煤礦智能化開采系統(tǒng)功能及典型模式分析研究
2022-03-04 07:13:28侯剛
中國煤炭 2022年2期
侯 剛
(1. 中煤科工開采研究院有限公司,北京市朝陽區(qū),100013;2.天地科技股份有限公司,北京市朝陽區(qū),100013)
隨著國內(nèi)外智能化開采技術(shù)的不斷推進(jìn),我國部分現(xiàn)代化礦井智能化開采水平也在顯著提升,為我國煤礦合理、高效、完全、綠色、持續(xù)的發(fā)展提供了有力保障[1-4]。
由于我國煤層分布廣泛且復(fù)雜多樣,開采方式和開采形態(tài)不盡相同,有年產(chǎn)千萬噸的中厚煤層大型礦井,也有年產(chǎn)幾十萬噸的薄煤層中小型礦井,加上各個(gè)煤礦人員素質(zhì)、裝備現(xiàn)狀、運(yùn)輸方式、地理位置、煤質(zhì)情況、銷售狀況和各礦經(jīng)濟(jì)效益等各不相同,智能化開采也面臨著如何應(yīng)用和配置合理技術(shù)和裝備的問題[5-10]。筆者基于目前國內(nèi)智能化開采的現(xiàn)狀和未來的發(fā)展,提出智能化開采系統(tǒng)分為3個(gè)層級(jí)系統(tǒng),并分析介紹了4種典型的智能開采模式,認(rèn)為煤礦應(yīng)根據(jù)實(shí)際需求,針對(duì)性地設(shè)計(jì)、應(yīng)用和研究,選擇適合煤礦自身特點(diǎn)的智能化開采技術(shù)和裝備。
1 智能化開采總體架構(gòu)及現(xiàn)階段目標(biāo)
1.1 智能化開采總體架構(gòu)
智能化開采按照部署空間位置劃分為采煤工作面采場(chǎng)布置層、運(yùn)輸巷智能化集控中心層和地面分控中心層3個(gè)層級(jí)架構(gòu),按照系統(tǒng)主要功能架構(gòu)可分為單機(jī)控制系統(tǒng)層、井下工作面智能化集控系統(tǒng)層和地面分控中心3個(gè)層級(jí)。智能化開采總體功能架構(gòu)如圖1所示。
(1)單機(jī)控制系統(tǒng)層。該層主要實(shí)現(xiàn)單機(jī)子系統(tǒng)的智能監(jiān)控,主要包含采煤機(jī)控制子系統(tǒng)、運(yùn)輸機(jī)“小三機(jī)”控制子系統(tǒng)、電液控制子系統(tǒng)和其它控制子系統(tǒng)等智能化開采系統(tǒng)。每個(gè)子系統(tǒng)主要通過基礎(chǔ)傳感器的設(shè)備感知獲取各設(shè)備的實(shí)時(shí)狀態(tài),通過子系統(tǒng)的綜合判斷實(shí)現(xiàn)子系統(tǒng)自身的決策分析,然后下發(fā)控制指令完成對(duì)子系統(tǒng)單機(jī)設(shè)備的智能控制。
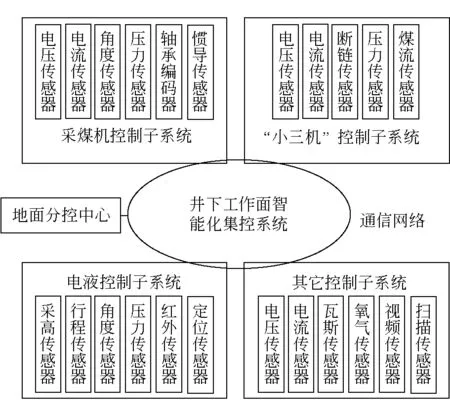
圖1 智能化開采總體功能架構(gòu)
(2)井下工作面智能化集控系統(tǒng)層。該層主要通過工作面網(wǎng)絡(luò)實(shí)現(xiàn)對(duì)各單機(jī)子系統(tǒng)和其它關(guān)聯(lián)子系統(tǒng)的數(shù)據(jù)獲取,從工作面總體的系統(tǒng)層面實(shí)現(xiàn)進(jìn)一步的智能化聯(lián)動(dòng),從而實(shí)現(xiàn)對(duì)采煤機(jī)、刮板輸送機(jī)、液壓支架、運(yùn)輸巷帶式輸送機(jī)、供電、供液等系統(tǒng)的智能化分析,并將分析結(jié)果實(shí)時(shí)顯示告知操作人員,同時(shí)將智能化分析操作指令下發(fā)給各單子系統(tǒng)實(shí)現(xiàn)智能控制。
(3)地面分控中心層。該層主要通過礦井網(wǎng)絡(luò)將井下工作面智能化集控系統(tǒng)數(shù)據(jù)上傳至地面,在地面進(jìn)行大數(shù)據(jù)長(zhǎng)時(shí)間進(jìn)一步的智能化分析和判斷,并實(shí)現(xiàn)和礦井綜合管控平臺(tái)類系統(tǒng)的對(duì)接,以實(shí)現(xiàn)智能化開采系統(tǒng)和智能化礦山系統(tǒng)的智能聯(lián)動(dòng)控制。
1.2 智能化開采現(xiàn)階段主要目標(biāo)
(1)智能化開采設(shè)計(jì)和應(yīng)用目標(biāo)。現(xiàn)階段,智能化開采的設(shè)計(jì)和應(yīng)用的總體目標(biāo)應(yīng)該從以下4個(gè)方面考慮。一是提高智能化開采工作面的智能化程度,在地質(zhì)和其它條件具備的情況下,實(shí)現(xiàn)工作面內(nèi)無需長(zhǎng)時(shí)間有人操作、有人巡視、工作面內(nèi)和集控中心進(jìn)行人工干預(yù)的工作方式;二是降低工人勞動(dòng)強(qiáng)度,從現(xiàn)場(chǎng)操作工到巡檢干預(yù)工和遠(yuǎn)程干預(yù)操作工的轉(zhuǎn)變;三是提高工人和設(shè)備的安全系數(shù),減少工作面內(nèi)操作人員數(shù)量,轉(zhuǎn)移到安全系數(shù)相對(duì)較高的運(yùn)輸巷集控中心進(jìn)行遠(yuǎn)程操作;四是根據(jù)各礦實(shí)際情況,智能化開采驗(yàn)收要滿足行業(yè)標(biāo)準(zhǔn),按實(shí)際需求配置適當(dāng)?shù)闹悄芑_采研究。
(2)智能化開采功能目標(biāo)。從智能化開采功能上的總體目標(biāo)應(yīng)以先進(jìn)可靠的電液控系統(tǒng)、通信系統(tǒng)、集成供液系統(tǒng)、采煤機(jī)記憶截割控制子系統(tǒng)、智能噴霧降塵系統(tǒng)、智能煤流負(fù)荷控制系統(tǒng)、工作面照明等系統(tǒng)為基礎(chǔ),以工作面人員識(shí)別系統(tǒng)、頂板壓力檢測(cè)系統(tǒng)、設(shè)備故障診斷系統(tǒng)、安全監(jiān)測(cè)監(jiān)控系統(tǒng)、工作面視頻系統(tǒng)、智能移動(dòng)管理系統(tǒng)、三維模型顯示等系統(tǒng)為保障,按需配置研究和試驗(yàn)工作巡檢、采煤機(jī)電纜自動(dòng)張緊、三維掃描建模、三維真實(shí)驅(qū)動(dòng)、全壽命周期管理等系統(tǒng),以千兆及無線通信工業(yè)網(wǎng)絡(luò)為通道,以數(shù)據(jù)分析和處理為依據(jù),以高端集控設(shè)備為平臺(tái),建設(shè)以實(shí)現(xiàn)井下集控、地面遠(yuǎn)控為目標(biāo)[11-12],具有智能運(yùn)行、智能信息獲取、智能決策分析的安全、高效、節(jié)能的智能化綜采工作面。
(3)智能化開采工作面人員配置目標(biāo)。智能化開采工作面人員配置目標(biāo)可以按照6~8人考慮。主要是實(shí)現(xiàn)工作面內(nèi)有1~2人巡視,完成對(duì)采煤機(jī)采煤過程的必要人工干預(yù),完成工作面液壓支架動(dòng)作質(zhì)量、調(diào)直、補(bǔ)架等工作。工作面機(jī)尾回風(fēng)巷位置配置1人,主要完成回風(fēng)巷超前支架、端頭支架等干預(yù)調(diào)整;工作面機(jī)頭和運(yùn)輸運(yùn)輸巷配置1~2人,主要完成轉(zhuǎn)載破碎機(jī)、帶式輸送機(jī)自移機(jī)尾、端頭支架、超前支架等干預(yù)動(dòng)作;運(yùn)輸巷集控中心配置1~2人,主要負(fù)責(zé)工作面所有設(shè)備的遠(yuǎn)程實(shí)時(shí)干預(yù)。
2 智能化開采系統(tǒng)組成及功能
基于技術(shù)和裝備成熟的程度,將智能化開采系統(tǒng)分為智能化開采基本系統(tǒng)、成熟可應(yīng)用系統(tǒng)、研發(fā)試驗(yàn)階段系統(tǒng)3個(gè)層級(jí),各系統(tǒng)具體組成如圖2所示。
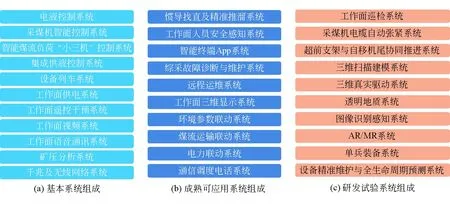
圖2 智能化開采3層系統(tǒng)組成
2.1 智能化開采基本系統(tǒng)主要功能
智能化開采基本系統(tǒng)是智能化開采的必要系統(tǒng),主要包括電液控制系統(tǒng)、采煤機(jī)智能控制系統(tǒng)、智能煤流負(fù)荷控制系統(tǒng)、集成供液控制系統(tǒng)、設(shè)備列車系統(tǒng)、工作面供電系統(tǒng)、工作面遙控干預(yù)系統(tǒng)、工作面視頻系統(tǒng)、工作面語音通訊系統(tǒng)、礦壓分析系統(tǒng)、千兆及無線網(wǎng)絡(luò)系統(tǒng)等組成。
(1)電液控制系統(tǒng)。該系統(tǒng)主要在每臺(tái)液壓支架配置控制器、電磁閥,按需配置紅外接收、立柱壓力、推移和伸縮梁行程、采高、主要結(jié)構(gòu)和護(hù)幫傾角等傳感器,實(shí)現(xiàn)液壓支架的動(dòng)作控制、顯示、急停、閉鎖、報(bào)警、跟隨采煤機(jī)控制液壓支架動(dòng)作、自動(dòng)找直、防碰撞、自動(dòng)找直執(zhí)行等系列化動(dòng)作。
(2)采煤機(jī)智能控制系統(tǒng)。該系統(tǒng)通過配置必要的電器類、壓力、角度等傳感器,實(shí)現(xiàn)對(duì)采煤機(jī)數(shù)據(jù)的采集、上傳、分析和動(dòng)作執(zhí)行,通過記憶截割、路徑規(guī)劃、實(shí)時(shí)調(diào)整等方式完成自動(dòng)調(diào)高、臥底、加速、減速、割三角煤、斜切進(jìn)刀等采煤機(jī)工藝。
(3)智能煤流負(fù)荷三機(jī)控制系統(tǒng)。該系統(tǒng)通過配置必要的煤流掃描傳感器、變頻器、伸縮機(jī)尾等設(shè)備,實(shí)現(xiàn)根據(jù)煤流量、有功功率、煤機(jī)綜合參數(shù)等分析判斷,實(shí)現(xiàn)對(duì)“小三機(jī)”的智能調(diào)速、智能啟動(dòng)、停機(jī)松鏈、自動(dòng)張緊運(yùn)輸機(jī)等功能。
(4)集成供液控制系統(tǒng)。該系統(tǒng)通過配置必要的液位、壓力、配比濃度等傳感器,主泵配置變頻器來實(shí)現(xiàn)乳化液供液系統(tǒng)和供水系統(tǒng)的智能控制,實(shí)現(xiàn)自動(dòng)按需供液供水、自動(dòng)配液、防爆管、多級(jí)過濾、反滲透、恒壓供液等智能化功能。
(5)設(shè)備列車系統(tǒng)。該系統(tǒng)目前主要有軌道式、單軌吊式和自移式設(shè)備列車3種方式,主要負(fù)責(zé)安放工作面供電、供液、集控中心、工具、備件等。但個(gè)別巷道變形嚴(yán)重和其它有條件的礦井也可采用遠(yuǎn)距離供電供液的方式。
(6)工作面供電系統(tǒng)。該系統(tǒng)主要由移動(dòng)變電站、組合開關(guān)、變頻器、電機(jī)、照明綜保等設(shè)備組成,為智能化開采工作面提供電力保障。隨著技術(shù)的不斷進(jìn)步,變頻一體機(jī)、永磁電機(jī)等供電設(shè)備應(yīng)用也越來越多。
(7)工作面遙控干預(yù)系統(tǒng)。該系統(tǒng)通過配置遙控器實(shí)現(xiàn)對(duì)采煤機(jī)、液壓支架、設(shè)備列車等遠(yuǎn)程遙控操作。
(8)工作面視頻系統(tǒng)。該系統(tǒng)主要完成對(duì)工作面設(shè)備工況、人員情況的實(shí)時(shí)監(jiān)測(cè)、實(shí)現(xiàn)跟機(jī)視頻自動(dòng)切換、高清彩色圖像、特定事件和人員跟蹤等功能,目前大多數(shù)新配置的攝像頭一般不低于1 080 p。
(9)工作面語音通訊系統(tǒng)。該系統(tǒng)主要通過配置閉鎖和喊話裝置,實(shí)現(xiàn)對(duì)工作面刮板輸送機(jī)等設(shè)備進(jìn)行緊急情況閉鎖和全工作面語音通話。
(10)礦壓分析系統(tǒng)。該系統(tǒng)主要實(shí)現(xiàn)對(duì)工作面壓力趨勢(shì)、礦壓分步、周期來壓等相關(guān)壓力狀況進(jìn)行統(tǒng)計(jì)分析。
(11)千兆及無線網(wǎng)絡(luò)系統(tǒng)。該系統(tǒng)主要實(shí)現(xiàn)對(duì)工作面數(shù)據(jù)、視頻等通過有線環(huán)網(wǎng)和無線輔助通信的方式進(jìn)行傳輸。
2.2 智能化開采成熟可應(yīng)用系統(tǒng)主要功能
成熟可應(yīng)用的智能化開采工作面系統(tǒng)主要是指根據(jù)各礦井實(shí)際需求可按需進(jìn)行配置的部分系統(tǒng),主要包括慣導(dǎo)找直及精準(zhǔn)推溜系統(tǒng)、人員安全感知系統(tǒng)、智能終端APP系統(tǒng)、綜采故障診斷與維護(hù)系統(tǒng)、遠(yuǎn)程運(yùn)維系統(tǒng)、工作面三維顯示系統(tǒng)、環(huán)境參數(shù)聯(lián)動(dòng)系統(tǒng)、煤流運(yùn)輸聯(lián)動(dòng)系統(tǒng)、電力聯(lián)動(dòng)系統(tǒng)以及通信調(diào)度電話系統(tǒng)等。
(1)慣導(dǎo)找直及精準(zhǔn)推溜系統(tǒng)。該系統(tǒng)在采煤機(jī)配置慣性導(dǎo)航系統(tǒng)、液壓支架推移行程控制執(zhí)行結(jié)構(gòu)上配置精準(zhǔn)推溜閥組,實(shí)現(xiàn)工作面控制精度在50 cm的自動(dòng)找直,從而實(shí)現(xiàn)工作面連續(xù)推采。
(2)人員安全感知系統(tǒng)。該系統(tǒng)通過在工作面人員攜帶的人員定位識(shí)別卡實(shí)現(xiàn)人員所在區(qū)域的感知,如人員在危險(xiǎn)區(qū)可實(shí)現(xiàn)智能閉鎖的相關(guān)設(shè)備,一般安全感知精度不大于20 cm。
(3)智能終端App系統(tǒng)。在該系統(tǒng)中工作人員在有網(wǎng)絡(luò)的地方通過PAD類和手機(jī)類終端可實(shí)時(shí)掌握工作面設(shè)備和環(huán)境等實(shí)時(shí)工況。
(4)綜采故障診斷與維護(hù)系統(tǒng)。該系統(tǒng)通過設(shè)備自身監(jiān)測(cè)參數(shù)結(jié)合必要的振動(dòng)等傳感器實(shí)現(xiàn)對(duì)設(shè)備故障的基本感知并提出維護(hù)維修建議。
(5)遠(yuǎn)程運(yùn)維系統(tǒng)。該系統(tǒng)在地面配置單獨(dú)的服務(wù)器,在礦方授權(quán)范圍內(nèi)各系統(tǒng)廠家可遠(yuǎn)程實(shí)時(shí)了解井下系統(tǒng)和設(shè)備狀況,提供遠(yuǎn)程維修、維護(hù)和保養(yǎng)等技術(shù)支持。
(6)工作面三維顯示系統(tǒng)。該系統(tǒng)主要通過三維方式對(duì)智能化開采的設(shè)備和總體情況進(jìn)行展示。
(7)環(huán)境參數(shù)聯(lián)動(dòng)系統(tǒng)。該系統(tǒng)主要實(shí)現(xiàn)與其它工作面相關(guān)類系統(tǒng)實(shí)現(xiàn)數(shù)據(jù)聯(lián)動(dòng),實(shí)現(xiàn)與通風(fēng)、瓦斯、粉塵、兩巷壓力等傳感器和數(shù)據(jù)聯(lián)動(dòng),當(dāng)發(fā)生報(bào)警和不具備開采條件時(shí),智能化系統(tǒng)按照邏輯關(guān)系停止工作面設(shè)備操作。
(8)煤流運(yùn)輸聯(lián)動(dòng)系統(tǒng)。該系統(tǒng)主要實(shí)現(xiàn)工作面設(shè)備與運(yùn)輸巷帶式輸送機(jī)、主運(yùn)帶式輸送機(jī)、選煤廠等煤流運(yùn)輸系統(tǒng)聯(lián)動(dòng),根據(jù)煤流運(yùn)輸系統(tǒng)實(shí)時(shí)工況對(duì)工作面設(shè)備進(jìn)行智能啟停和調(diào)試控制。
(9)電力聯(lián)動(dòng)系統(tǒng)。該系統(tǒng)主要是實(shí)現(xiàn)工作供電系統(tǒng)與盤區(qū)變電所和中央變電所供電系統(tǒng)聯(lián)動(dòng),根據(jù)關(guān)聯(lián)供電系統(tǒng)工況控制工作面供電系統(tǒng)實(shí)時(shí)動(dòng)作。
(10)通信調(diào)度電話系統(tǒng)。該系統(tǒng)主要實(shí)現(xiàn)工作面語音通信系統(tǒng)與地面調(diào)度電話系統(tǒng)聯(lián)通,實(shí)現(xiàn)工作面語音通信和地面調(diào)度電話語音實(shí)時(shí)互聯(lián)和通話。
2.3 智能化開采研發(fā)試驗(yàn)系統(tǒng)主要功能
研發(fā)試驗(yàn)階段的系統(tǒng)主要指在個(gè)別具備條件的煤礦和場(chǎng)景所應(yīng)用,但暫且不具備大面積推廣應(yīng)用的相關(guān)系統(tǒng)。該系統(tǒng)主要包括工作面巡檢系統(tǒng)、采煤機(jī)電纜自動(dòng)張緊系統(tǒng)、超前支架與自移機(jī)尾協(xié)同推進(jìn)系統(tǒng)、三維掃描建模系統(tǒng)、三維真實(shí)驅(qū)動(dòng)系統(tǒng)、透明地質(zhì)系統(tǒng)、圖像識(shí)別系統(tǒng)、AR/MR系統(tǒng)、單兵裝備系統(tǒng)、設(shè)備精準(zhǔn)維護(hù)與全生命周期系統(tǒng)等。
(1)采煤機(jī)電纜自動(dòng)張緊系統(tǒng)。該系統(tǒng)主要通過配置拉力傳感器、牽引裝置、張緊油缸、緩沖裝置、變頻控制等設(shè)備,實(shí)現(xiàn)采煤機(jī)在行走過程中電纜始終處于合理的張緊狀態(tài),防止出現(xiàn)電纜掉落電纜槽外和電纜多層重疊的情況。
(2)超前支架與自移機(jī)尾協(xié)同推進(jìn)系統(tǒng)。該系統(tǒng)主要通過在超前支架與自移機(jī)尾配置姿態(tài)、壓力、行程、測(cè)距等傳感器來實(shí)現(xiàn)與工作面設(shè)備協(xié)同自主移動(dòng)。
(3)三維激光掃描系統(tǒng)。該系統(tǒng)通過在工作面及巷道合理布置激光掃描傳感器實(shí)現(xiàn)對(duì)工作面設(shè)備狀況、地質(zhì)環(huán)境變化、各系統(tǒng)運(yùn)行情況的實(shí)時(shí)建模和比對(duì),通過比對(duì)分析出設(shè)備和環(huán)境的變化情況。
(4)三維真實(shí)驅(qū)動(dòng)系統(tǒng)。三維真實(shí)驅(qū)動(dòng)比三維可視化顯示更進(jìn)一步,實(shí)現(xiàn)三維模型和井上設(shè)備數(shù)據(jù)的實(shí)時(shí)關(guān)聯(lián)和真實(shí)動(dòng)作,應(yīng)具備通過模型反向控制井下設(shè)備的能力。
(5)透明地質(zhì)系統(tǒng)。透明地質(zhì)是在勘察結(jié)果的基礎(chǔ)上通過電磁、雷達(dá)、微震、煤巖識(shí)別等多方式多手段,動(dòng)態(tài)修正和形成工作面地質(zhì)動(dòng)態(tài)模型,為智能化開采的規(guī)劃截割提供技術(shù)支撐。
(6)圖像識(shí)別系統(tǒng)。該系統(tǒng)主要通過圖像識(shí)別技術(shù)和AI類視頻算法、實(shí)現(xiàn)對(duì)工作面設(shè)備動(dòng)作、煤流變化、人員行為等綜合分析和監(jiān)測(cè)。
(7)AR/MR系統(tǒng)。AR/MR技術(shù)是通過佩戴對(duì)應(yīng)的AR/MR眼鏡類裝備,實(shí)現(xiàn)對(duì)設(shè)備狀態(tài)、維修指導(dǎo)、設(shè)備巡檢、實(shí)時(shí)視頻和語音通信等功能。
(8)單兵裝備系統(tǒng)。該系統(tǒng)主要指通過佩戴的單兵AR、手機(jī)、PAD、點(diǎn)檢儀等智能終端設(shè)備,來方便相關(guān)人員及時(shí)掌握了解和獲取設(shè)備工況、輔助分析決策的目的。
(9)設(shè)備精準(zhǔn)維護(hù)與全生命周期系統(tǒng)。該系統(tǒng)比故障診斷和維護(hù)系統(tǒng)更深入一步,可實(shí)現(xiàn)對(duì)個(gè)別設(shè)備具體的故障診斷與維護(hù)。例如某故障傳動(dòng)齒輪的精準(zhǔn)定位,并能和上位機(jī)軟件配合實(shí)現(xiàn)對(duì)設(shè)備從采購、使用、報(bào)廢全過程的智能化管控。
2.4 智能化開采井下集控和地面分控系統(tǒng)主要功能
(1)井下分控中心主要由配置必要的工控主機(jī)、顯示器、操作按鍵和有效防護(hù)空間構(gòu)成,主要完成對(duì)采煤機(jī)、液壓支架、運(yùn)輸機(jī)“小三機(jī)”、集中供液、供電及其他關(guān)聯(lián)系統(tǒng)的數(shù)據(jù)獲取、分析、處理、管理、支架人工干預(yù)提醒等智能控制功能。多數(shù)會(huì)配置6臺(tái)顯示器、系統(tǒng)對(duì)子系統(tǒng)控制響應(yīng)時(shí)間一般要求小于120 ms。
(2)地面分控中心在功能上與井下集控中心具有的分析和控制功能一樣,在既有井下集控中心功能的基礎(chǔ)上,更注重?cái)?shù)據(jù)的長(zhǎng)時(shí)間分析、統(tǒng)計(jì)和查詢,同時(shí)也負(fù)責(zé)完成與綜合管控平臺(tái)類系統(tǒng)的對(duì)接和數(shù)據(jù)交互等功能。
3 智能化典型開采模式分析
(1)中厚煤層智能化開采模式。該模式需具備較好地質(zhì)條件,因此在這類開采模式下更容易取得相關(guān)技術(shù)和裝備研究上的突破。例如在黃陵礦區(qū)中厚煤層進(jìn)行了無人操作有人巡視干預(yù)的智能化開采模式,該模式在陜北地區(qū)大型礦井薄及中厚煤層也取得較好的應(yīng)用效果,特別是在陜北侏羅紀(jì)4-3煤層1.1 m薄煤層開采方面,涼水井煤礦、張家峁煤礦在薄煤層上進(jìn)行了大膽嘗試和創(chuàng)新,在設(shè)備精小化、電纜自動(dòng)張緊、設(shè)備可靠性等方面取得了較好的應(yīng)用效果。
(2)大采高工作面人機(jī)環(huán)高效開采的模式。大采高工作智能化在大空間強(qiáng)礦壓的條件下,在開采過程中容易造成圍巖失穩(wěn)、形成片幫、冒頂?shù)葐栴},在大采高智能化開采過程中對(duì)煤壁片幫預(yù)測(cè)監(jiān)測(cè)、壓力綜合分析等方面要求更高。目前在曹家灘煤礦正在開展10 m超大采高智能化開采的相關(guān)研究工作,屬于國內(nèi)外最大的一次采全高項(xiàng)目。
(3)綜放工作面智能化控制與人工干預(yù)輔助放煤模式。放頂煤工作面在一次采全高的的基礎(chǔ)上應(yīng)注重采放協(xié)同高效連續(xù)開采,在放煤機(jī)構(gòu)實(shí)時(shí)監(jiān)測(cè),通過聲音和圖像等方式判斷放煤過程方面都在進(jìn)行研究。但目前綜放工作面主要還是以時(shí)序控制放煤加人工干預(yù)放煤,優(yōu)化智能調(diào)整放煤時(shí)間的方式為主。
(4)復(fù)雜地質(zhì)條件下“機(jī)械化+智能化開采”模式。該模式最為復(fù)雜,因地質(zhì)條件復(fù)雜,在如何解決液壓支架自支撐、鄰架拉架、底推、頂梁支擠等控制方式上還需進(jìn)一步研究。對(duì)復(fù)雜難采煤層應(yīng)從裝備及系統(tǒng)穩(wěn)定性如何提高,如何最大程度降低現(xiàn)場(chǎng)操作人員的工作強(qiáng)度,如何提高復(fù)雜煤層總體的安全水平上進(jìn)行重點(diǎn)突破,不宜配置過多和過于復(fù)雜的智能化系統(tǒng)和裝備,可適當(dāng)配置處于研發(fā)試驗(yàn)階段的智能技術(shù)和裝備。
4 智能化開采的相關(guān)思考
4.1 智能化開采工作面驗(yàn)收上相關(guān)注意事項(xiàng)
考慮到我國煤炭資源分布廣泛、煤層賦存情況復(fù)雜多樣等實(shí)際情況,近期國家和行業(yè)相繼出臺(tái)了《智能化采煤工作面分類、分級(jí)技術(shù)條件與評(píng)價(jià)》和驗(yàn)收辦法等文件,鼓勵(lì)有條件和基礎(chǔ)的礦井進(jìn)行相關(guān)的研究和攻關(guān)工作,絕大部分礦井可以等待部分試驗(yàn)礦井對(duì)相關(guān)的技術(shù)和裝備成熟后直接應(yīng)用相關(guān)成果。
對(duì)相關(guān)文件和要求中涉及到的幾個(gè)子系統(tǒng)功能應(yīng)合理考慮,例如對(duì)工作面巡檢機(jī)器人應(yīng)根據(jù)實(shí)際需要和布置空間的合理考慮,在個(gè)別具備條件的情況下開展試驗(yàn)。工作面不間斷電源應(yīng)重點(diǎn)考慮運(yùn)輸巷集控中心主機(jī)和各系統(tǒng)的主機(jī)在斷電時(shí)的應(yīng)急供電,主要是為了解決系統(tǒng)重新上電需要配置相關(guān)參數(shù)和重新登錄系統(tǒng)等問題。多倍變焦攝像頭應(yīng)根據(jù)實(shí)際實(shí)施單位情況不需要全部配置該類攝像頭,可選擇性的在超前支架、端頭支架、設(shè)備列車等處適量選用。對(duì)抑塵點(diǎn)智能聯(lián)動(dòng)可通過對(duì)抑塵點(diǎn)增加相應(yīng)的電磁閥組實(shí)現(xiàn)和系統(tǒng)聯(lián)動(dòng),在設(shè)備開機(jī)前電磁閥打開抑塵管路,設(shè)備停機(jī)后延時(shí)關(guān)閉電磁閥,關(guān)閉抑塵裝置的方式實(shí)現(xiàn)。對(duì)煤流量非接觸式感知設(shè)備可根據(jù)實(shí)際情況合理配置,實(shí)現(xiàn)主要監(jiān)測(cè)功能即可。
4.2 智能化開采工作面?zhèn)鞲衅髋渲眉跋嚓P(guān)設(shè)備系統(tǒng)投入與效能發(fā)揮方面的思考
智能化開采工作面作為煤礦保障產(chǎn)能的核心板塊,隨著智能化開采的進(jìn)步,工作面系統(tǒng)配置的各類傳感器也逐漸增多,智能化程度越高對(duì)傳感器完好性要求就越高,傳感器出現(xiàn)故障直接影響智能化開采效率。因此綜采工作面?zhèn)鞲衅髟谏a(chǎn)加工、設(shè)備安裝、使用、保養(yǎng)、維護(hù)維修等環(huán)節(jié)受多種因素影響,應(yīng)對(duì)影響智能化系統(tǒng)及傳感器等整體壽命的主要原因進(jìn)行綜合分析和研究。
當(dāng)前一個(gè)配置較高的智能化工作面單純?cè)谥悄芑嚓P(guān)設(shè)備和系統(tǒng)的投資大多數(shù)都在2~4千萬元之間,較大的經(jīng)濟(jì)投資如何提高智能化相關(guān)系統(tǒng)的可靠性和充分發(fā)揮各系統(tǒng)和設(shè)備的效能顯得尤為重要。應(yīng)考慮從智能化相關(guān)系統(tǒng)和設(shè)備的生產(chǎn)源頭開始抓起,在生產(chǎn)、組裝、調(diào)試、使用、維護(hù)到管理等全過程管控,找出各薄弱環(huán)節(jié),并針對(duì)性地提出解決和提升方案,建立生命周期模型,來保證智能化系統(tǒng)及裝備的可靠性,充分發(fā)揮綜采智能化的作用和智能化的經(jīng)濟(jì)價(jià)值,保證智能化系統(tǒng)可靠、穩(wěn)定、長(zhǎng)時(shí)間運(yùn)行,保障綜采工作面高效、穩(wěn)定、低成本運(yùn)營。同時(shí)應(yīng)考慮和建立智能化系統(tǒng)相關(guān)傳感器完好率對(duì)智能化開采的影響關(guān)系等關(guān)系模型。
5 結(jié)語
煤礦智能化的發(fā)展需要國家和行業(yè)的支持,需要科研院所和煤炭企業(yè)等多方共同努力,在進(jìn)行智能化開采的過程中,各煤礦應(yīng)結(jié)合自身?xiàng)l件多方位全面考慮,采用適合本礦井智能化開采工作面的解決方案,以實(shí)現(xiàn)綜采工作面的經(jīng)濟(jì)、安全、高效、節(jié)能、智能化發(fā)展。
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
防爆電機(jī)(2022年1期)2022-02-16 01:14:06
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
印刷工業(yè)(2020年4期)2020-10-27 02:45:52
模具制造(2019年3期)2019-06-06 02:10:54
中國交通信息化(2017年4期)2017-06-06 07:21:52
能源(2015年8期)2015-05-26 09:15:56
航天器工程(2014年5期)2014-03-11 16:35:55
河南科技(2014年18期)2014-02-27 14:14:58
