PID自整定控制系統設計
2022-03-29 06:14:21陳金寶
科技風 2022年9期
關鍵詞:系統
摘 要:本文主要內容是PID自整定控制系統設計,運用PID自整定技術對電動機轉速進行實時調節,在短時間內達到新的平衡點。這樣可以有效地解決控制困難和控制精度不高等難題,能夠提高控制質量和系統穩定性。
關鍵詞:PID自整定;實時調節
1 緒論
1.1 課題研究的背景及意義
電動機的發展在工業生產方面最能展現其優越性,在節省大量的勞動力的同時,又可以很大程度地提升生產力,是現代生活中不可缺少的替代品。對電動機的精準控制不僅能優化產品質量,還能體現現代化生產的優勢。目前我國的電動機雖然種類繁多,但都沒有得到很好運用和發展,在很多情況下都是大材小用,因此需要我們研究和推廣高效電動機。采用PID自整定控制的電動機可以解決資源浪費現象,真正實現現代生產理念。在現代生產生活中,用PID控制的電動機成為最受歡迎的控制器,它快速的整定效果已達到高精度控制,但電動機面臨的巨大難題是其參數難以控制,阻礙了其發展。
傳統的PID算法參數的調節時間非常長,即使有經驗的工程師也得需要很長的控制時間,難以滿足在生產中的需要,浪費人力物力。有些整定方法有相對較好的控制效果,但必須要經過很長的控制時間,而整定時間短的則達不到理想的控制效果,所以在以后的發展方向上主要是在提高控制效果,縮短控制時間。到現在為止,越來越多的PID整定方法被開發出來,以滿足不同的需求,根據環境的不同,選擇合適的整定方法至關重要。如何選用較為簡單快捷的算法,在生產生活中具有重要意義。
1.2 PID自整定的國內外發展現狀
1922年米羅斯基提出PID的概念,根據位置控制系統,總結出了控制規律公式。20世紀30年代,由于技術原因并未得到推廣。10年之后,自動調節器才被研發出來,當時人們的認知水平和購買能力有限而沒有被推廣。1942年以后,PID控制器在參數的調整方面取得了很大的進步,各式各樣的控制方法被人們所推廣,出現了諸如最優PID控制、預估PID控制、自適應PID控制等高級PID控制策略。由于PID控制器使用方便,結構簡單,才使其快速發展,被越來越多的人使用。
目前電動機的發展比較迅速,對電動機的控制方面有很大空間的提升。在國內,PID控制器的研究還處于剛剛起步的狀態,其控制器實際運用還是比較少的,同時研發和銷售PID控制器的商家也比較少,國外的PID參數整定技術的研究起步比較早,相對國內來說技術已經比較成熟。自PID控制理論的提出到現在已有100多年的歷史,PID控制器也得到了飛速發展,目前市場上的PID控制器種類繁多,價格也隨著控制效果的不同大有差異。
傳統PID控制器主要是根據偏差來控制參數,如果輸入值突變,則很容易產生超調,損壞PID調節器。另外PID參數必須是在動態特性下完成的,如果在控制過程中負載突然變化,這是必須重新整定。
1.3 電動機的PID自整定的控制特點
電動機的PID自整定也包括開環和閉環控制,開環控制系統一般指在控制電路中瞬間完成,不需要對其結果分析。而閉環控制系統可以將結果反饋與設定值做對比,并根據其偏差的大小調整整個系統的穩定,進而實現自動整定的效果。
用PID自整定控制的電動機在創新上有以下特點:
(1)通過改進后的電動機控制具有轉速設置和顯示功能,這種設計方法可以不用有人在現場調控就可以正常運轉,實現遠程操控。還具有遠距離傳輸控制,手動修改參數的功能,較以前的功能比較有了很大程度的提升。
(2)過去控制器的參數比較簡單,控制效果也不能滿足所需要的要求,參數優化的改進方法遠遠跟不上現實的需要。改進后的PID參數自整定控制,具有參數實時調整功能,調節的效果要比過去的控制好得多。
2 電動機數學模型及PID自整定算法
2.1 電動機的調速方法
電動機的調速方法是利用PID控制輸出PWM高電平的輸出時間,通過調節占空比改變電壓實現對電動機轉速的控制。
電動機的速度VD=VMAX×D,其中D為占空比,VMAX是電動機的最大轉速,所以,根據上式中改變D的大小就可以實現電動機的轉速調節。
PWM脈沖與電壓的關系如圖1所示。
2.2 PID自整定算法
所謂的PID控制算法,是由比例環節P、積分環節I和微分環節D組成。主要應用在閉環控制系統中,將輸出值與設定值之間的偏差通過線性關系構成的控制量,對被控參數進行調控,具有反饋功能的電路才能實現被控變量的實時控制。
PID控制系統是由輸入、PID控制器、被控對象和輸出等四部分組成。
PID控制系統方框圖如圖2所示。
其輸入e(t)與輸出u(t)關系為:
PID控制器的傳遞函數公式為:
PID控制思想被應用在計算機控制系統中,可以更精確地調整參數,以達到精準控制的目的。調節器的輸出與輸入之間的關系為:
式中:Kc表示比例系數;Ti是積分時間常數;Td是微分時間常數;T為采樣周期;e(kT-T)為第(K-1)次采樣的輸入偏差值;K是采樣序號,取值范圍是0、1、2、3……
2.3 電動機的PID自整定算法
2.3.1 位置式PID控制
位置式PID控制方框圖如圖3所示。
位置式PID控制器的輸出如下式所示:
上式中:U(k)控制器的輸出;e(k)控制器的輸入;Kp比例放大系數;Ti積分時間常數;Td微分時間常數。
位置式PID控制器中單時刻輸出獨立性的,e(k)需要累加和儲存,這樣就加大了計算機的內存,增加負載。
2.3.2 增量式PID控制
與位置式PID算法相比,增量式PID算法要保存前三次取樣的數值誤差,根據誤差反饋進行整定,計算量小,因此得到了廣泛的使用。其輸出為:
經式(5)和式(6)整理得:
上式中:Kp比例放大系數;Ti積分時間常數;Td微分時間常數。
增量式PID控制的計算量要比位置式PID控制小得多,在實際應用中也比較常見。
2.4 PID控制器參數對控制性能的影響
PID控制器參數的取值決定了PID控制器的質量,其中動態性能和穩態性能起著決定性的作用,PID的整定方法主要是比例環節、積分環節和微分環節的共同整定的結果,下面是比例、積分、微分的作用。
(1)比例作用:比例系數是用來調節速度的,系數越大,調節幅度就越大,偏差減小的趨勢更快,這樣的后果是容易造成系統的不穩定。選擇合適大小的比例系數在整定過程中至關重要。
比例調節的特性曲線如圖4所示。
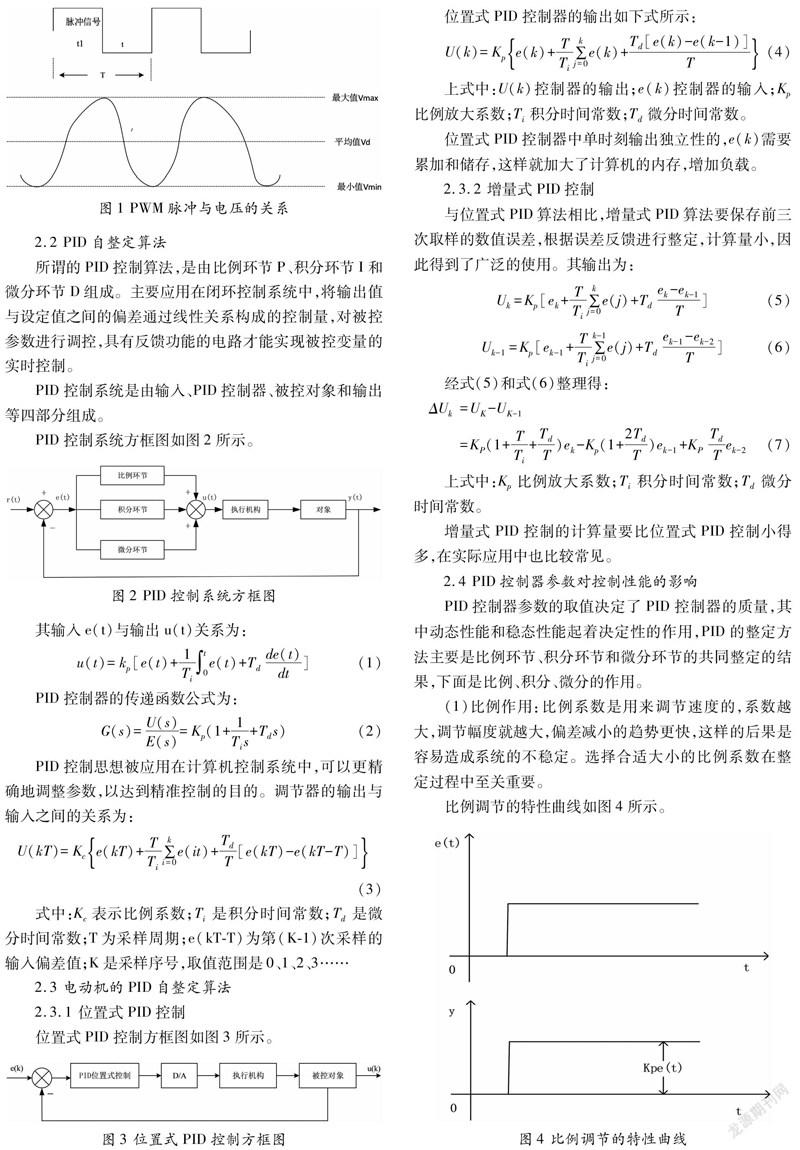
(2)積分作用:主要是用來消除系統穩態誤差,只要有穩態誤差的存在,積分作用就必須運行,直至系統中穩態誤差為零。由于很難消除系統的穩態誤差,所以積分作用會影響控制效果,使系統穩定性下降。
積分調節的特性曲線如圖5所示。
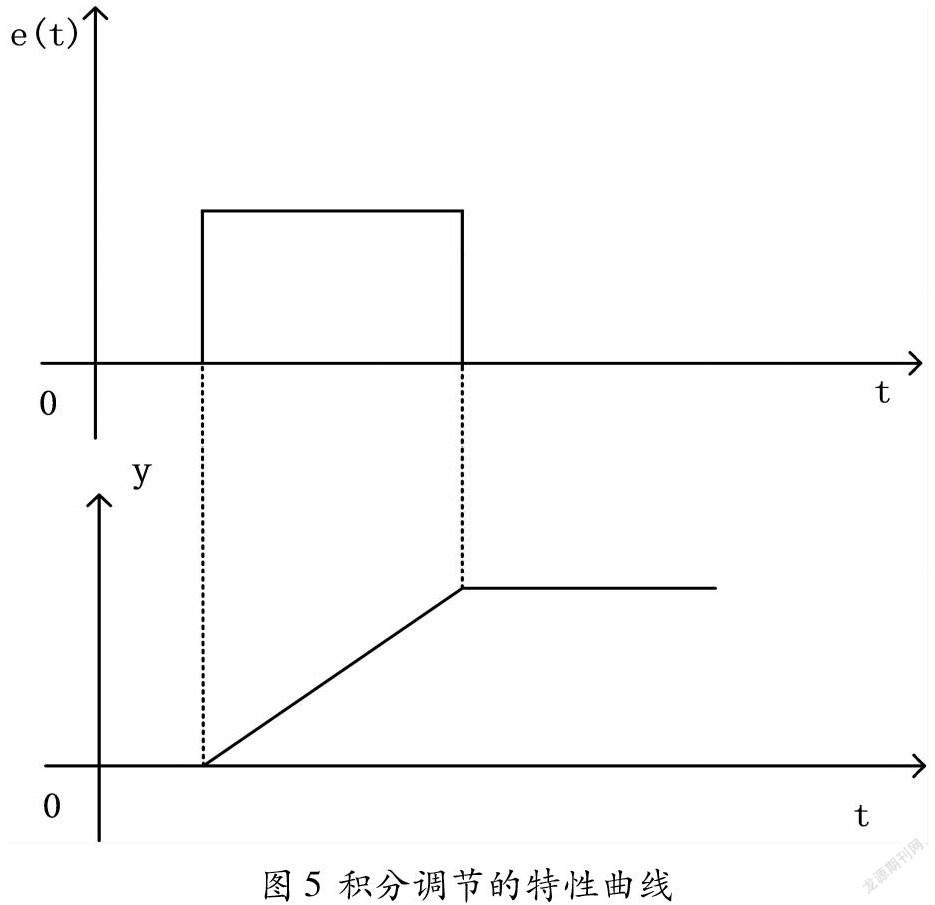
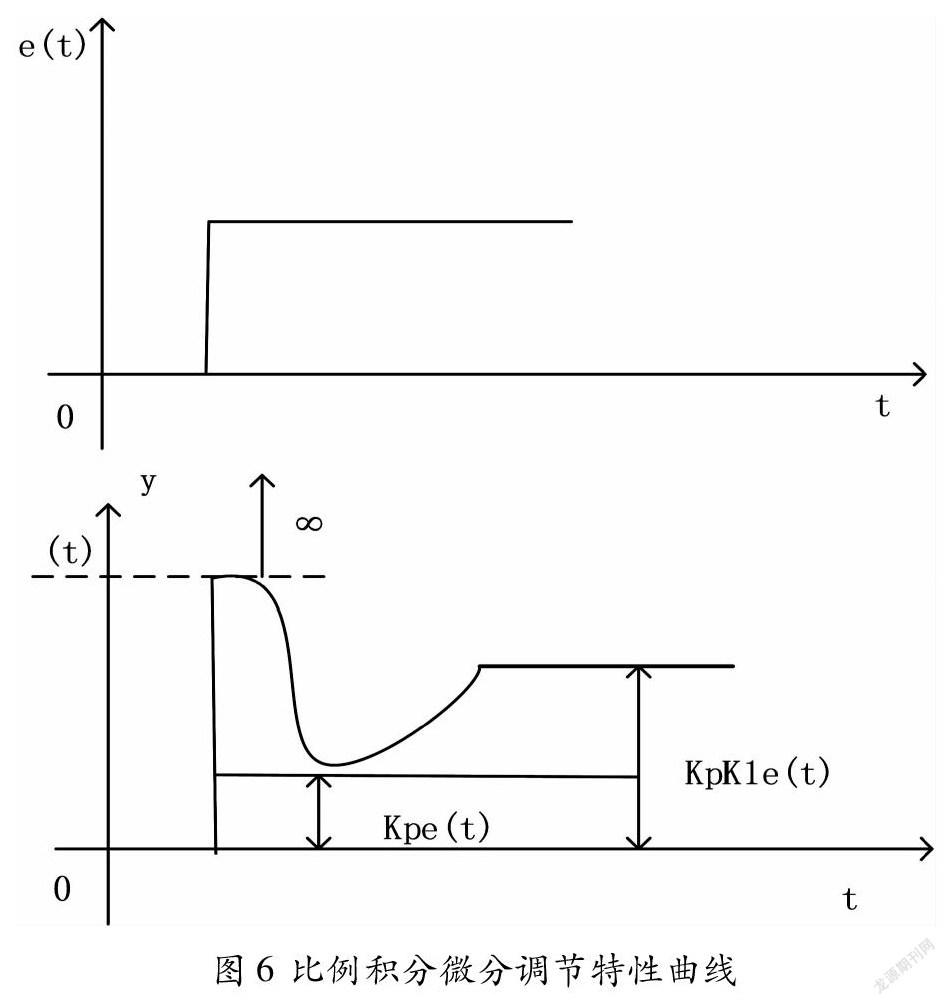
(3)微分作用:微分主要抑制偏差的產生,當設定好輸入值時,微分作用開始工作,將輸出值的大小整定到輸入值,這就將偏差的大小降低,微分作用還有超前的抑制作用,它能提前預知偏差的走勢,在偏差還沒生成之前就抑制其產生,可以提高系統穩定性,不會造成參數突變帶來的影響。但是微分作用也有其弱點,它也能放大噪聲干擾,如果微分作用很強的話,就容易將系統中的噪聲放大,降低系統抗干擾能力。
比例積分微分調節特性曲線如圖6所示。
2.5 本章小結
本章主要針對位置式PID控制算法與增量量式PID算法在算法公式上做比較,控制原理上沒有什么區別,但在整定過程中增量式PID算法有以下優點:
(1)位置式PID算法輸出需要聯系整個過去的狀態,在計算過程中要用到過去誤差的累加值,就會有增量誤差產生,影響控制精度。增量式PID要保留前三次取樣的差值,經過計算機的處理之后,才能達到較好的控制效果。
(2)位置式PID算法從手動切換到自動時,要將計算機的輸出值置為原始閥門開度,才能保證系統的穩定和無沖擊切換。增量式PID算法與位置式PID算法不同,其輸出與原始值無關,在手動切換到自動時,不會影響系統的穩定性。
經過位置式PID與增量式PID算法的對比,可以看出,增量式PID算法比位置式PID算法更有優勢,所以本文在參數整定方面選用增量式PID參數整定方法。
3 總結與展望
本課題主要研究的是運用PID參數整定的方法,就現在發展現狀而言,PID發展的方向是在參數整定方面,合理地運用比例、積分、微分調節,尋找其中間點,實現參數的快速整定和提高系統穩定性。
近幾年來,科學技術在不斷更新,如今的控制方式也由人工控制到微機控制的轉變。PID調節在未來的工業生產中應用會越來越廣泛,例如,棒材軋制生產線中活套高度的PID控制,活套高度作為控制目標,采集現場實際活套高度進行比較后,進行PID調節,調節器輸出值疊加到運行的實際轉速上,自動調節上游機架級聯給定速度,以提高軋制生產的穩定性。
參考文獻:
[1]呂文琪.自動門智能控制算法及其可靠性研究[D].南京:南京航空航天大學,2015:13-14.
[2]楊帆.具有pid自整定功能的溫度控制器研究與實現[D].大連:大連理工大學,2006:7-9.
[3]郭唐仕,尹華杰.Buck變換器的數字模糊PID控制[J].電源技術應用,2002,(1):23-25.
作者簡介:陳金寶(1994— ),男,漢族,寧夏吳忠人,本科,研究方向:連軋棒材調速控制系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32