點的距離,為80 mm。
由于減振器的水平安裝夾角為θ,對后懸掛產生2個方向的彎矩:

式中:θ為減振器的水平安裝夾角,75°。
單側輪胎受力工況下,后懸掛結構載荷計算結果如表1所示。

表1 后懸掛結構載荷計算結果
3 靜力學分析及優化
有限元法是將整體結構劃分成有限個規則的網格,通過對每個網格的求解從而近似得到整體結構的解。在有限元法中利用靜力學對機器人關鍵零部件進行結構分析,即關鍵零部件在方向和大小不變的載荷作用下承受的應力和應變,從而達到對零部件結構優化和改進的目的[3-4]。
該后懸掛結構采用普通碳鋼Q235,材料性能如表2所示。

表2 后懸掛結構材料性能參數[5]
對后懸掛結構模型進行靜力學分析。將在SolidWorks中建立的懸掛模型導入ANSYS Workbench 軟件中。Workbench利用ANSYS計算內核,具有裝配體自動分析、自動網格劃分等參數優化工具,為設計者提供了極大的便利[8]。
3.1 擺動臂靜力學分析
將后懸掛輪胎和緩沖器及連接螺栓墊片簡化掉,將簡化后懸掛結構幾何模型導入ANSYS Workbench 軟件中,對其進行網格劃分,如圖5所示。
3.2 仿真結果分析
按照第2節計算的載荷,對整個后懸掛結構施加2個方向的彎矩。對有限元模型進行加載、求解,查看其位移及應力結果云圖,如圖5所示。后懸掛結構靜力學仿結果如表3所示。
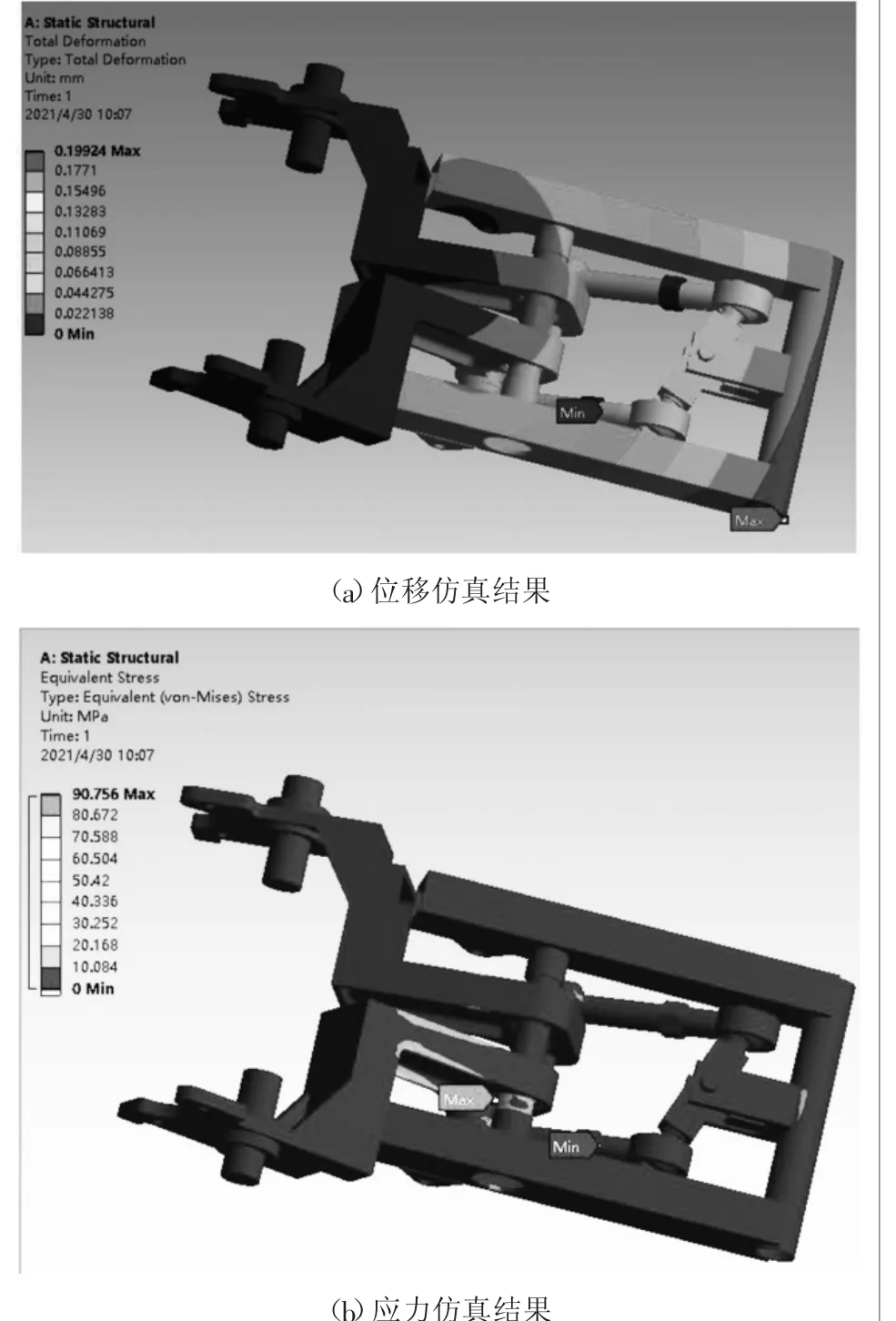
圖5 第4關節分析結果
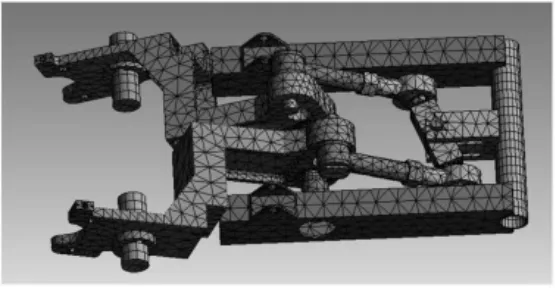
圖5 后懸掛結構網格劃分

表3 后懸掛結構靜力學仿真結果
Q235材料許用應力為

式中:σs為材料屈服強度,Q235材料屈服強度為235 MPa;n為安全系數(n=1.5~2.5),n取2。
Q235材料許用應力為117 MPa,后懸掛結構最大應力在擺臂軸孔處,應力值為90.76 MPa,未超過許用應力,滿足強度和剛度要求。
4 結論
通過本文研究,考慮到三輪電動車行駛的安全性和舒適性,開發設計了一套三輪電動車后懸掛新型結構,具體總結如下:
1)詳細介紹了小型三輪電動車后懸掛機構及工作原理。后懸掛結構2個擺動臂可在旋轉機構的作用下相對于后橋橋架上下偏擺,從而保證2個后車輪的軸完全平行,保證電動三輪車的3個車輪始終接觸地面。
2)電動車行駛在顛簸的路況上,單側輪胎受力的情況下,對后懸掛結構進行彎矩載荷分析和計算。
3)對后懸掛新型結構進行靜力學分析,驗證其設計的結構強度和剛度均滿足正常使用要求,驗證了本設計結構的可行性。
同時,本文也為三輪電動車后懸掛結構設計和仿真分析提供了參考依據。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
現代企業(2015年9期)2015-02-28 18:56:50
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
