輪轂電機驅動電動汽車主動懸架最優控制分析
2022-04-22 01:39:38黃立君高志剛
科技風 2022年11期
黃立君 高志剛





摘 要:為提高輪轂電機驅動電動汽車行駛的平順性,在輪輞內安裝3組對稱彈簧—阻尼裝置,并建立輪轂電機懸架。在此基礎上,輪轂電機驅動電動汽車主動懸架最優控制,以二次型最優控制為主要手段,并獲得直線電機最優輸出力,并利用內環推力滯環控制、外環速度PID控制的雙閉環控制方式,獲得最優力,可實現輪轂電機驅動電動汽車主動懸架最優控制效果提升。
關鍵詞:輪轂電機驅動;電動汽車;主動懸架;最優控制
Abstract:In order to improve the ride comfort of electric vehicle driven by hub motor,three groups of symmetrical spring-damping devices were installed inside the rim,and hub motor suspension was established.On this basis,the wheel hub motor drive electric vehicle active suspension,the optimal control with quadratic optimal control as the main means,and obtain the optimal linear motor output power,thrust hysteresis control and by using the inner ring and outer ring speed PID control of double closed loop control method,to obtain the optimal power,which can realize wheel motor drive electric vehicle active suspension,the optimal control effect.
Keywords:Hub motor drive;The electric car;Active suspension;The optimal control
輪轂電機驅動電動汽車的主動懸架控制對電動汽車的運行狀態以及穩定性等會產生直接的影響,所以,在對輪轂電機驅動電動汽車主動懸架最優控制進行研究中,可對懸架架構、電流流動變化、轉矩波動狀態等方面進行綜合分析,在主動懸架最優控制與分析的基礎上,可對輪轂電機驅動電動汽車的運行狀態進行控制,從而保證電動汽車的平衡性與運行狀態。電動汽車在運行過程中,電機的運行會出現電流波動、轉矩波動的情況,這會增加電動汽車的振動,對車輛行駛的平順性、舒適性等會產生直接的影響[1]。結合輪轂電機振動問題,在對主動懸架進行控制的過程中,則可以通過二次最優控制理論,改進輪轂電機結構,優化動力減振機構,并對彈簧剛度、阻尼參數等進行控制,減小垂直振動對電動汽車行駛所產生的影響[2]。
1 電動汽車主動懸架的數學模型
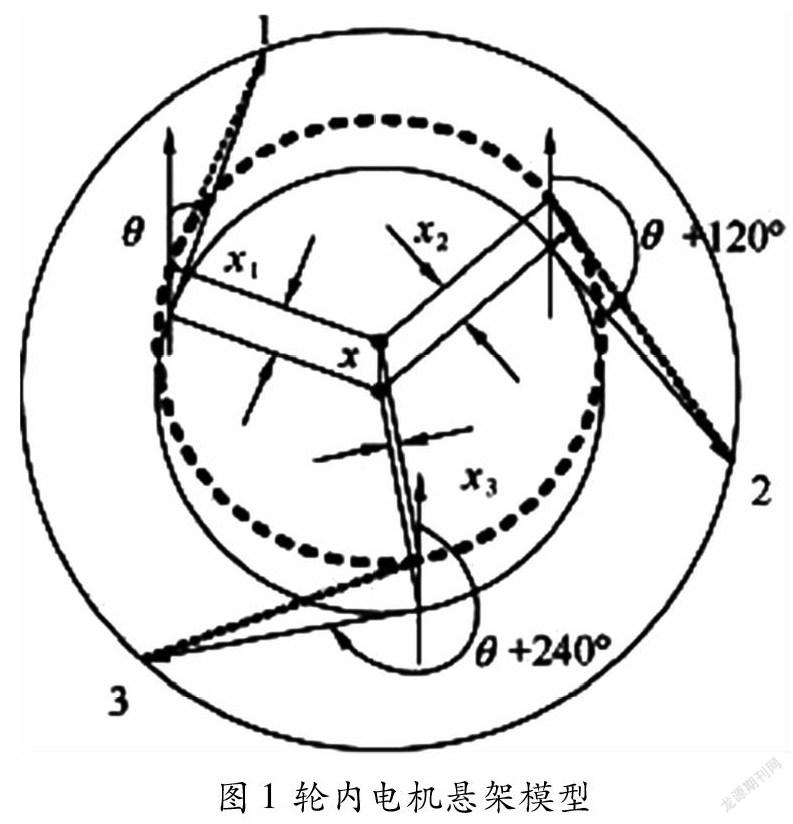
電動汽車主動懸架可利用三個120°的等分彈簧阻尼裝置進行構建,電機與電動汽車的車身相連接,車身與電動汽車輪胎之間可以利用直線電機作動器進行連接。其模型如圖1所示:
電動汽車主動懸架最優控制中,利用電極懸架進行平衡控制。彈簧剛度與阻尼系數的控制有助于對輪轂電機驅動的周期性變化進行控制[3]。在輪轂電機驅動電極懸架模型中,可利用彈簧阻尼的夾角,對彈簧阻尼的位移變化進行控制,如果出現了位移變化,則可以對懸架合力進行計算。在建立測量垂向振動模型的過程中,則需要對輪外懸架彈簧、車身懸架彈簧剛度之間的關系進行分析,其中,kt、kmb以及kb為車輪、輪外懸架彈簧、車身懸架阻尼系數,mt為車輪,mm為輪轂電機,mb為電動汽車的質量,xt為車輪,xm為輪轂電機,xb為車身垂向位移。X0為路面輸入狀態,Fm為輪轂電機的振動輸入,Fe為車身懸架作動器輸入。所建立的振動模型如圖2所示:
在對電機懸架阻尼系數cmt以及彈簧剛度kmt的關系進行分析中,其會隨著車輪的改變而變化,但是,其變動幅度比較小,所以可將其看為常量。在車輛垂向振動模型中,輸入的彈簧阻尼為三個,在實際運行的過程中,可對輪轂電機驅動過程進行轉換,并對電機輸出過程中的作用力進行計算[4]。輪轂電機驅動電動汽車主動懸架計算可忽略三種輸入之間的耦合關系,并利用PWM波對作用力進行調節與控制。通過電機變化頻率,對輪轂電機驅動的作用力進行調整,達到控制的目的。本次研究選擇三相8極48槽永磁同步電機進行控制,根據輪轂電機自身振動所產生的電磁力波,對振動過程及規律進行控制[5]。
2 直線電機主動懸架的多閉環控制策略
輪轂電機驅動電動汽車主動懸架的多閉環控制是利用直線電機的動子與定子,對永磁同步電機進行操作控制,為提高控制的穩定性,可對鐵心飽和狀態以及渦流磁滯的損耗進行計算,建立直交軸的電壓方程(ud,uq)以及磁鏈方程,其表達式如下:
在對主動懸架進行控制中,采用二次型最優控制策略進行控制,并建立評價函數。因此,建立電動汽車主動懸架的多閉環控制框架,其框架如圖3所示:
本次建立的多閉環控制框架,重點通過1/4車輛振動模型對作動器、LQR空氣的運行狀態進行控制。在搭建1/4車輛振動模型,可對LQR控制器的最優控制進行優化,并對負載阻力FLoad的變化進行計算。直線電機作動器可以利用FL跟蹤電磁推力Fe的變化,對輪轂電機驅動電動汽車主動懸架的電磁變化、動力傳輸過程等進行閉環控制,滿足輪轂電機驅動電動汽車主動懸架最優控制的需求。直線電機的兩端可以與車身、輪轂等連接在一起,并對電動汽車的懸架減震器參數進行調整,從而滿足電磁滯環的控制需求。輪轂電機的輸出速度與輪轂電機驅動電動汽車主動懸架的最優控制參數有直接關系,所以,在對輸出的作用力與懸架控制力之間的關系進行分析中,可利用滯環控制器,對動態的數字信號進行傳輸,將其傳輸到輪轂電機驅動電動汽車主動懸架的控制模型中,形成PWM波,生成有效的信息數據,并對逆變器的通斷變化進行控制,提高多閉環控制模型在輪轂電機驅動電動汽車主動懸架控制中的應用效果[6]。
3 實例仿真分析
在對多閉環控制框架進行分析中,方針所選擇的模型參數如表1所示,永磁同步直線電機作用器的仿真參數如表2所示。
在進行仿真分析的過程中,可通過matlab中lqr函數進行計算,加權矩陣q=diag(2000,5000,2500,250),r的數值為0.01因此,K的最佳表達公式如下:
K=[-12217,7537,4227,-273,765,756]
在對仿真系統的動態模擬進行分析中,對矩陣特征值以及特征向量進行計算,從而反映系統振動模態。在對系統模態參數進行分析中,其參數狀態如下:
輪轂電機驅動電動汽車主動懸架最優控制的數據分析是通過模態頻率的計算與分析,對控制模型的特征向量進行計算,在這一過程中,整個系統為垂向移動,而且可以通過振動狀態控制,實現輪轂電機驅動電動汽車主動懸架的控制效果提升。
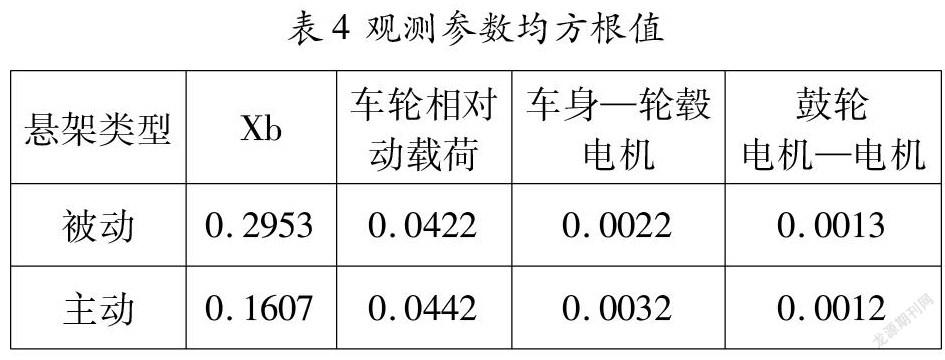
為檢驗輪轂電機驅動電動汽車主動懸架最優控制模型的實際應用,以B級路面為研究對象,并對主動懸架的變化過程以及車速變化狀態等方面進行分析,將電動汽車的車速控制在30km/h的狀態,并對輪轂電機、車身、電機位移狀態之間的關系進行分析,從而獲得主動懸架最優控制點。其均方根差值如下:
從主動懸架與被動懸架對比的角度進行分析,主動懸架下,車身垂向加速度均方根的數值減小了45%以上。而且,其最大數值出現大幅度降低的情況,可以提高電動汽車的平順性。車輪相對動載荷均方根增加了4%以上,可以認為其基本保持不變。瞬時狀態下,輪轂電機—車輪的懸架振動差值基本不變,所以,主動懸架在大幅度提高平順性的同時,對電動汽車的操縱性并沒有產生明顯的影響。車身—車輪、輪轂電機—車輪相對位移的均方根值出現了增大的變化,其分別增加了37%、16%以上。車身—車輪相對位移的最大數值為8mm,輪轂電機—車輪的相對位移最小數值為4mm,可以滿足電動汽車車身與電機懸架的行程要求。因此,兩個數值相比較,主動懸架可保持其自身的優越性能[7]。
從車身垂向加速度與車輪的相對動載荷變化角度進行分析,在Matlab下,FFT函數處理所獲得幅頻曲線變化差異比較明顯[8]。通過頻域仿真分析可以發現,在LQR控制的永磁同步電機的主動懸架下,其可以將幅值控制在0~5Hz頻段,在1~2Hz頻段內降低的比較明顯,與模態分析的結果基本保持一致。在5~15Hz頻段的狀態下,其會產生一定的削弱作用,可進一步提高電動汽車的平順性。B級路面,車速的不同,其所產生的結果基本相同,這說明B級路面下,30km/h時的作動器輸出推力與LQR控制力的變化基本保持一致,說明電動汽車的永磁同步直線電機輸出推力可以達到保持基本一致的狀態。
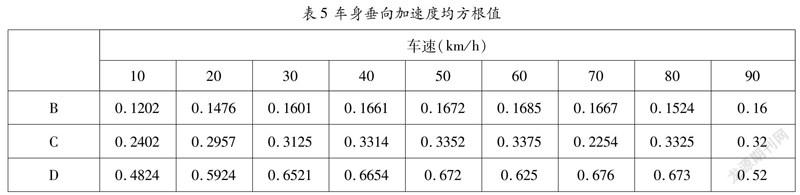
從不同路面、不同車速的角度,對電動汽車主動懸架性能進行分析。本次研究是在B、C、D級路面下,將車速控制在10~90km/h,并對車身垂向加速度均方根值進行計算,其結果如下:
在對上述結果進行分析中,隨著路面的使用性能逐漸惡化,垂向加速度的均方根的數值會逐漸增大,電動汽車的平順性逐漸降低。隨著車速逐漸增大到60km/h的狀態下,均方根也會隨之增大,隨車速增加會逐漸減小。直線電機在實際應用的過程中,其整個頻率變化對電動汽車的平順性會產生直接的影響。因此,在對振動幅值的變化進行分析的過程中,則需要對振動幅值變化進行控制,這對電動汽車的平順性會產生直接的影響。因此,在對頻率變化進行分析的過程中,其頻率變化分別為1~2Hz和7~9Hz。在此前提下,1~2Hz頻率內,所產生振動間隔時間的差值比較大。在7~9Hz頻段內,則產生的振幅最大狀態下,所對應的頻率數值為8Hz,在這一狀態下,會出現共振的情況。從系統參數的角度進行分析,則需要從輪胎、輪轂電機等方面進行綜合分析,本次研究的輪胎規格為215/50R18,在8Hz頻率下,可以將電動汽車的速度控制在60km/h左右,從而保證電動汽車行駛過程中的平順性。本次輪轂電機驅動電動汽車主動懸架最優控制,在路面變化的狀態下,電動汽車的平穩性并不會受到太大的影響。隨著車速的變化,車身、車輪、輪轂電機的位移變化在可控范圍。從路面不平的角度進行分析,則輪轂電機驅動電動汽車主動懸架的控制過程,其位移為1.2cm,基本可以達到對電動汽車進行減振的目的。
結論
以直線電機作為動器的輪轂電機電動汽車主動懸架構型,并建立主動懸架的動力模型,利用主閉環LQR控制器調節直線電機的最佳電磁推力,從而建立多閉環控制模式。在實際研究與分析中,輪轂電機驅動電動汽車主動懸架最優控制的優化,可通過輸出跟蹤控制,對多閉環控制模式進行優化,從而實現電動汽車的減振性能提升。
參考文獻:
[1]代萍,溫欣,李以農.饋能懸架的多模式智能控制策略[J/OL].重慶大學學報,2021:1-12.
[2]李杰,賈長旺,成林海,趙旗.輪轂電機電動汽車主動懸架約束狀態反饋H_(∞)控制[J/OL].吉林大學學報(工學版),2021:1-10.
[3]張云,孫劭澤,金賢建,李韶華,楊俊朋,王佳棟.輪轂式電機驅動電動汽車主動懸架滑模控制研究[J].動力學與控制學報,2021,19(03):89-94.
[4]李仲興,宋鑫炎,劉晨來,薛紅濤.輪轂電機驅動汽車半主動懸架自適應最優控制[J].重慶理工大學學報(自然科學),2021,35(08):25-32+65.
[5]陳齊平,魏佳成,羅玉峰,鐘陳志鵬,王亮.輪邊驅動電動汽車主動懸架LQG控制仿真研究[J].現代制造工程,2020(03):7-13+92.
[6]李佩琳,方明霞.輪轂驅動電動汽車主動懸架的時滯控制[J].噪聲與振動控制,2020,40(04):137-141+182.
[7]范珍珍.輪轂電機驅動電動汽車主動懸架最優控制研究[J].汽車實用技術,2020,45(17):29-32.
[8]曹青松,許力,易星.輪轂電機驅動的電動汽車主動懸架構型與控制[J].機械設計,2020,37(10):85-92.
基金項目:江西省科技廳科技計劃項目(20181BBE 58007);江西省教育廳科技項目(GJJ171038);江西科技學院自然科學技術項目(ZR1713,ZR1809);江西科技學院汽車服務工程及產業升級協同創新中心自設開放基金項目(19XTKFYB02)
作者簡介:黃立君(1986— ),女,漢族,山東聊城人,碩士,講師,研究方向:車輛系統動力學與控制。