激光測風雷達風場探測性能評估
2022-02-23 10:26:36趙文凱趙世軍單雨龍孫學金
中國測試 2022年1期
關鍵詞:風速
趙文凱,趙世軍,單雨龍,孫學金
(國防科技大學氣象海洋學院,江蘇 南京 211101)
0 引 言
大氣風場作為一項重要氣象要素,與人們的生產生活息息相關,對大氣風場進行精準探測越來越受到人們的重視。現有測風手段雖能滿足基本測風需求,但均存在明顯不足。激光測風雷達作為新型測風設備,利用多普勒原理[1]獲取風向、風速信息,具有能夠探測晴空風場、測風范圍廣、探測精度高、時空分辨率高、機動性能好的優點,其在風場精準探測領域具有重要應用前景。
激光測風雷達按照探測方式可分為相干激光測風雷達和非相干激光測風雷達,本研究所用激光測風雷達為相干探測方式。目前國外許多國家已經成功研制出相干激光測風雷達系統。1970年,美國雷神公司研制出世界上第一臺脈沖相干激光測風雷達[2];1987年,斯坦福大學研發出波長為1.06 μm的相干激光測風雷達,實現了600 m范圍的風場探測[3]。1988年,美國相干技術公司(CTI)增強了激光測風雷達的風場探測能力,研發出可對3.75 km的水平風場進行探測的激光雷達[4];1990年,美國的Henderson課題組研制的相干激光測風雷達系統,風場探測范圍進一步擴大,可實現水平距離20 km范圍的風場探測[5];2001年,日本三菱電器公司研制出世界上第一臺1.54 μm波段的相干激光測風雷達[6],該激光雷達系統采用光纖通信技術,提升工作效率的同時,也降低了成本;2002年,美國Lockheed Martin公司研發出波長為2.0 μm的WindTracer商用相干激光測風雷達系統[7],進一步保證了激光對于人眼的安全。
國內對激光測風技術的研究起步較晚。近年來,國內在激光測風雷達的研制方面取得了較快發展。2010年,中國電子科技集團公司第二十七研究所研制出波長為1.5 μm的激光測風實驗裝置[8],空間分辨率為 50 m,室外速度分辨率 1 m/s[9],實現了 200 m的風速測量;2011年,西南技術物理研究所研制出1.55 μm全光纖相干激光測風雷達,可探測5~200 m范圍內的大氣風場[10];2012年,中國科學院上海精密光學機械研究所研制了1.539 μm全光纖相干激光測風雷達[11],在2014年進行升級后,風場探測能力得到增強,可實現3 km的風場探測;2014年,中國海洋大學研制了1.55 μm全光纖相干激光測風雷達[12],并推出了商用的WindPrint系統。2017年,中國科學技術大學研制出相干多普勒測風激光雷達[13],采用5 kHz重復頻率工作時,可以實現水平距離6 km的大氣風場。
實驗中使用的激光測風雷達為相干脈沖機制,激光器工作波長為1.55 μm,可探測垂直高度上30~1000 m范圍內的風向風速,風速測量允許誤差±0.3 m/s,風向測量允許誤差±2°,具有高精度、高分辨率、大探測范圍等優點。
未來,激光測風雷達將進入氣象業務系統,作為以氣球軌跡法空中風測量方式的補充或升級。在激光測風雷達投入業務應用之前,需對其測風數據的可靠性進行評估,對其在不同天氣條件下的工作性能進行分析。目前激光測風雷達測風性能評估的難點在于真實風場難以獲得。本文從氣象業務應用的需求出發,將探空氣球風場數據作為真值,區分不同天氣條件、不同高度區間、不同風速區間對激光測風雷達的風場數據有效性進行分析,據此評估激光測風雷達的風場探測性能。
1 激光測風雷達垂直風場反演原理
激光測風雷達將大氣中的氣溶膠粒子作為探測對象,通過接收氣溶膠粒子對于激光的散射回波,計算多普勒頻移,從而得到氣溶膠粒子的運動速度,根據氣溶膠的運動反演大氣風場。目前,激光測風雷達垂直風場數據產品主要是根據速度方位顯示(velocity azimuth display, VAD)掃描及與之對應的VAD算法反演獲得。激光測風雷達VAD掃描如圖1所示,掃描時激光雷達保持固定的仰角,通常仰角較大,方位角改變360°,激光光束的掃描面構成一個圓錐面。
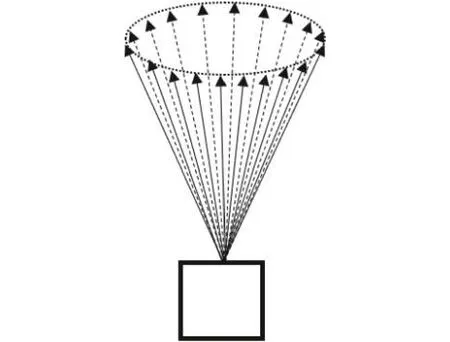
圖1 激光測風雷達VAD掃描示意圖
VAD算法的中心思想是將大氣中氣溶膠粒子的運動速度分解為水平方向上的運動速度vh,和垂直方向上的運動速度vf。算法原理如圖2所示,以正北方向為x軸的正向,正東方向為y軸的正向建立直角坐標系。
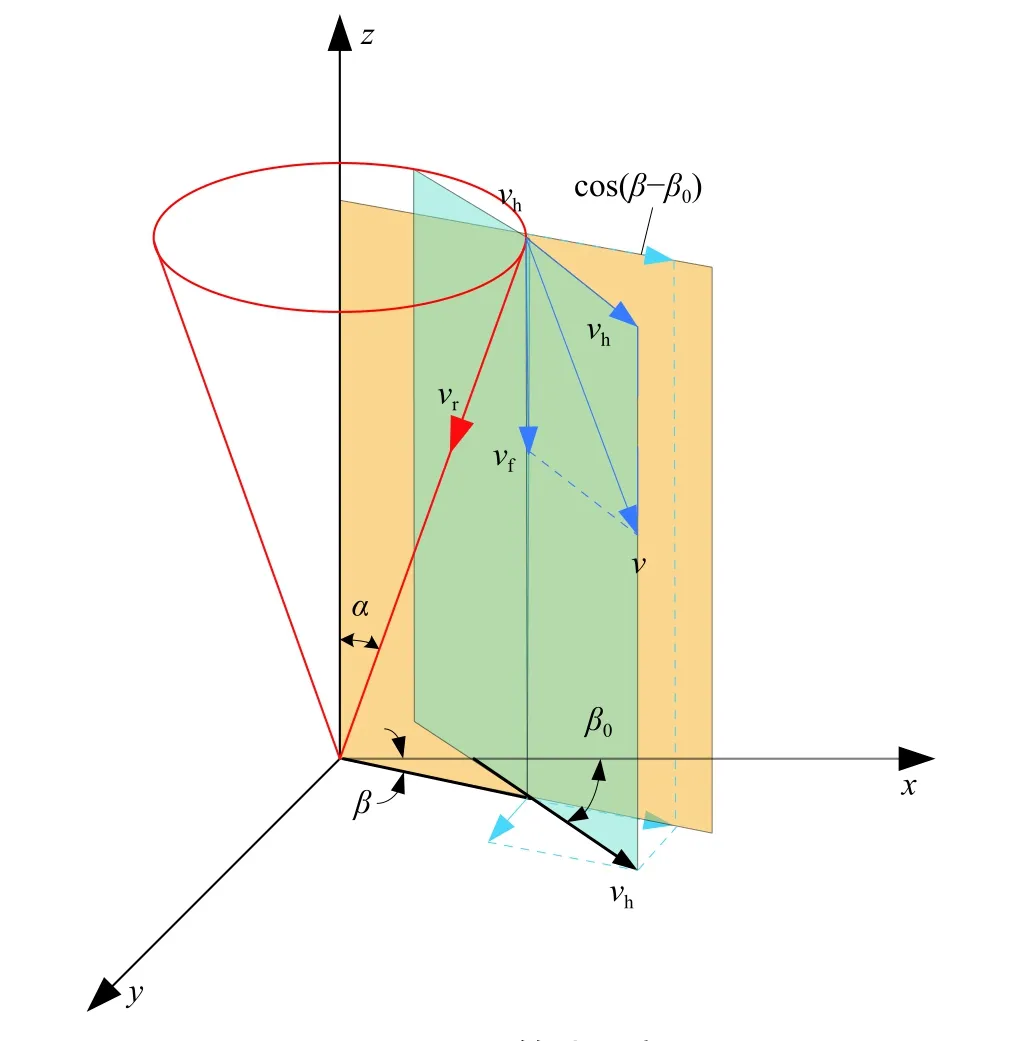
圖2 VAD算法示意圖
圖中 β0為水平風方向與x軸的夾角,即水平風風向;β為激光光束的方位角;α為激光光束的天頂角。則激光測風掃描得到的徑向風速可表示為:

假設在固定高度層風場是均勻分布的,即vf、vh和 β0不隨方位角發生變化。則由上式可以看出,當激光測風雷達以一固定仰角掃描時(α保持不變),不同方位的徑向風速隨方位角的變化滿足余弦關系,并疊加一個常數值vfcosα。因此可根據同一高度層多個方位上的測風數據進行余弦擬合,得出水平風向、風速。
2 激光測風雷達探測性能評估實驗
2.1 實驗設備
實驗所用激光測風雷達為相干脈沖激光測風雷達,性能指標參數如表1所示。
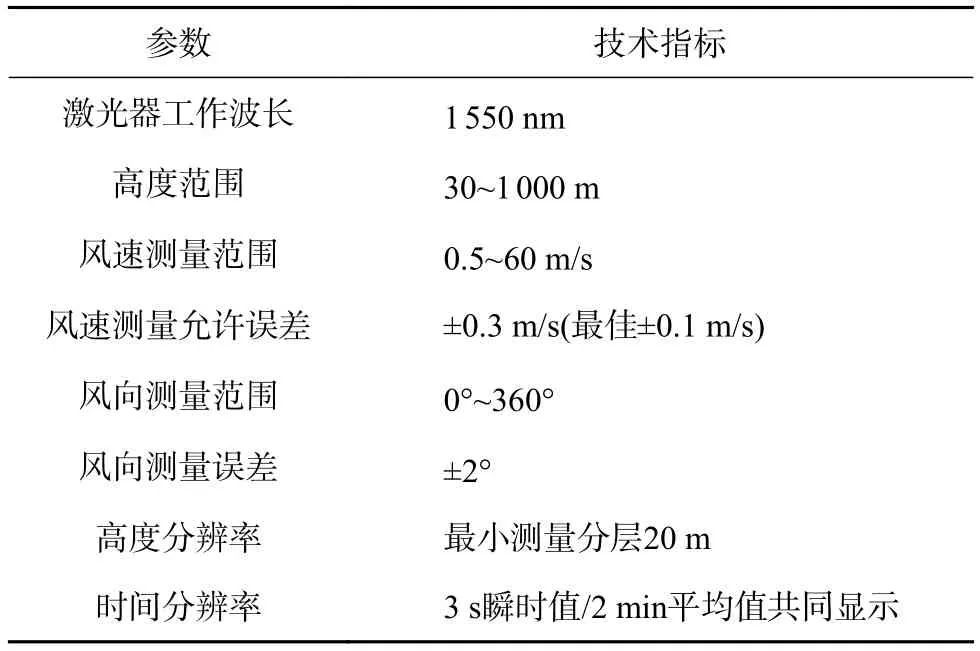
表1 激光測風雷達參數
用于比對的數據取自南京市國家基準氣候站的L波段高空氣象探測雷達。該型雷達主要用于高空大氣的綜合性觀測,工作時與GTS1型數字式電子探空儀相互配合,可獲取大氣溫、壓、濕、風等氣象要素信息。其獲取風場信息的主要原理是以氣球為示蹤物指代大氣的運動,通過追蹤氣球位置計算出風場情況。GFE(L)1型雷達主要參數如表2所示。
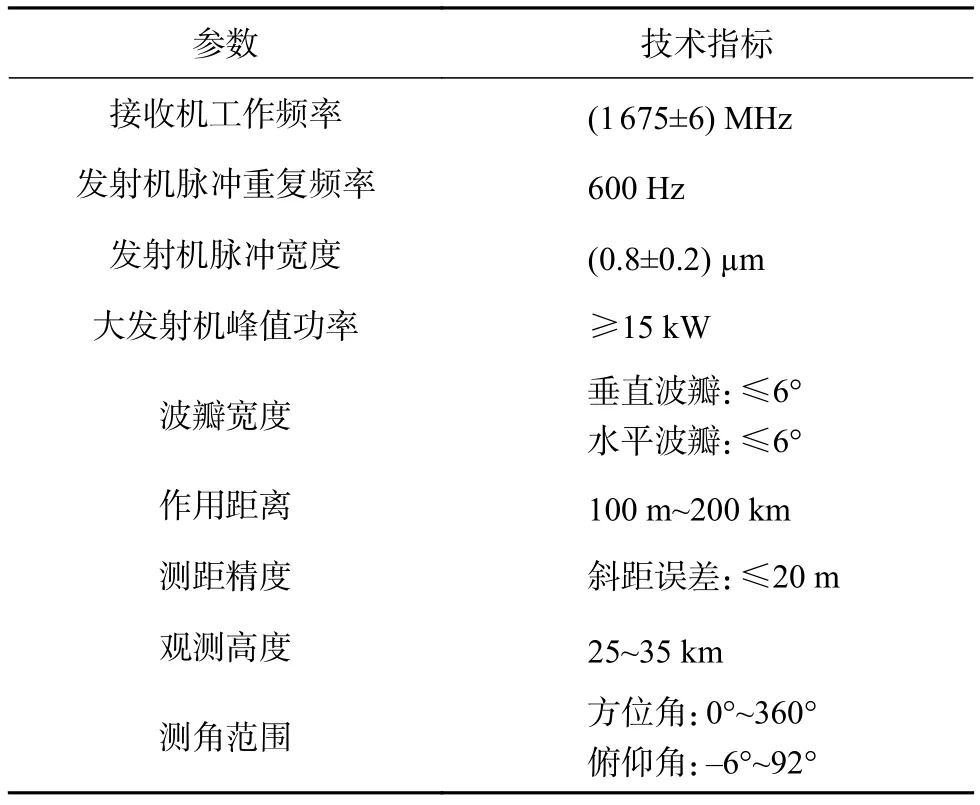
表2 L波段高空氣象探測雷達參數
2.2 實驗方案
激光測風雷達安裝在國防科技大學氣象海洋學院雙龍街校區的長望樓樓頂,海拔高度約為40 m,南京市國家基準氣候站海拔高度約為36 m,兩地間直線距離約為9.4 km,見圖3。激光測風雷達每30 s做一次掃描,每次掃描可獲取垂直方向上約30~1000 m高度范圍內的風向、風速信息,雷達庫長為20 m,即每一個數據點代表20 m范圍內的風場狀況。探空氣球升速約為6 m/s,每秒一個數據,即探空氣球風速數據空間分辨率約為6 m。因此,需將激光測風雷達數據在高度上進行插值,得到與氣球探空數據空間相匹配的風場數據。雖然探空氣球在上升的過程中會隨風飄移,但是根據大氣連續性特征,可以認為在一定水平范圍內,相同高度上的大氣是均一的,因此可以忽略氣球水平方向上飄移的影響。根據探空氣球到達各高度層的時刻,提取出對應時刻相同高度上的激光雷達測風數據,從而實現兩種測風數據時空上的匹配。

圖3 實驗設備相對位置圖
2.3 分析方法
激光測風雷達是根據氣溶膠粒子運動產生的多普勒效應反演得到的風場信息,屬于間接探測。而氣球探空是以氣球為示蹤物直接反映大氣的運動狀況,屬于直接探測,可信度較高,并已廣泛應用于氣象業務當中。因此,在進行數據比對時,將氣球探空數據作為基準,分析激光測風雷達測風性能。主要分析流程如圖4所示。將處理得到的時空匹配數據按照天氣類型分為晴天、陰天、雨天3種,評估不同天氣狀況下激光測風雷達性能;對每種天氣條件下的數據再分別按照風速區間和高度層進行劃分,評估激光測風雷達對不同大小風速及不同高度風場的探測性能。
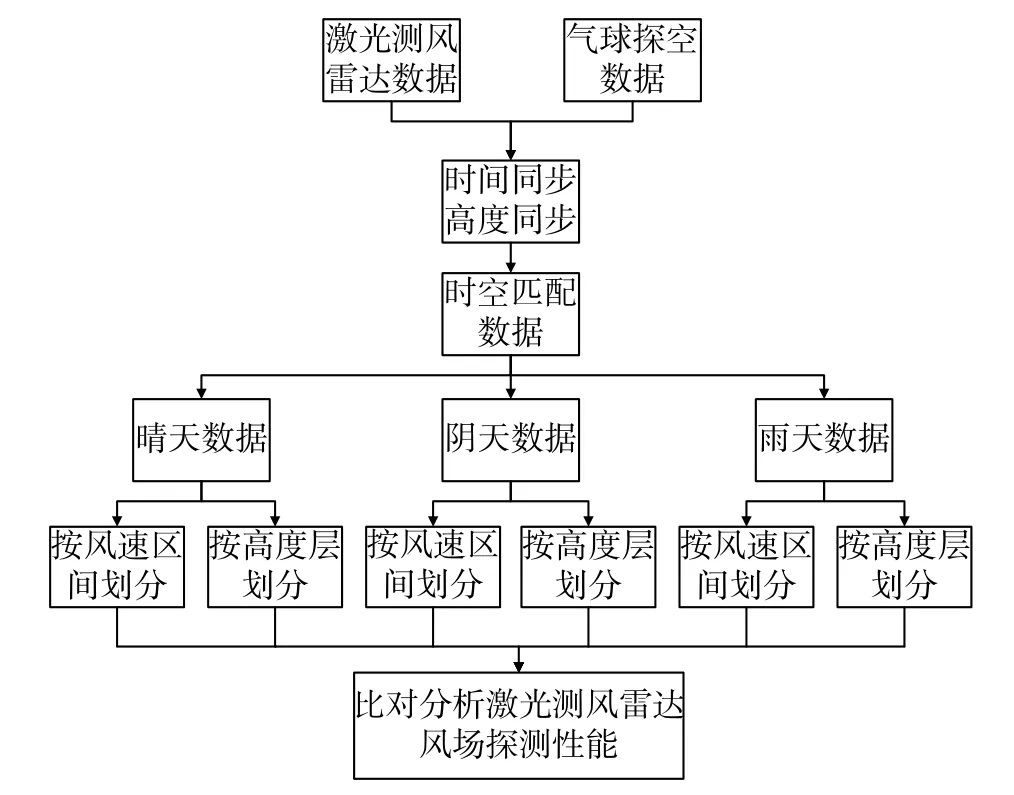
圖4 激光測風雷達風場探測性能評估流程圖
使用相關系數R和平均偏差AD來對激光測風雷達的測風性能進行評估,其計算公式如下:
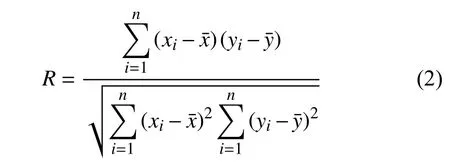
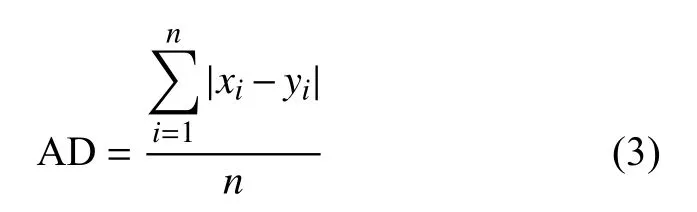
式中:xi——激光測風雷達數據;
——激光測風雷達數據平均值;
yi——氣球探空數據;
——氣球探空數據平均值;
n——數據點的個數。
不同的天氣狀況對激光會產生不同的影響。通常來講,天氣狀況越差,大氣消光系數越大,大氣對激光的衰減就越大,從而影響到激光測風雷達的探測性能。因此,將時空匹配后得到比對數據按照天氣狀況分為3類:晴天、陰天和雨天。對不同天氣類型時的激光雷達探測性能進行比較分析。
在對兩種測風數據的風向數據進行比對時會出現過零現象。過零現象是指風向在零度附近數值上相差很大,而實際上相差很小的現象,例如,1°和359°在數值上相差了358°而實際上兩個風向只有2°的差異。因此就要對風向進行過零處理,具體方法為:對兩風向值作差,如果兩風向差值的絕對值大于180°,則給較小風向加上360°。
3 激光測風雷達風場探測性能分析
激光測風雷達在2019年3月17日至2019年4月12日之間獲取了近一個月的測風數據。激光測風雷達可以做到全天時掃描,30 s獲取一次風場數據。高空氣象探測的放球時間是固定每天的07:15 和 19:15。將激光測風雷達風場數據與氣球探空獲得的風場數據進行時空匹配后共得到32組比對數據。
3.1 整體分析
如圖5所示,對不同天氣類型下的兩種測風數據分別做一元線性擬合,圖中“”的橫坐標為氣球探空所得風向或風速,縱坐標為時空對應的激光測風雷達測得的風向或風速。圖中斜線為擬合直線。

圖5 不同天氣類型激光雷達測風數據與氣球探空數據一元擬合
兩種測風方式的風速數據在晴天、陰天、雨天的相關系數分別為 0.89469、0.87636、0.77253。隨著天氣狀況變差,相關系數逐漸變小,這說明天氣條件不好時,激光測風雷達測風性能會有所下降。晴天與陰天時的相關系數相差不大,說明陰天對于激光測風雷達的探測性能并沒有造成太大影響,但晴天與陰天的相關系數均明顯大于雨天時的相關系數,這就說明雨天對于激光雷達測風性能會造成較大影響。
兩種測風方式的風向數據在晴天、陰天、雨天的相關系數分別為 0.97407、0.99404、0.95904。整體上風向的相關系數要大于風速的相關系數,且不同天氣條件時的相關系數差別均不是很大,這說明激光測風雷達的風向探測性能要優于風速探測性能。與風速比對結果不同的是,陰天時兩種數據的相關系數略大于晴天時的相關系數,主要原因是本次實驗采集到的陰天測風數據要少于晴天時的測風數據,所以與晴天數據相比,陰天數據中的質量較差數據也相對較少;另一方面,由于激光測風雷達的風向探測性能優于風速探測性能,風向探測的穩定性更好,因此受到不良天氣條件的影響也較小。綜合上述兩個原因,出現了陰天時相關系數大于晴天的情況。但是無論是晴天還是陰天,相關系數均比雨天時的大,這也再次印證了雨天對于激光測風雷達的探測性能會造成較大影響。
3.2 按高度層分類分析
將不同天氣條件下兩種測風數據按照高度層進行劃分,分析不同高度層兩種測風數據的平均偏差。考慮到兩種測風設備相距較遠,近地層的測風結果會有較大差異,因此選取200 m為第一高度層,實驗選用的激光測風雷達最大探測距離約為1000 m,因此將900 m高度以上選為最后一個高度層,中間按照100 m的間隔進行分層。各高度層的風向、風速平均偏差如圖6所示。
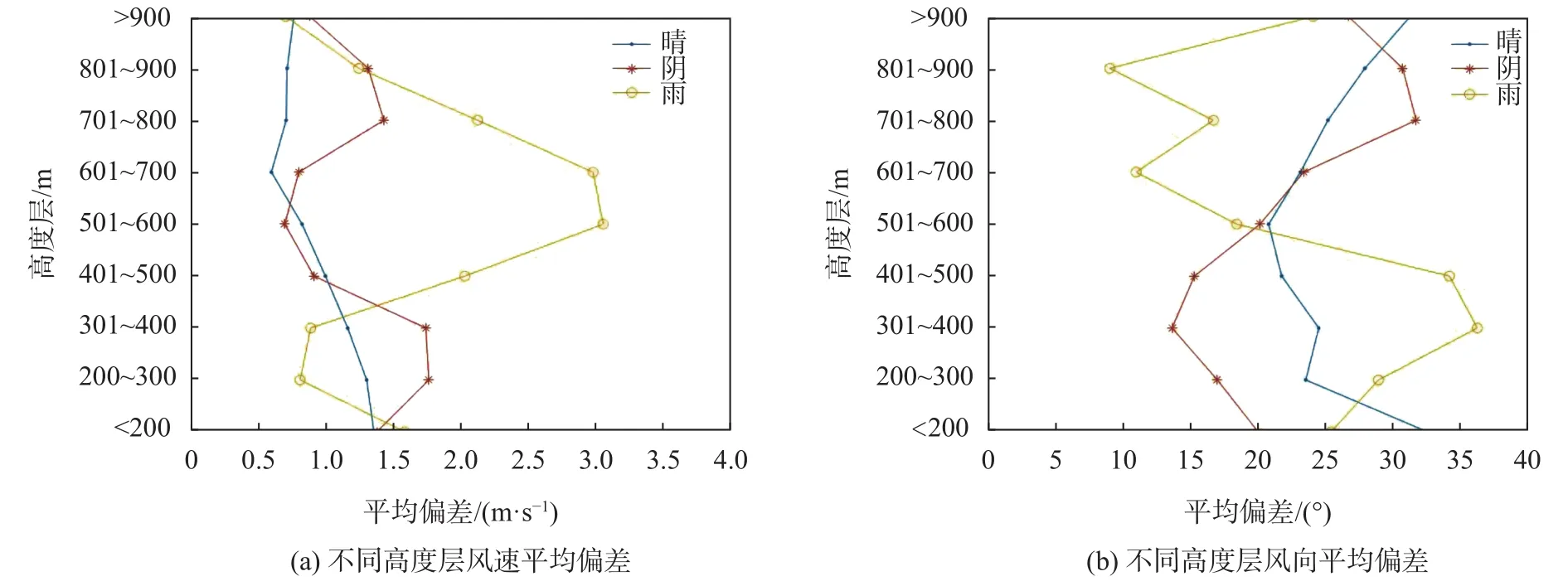
圖6 不同高度層激光測風雷達數據與氣球探空數據的平均偏差
從圖中可以看出無論是風向還是風速,隨著高度的變化平均偏差均會出現一定程度的波動。在3種天氣類型中,晴天時平均偏差隨高度的波動最小,相對而言更加穩定。因此可從晴天時平均偏差隨高度的變化分析激光測風雷達在各高度層的探測精度。從圖中可以看出,晴天時,隨著高度的增加,無論是風向還是風速,平均偏差均呈現先減小后增大的趨勢,轉折點大約在600 m高度。較低高度層與較高高度層平均偏差較大的原因主要為:在近地面層大氣風場受地形等因素影響較大,加之實驗中兩設備相距較遠,測風結果會出現較大差異;在較高的高度層偏差較大主要有兩方面原因,一方面激光測風雷達以氣溶膠粒子為示蹤物,在對流層內氣溶膠濃度隨高度的增加按指數減少,再加上隨著探測距離的增加光強衰減加劇,激光測風雷達的探測性能有所下降;另一方面,激光測風雷達采用VAD算法反演垂直風場時假定大氣風場是水平均一的,而隨著高度的增加各激光光束之間的距離增大,反演結果代表的水平風場范圍增大,大氣的水平均一性逐漸減弱,算法本身的誤差也會增大。因此可知,在轉折點處(約600 m高度)最能體現激光測風雷達的真實探測性能,風速偏差約為1 m/s,風向偏差約為20°。
陰天和雨天時,隨著高度的變化,無論是風向還是風速,兩種測風數據的平均偏差均出現較大程度的波動,且雨天時的波動程度最為顯著,這也體現出了不良天氣條件對于激光測風雷達探測性能的影響。由于雨滴會對激光造成很大程度的衰減,因此雨天時兩種測風數據會出現很大的偏差,其中風速的最大偏差達到3.05 m/s,約為平均風速7.62 m/s的40%,風向的最大偏差達到31.65°。
3.3 按風速區間分類分析
將不同天氣條件下兩種測風數據按照氣球探空測得的風速區間進行劃分,分析不同風速時兩種測風數據的平均偏差。根據實際測得的風速情況,將風速小于4 m/s作為第一個區間,風速大于10 m/s作為最后一個區間,中間層按照1 m/s的間隔進行劃分。各風速區間的風向、風速平均偏差如圖7所示。

圖7 不同風速區間激光測風雷達數據與氣球探空數據的平均偏差
從圖中可以看出晴天時兩種測風數據的風速平均偏差基本穩定在1 m/s,說明激光測風雷達的風速探測精度基本不受風速變化的影響。兩種數據的風向平均偏差在風速大于4 m/s時穩定性良好,基本保持在20°,當風速小于4 m/s時,平均偏差突增至34°,說明激光測風雷達的風向探測精度受小風速的影響很大。分析其原因為:當風速比較小時,激光測風雷達的回波信號很弱,有用信號與雜波信號混合在一起,影響了雷達信號處理系統對于譜峰的識別,可能會反演出錯誤的風向結果,從而降低了激光測風雷達風向探測精度。
陰天和雨天時,兩種測風結果的風向、風速平均偏差均出現較大波動,再次說明了不良天氣條件對于激光測風雷達探測性能的影響。其中雨天時的波動最為顯著,風速的最大平均偏差達到2.99 m/s,風向的最大平均偏差達到39°。
4 結束語
本文主要分析了激光測風雷達的VAD風場掃描方式以及VAD風場反演算法。將激光測風雷達風場數據與氣球探空風場數據進行時空同步處理,得到時間和空間上相匹配的32組數據。并引入相關系數和平均偏差,評估激光測風雷達在不同天氣條件、不同風速區間、不同高度范圍的風場探測性能,得到以下結論:
1)晴天時激光測風雷達具有良好的探測性能,并且風向的探測性能要優于風速的探測性能;不良天氣條件會對激光測風雷達的探測性能造成一定程度的影響,雨天的影響最為顯著。
2)隨著探測高度的增加,受掃描方式和反演算法兩方面的影響,激光測風雷達的探測精度逐漸下降。
3)激光測風雷達的風速探測性能基本不受風速變化影響,風向探測性能除在小風速時會受較大程度影響外也基本保持穩定。
4)激光測風雷達具有較高的探測精度,風速偏差約為 1 m/s,風向偏差約為 20°。
本文工作還存在一些不足,有待后期的進一步研究。首先,本文使用的數據容量相對較小,后期可獲取更長時間范圍內的風場數據進行比對分析;其次,比對儀器相對較少,后期可將激光測風雷達與風廓線儀、多普勒天氣雷達等多種測風手段進行比較,分析各種風場探測手段的優劣;在天氣類型分類方面,后期可對天氣類型進一步細化,增加多云、霧霾等多種天氣類型,得出更為細致的分析結論。
猜你喜歡
氣象與環境科學(2021年4期)2021-08-27 02:26:12
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中國電業與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學學報(2016年4期)2016-06-15 20:29:37
風能(2016年11期)2016-03-04 05:24:00
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
電網與清潔能源(2015年3期)2015-02-28 16:03:31