動(dòng)態(tài)環(huán)境下AGV避障軌跡規(guī)劃問(wèn)題研究
2022-04-15 08:56:54何均鋒申艷紅鄒安幫吳婷婷
何均鋒,李 鵬,申艷紅,鄒安幫,熊 威,吳婷婷
(南京林業(yè)大學(xué) 汽車(chē)與交通工程學(xué)院, 南京 210037)
自動(dòng)導(dǎo)引車(chē)(automated guided vehicle,AGV)是指在導(dǎo)航信息的導(dǎo)引下在地面上移動(dòng)的移動(dòng)機(jī)器人[1]。合理的AGV路徑規(guī)劃不但能提高倉(cāng)庫(kù)的貨物周轉(zhuǎn)率和訂單完成效率,也能使AGV的行駛更平穩(wěn)[2]。運(yùn)動(dòng)規(guī)劃是AGV完成作業(yè)任務(wù)運(yùn)動(dòng)控制的基礎(chǔ),直接決定了AGV的工作質(zhì)量[3]。
目前,路徑規(guī)劃算法主要分為基于圖搜索的路徑規(guī)劃、數(shù)值優(yōu)化、基于樣本的路徑規(guī)劃、插值算法這4類(lèi)[4-5]。考慮到實(shí)際應(yīng)用的簡(jiǎn)單性,圖搜索方法比傳統(tǒng)的路徑規(guī)劃策略更有效[6]。例如,Dijkstra和A*算法等經(jīng)典的圖搜索算法都被廣泛用于搜索最短路徑[7-8]。吳鵬等[9]在傳統(tǒng)A*算法的基礎(chǔ)上增加了正反向搜索的機(jī)制,然而其使用范圍只是局限于靜態(tài)障礙物環(huán)境下。Xu等[10]以時(shí)間最優(yōu)為代價(jià)函數(shù),用帶有優(yōu)先約束(TSPP-PC)旅行商問(wèn)題來(lái)表示AGV的路徑規(guī)劃問(wèn)題,并基于精確算法提出了一種啟發(fā)式算法來(lái)進(jìn)行求解。Lim等[11]和Zhang等[12]在Shih等[13]通過(guò)圖搜索器在時(shí)空域中規(guī)劃一個(gè)粗略的軌跡的基礎(chǔ)上進(jìn)行了參數(shù)優(yōu)化計(jì)算,但未考慮與AGV運(yùn)動(dòng)學(xué)相關(guān)的非完整約束,并且障礙物的軌跡被限定,存在局限性。Corman等[14-15]提出將事件動(dòng)態(tài)和連續(xù)時(shí)間動(dòng)態(tài)模型離散,把AGV與碼頭QC和ASC的作業(yè)過(guò)程視為混合流水車(chē)間調(diào)度,以時(shí)間最短為代價(jià)函數(shù),采用啟發(fā)式算法以一種近似最優(yōu)的方法來(lái)求解,但該過(guò)程只考慮靜止障礙物,并未將動(dòng)態(tài)障礙物納入考慮范圍。Xin等[16]在離散事件動(dòng)態(tài)和連續(xù)時(shí)間動(dòng)態(tài)的基礎(chǔ)上提出了滾動(dòng)時(shí)域狀態(tài)監(jiān)測(cè)控制器,以能耗最優(yōu)為代價(jià)函數(shù),采用事件驅(qū)動(dòng)能效算法求解模型,但未對(duì)AGV的碰撞約束進(jìn)行考慮。趙鑫等[17]基于A*算法改進(jìn)得到ARA*算法,首先將約束條件松弛,搜索出一條次優(yōu)路徑,然后在加強(qiáng)約束條件的情況下改進(jìn)次優(yōu)解。
本文將移動(dòng)障礙物軌跡隨機(jī)環(huán)境下的AGV軌跡規(guī)劃問(wèn)題歸結(jié)為一個(gè)最優(yōu)控制問(wèn)題。利用直接配點(diǎn)法將最優(yōu)控制問(wèn)題離散成一個(gè)非線性規(guī)劃問(wèn)題,然后用常見(jiàn)的內(nèi)點(diǎn)法進(jìn)行尋優(yōu)。同時(shí),為了快速求解非線性規(guī)劃問(wèn)題,對(duì)傳統(tǒng)的A*算法做了改進(jìn),生成一條初始軌跡作為優(yōu)化過(guò)程的初始解。仿真表明,改進(jìn)A*算法能有效搜索出一條無(wú)碰的初始軌跡,利用直接配點(diǎn)法優(yōu)化后的軌跡在滿足約束的前提下與初始軌跡基本一致。
1 避障描述
一般AGV軌跡規(guī)劃問(wèn)題可以轉(zhuǎn)化為一個(gè)最優(yōu)控制問(wèn)題,即在滿足運(yùn)動(dòng)學(xué)約束、避碰約束和邊界條件的情況下,使得代價(jià)函數(shù)最小化。
1.1 AGV運(yùn)動(dòng)學(xué)
兩輪差速AGV運(yùn)動(dòng)平面圖如圖1所示,X-Y坐標(biāo)系為全局坐標(biāo)系,XR-YR坐標(biāo)系為AGV車(chē)身坐標(biāo)系,M處于驅(qū)動(dòng)軸的中間位置,C為小車(chē)的質(zhì)心所在,設(shè)方向以逆時(shí)針為正,AGV運(yùn)動(dòng)學(xué)描述為:
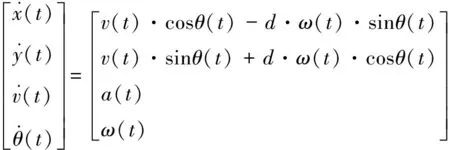
(1)
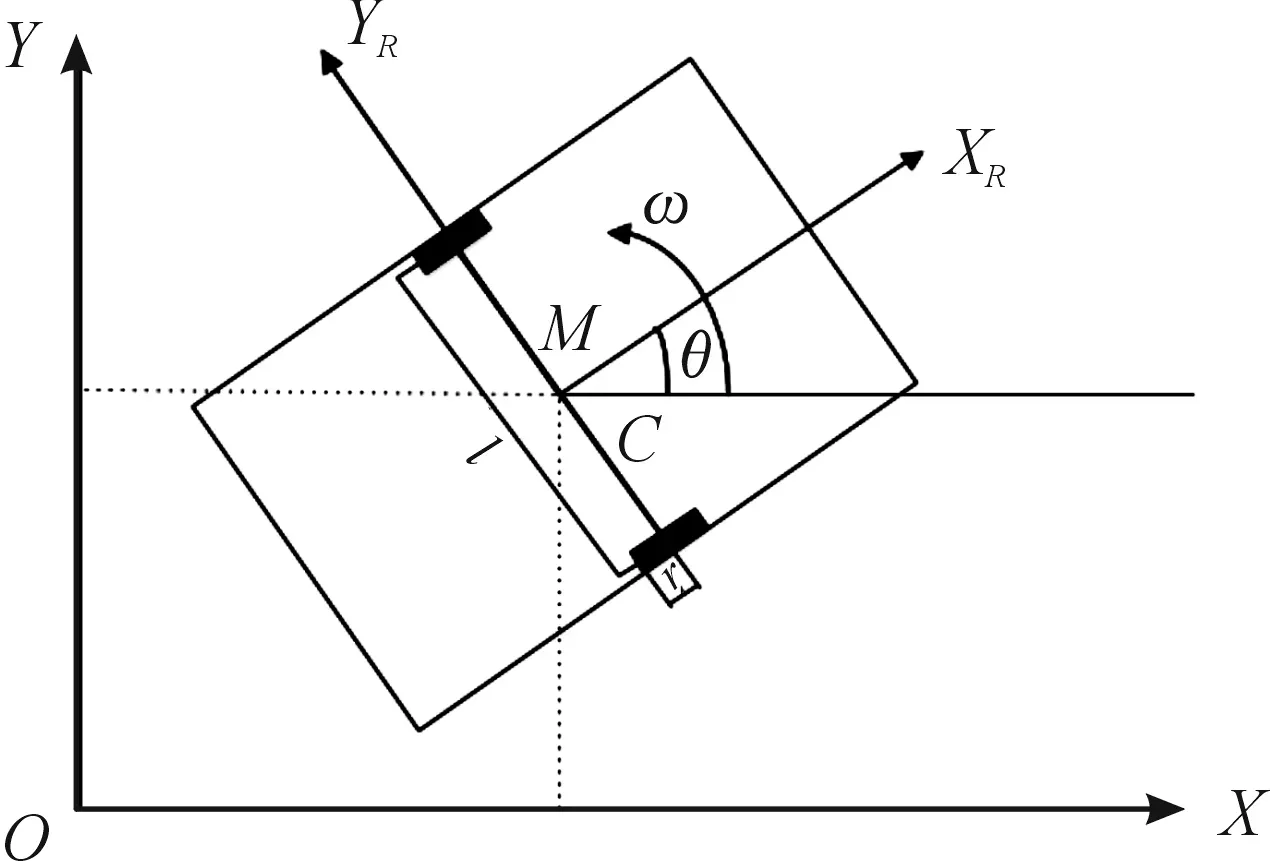
圖1 AGV運(yùn)動(dòng)平面圖
具體的參數(shù)含義見(jiàn)表1:
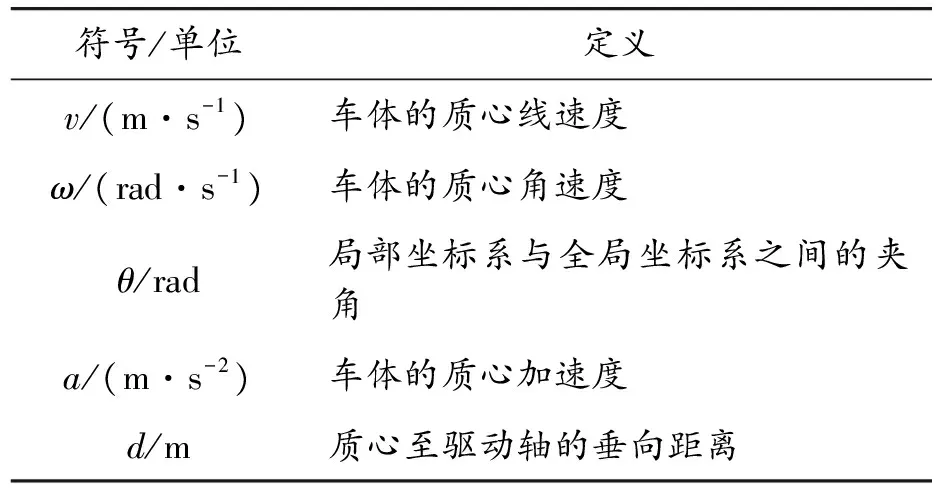
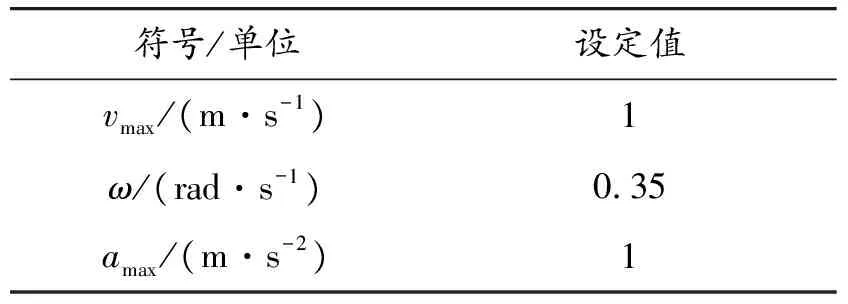
表1 參數(shù)與定義說(shuō)明
在[0,tf]時(shí)間內(nèi)AGV移動(dòng)過(guò)程中,存在幾個(gè)邊界限制其移動(dòng),運(yùn)動(dòng)約束如下:
(2)
其中,vmax、amax和ωmax分別代表相應(yīng)變量的最大值。
1.2 避碰約束
用包絡(luò)圓柱來(lái)覆蓋障礙物,其在AGV運(yùn)動(dòng)平面上的投影是圓形。假設(shè)在[0,tf]內(nèi)每個(gè)障礙物的位置都可以被正確地預(yù)測(cè),則第i個(gè)障礙物的圓心(xobs_i(t),yobs_i(t))和半徑Robs_i(t)在t∈[0,tf]內(nèi)任何時(shí)刻的位置已知。
在實(shí)際工作中,AGV的車(chē)身外形是矩形,但涉及矩形的避碰約束非常復(fù)雜,因此采用外接圓來(lái)覆蓋AGV的矩形車(chē)身,其避碰約束如式(3)所示:
(3)
1.3 邊界約束
假設(shè)AGV在t=0和t=tf的2個(gè)時(shí)刻分別處于起始位置和終端位置,則起始時(shí)刻約束設(shè)置如式(4)所示:
(4)
式中:x(0),y(0),θ(0),v(0),a(0)和ω(0)是初始時(shí)刻參數(shù)。
由于實(shí)際情況下的AGV并不一定能夠按期望到達(dá)理想位置,因此需要對(duì)終點(diǎn)約束進(jìn)行松弛,部分參數(shù)[v(tf),a(tf),ω(tf)]設(shè)置如式(5)所示:
[v(tf),a(tf),ω(tf)]=[vf,af,ωf]
(5)
式中:v(tf),a(tf),ω(tf)是終止時(shí)刻參數(shù)。
1.4 代價(jià)函數(shù)
在實(shí)際情況下,由于AGV的定位誤差等原因,AGV并不一定能?chē)?yán)格地到達(dá)期望的目標(biāo)位置,為了使AGV在終止時(shí)刻的位置[x(tf),y(tf),θ(tf)]盡可能地靠近期望的終端位置[xf,yf,θf(wàn)],則以x(tf)、y(tf)、θ(tf)分別與xf、yf、θf(wàn)的差的平方和作為代價(jià)函數(shù),即代價(jià)函數(shù)為:
(6)
1.5 最優(yōu)控制問(wèn)題建立
綜合上述約束條件以及代價(jià)函數(shù),AGV的避障軌跡優(yōu)化問(wèn)題可以歸結(jié)為以J為代價(jià)函數(shù),以車(chē)體質(zhì)心加速度α和車(chē)體質(zhì)心角速度ω為輸入,滿足運(yùn)動(dòng)約束、避碰約束、邊界約束的最優(yōu)控制問(wèn)題,如式(7)所示:
(7)
2 軌跡規(guī)劃
2.1 基于改進(jìn)A*算法的軌跡規(guī)劃
為獲取一個(gè)初始軌跡作為非線性規(guī)劃問(wèn)題的可行初始解,運(yùn)用一種改進(jìn)A*算法來(lái)生成運(yùn)動(dòng)軌跡。與傳統(tǒng)的A*算法相比,改進(jìn)A*算法在AGV二維運(yùn)動(dòng)平面的基礎(chǔ)上加入了時(shí)間維作為第三維度,形成軌跡空間。
改進(jìn)A*算法建立了軌跡空間,然后將連續(xù)x-y-t狀態(tài)空間用有限網(wǎng)格表示,定義抽象空間中的每個(gè)網(wǎng)格為節(jié)點(diǎn),指定起始節(jié)點(diǎn)A和目標(biāo)節(jié)點(diǎn)B,并標(biāo)記移動(dòng)障礙物占據(jù)的節(jié)點(diǎn)。
與傳統(tǒng)A*算法一樣,改進(jìn)A*算法也有2個(gè)函數(shù),即g(s)和f(s)。g(s)衡量從起始節(jié)點(diǎn)A到s的路徑成本,而f(s)=g(s)+h(s)用來(lái)估計(jì)經(jīng)由s從起始節(jié)點(diǎn)A到目標(biāo)節(jié)點(diǎn)B的總成本,選取歐氏距離作為h(s)的代價(jià)函數(shù),函數(shù)表示為:
(8)
式中:(xs,ys)代表當(dāng)前狀態(tài)節(jié)點(diǎn)的坐標(biāo),(xB,yB)代表目標(biāo)點(diǎn)節(jié)點(diǎn)坐標(biāo)。
改進(jìn)A*算法和傳統(tǒng)A*算法一樣,都有一個(gè)OPEN表,將起始節(jié)點(diǎn)A加入OPEN表中,并且將要展開(kāi)的節(jié)點(diǎn)以f(s)的遞增序列記錄。一旦有效節(jié)點(diǎn)s被擴(kuò)展,則將其從OPEN表中移除,并且將其所有未被擴(kuò)展的有效子節(jié)點(diǎn)添加到OPEN表中,同時(shí)把這些有效子節(jié)點(diǎn)的父節(jié)點(diǎn)設(shè)為s,路徑成本則為:
f(s′)=g(s)+c(s,s′)+h(s′)
(9)
式中:c(s,s′)為計(jì)算相鄰兩級(jí)節(jié)點(diǎn)s和s′之間的代價(jià)。如果s′已經(jīng)在OPEN表中,則表明s′已經(jīng)預(yù)先得到f(s)的值,這種情況下令
f*(s′)=g(s)+c(s,s′)+h(s′)
(10)
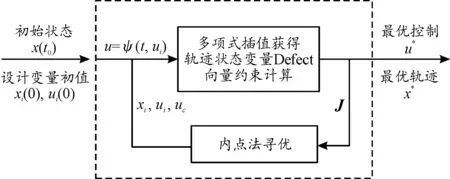
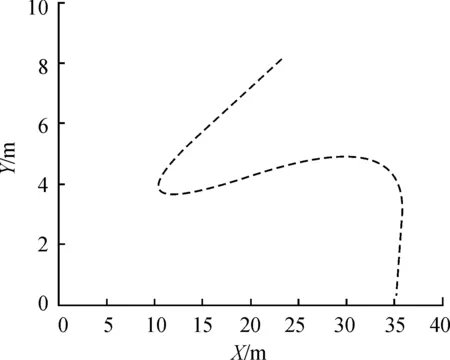
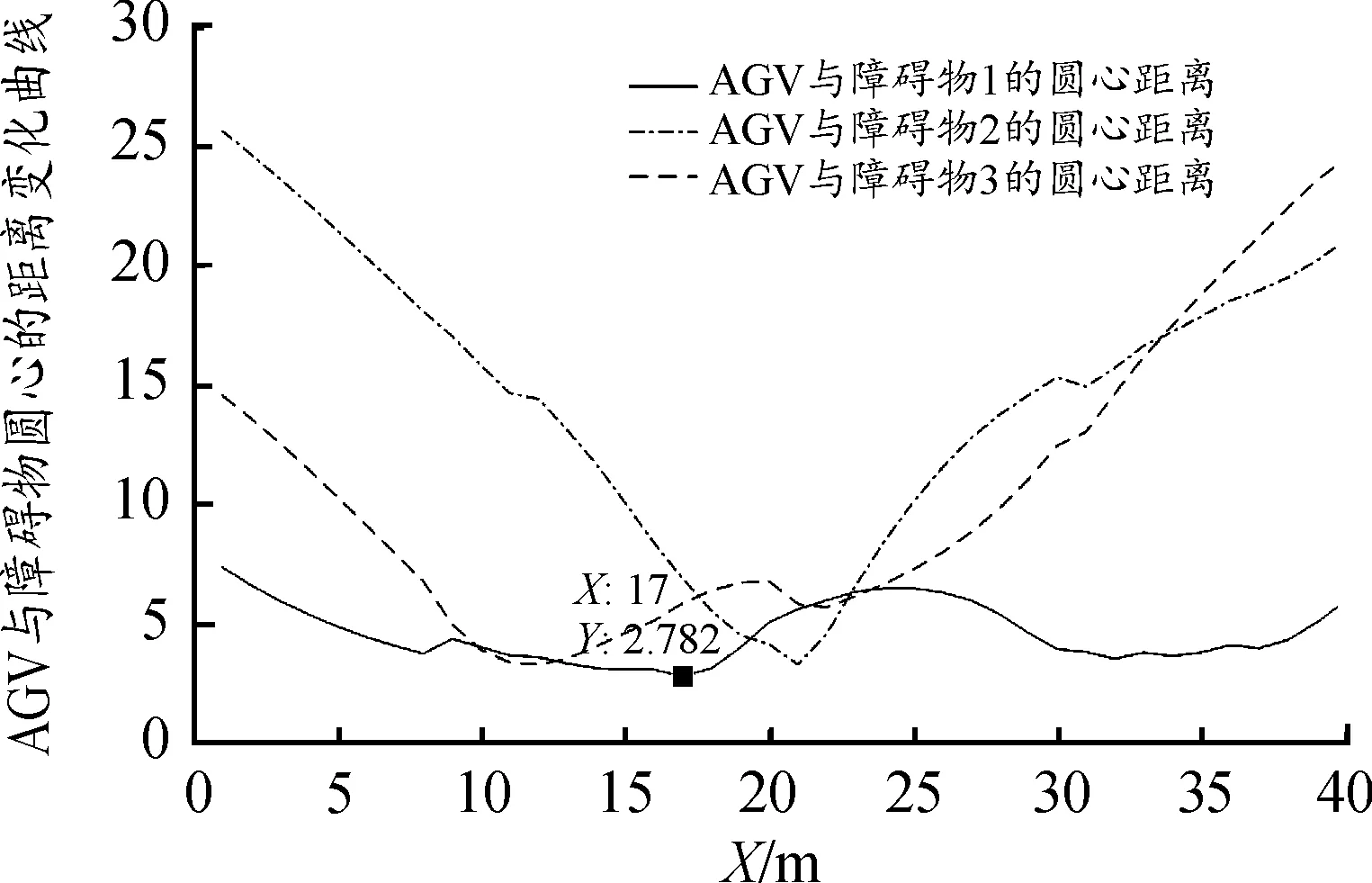
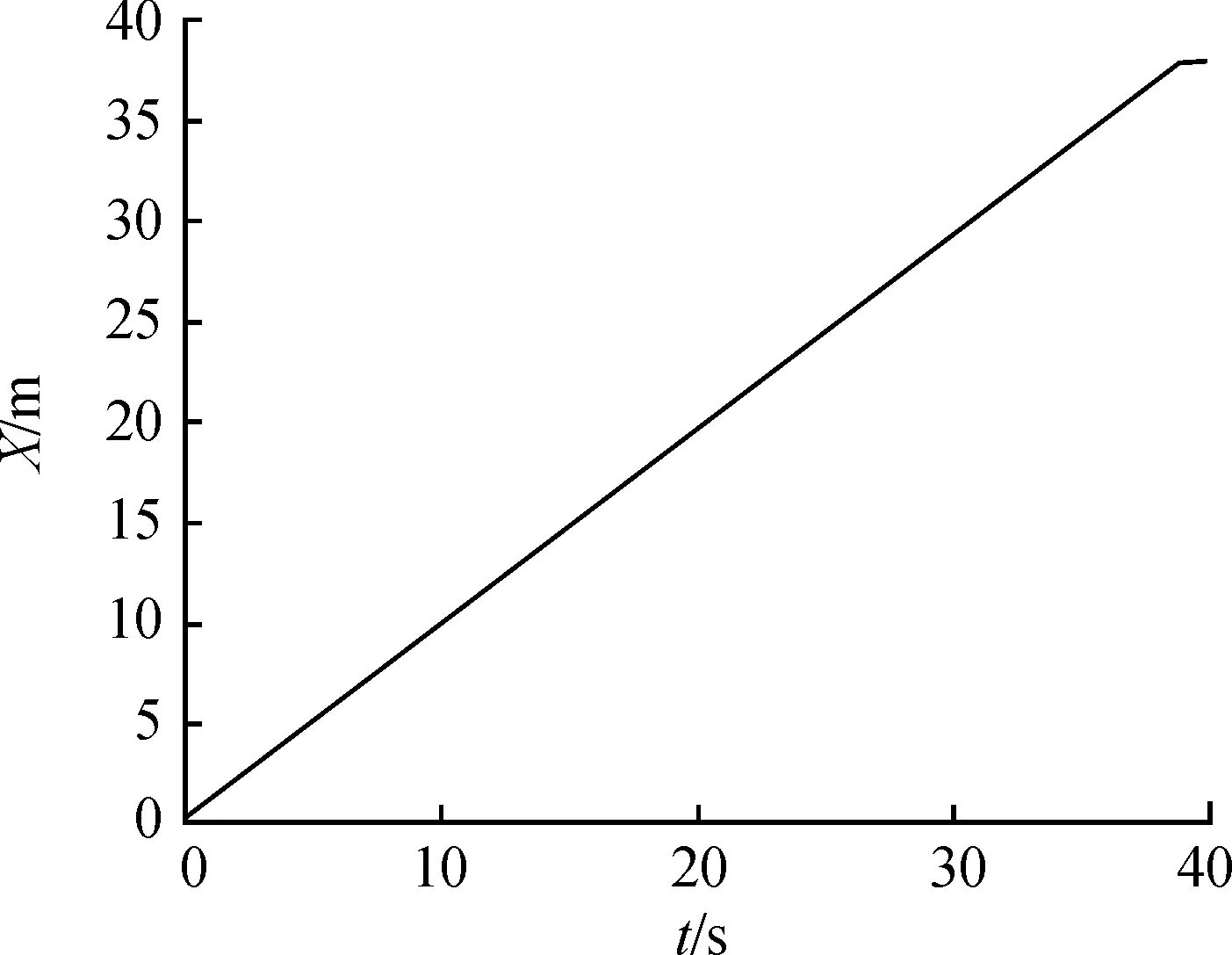
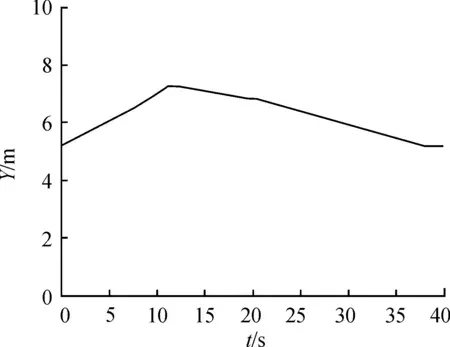
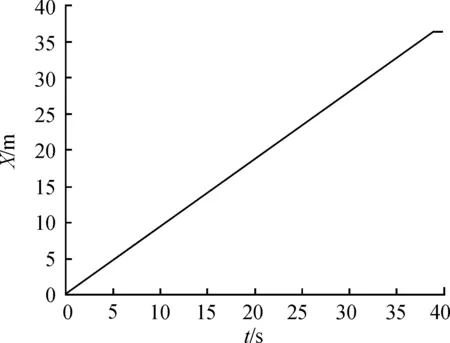
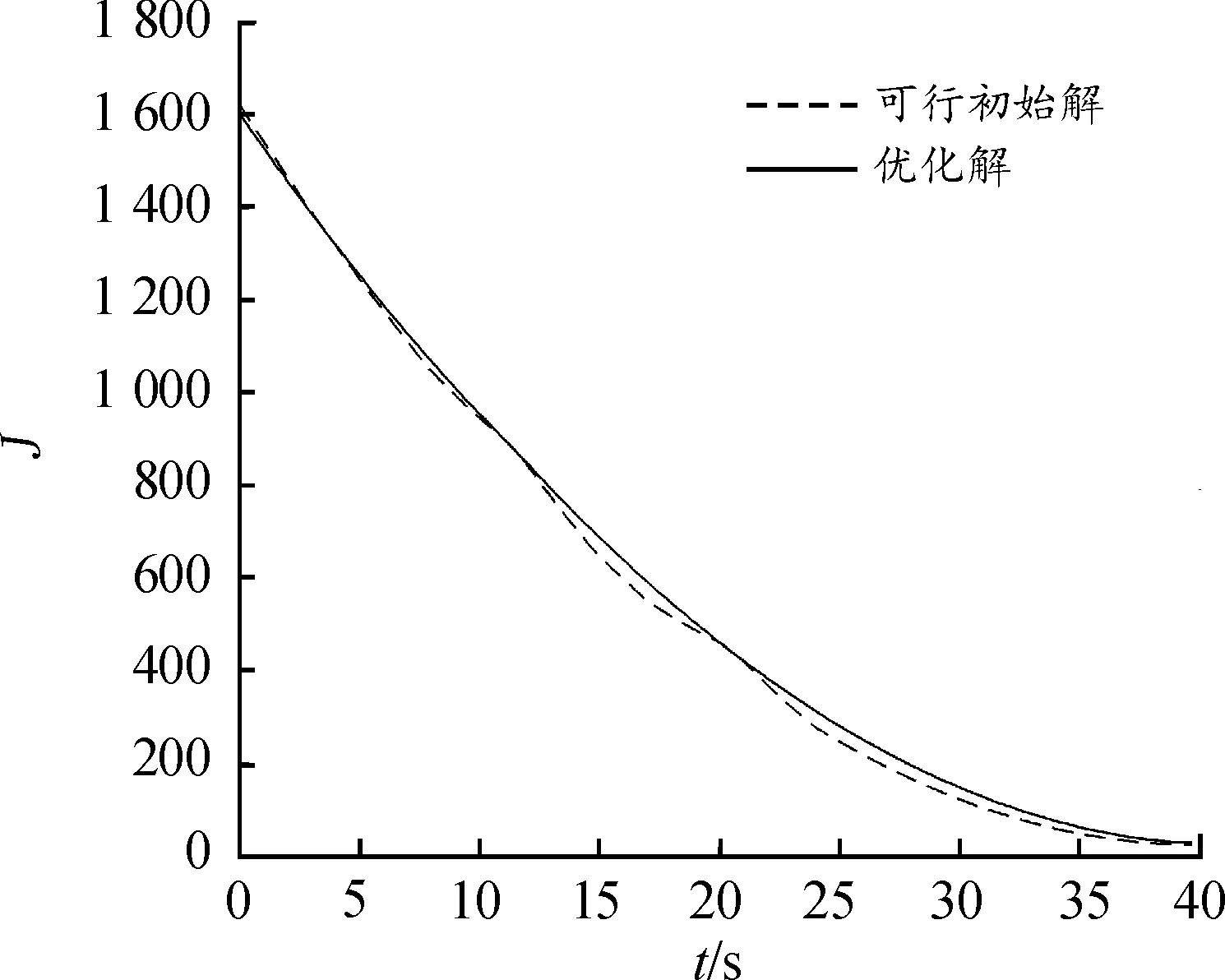
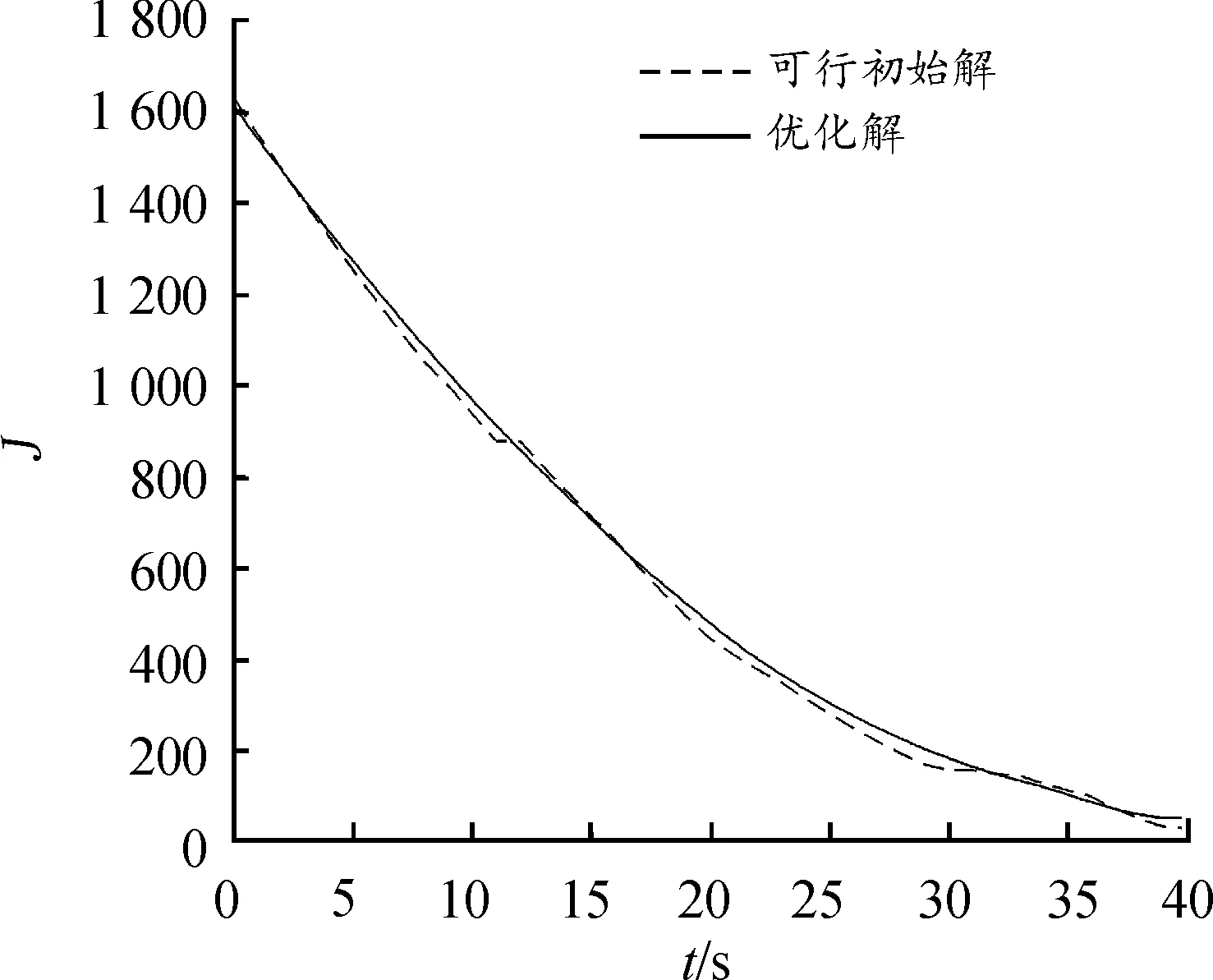
如果f*(s′) 圖2 改進(jìn)A*算法流程框圖 由改進(jìn)A*算法搜索出的軌跡存在尖點(diǎn),無(wú)法滿足AGV的運(yùn)動(dòng)學(xué)約束,因此需要進(jìn)行軌跡優(yōu)化。針對(duì)軌跡優(yōu)化問(wèn)題,采用數(shù)值方法求解前文所提出的最優(yōu)控制問(wèn)題,采用直接配點(diǎn)法將最優(yōu)控制問(wèn)題離散成一個(gè)多約束的非線性規(guī)劃(nonlinear programming,NLP)問(wèn)題。 直接配點(diǎn)法(direct collocation method,DCM)最早由Hargraves等[18]提出,可以同時(shí)離散控制量和狀態(tài)變量。首先,整個(gè)時(shí)間過(guò)程將被分割成N個(gè)小段,分割后的每一小段端點(diǎn)稱(chēng)為“節(jié)點(diǎn)”。對(duì)于節(jié)點(diǎn)之間狀態(tài)變量隨時(shí)間的變化關(guān)系,通常采用高斯-洛巴托多項(xiàng)式族來(lái)表示,由于在區(qū)間 [-1,1]上,Jacobian多項(xiàng)式是正交多項(xiàng)式族,因此配點(diǎn)依據(jù)具體的Jacobian多項(xiàng)式來(lái)選取。非線性規(guī)劃問(wèn)題的優(yōu)化設(shè)計(jì)變量主要包括節(jié)點(diǎn)處的狀態(tài)變量、節(jié)點(diǎn)和配點(diǎn)處的控制變量。最后,在滿足各類(lèi)約束的條件下對(duì)代價(jià)函數(shù)進(jìn)行尋優(yōu)。 針對(duì)軌跡優(yōu)化問(wèn)題,選用三階Simpson公式來(lái)擬合節(jié)點(diǎn)間狀態(tài)變量,具體描述如下: 1) 離散時(shí)間歷程,即: t0=t1 (11) 用(X1,X2,X3,…,XN)表示時(shí)間點(diǎn)對(duì)應(yīng)的狀態(tài)變量,(U1,U2,U3,…,UN)表示時(shí)間點(diǎn)對(duì)應(yīng)的控制變量。 2) 參數(shù)化狀態(tài)變量與控制量。 用三次插值多項(xiàng)式來(lái)近似表示子區(qū)間上的狀態(tài)變量,即: (12) 子區(qū)間[ti,ti+1]的邊界條件如式(13)(14)所示: X(0)=Xi,X(1)=Xi+1 (13) (14) 則: (15) 式(15)中的多項(xiàng)式系數(shù)、區(qū)間端點(diǎn)狀態(tài)變量和其導(dǎo)數(shù)的代數(shù)方程組可以依據(jù)式(14)中的邊界條件建立,求解式(15)可得: (16) 取子區(qū)間中點(diǎn)處(h=0.5)作為配點(diǎn),將式(16)代入式(12),可得: (17) 采用分段線性函數(shù)來(lái)近似控制變量,設(shè)uj為某個(gè)區(qū)間控制變量的第j個(gè)值,則: (18) 3) 計(jì)算配點(diǎn)的defect向量(該向量構(gòu)成了系統(tǒng)的非線性等式約束)。 為確保三次多項(xiàng)式能更好地?cái)M合狀態(tài)變量的變化,應(yīng)使式(19)中defect向量的期望值無(wú)限逼近于零。 (19) 式中:M為子區(qū)間配點(diǎn)處的狀態(tài)方程計(jì)算的狀態(tài)變量導(dǎo)數(shù),XM為多項(xiàng)式求得的狀態(tài)變量導(dǎo)數(shù)。 4) 求解非線性規(guī)劃問(wèn)題。 求解代價(jià)函數(shù)J最優(yōu)解的非線性規(guī)劃問(wèn)題需要滿足以下2個(gè)方面要求:① 滿足配點(diǎn)處約束,即defect=0;② 滿足原最優(yōu)控制問(wèn)題的約束條件。設(shè)計(jì)變量y如式(20)所示。 (20) 軌跡優(yōu)化問(wèn)題可轉(zhuǎn)化為式(21)中帶約束的非線性規(guī)劃問(wèn)題,即: (21) 式中:Q為代價(jià)函數(shù);pk(y)為非線性規(guī)劃問(wèn)題的不等式約束;qk(y)為等式約束。 綜上所述,最優(yōu)控制問(wèn)題可以以式(21)的形式來(lái)表述,其中Q表示代價(jià)函數(shù)J;pk(y)表示運(yùn)動(dòng)約束、避碰約束;qk(y)表示兩點(diǎn)邊界約束;y表示x(t),y(t),θ(t),v(t),a(t),ω(t)等變量。 離散后得到(2N+1)×4個(gè)狀態(tài)變量的離散值和(2N+1)×2個(gè)控制變量的離散值。離散化后的狀態(tài)變量和控制變量為: (22) 將控制變量的約束條件施加于節(jié)點(diǎn)及配點(diǎn)的控制變量離散值處,則可得: (23) 碰撞臨界約束轉(zhuǎn)化為節(jié)點(diǎn)處的狀態(tài)變量離散值的約束: (xAGVk-xobs_ik)2+(yAGVk-yobs_ik)2≥(RAGV+Robs_i)2 k=0,1,2,…,N-1,N (24) 將代價(jià)函數(shù)轉(zhuǎn)化為末端配置點(diǎn)處與期望位置的距離,即: minJ=(xN-xf)2+(yN-yf)2+(θN-θf(wàn))2 (25) 最后,采用在求解非線性規(guī)劃問(wèn)題過(guò)程中常見(jiàn)的內(nèi)點(diǎn)法來(lái)優(yōu)化求解。 基于直接配點(diǎn)法的優(yōu)化求解原理如圖3所示。 圖3 基于直接配點(diǎn)法的優(yōu)化求解原理示意圖 為了驗(yàn)證所提出的軌跡規(guī)劃的有效性,在Matlab平臺(tái)上建立仿真算例,基本參數(shù)設(shè)置如表2所示。 表2 AGV參數(shù) 在倉(cāng)儲(chǔ)環(huán)境中,存在的移動(dòng)障礙物一般為除自身以外的其他AGV,設(shè)置所有AGV在40 m×10 m的區(qū)域上運(yùn)行,運(yùn)行時(shí)間tf設(shè)為40.0 s,AGV的起始位置與目標(biāo)位置分別設(shè)為(0,5)和(40,5)。在[0,tf]期間,每個(gè)移動(dòng)障礙AGV的軌跡被設(shè)置為具有4個(gè)隨機(jī)節(jié)點(diǎn)的B樣條曲線,AGV的車(chē)身外接圓半徑設(shè)置為0.5 m。初始參數(shù)[x(0),y(0),θ(0),v(0),a(0),ω(0)]設(shè)置為[0,5,0,0,0,0]。 圖4為單障礙運(yùn)動(dòng)軌跡在XY平面內(nèi)的投影,圖5為多障礙運(yùn)動(dòng)軌跡在XY平面內(nèi)的投影,分別在單個(gè)和多個(gè)移動(dòng)障礙物環(huán)境下,利用改進(jìn)A*算法搜索生成的可行初始解,在障礙物軌跡投影平面內(nèi)的投影分別如圖6、7所示。 圖4 單障礙運(yùn)動(dòng)軌跡在XY平面內(nèi)的投影曲線 圖5 多障礙運(yùn)動(dòng)軌跡在XY平面內(nèi)的投影曲線 圖6 單障礙物軌跡投影平面內(nèi)的可行初始解投影曲線 圖7 多障礙物軌跡投影平面內(nèi)的可行初始解投影曲線 圖8為AGV在單障礙物環(huán)境下與障礙物圓心距離的變化曲線,圖9為AGV在多障礙物環(huán)境下與障礙物圓心距離的變化曲線。圖8中AGV與障礙物圓心的最小距離為3.19 m,圖9中AGV與障礙物圓心的最小距離為2.782 m,大于預(yù)設(shè)的安全距離1.2 m,表明改進(jìn)A*算法生成的初始軌跡是可行的,驗(yàn)證了改進(jìn)A*算法在動(dòng)態(tài)障礙物環(huán)境下可以有效地搜索出一條無(wú)碰軌跡。 圖8 AGV在單障礙物環(huán)境下與障礙物圓心距離的變化曲線 圖9 AGV在多障礙物環(huán)境下與障礙物圓心距離的變化曲線 圖10、11分別為單個(gè)障礙物環(huán)境下優(yōu)化解的X、Y坐標(biāo)的變化曲線,圖12、13分別為多個(gè)障礙物環(huán)境下優(yōu)化解的X、Y坐標(biāo)的變化曲線。如圖14、15所示,在單障礙物環(huán)境或者多障礙物環(huán)境下,優(yōu)化前后的軌跡大致上相同,但優(yōu)化后的軌跡更加平滑。 圖10 單障礙物環(huán)境下優(yōu)化解的X坐標(biāo)變化曲線 圖11 單障礙物環(huán)境下優(yōu)化解的Y坐標(biāo)變化曲線 由圖14、15可知,代價(jià)函數(shù)在每一時(shí)刻的梯度都是下降的且在結(jié)束時(shí)刻趨于平緩,因此優(yōu)化后的軌跡能在避開(kāi)障礙物的同時(shí)向目標(biāo)點(diǎn)逼近。 圖12 多障礙物環(huán)境下優(yōu)化解的X坐標(biāo)變化曲線 圖13 多障礙物環(huán)境下優(yōu)化解的Y坐標(biāo)變化曲線 圖14 代價(jià)函數(shù)在多障礙物環(huán)境下的變化曲線 圖15 代價(jià)函數(shù)在單障礙物環(huán)境下的變化曲線 將AGV在復(fù)雜動(dòng)態(tài)障礙物環(huán)境下軌跡規(guī)劃問(wèn)題轉(zhuǎn)化為最優(yōu)控制問(wèn)題,將改進(jìn)A*算法與直接配點(diǎn)法相結(jié)合進(jìn)行軌跡規(guī)劃。基于改進(jìn)A*算法進(jìn)行搜索生成初始軌跡,結(jié)果表明,在單障礙物和多障礙物環(huán)境下,AGV外接圓和障礙物外接圓的最小圓心距分別為3.19 m和2.78 m,滿足本文預(yù)設(shè)的安全距離要求,因此利用改進(jìn)A*算法能有效搜索出一條無(wú)碰的初始軌跡。然而,初始軌跡存在尖點(diǎn),無(wú)法滿足AGV的運(yùn)動(dòng)學(xué)約束,因此,本文采用了直接配點(diǎn)法進(jìn)行優(yōu)化。先對(duì)最優(yōu)控制問(wèn)題中的變量進(jìn)行離散,將最優(yōu)控制問(wèn)題轉(zhuǎn)化為帶約束的非線性規(guī)劃問(wèn)題,再利用非線性規(guī)劃問(wèn)題求解中常見(jiàn)的內(nèi)點(diǎn)法尋優(yōu)。優(yōu)化結(jié)果表明,優(yōu)化后的軌跡在滿足運(yùn)動(dòng)學(xué)約束的情況下與初始軌跡基本一致。另外,代價(jià)函數(shù)在每一時(shí)刻的梯度都是下降的且在結(jié)束時(shí)刻趨于平緩,因此優(yōu)化后的軌跡能在避開(kāi)障礙物的同時(shí)向目標(biāo)點(diǎn)逼近。本文軌跡規(guī)劃方法具有很強(qiáng)的應(yīng)用性,可適用于障礙物隨機(jī)移動(dòng)的情況,對(duì)將來(lái)AGV在動(dòng)態(tài)障礙物環(huán)境下的避障軌跡規(guī)劃研究有借鑒作用。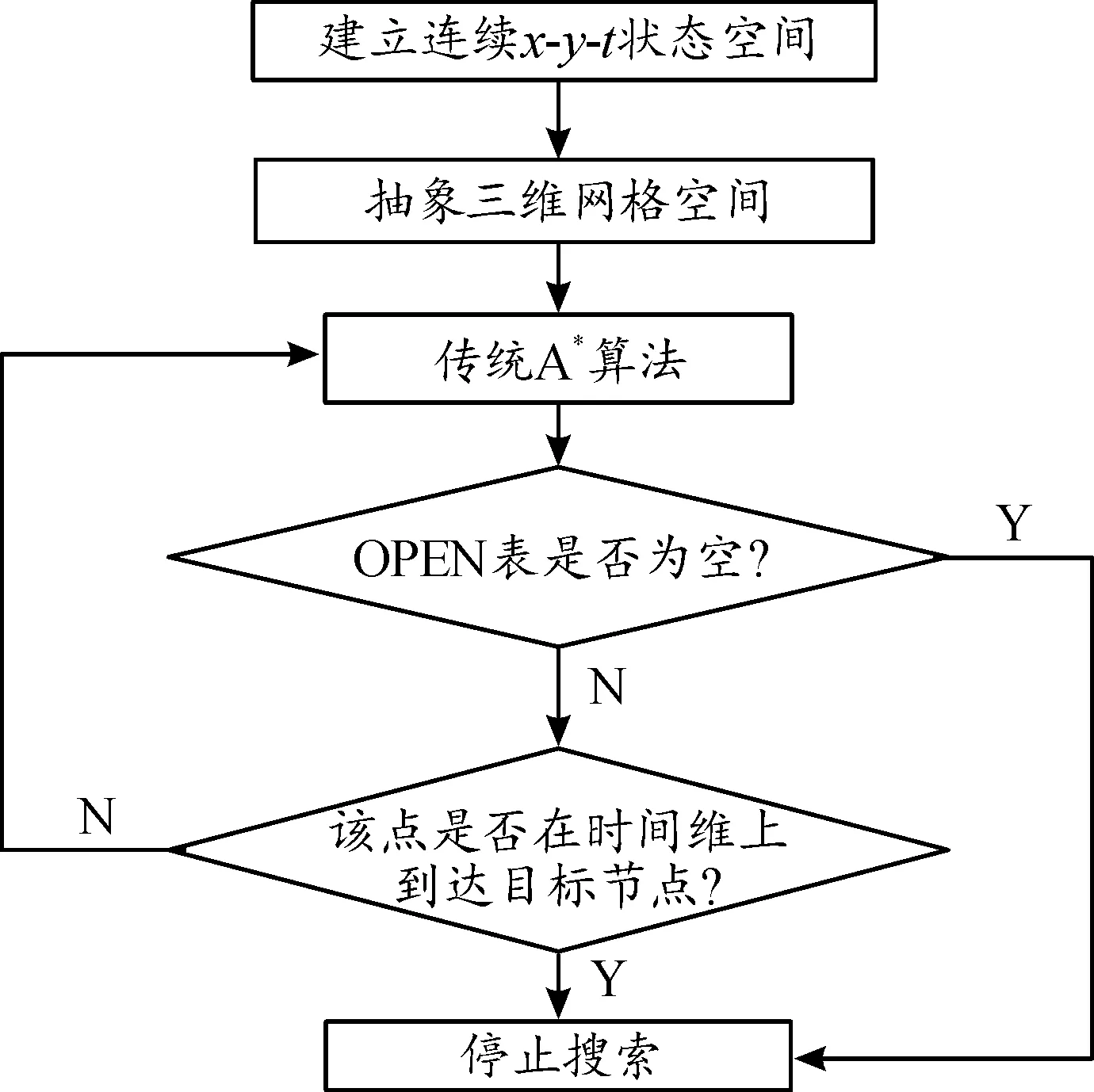
2.2 基于直接配點(diǎn)法的軌跡優(yōu)化

3 仿真結(jié)果
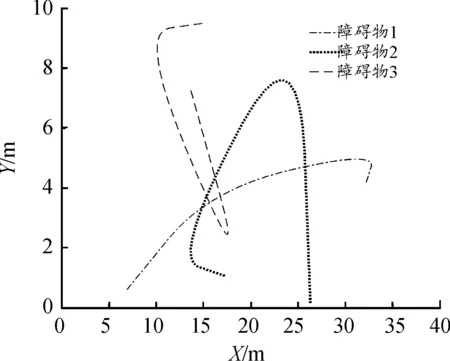
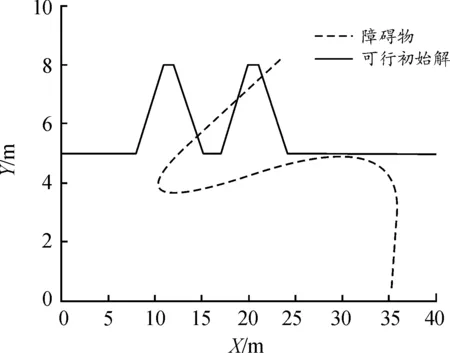
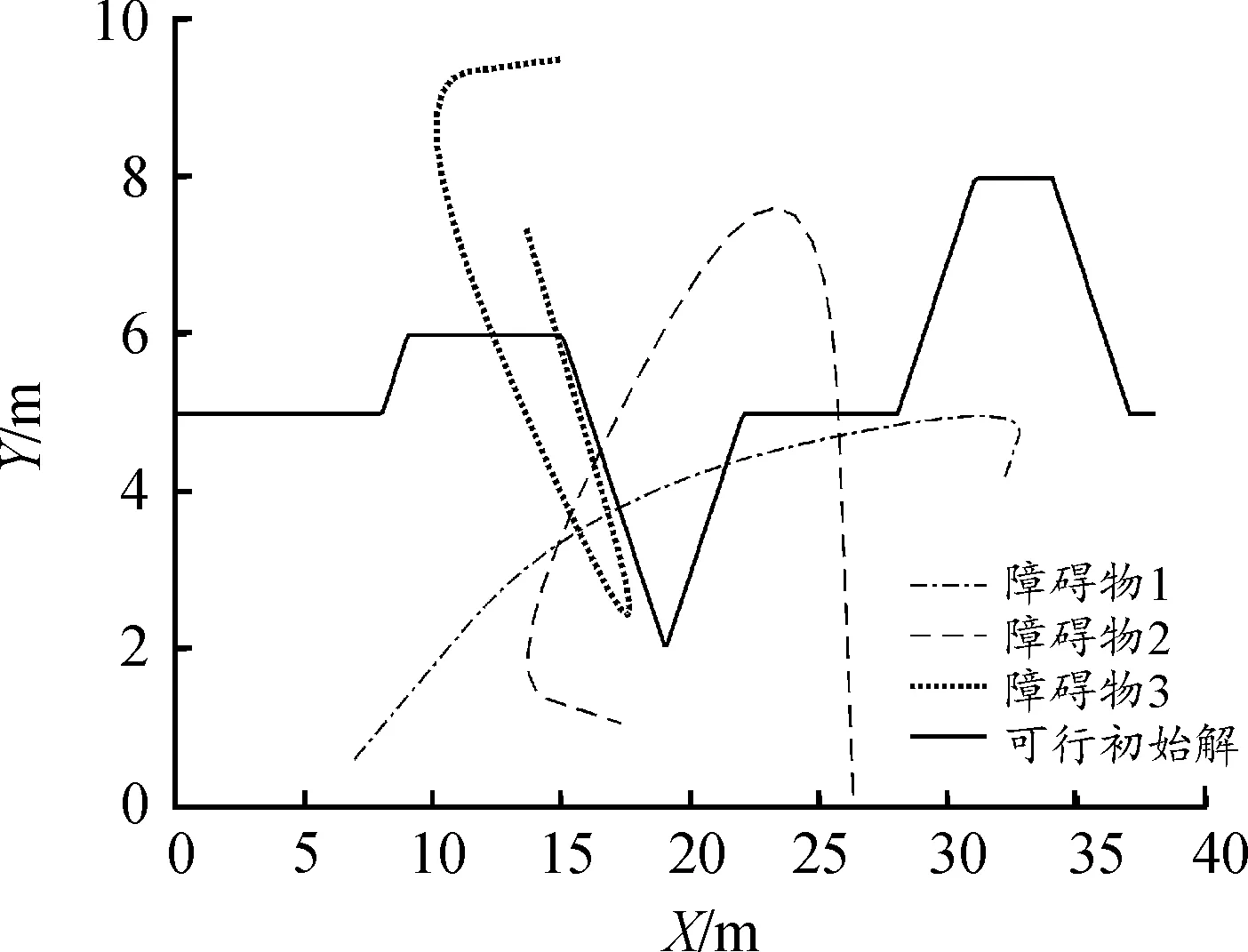
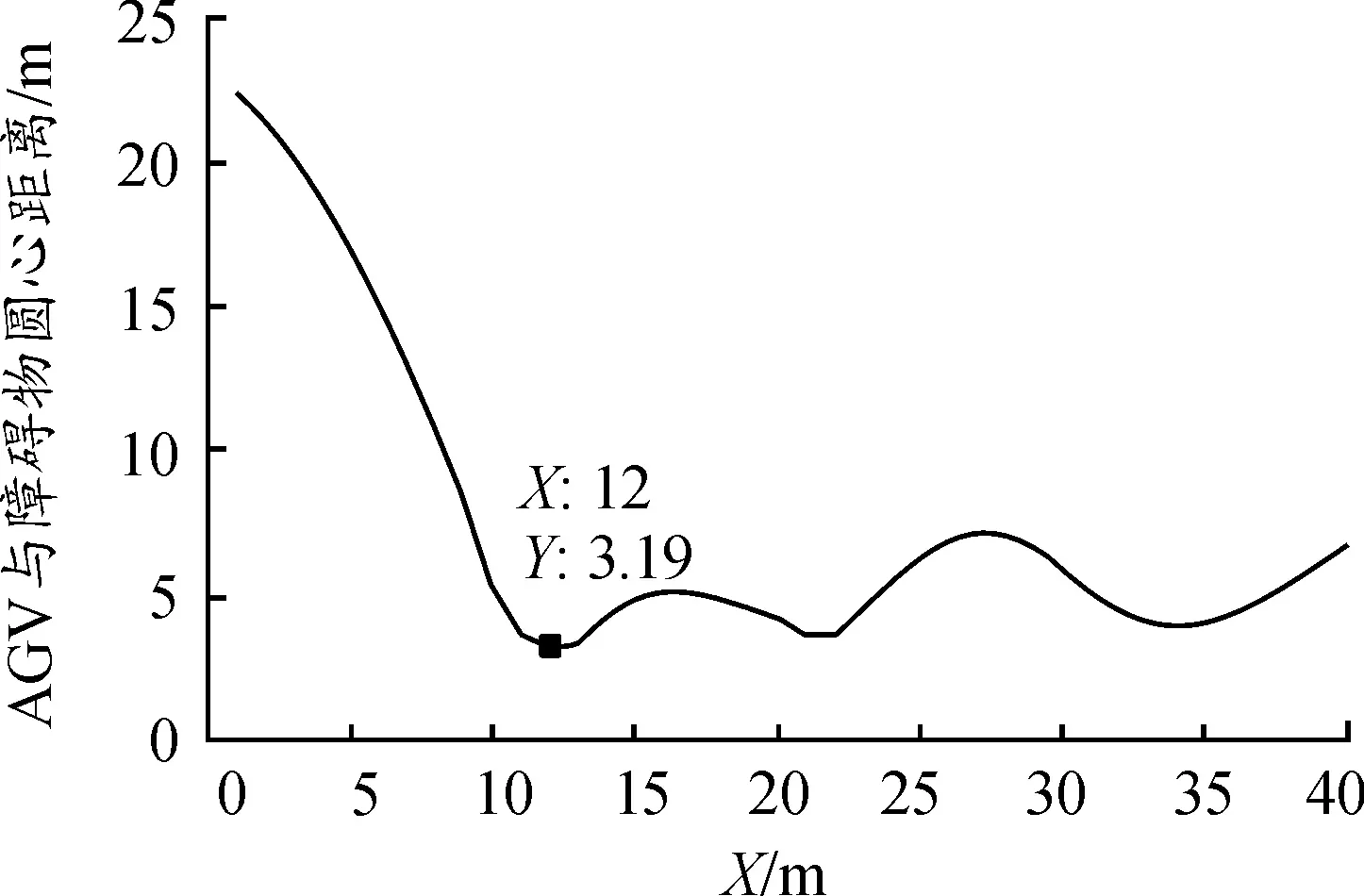

4 結(jié)論
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50公民與法治(2020年11期)2020-07-25 02:02:06領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16商周刊(2017年5期)2017-08-22 03:35:26中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16華東科技(2016年10期)2016-11-11 06:17:41