預制疊合板構件智能化識別與檢測方法
2022-03-07 02:35:05楊陽李青澤姚剛
土木建筑與環境工程 2022年1期
關鍵詞:機器視覺
楊陽 李青澤 姚剛




摘 要:預制疊合板構件質量問題是導致施工現場預制構件不能順利安裝的重要因素之一。提出了一種基于機器視覺的智能化檢測預制疊合板構件的方法。首先通過預制構件生產線上的攝像系統進行圖像采集,然后通過濾除噪聲對圖像進行預處理,通過Canny算子對邊緣特征進行提取,通過Harris角點檢測算法對圖像內部特征進行提取,并將提取出的信息與已儲存信息進行對比。利用該方法對三塊預制疊合板試件進行特征識別及分析,結果表明:該檢測方法可以識別預制疊合板尺寸信息,識別預留孔洞及預埋件的數量、尺寸及位置信息,對預制疊合板特征信息進行檢測,并判斷構件是否合格,提高了出廠構件的合格率,從而減少了施工成本,降低了工期延誤風險。
關鍵詞:預制疊合板;機器視覺;試驗研究;圖像處理;智能化檢測
中圖分類號:TU741.2 ? 文獻標志碼:A ? 文章編號:2096-6717(2022)01-0087-07
收稿日期:2020-07-10
基金項目:國家重點研發計劃(2019YFD1101005、2016YFC0701909);中央高校基本科研業務費(2020CDJQY-A067)
作者簡介:楊陽(1986- ),女,博士,主要從事土木工程施工、橋梁風工程研究,E-mail:yy20052710@163.com。
姚剛(通信作者),男,教授,博士生導師,E-mail:yaocqu@vip.sina.com。
Abstract:
The quality problem of prefabricated laminated slab (PLS) is one of the important factors that lead to the failure of prefabricated components in construction.A method of intelligent detection of PLS based on machine vision is presented in this paper. First, the image is collected through the camera system on the production line of PLS, and then the image is preprocessed through noise removal. The Canny algorithm is used to extract the edge features, and Harris corner detection algorithm is used to extract the internal features of the image.The extracted information is compared with the stored information.This method is used to identify and analyze the features of three PLS. The results prove that intelligent detection method can be used for image acquisition and image preprocessing of PLS,and the characteristics of the statistics, the size of PLS, the number, size and location information of reserved holes and embedded parts.Intelligent detection method can quickly detect and judge whether the PLS is qualified. It can improve the pass rate of factory components and reduce the return rate of components, and hence reduce the construction cost and the risk of project delay.
Keywords:prefabricated laminated slab (PLS); machine vision;experimental investigation; image processing; intelligent detection
預制疊合板構件因其整體性能好、生產周期短、模板利用率高等優點,在裝配式住宅體系中廣泛應用,成為裝配式建筑中最常用的水平構件[1-3]。預制疊合板在生產時已經進行深化設計,能夠顯著降低施工難度,減少現場施工強度,縮短施工工期,使裝配式建筑的品質得到提高,還能減少施工現場的建筑垃圾,實現綠色施工。
在裝配式住宅體系中,照明系統、消防系統、強電系統需要在疊合板中設置預埋件,消火栓給水系統、污水系統、雨水系統、煙道及風井洞口需要在疊合板中設置預留洞口。在生產過程中,由于施工制圖階段專業間配合不到位、深化設計精細度不夠、制造技術和生產工藝的失誤等原因,會引起疊合板上的預留洞口、預埋件缺失或位置出現偏差,在進行安裝時需現場進行二次處理或者進行返廠處理,會導致建造成本增加,施工進度滯后,工期延誤風險增大[4]。在施工現場進行鋼筋切除、定位開孔等加工修正處理,因條件限制,精度較低,可能會導致后期澆筑時發生漏漿、成型質量差等問題。預制疊合板構件出廠前,常規的人工檢測方法檢測效率較低,并且存在不可避免的人為影響誤差。
機器視覺檢測技術因高效快速而被應用于水表檢測[5]、光伏電池缺陷識別[6]、結構損傷檢測[7-9]、軸承尺寸誤差檢測[10]、清水混凝土表面缺陷檢測中[11-12],取得了較好的效果,但目前還未見將機器視覺技術應用到預制疊合板構件檢測的相關研究。筆者提出一種基于機器視覺的智能化檢測預制疊合板構件深化設計內容的方法,可以通過圖像特征統計與分析,一次性快速提取預制疊合板構件中的特征信息,并與已知的預制疊合板構件尺寸信息進行比較,可準確檢測出預制疊合板尺寸及深化設計內容是否滿足要求,并給出預制疊合板構件不合格的原因。該方法能夠提高檢測速度,增強檢測結果的準確性,從而降低預制疊合板構件的返廠率,降低工期延誤的風險。
1 試驗
1.1 試件生產
選取疊合板深化設計中的預留排水管洞口(D160-C)、給水管洞口(D100-C)、預埋件(D80-E)為試驗參數,標準疊合板構件的長度為2.82 m,寬度為0.79 m,厚度為60 mm。標準疊合板的尺寸及相關信息已經錄入信息管理系統,并建立了標準板模型坐標系統。預留排水管洞口(D160-C)、給水管洞口(D100-C)、預埋件(D80-E)的尺寸和位置如圖1所示,排水管洞口、給水管洞口及預埋件的直徑分別為160、100、80 mm。
將1塊標準疊合板構件和2塊不合格疊合板構件進行對比分析,不合格疊合板構件設置為洞口、預埋件偏移和洞口、預埋件位置缺失,3個疊合板構件分別命名為PC-S-1、PC-C-2、PC-C-3,具體參數如表1所示。
1.2 試驗方案及測試方法
1.2.1 試驗方案
通過機器視覺對預制疊合板進行識別的過程中,識別結果的精度主要取決于圖像的質量,因此,需要盡量減少干擾因子和不確定變量。所研究的預制疊合板構件智能化檢測技術中采用了二維尺寸拍攝系統,系統由支架、垂直照射的面光源、工業相機、存儲端、識別端組成,圖2給出了智能化檢測技術硬件系統,疊合板構件的原始采集圖像如圖3所示。
1.2.2 識別方法
在圖像產生、傳輸和復制過程中,常常會因為多方面原因而被噪聲干擾或出現數據丟失,降低了圖像的質量(比如某一像素點與它周圍像素點相比有明顯的不同,則該點被噪聲所感染)。目前常用的圖像平滑方法為均值濾波、中值濾波和高斯濾波[13-14]。
均值濾波法不能很好地保護圖像細節,在圖像去噪的同時也破壞了圖像的細節部分,從而使圖像變得模糊,不能很好地去除噪聲點。中值濾波法對高斯噪聲的抑制存在明顯不足。Gauss濾波器對圖像平滑去噪時,每一個像素點的值都由其本身和鄰域內的其他像素值經過加權平均后得到,更適用于本方法中的圖像去噪。
對疊合板預制構件圖像進行二值化處理時,需要提取試件中的特征信息。因此,需要選取適當的閾值將圖像的背景與特征目標進行分離。目前已有的方法有Otsu法、迭代法、基于谷底最小值的閾值、灰度平均值法[15-16]。Otsu法計算速度快,受圖像的亮度及圖像色彩的對比度影響小,筆者選擇Otsu法進行閾值的確定,完成圖像二值化分割。
疊合板預制構件圖像進行角點檢測時,需要通過角點檢測算子,對圖像的每個像素計算角點響應函數并閾值化,根據實際情況選擇閾值,對閾值化的角點響應函數進行非極大值抑制,并獲取非零點作為角點。通過一個小的滑動窗口在鄰域檢測角點,在任意方向上移動窗口,若窗口內的灰度值都有劇烈的變化,則窗口的中心就是角點。Harris 角點檢測算法對噪聲不敏感,具有平移和旋轉不變性、高重復性和高信息量, 而且在不同光照條件下具有良好的穩定性[17]。Harris角點檢測算法不適用于對尺度變化要求高的情況。在預制疊合板構件檢測過程中,尺度變化不大,因此選擇了Harris角點檢測算法。
圖像邊緣特征提取方法主要有Roberts算子、Sobel算子、Prewitt算子、Laplace算子及Canny算子。
由圖4可知,Roberts算子處理的圖像對邊緣的保留效果比較好,并且Roberts算子對噪聲有很強的抑制力,但是圖像邊緣并不完全連通,缺失較多。Sobel算子處理的圖像能夠保留絕大多數的圖像邊緣,但對噪聲比較敏感。Prewitt算子保留的圖像邊緣較多,但圖像邊緣仍有小范圍的斷開,并且噪聲對Prewitt算子影響更加明顯,因為噪聲影響導致圖像處理過程中出現了部分虛假邊緣。Laplace算子對噪聲具有較強的抑制性,處理的圖像邊緣較清晰,但并不完全連通。Canny算子處理的圖像邊緣保留比較完整,邊緣視覺效果較清晰,且對噪聲具有較強的抑制性。因此,應用Canny算子對圖像邊緣特征進行提取。
1.2.3 檢測流程
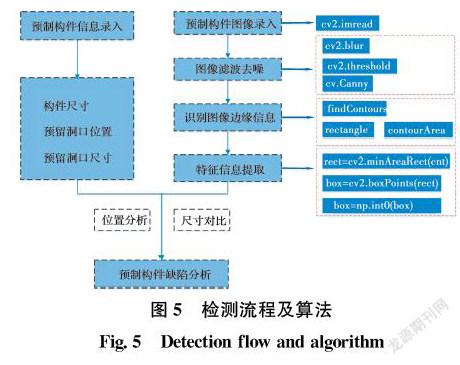
為了統計并提取疊合板構件中的相關信息,去除圖像在采集和數字化過程中產生的噪聲,應用加權平均法對圖像進行灰度歸一化處理,并進行中值濾波處理,突出圖像的灰度層次和邊緣特征[5]。通過Otsu法進行閾值的確定,完成了圖像的二值化分割[10]。基于Canny算子對圖像邊緣特征進行提取,將攝取目標轉換成圖像信號,傳送給圖像處理系統,根據像素分布和亮度、顏色等信息,轉變成數字化信號。基于轉化的信號信息,圖像系統進行目標的特征提取,消除不必要的背景,增強不合格疊合板構件的表現形式。程序使用Python編寫,在OpenCV平臺中實現,檢測流程及算法如圖5所示。
2 試驗結果與討論
2.1 圖像預處理
圖像灰度化處理是將彩色圖像變成灰度圖像的過程。彩色圖像中的像素由R、G、B三個分量表述,各分量的變化范圍為0~255,每一個分量都有256個級別亮度,因此,每個像素都可以表述16 777 216種顏色,其信息量較大。灰度圖像的R、G、B三個分量相等,灰度值由255減小到0,是從全白變成全黑的過程,將圖像進行灰度化處理后,可以減少計算量。受測量設備和周圍環境的影響,圖像會產生大量噪聲,為去除噪聲,灰度歸一化后進行中值濾波處理,采用3×3模板的中值濾波,效果如圖6所示,圖像灰度歸一化及濾波后輪廓較為清晰。
2.2 圖像識別與分析
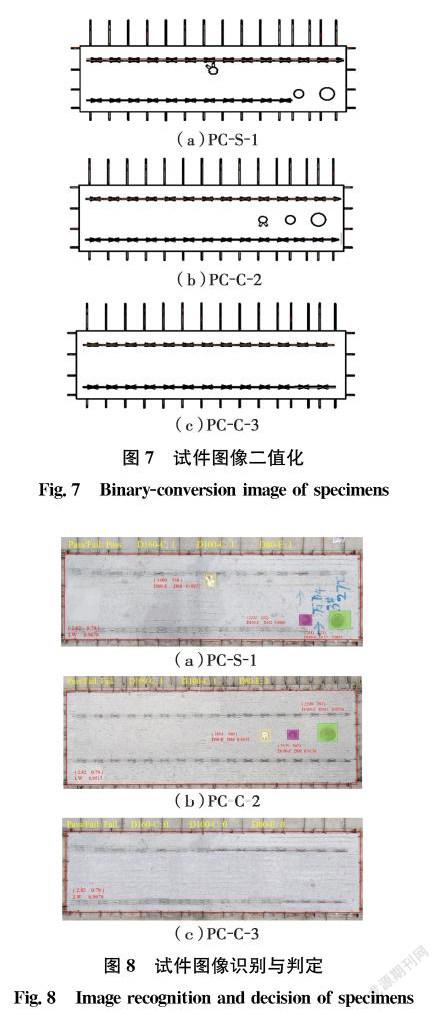
通過基于機器視覺的預制疊合板構件智能化檢測技術對PC-S-1、PC-C-2、PC-C-3試件進行識別,識別結果如圖8所示。每個圖像識別處理時間均小于1.0 s,識別結果中的內容有:構件是否通過檢測、輪廓尺寸、不同類型預留孔洞、預埋件的個數、坐標參數、直徑、置信度,并用不同顏色對識別結果進行顯示。
由圖8可知,基于機器視覺和BIM技術的預制疊合板構件智能化檢測技術對預留洞口和預埋件的數量識別結果正確率為100%,能夠準確識別預留洞口和預埋件的個數,推測其能有效識別特征信息的數量。圖8顯示,PC-S-1構件合格(Pass),PC-C-2及PC-C-3構件不合格(Fail),對PC-S-1、PC-C-2、PC-C-3構件是否合格的判斷正確率為100%。
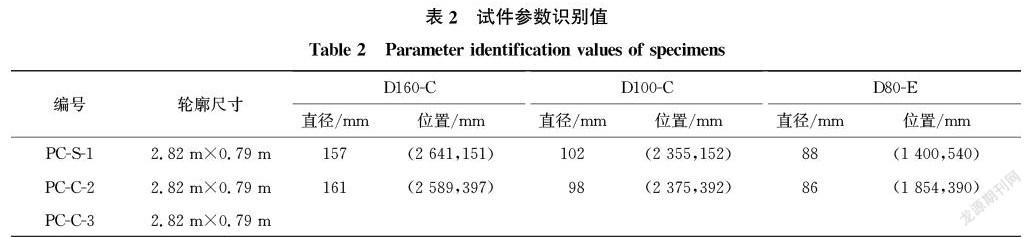
3個預制疊合板構件輪廓尺寸判斷結果顯示在圖8各圖左下方,輪廓尺寸判斷結果為小數點后兩位,顯示結果均為正確,置信率分別為0.967 8、0.951 7、0.997 9。PC-C-3構件置信率最高,PC-S-1、PC-C-2構件置信率差別較小,由結果推測,當預制疊合板構件上無預埋件、預留洞口等給排水設計時,其邊緣特征識別結果更準確,內部特征信息對邊緣特征識別有一定的影響,隨著內部特征信息增加,邊緣特征識別精度降低。
根據表2中數據對比輪廓尺寸、預留洞口和預埋件的尺寸識別結果,發現D160-C、D100-C、D80-E的識別標準方差分別為2.08、2.0、4.163,預埋件識別精度最低。對比預留洞口和預埋件的位置識別結果發現,預留孔洞位置識別精度高于預埋件。在檢測過程中,對輪廓尺寸識別效果最好,D160-C、D100-C預留孔洞次之,D80-E預埋件識別效果最差。推測其原因為預埋件形狀不規則,影響了識別效果,而文中提出的檢測方法對規則幾何尺寸信息的識別準確性更高。
設計的測量系統分為硬件部分和軟件部分,因此,測量誤差主要來源是硬件誤差和軟件誤差。硬件誤差主要來源有3個方面:1)相機在標定時產生的誤差。相機進行標定的時候獲取的是像素級別的點坐標,所以后續會對預制疊合板的測量精度產生一定影響;2)量化誤差。該誤差與相機分辨率相關,對于邊緣突變的像素點,相機的分辨率越高,得到的圖像位置誤差越小。相機內部的傳感器也會對測量結果產生一定的影響;3)相機鏡頭因為光線折射產生的畸變誤差。如果鏡頭的對焦方式是手動對焦,不能保證靶面與像平面重合,這些將對測量結果產生一定的影響。軟件誤差指的是在圖像處理的過程中將模擬信號離散化也會對尺寸產生不同程度的影響,而且在進行尺寸擬合時算法的復雜性也會對測量結果產生誤差。因此,當預制疊合板構件誤差較小,只是制作精度有一定欠缺時,可從提高相機的分辨率、減小鏡頭畸變程度、對環境光源進行布置和選擇、提高圖像處理精度方面進行改進,最終達到檢測要求。
3 結論
基于機器視覺技術,提出一種針對預制疊合板構件尺寸及深化設計內容的智能化檢測方法。首先通過預制構件生產線上的攝像系統進行圖像采集,然后濾除噪聲,對圖像進行預處理,通過Canny算子對邊緣特征進行提取,通過Harris角點檢測算法對圖像內部特征進行提取,并將提取出的信息與已儲存信息進行對比。通過研究得到以下結論:
1)該方法能檢測出預制疊合板構件預留孔洞及預埋件的個數、位置及尺寸偏差。
2)該方法能對預制疊合板構件特征信息的數量進行正確識別,并對構件是否合格進行分析。構件的內部特征信息對其邊緣特征識別有一定的影響,隨著內部特征信息的增加,邊緣特征識別精度降低。當識別不規則形狀時,該方法識別精度有所下降,對較大尺寸的構件識別精度更好。
3)該方法對預制疊合板構件中構件尺寸、預留孔洞、預埋件的位置和尺寸可進行非接觸檢測,整體檢測精度較高,可以有效解決因預制疊合板構件質量問題導致的返工和誤工。參考文獻:
[1] 黃煒, 羅斌, 李斌, 等. 不同構造形式綠色混凝土疊合板受彎性能試驗[J]. 湖南大學學報(自然科學版), 2019, 46(7): 35-44.
HUANG W, LUO B, LI B, et al. Experiment on flexural behavior of green concrete composite slab with different structural forms [J]. Journal of Hunan University (Natural Sciences), 2019, 46(7): 35-44. (in Chinese)
[2] ?CAO X Y, LI X D, ZHU Y M, et al. A comparative study of environmental performance between prefabricated and traditional residential buildings in China [J]. Journal of Cleaner Production, 2015, 109: 131-143.
[3] ?YAO G, WANG M P, YANG Y, et al. Development and analysis of prefabricated concrete buildings in Chengdu, China [J]. International Journal of Sustainable Developmentand Planning, 2020, 15(3): 403-411.
[4] 周基紅. 預制裝配式建筑施工常見質量問題[J]. 建材與裝飾, 2019(23): 1-2.
ZHOU J H. Common quality problems in prefabricated building construction [J]. Building materials and decoration, 2019(23): 1-2. (in Chinese)
[5] 陳碩, 劉豐, 唐旭晟, 等. 基于機器視覺技術的水表在線檢定系統研究[J]. 計量學報, 2017, 38(4): 473-476.
CHEN S, LIU F, TANG X S, et al. Research on on-line water-meter verification system based on computer vision technology [J]. Acta Metrologica Sinica, 2017, 38(4): 473-476.(in Chinese)
[6] ?DEITSCH S, CHRISTLEIN V, BERGER S, et al. Automatic classification of defective photovoltaic module cells in electroluminescence images [J]. Solar Energy, 2019, 185: 455-468.
[7] ?CHA Y J, CHOI W, SUH G, et al. Autonomous structural visual inspection using region-based deep learning for detecting multiple damage types [J]. Computer-Aided Civil and Infrastructure Engineering, 2018, 33(9): 731-747.
[8] ?DENG J Y, ZHANG W H, YANG X M. Recognition and classification of incipient cable failures based on variational mode decomposition and a convolutional neural network [J]. Energies, 2019, 12(10): 2005-2023.
[9] ?ZHOU P, ZHOU G B, ZHU Z C, et al. Health monitoring for balancing tail ropes of a hoisting system using a convolutional neural network [J]. Applied Sciences, 2018, 8(8): 1346-1359.
[10] 范帥, 湯綺婷, 盧滿懷. 基于機器視覺的軸承內外圈尺寸檢測及分類[J]. 自動化儀表, 2016, 37(11): 77-80, 87.
FAN S, TANG Q T, LU M H. Detecting and classifying the inner-outer ring sizes of bearings based on machine vision [J]. Process Automation Instrumentation, 2016, 37(11): 77-80, 87.(in Chinese)
[11] ?WEI F J, YAO G, YANG Y, et al. Instance-level recognition and quantification for concrete surface bughole based on deep learning [J]. Automation in Construction, 2019, 107: 102920.
[12] ?YAO G, WEI F J, YANG Y, et al. Deep-learning-based bughole detection for concrete surface image [J]. Advances in Civil Engineering, 2019, 2019: 1-12.
[13] ?SUNEETHA A, SRINIVASA REDDY E. Robust Gaussian noise detection and removal in color images using modified fuzzy set filter [J]. Journal of Intelligent Systems, 2020, 30(1): 240-257.
[14] ?GOYAL B, DOGRA A, AGRAWAL S, et al. Image denoising review: From classical to state-of-the-art approaches [J]. Information Fusion, 2020, 55: 220-244.
[15] 楊馥溢, 何嘉. 基于深度學習的圖像檢索研究[J]. 計算機與數字工程, 2019, 47(9): 2276-2280, 2285.
YANG F Y, HE J. Research on image retrieval based on deep learning [J]. Computer & Digital Engineering, 2019, 47(9): 2276-2280, 2285. (in Chinese)
[16] 趙世峰, 何皙健. 基于OpenCV的復雜環境下圖像二值化方法[J]. 電子測量技術, 2018, 41(6): 55-59.
ZHAO S F, HE X J. Binarization method for images acquired under complex environment based on OpenCV [J]. Electronic Measurement Technology, 2018, 41(6): 55-59. (in Chinese)
[17] 朱思聰, 周德龍. 角點檢測技術綜述[J]. 計算機系統應用, 2020, 29(1): 22-28.
ZHU S C, ZHOU D L. Review on image corner detection [J]. Computer Systems & Applications, 2020, 29(1): 22-28. (in Chinese)
(編輯 黃廷)
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30