基于ZYNQ的雷達信號偵察的高效實現
2022-05-06 04:46:18趙忠凱
艦船電子對抗 2022年2期
陳 光,趙忠凱
(哈爾濱工程大學,黑龍江 哈爾濱 150001)
0 引 言
近些年來,隨著技術的發展,應用于軍事上的雷達信號偵察平臺也在不斷更新。無人機技術的快速發展使其在軍事上得到了應用,將偵察平臺部署到無人機上對偵察平臺的體積與功耗都提出了挑戰。小型化、低功耗成為了無人機偵察平臺的發展方向和研究難點。
在電子對抗中,偵察功能的實現包括脈沖描述字(PDW)測量及脈沖信號分選,當非合作方有多部雷達同時工作時,信號分選就顯得尤為重要,通過分選可以得出每部雷達的位置信息及脈沖信號的重頻、脈寬、頻率等參數,是獲取敵方情報的重要手段,為下一步采取行動提供參考。目前,分選算法在工程上多是基于數字信號處理器(DSP)實現的,實現方案未考慮脈沖描述字的測量,不具備完整性。
因此本文根據偵察功能在硬件平臺上實現的特點,選擇Xilinx公司的新一代片上系統(SoC)芯片ZYNQ實現。該芯片的可編程邏輯(PL)部分為現場可編程門陣列(FPGA),處理系統(PS)部分為ARM微處理單元,芯片內部集成了多種通信接口,便于兩部分之間進行數據傳輸。相較于早期偵察平臺的FPGA+DSP架構,ZYNQ芯片的FPGA+ARM架構的解決方案,既避免了板間的數據交互,又降低了系統功耗,較為符合無人化平臺的需求。
1 偵察功能
本文設計在PL部分實現脈沖描述字的測量,PS部分使用預分選與主分選完成信號分選功能,且兩部分之間以DDR3存儲器作為數據存儲媒介,通過高級可擴展接口(AXI)通信。偵察功能實現的系統結構如圖1所示。

圖1 偵察功能實現的系統結構
1.1 脈沖描述字測量
通過測量脈沖描述字,可獲取表征脈沖信號特點的參數,作為后續分選的依據。通過Cordic算法可測出脈沖信號的瞬時相位與幅度,經過一階差分計算可得到信號的瞬時頻率,實現瞬時測頻。在1個脈沖內,將脈沖瞬時頻率的最大值與最小值做差即可求出信號的帶寬,將同一脈沖的起始點的到達時間與脈沖結束點的到達時間做差可求得脈寬。將第個脈沖的到達時間與第+1個脈沖的到達時間做差可求得脈沖重復間隔。脈沖的到達角(DOA)信息由偵察模塊采用多基線相位干涉儀方法測得。綜合上述參數,即組成了脈沖信號的PDW,計算原理如圖2所示。
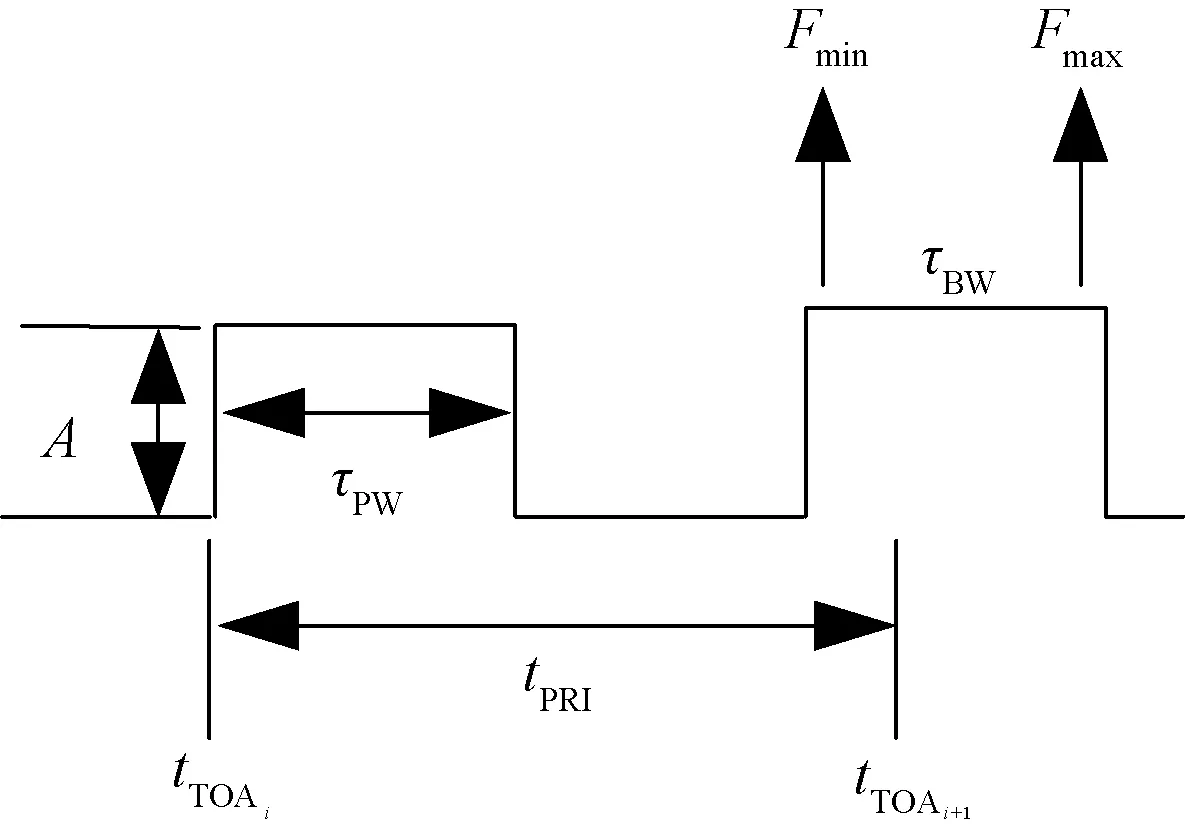
圖2 脈沖描述字測量原理
1.2 信號分選
脈沖信號的分選包括預分選與主分選,預分選主要是將高密度的脈沖流進行稀釋,減輕主分選的壓力,為主分選做準備。主分選將對預分選輸出的每個子類進行基于的細分,并最終輸出每部雷達的參數信息,分選流程如圖3所示。
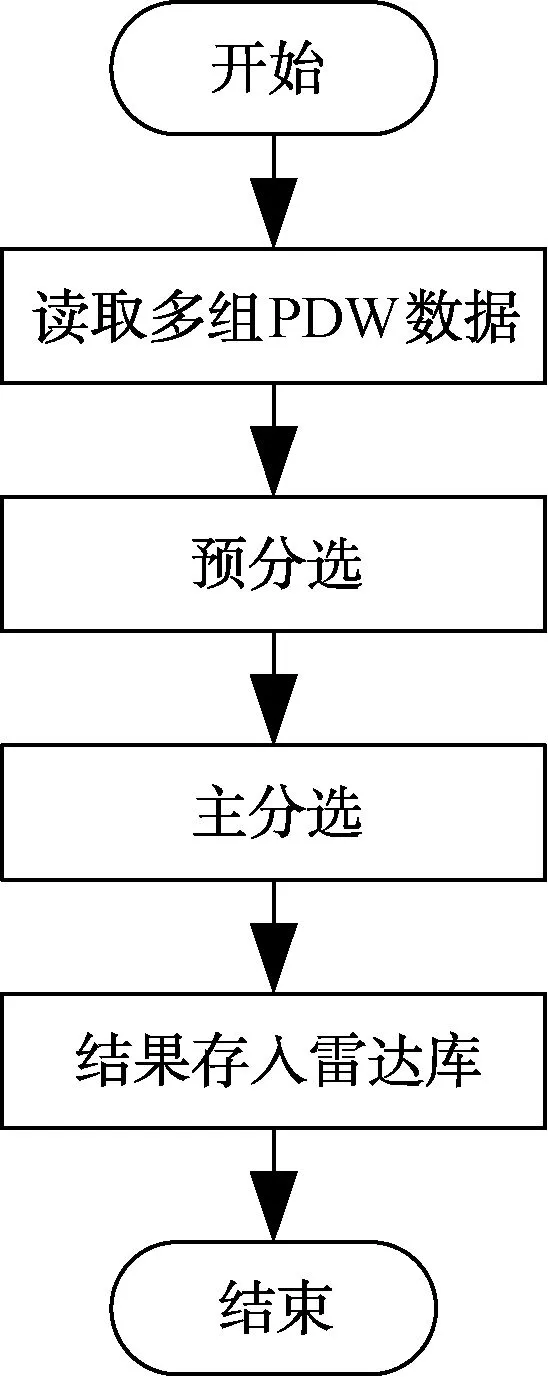
圖3 信號分選整體流程圖
1.2.1 預分選
聚類算法作為目前工程上常用的分類算法之一,具有計算量小、原理簡單、實現便捷、分類準確率高的特點。根據PDW的參數特點,預分選采用層次聚類算法。
層次聚類是根據待分類數據不同維度的參數,一層一層地進行聚類,這里使用分裂型層次聚類法,由上向下將大的類別分割。初始時,將所有的樣本歸為一個類簇,然后依據樣本閾值或聚類數目要求,進行逐層的分裂,直到滿足條件。在進行預分選時,首先以脈沖數據的DOA為依據進行第1層聚類,將多組PDW進行聚類;然后在第1層聚類結果的基礎上,以為依據進行第2層聚類;依此類推,第3層以為依據,逐層細分,最終輸出每個PDW子類,后續再對每個子類進行主分選。
1.2.2 主分選
主分選包括序列差值直方圖(SDIF)算法、參差校驗、捷變頻校驗與抖動分析,在預分選輸出的聚類結果中,依次對每一個PDW子類中的脈沖進行處理,采用SDIF算法進行信號分選。SDIF算法主要由PRI測定和序列搜索2個步驟組成。在進行SDIF算法后,還需要進行參差校驗、捷變頻校驗與抖動分析。通過參差校驗可以分選出含有子PRI的參差雷達,而通過捷變頻校驗則可以識別出載頻捷變的雷達。抖動分析可以分析出PRI在一定范圍內變化的抖動雷達信號,并給出抖動范圍。主分選過程中的各個步驟如圖4所示。
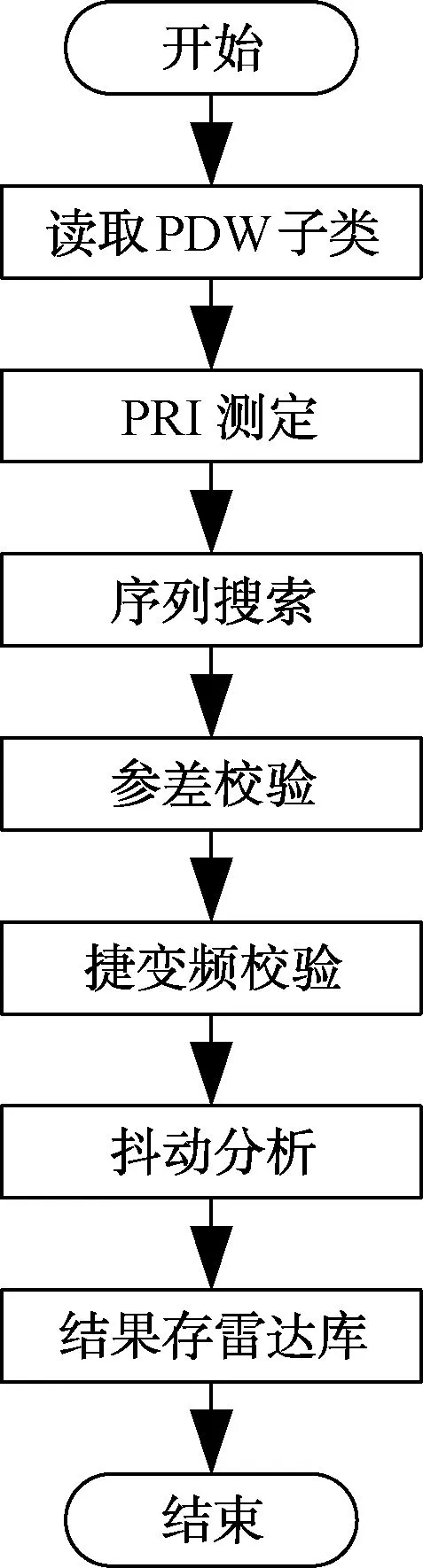
圖4 主分選流程圖
在進行PRI測定時,檢測門限關系到PRI值的可靠性以及準確性。在有限采樣時間內,脈沖間隔與脈沖數量成反比。故門限與總脈沖數成正比,與脈沖間隔成反比,即:
(1)
式中:為小于1的常數。
假設采樣時間內有多部雷達脈沖信號,相鄰脈沖間隔將服從Poisson分布。將采樣時間分為個脈沖子間隔,在時間間隔=-內有個隨機Poisson出現的概率為:

(2)
()=(-)e-
(3)
式中:為總的脈沖數目;為差的級數;為小于1的常數;為采樣時間;一般通過實驗來確定。
1.3 分選算法驗證與性能分析
為驗證上述算法的正確性與穩定性,對其進行仿真測試。設置產生8部不同類型的雷達脈沖信號數據,雷達類型包括常規雷達、參差雷達、抖動雷達和捷變頻雷達,其中參差雷達括號中數據代表子PRI的值,抖動雷達括號中數據代表PRI的抖動率,捷變頻雷達括號中代表跳頻間隔與跳頻點數,每部參數如表1所示。
仿真條件為模擬實際環境中5%的脈沖信號丟失率和8%的噪聲干擾,其中到達時間精度為1 μs,脈寬的精度為1 μs,載頻的精度為1 MHz,到達角精度為1°。
8部混合雷達分選的仿真結果如表2所示,首先,輸出的雷達部數與類型都與表1吻合;其次,在精度允許范圍內,每部雷達對應的參數都正確,證明上述分選算法能夠正確分選出8部雷達。
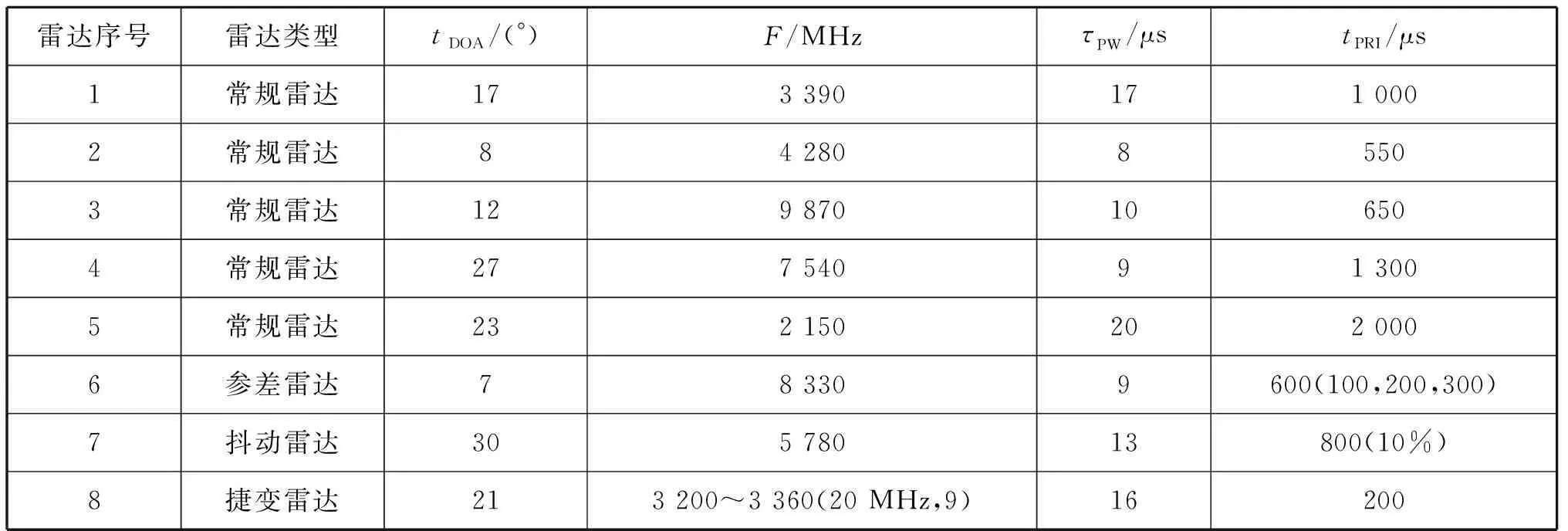
表1 8部混合雷達仿真參數設置

表2 8部混合雷達仿真結果
根據表1的參數進行設置,進行1 000次蒙特卡洛實驗,分選的結果用分選正確率表示。若分選出的雷達部數與類型都正確,且到達角誤差在3°內,PRI誤差在10 μs以內,載頻誤差在3 MHz以內,脈寬誤差在3 μs以內,則認為分選正確。本算法在應對復雜環境的時候,具有良好的分選性能,平均分選正確率達到90%以上,該結果滿足在復雜的電磁環境下對于分選性能的需求。在仿真條件下,算法的良好分選性能為下一步的硬件實現提供了重要的參考依據。
2 偵察功能的高效實現
在高效實現方面,算法的執行效率、數據的傳輸速率都是至關重要的考慮因素。系統的整體性能不僅取決于各個功能模塊的執行速度,還與各個模塊間的協作程度有關。
2.1 軟硬件協同處理
ZYNQ芯片的軟硬件協同設計能力是其最具代表性的優勢之一,在實現中要充分結合PS與PL各自的優勢進行合理的功能劃分。脈沖描述字的測量僅需要移位和加法的迭代操作,可在可編程邏輯門陣列中高效實現,所以將脈沖描述字測量功能分配給PL實現。而將需要進行浮點運算與循環運行較多的分選算法分配給PS部分,通過C語言編程實現,得到高精度的分選結果,達到揚長避短、優勢互補的效果。
除此之外,ZYNQ提供了PS與PL之間多種數據傳輸的方案,考慮到PL端測量脈沖描述字將產生大量數據,所以將PL端數據寫入存儲到大容量的DDR3中,同時也便于PS端讀取。綜合上述因素,本文使用AXI_HP高性能接口。
使用PYNQ-Z2作為測試的評估板,板載ZYNQ芯片型號為XC7Z020,對AXI_HP接口的實際讀寫帶寬速率進行測試,測試時鐘速率設置為100 MHz,分別測試了單端口和四端口情況下的速率,結果如表3所示。

表3 AXI_HP通道讀寫速率(單位MB/s)對比
通過對比容易看出,測試值與理論值相差較大。主要原因是,該理論值的計算是接口寬度直接乘以時鐘速率,不包括任何的協議開銷。而在實際測試中,無論是單端口還是多端口的讀寫測試都要遵循傳輸協議,這將消耗一部分時間,導致測試值無法達到理論值的速率。
2.2 系統性能測試
2.2.1 運行時間測試
在評估板裸機狀態下測試分選程序的運行時間,以333組PDW數據為例,順序完成分選的各環節所需時間消耗如表4所示。

表4 單核分選耗時分析
由表4容易看出,總的分選時間為3.3 ms左右,在實際的電子偵察環境下,ms級的分選反應時間足以滿足系統對于偵察功能的需求。
2.2.2 分選結果對比
下面對硬件實現分選算法的正確性進行測試。仿真產生與表1設置參數相同的固定數目PDW數據,導入到評估板中,PS端首先讀取數據,然后進行分選,最后將分選結果上傳至上位機顯示,上位機接收到的分選結果如圖5所示。
對比表2的仿真結果與圖5的實測結果,可知硬件實現的分選結果中,雷達部數與類型正確,且每部雷達的參數在誤差允許范圍內與仿真結果相同,證明了分選算法在硬件實現上的正確性。

圖5 硬件實測結果上位機顯示
3 結束語
本文在基于ZYNQ的平臺上實現偵察功能,通過對比上板實測結果與仿真結果,分選功能可以較為準確地分選出多部雷達,符合實際需求。該方案使用了較為先進的ZYNQ芯片,并在實現功能時充分發揮各部分的優勢,為小型化無人平臺實現偵察功能提供了新穎的解決思路,對工程應用具有重要的參考價值。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55