一種異步干擾的自適應檢測和剔除方法
2022-05-06 04:46:44廉志凌
艦船電子對抗 2022年2期
廉志凌
(中國電子科技集團公司第三十八研究所,安徽 合肥 230031)
0 引 言
對于機載雷達來說,由于覆蓋范圍廣,導致它不僅面臨著來自空中的電磁干擾,地面干擾和地面雷達也會對雷達的回波信號帶來調(diào)制,進而影響雷達的性能。特別地,當干擾信號來自于同頻段雷達時,這種干擾稱為同頻異步干擾。
對于異步干擾信號,付啟眾已對其特點進行了分析,指出其有突出性、隨機性和高斯性3個特點,并在此基礎上提出了一種先將接收信號進行動目標指示(MTI)對消,然后采用恒虛警率(CFAR)結合距離雜波圖技術,最后采用門限檢測方法檢測干擾,使用鄰近信號替換干擾信號的處理辦法。
本文在對實測數(shù)據(jù)分析的基礎上,提出了先對回波信號正常處理,然后在頻域根據(jù)頻譜特性判定是否存在異步干擾,若不存在干擾,則處理流程不變;若存在干擾信號,則需要先剔除干擾信號再變換到頻域,并將原來存在干擾信號的頻域數(shù)據(jù)用剔除干擾之后的頻域數(shù)據(jù)替換。與付啟眾的方法相比,本文方法不改變正常的處理流程,實現(xiàn)簡單,運算量小,對平臺是否運動沒有要求。
1 異步干擾的特征
通信設備、廣電設備、導航設備以及地面雷達或者機載雷達均會產(chǎn)生電磁波。當這些設備發(fā)射的頻譜和雷達自身頻譜存在一定的重合時,干擾信號會進入接收機,對接收信號形成調(diào)制。
正常情況下,這些干擾設備或者距離雷達較遠,或者不在同一頻段,或者干擾從雷達的旁瓣進入,從而對于雷達的正常工作基本沒有影響。然而,當干擾從主瓣進入時,干擾信號將會與正常回波信號疊加,從而對信號的幅度和相位產(chǎn)生調(diào)制,在時域表現(xiàn)為幅度的突變(變強或者變?nèi)?和相位的跳變。
圖1為存在異步干擾時采集的實測數(shù)據(jù),其中圖1(a)、(b)為干擾所在距離單元的幅度特性和相位特性。可以看出無論是信號的幅度還是相位,相對于相鄰脈沖,均發(fā)生了跳變。
圖1(c)、(d)則為存在異步干擾時,一個相干積累時間內(nèi)雷達收到的回波數(shù)據(jù)的特性。其中圖1(c)為回波數(shù)據(jù)的時域特征,圖1(d)為回波數(shù)據(jù)的頻域特征。可以看到,異步干擾信號在時域表現(xiàn)為某些脈沖的部分距離單元的信號幅度異常(增加或減小),在頻域則表現(xiàn)為頻譜展寬。通常情況下,我們都是在頻域檢測目標的,干擾頻譜的擴展將會使得一些目標很難被檢測到。
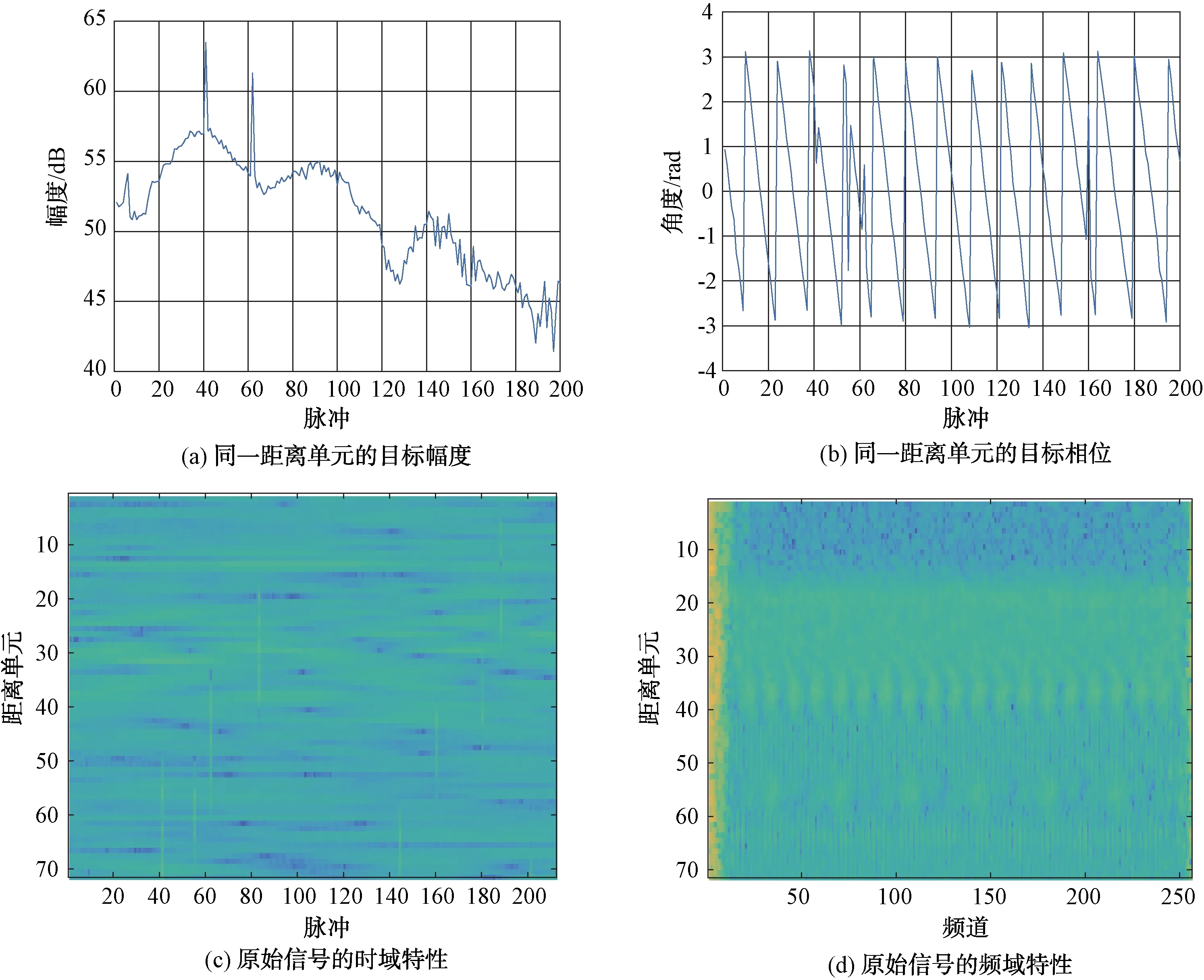
圖1 存在干擾時的信號特征
2 異步干擾的檢測和剔除
顯然,異步干擾的存在會引起雜波譜展寬,可以據(jù)此檢測在頻域回波中是否存在異步干擾。當不存在干擾,或者干擾的影響不大時,依然按照正常處理流程處理;當系統(tǒng)檢測到異步信號時,啟用插值處理,剔除干擾,檢測目標,算法流程如圖2所示。
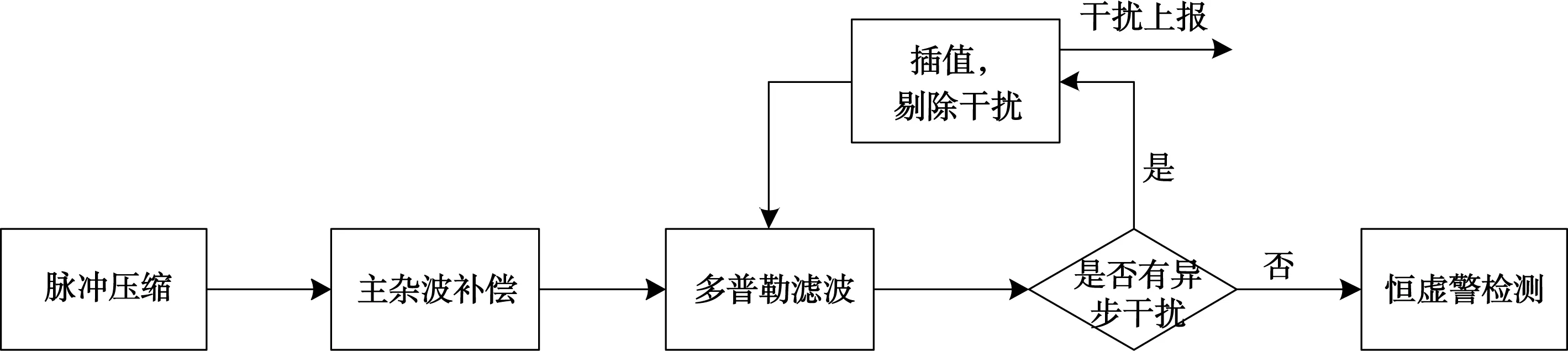
圖2 異步干擾抑制流程
2.1 異步干擾的檢測
異步干擾檢測的原理是,異步干擾的存在會造成雜波譜展寬,抬高系統(tǒng)的噪底。因此,只要檢測系統(tǒng)的噪聲水平,即可確定是否存在異步干擾信號,系統(tǒng)流程圖如圖3所示。算法步驟如下:
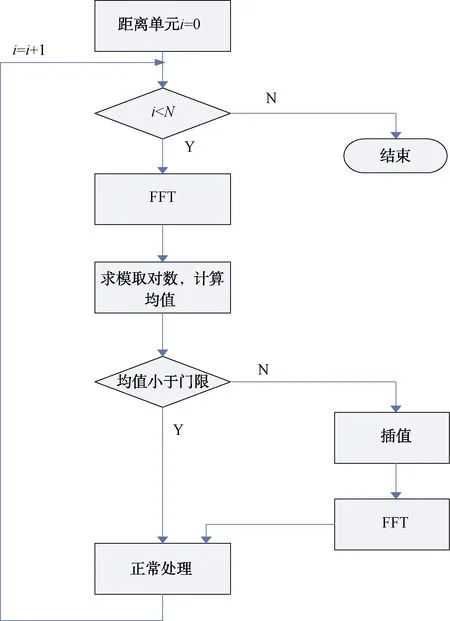
圖3 干擾檢測的流程圖
(1) 首先對分距離單元對雜波補償后的回波信號進行快速傅里葉變換(FFT),變換到頻域;
(2) 對頻域信號進行求模取對數(shù);
(3) 對對數(shù)數(shù)據(jù)剔除主雜波之后,求取均值;
(4) 將該均值與檢測門限比較,若大于檢測門限,則說明信號中存在干擾,則需要先插值,然后重新進行FFT變換;
(5) 返回第一步,直至所有距離單元處理完成。
2.2 噪聲背景估計
上述干擾檢測中的門限是由系統(tǒng)的噪聲門限加上手動門限組成的。手動門限的設置不能太高,過高會造成干擾檢測的漏警;也不能設置過低,過低會將正常信號當成干擾信號,增加不必要的運算,甚至造成正常信號的頻譜變差。
而噪聲門限的計算方法與上述方法類似,不同之處在于采用迭代方法估計系統(tǒng)噪聲,方法步驟如下:
(1) 首先對分距離單元對雜波補償后的回波信號進行FFT,變換到頻域;
(2) 對頻域信號進行求模取對數(shù);
(3) 對對數(shù)數(shù)據(jù)剔除主雜波之后,求取均值;
(4) 對整個回波信號每個距離單元的均值求和,然后求取二次均值。
噪聲背景更新的公式為:

(1)
式中:為更新后的噪聲門限;-1為更新前的噪聲門限;為當前波位的噪聲均值;為需要滑窗的波位個數(shù)。
2.3 插值處理
雷達在某個脈沖接收到的回波信號可表示如下:
=·exp(j2π(-1)+j2π)+
(2)
式中:為系統(tǒng)的幅度響應;為多普勒頻移;為線性調(diào)頻信號的調(diào)頻率;為距離上的快時間;為方位向的慢時間;為系統(tǒng)噪聲;為脈沖號。
假定某個距離單元的第個脈沖存在異步干擾,則第-1、、+1脈沖的信號可分別表示如下:
-1=-1·exp(j2π(-1)+j2π)+-1
(3)
=·exp(j2π+j2π)++
(4)
+1=+1·exp(j2π(+1)+j2π)++1
(5)
一般來說,信號或者雜波的強度遠大于噪聲的強度,在這里可以將其忽略,則上述信號可分別表示如下:
-1=-1exp(j-1)=-1·exp(-j2π)·
exp(j2π+j2π)
(6)
=exp(j)=·
exp(j2π+j2π)+
(7)
+1=+1exp(j+1)=+1·
exp(j2π)·exp(j2π+j2π)
(8)
顯然,如果沒有干擾信號的話,-1,和+1近似滿足線性相位關系,同時,在這么短的時間內(nèi),幅度-1、、+1也可以認為近似滿足線性關系,這是通過插值估算的理論依據(jù)。

(9)

(10)
2.4 實測數(shù)據(jù)的處理
將本文方法應用于上述實測數(shù)據(jù),處理結果如圖4所示。從圖4可以看出,信號的幅度和相位更加平滑,脈間跳變基本消失,反映到頻譜上,就是雜波區(qū)和噪聲區(qū)更加明顯,提高了目標的檢測能力。
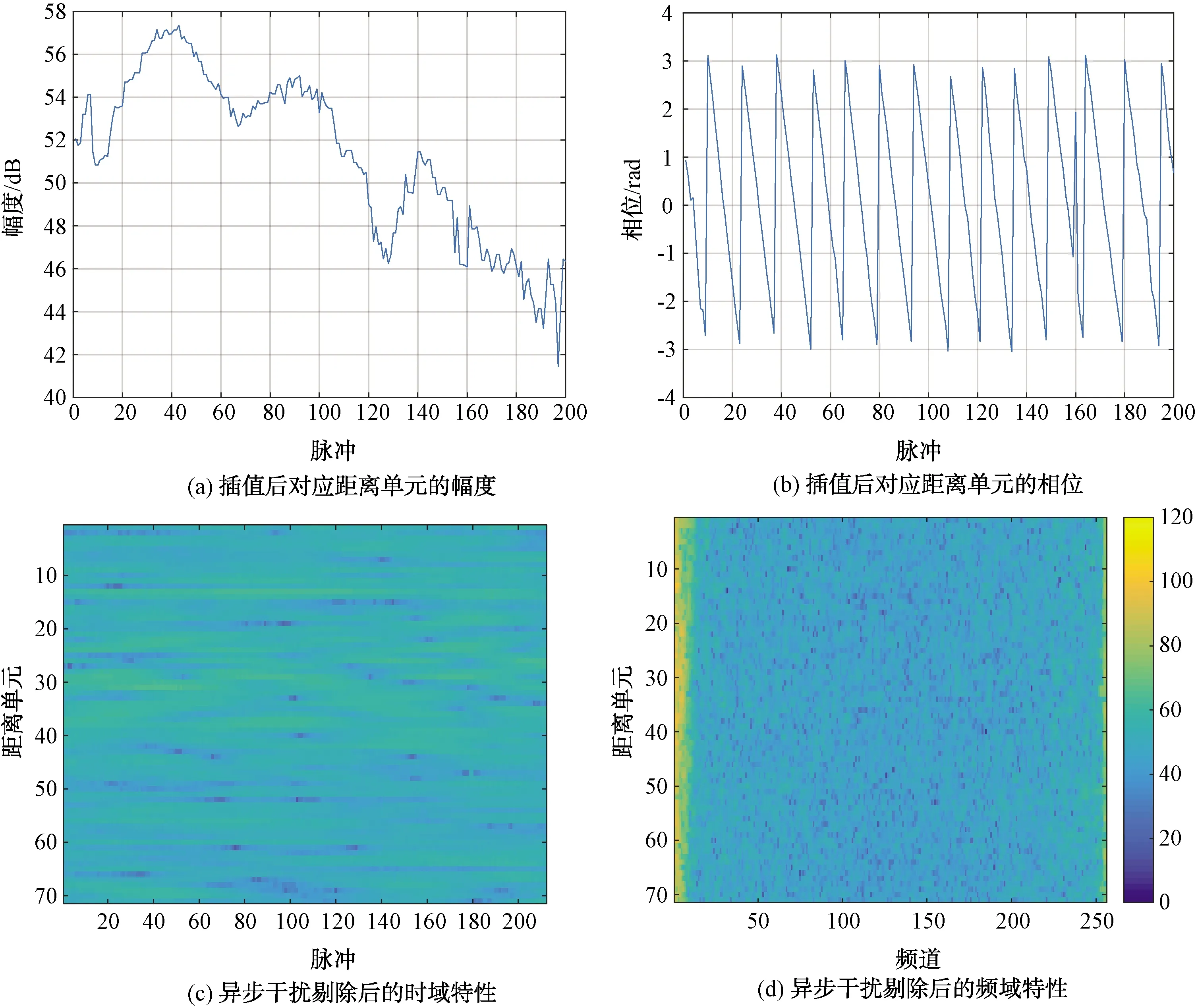
圖4 干擾抑制之后的信號
3 結束語
本文提出了一種在頻域自適應檢測異步干擾,并進行干擾剔除的方法。由于在系統(tǒng)不存在干擾的波位或者距離單元,不需要插值運算,可大大降低系統(tǒng)運算量。同時,由于本文所提方法基本不依賴于雷達的應用場景,可應用于包括但不限于機載雷達的異步干擾抑制,而實測數(shù)據(jù)的處理結果則驗證了本文所提方法的有效性。
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25