Phantom 4 Pro無人機傾斜攝影測量像控點布設密度探討
2022-05-15 03:28:36嚴亞敏
陜西水利 2022年4期
焦 旺,嚴亞敏,張 壁
(陜西省水利電力勘測設計研究院,陜西 西安 710001)
1 前言
無人機傾斜攝影技術近幾年發展如火如荼,利用無人機傾斜攝影技術建立的數字三維模型,廣泛應用于數字城市、工程智能化管理以及應急救災等領域。傾斜攝影三維模型直觀反映地物真實樣貌[1],加入像片控制點后,具有較高幾何精度。無人機傾斜攝影測量已成為測繪大比例尺地形圖又一技術手段。商建偉[2]、馬學峰[3]等眾多學者均對利用傾斜攝影技術測繪大比例尺地形圖的技術流程進行了研究,但就像控點布設方案的討論較少。
像片控制點是實測于地面可在影像上清晰分辨的特征點位,是攝影測量中實現像空間坐標系向地面空間坐標系轉換的唯一參照。傾斜攝影測量中,單位面積布設像控點越多,對成果精度越有利,但過密的像控點會延長測量周期,增加勞動成本,甚至延誤項目工期。現行《傾斜航空數字攝影技術規程》(GB/T 39610-2020)未對像控點布點方案作出明確規定。在保證成果精度的前提下,確定適宜的像控點布設密度,提高像片控制測量工作效率,是本文探討的重點。
大疆Phantom 4 Pro無人機是一款經典的消費級單鏡頭多旋翼無人機。該機輕便靈活、成本低廉,其自帶相機可在云臺控制下調整鏡頭俯仰,在專業飛控軟件的控制下,可以通過多架次不同方向不同角度的拍攝,獲取同一區域完整的傾斜攝影數據,適宜在小型攝區的低空數字攝影測量中使用。Phantom 4 Pro無人機相關技術指標見表1。
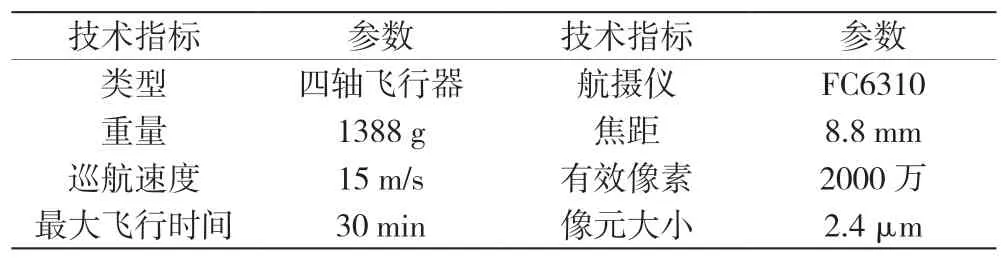
表1 大疆Phantom 4 Pro 無人機相關技術指標
2 研究方法
2.1 無人機傾斜攝影測量技術流程
接到傾斜攝影測量任務后,首先要明確測量范圍和精度要求,制定技術方案,并按照規定申請空域。空域獲批后方可在獲準的時間和范圍(高度)內開展無人機傾斜航空攝影工作。像控測量一般在外業航飛前完成,像控點應將測量范圍完整覆蓋,可布設為地標點,也可測量地面既有特征點。航飛應選在風速小、光照好的時段進行。航飛時,像控點如遭破壞或遮擋,應進行補測。航飛完成后,對影像質量進行檢查,如航線彎曲過大、影像重疊不足或有云霧遮擋、漏拍等情況,應進行重飛補飛。數據預處理完成后進行空三計算,如空三計算失敗或不合格,可多次重復計算,并從POS數據、像控點測量精度等方面查找原因,必要時進行重飛。空三計算合格方可進行三維建模,建模完成后,利用檢查點對三維模型精度進行檢查。經精度檢查合格的三維模型可用于地形圖的生產。
2.2 研究思路
選取采用Phantom 4 Pro無人機完成的平地和丘陵地兩處傾斜攝影測量項目數據作為實驗數據,分別用攝區布設的全部像控點和經過抽稀的像控點對傾斜攝影數據進行處理計算,使用檢查點對不同密度像控點參與空三計算生成的三維模型成果精度進行檢查統計,對比不同像控點密度下三維模型成果精度,進而探討不同測圖比例尺和精度要求的傾斜攝影測量項目像控點布設密度的推薦值。
2.3 精度指標
傾斜攝影數字三維模型的平面精度和高程精度可分別用地物點平面位置中誤差和高程注記點高程中誤差來衡量。地物點平面位置中誤差的計算方法是:利用平面檢查點的實測坐標和在三維模型上量取的相應位置坐標計算平面位置較差,再用中誤差公式計算平面位置中誤差。高程注記點高程中誤差則利用高程檢查點的實測高程和在三維模型上相應位置量取的高程之差計算。檢查點數量少于20 時,以誤差的算術平均值代替中誤差;檢查點數量大于等于20 時,中誤差按如下表達式計算:
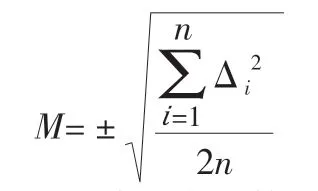
式中:M為中誤差;n為檢查點總數;Δi為較差。
3 實驗及分析
3.1 實驗一
3.1.1 攝區概況
攝區地形平坦,長約1.0 km,寬約0.8 km,呈矩形,最大高差30 m,需測制1∶1000 地形圖。按照航向500 m和旁向400 m的間距共布設9 個像控點,布設圖見圖1。攝區布設了4 個平面檢查點和67 個高程檢查點用于精度檢驗。無人機航飛相對航高設為250 m,航向重疊度設為70%,旁向重疊度設為60%,攝影基線長度為60 m,航線間距為145 m,攝區最低點影像地面分辨率為0.07 m。
中國石油和化學工業聯合會會長李壽生提出了同樣的觀點:“鹽湖是青海最重要的資源,也是國家的戰略資源。確立資源綜合利用,發展循環經濟,依靠技術創新,向制造業下游和高端產品延伸產業鏈,青海鹽湖正在夯實循環經濟的鹽橋,不斷延伸高質量發展的鹽路,開創世界無機鹽產業建設鎂鋰鉀鹽的中國高地。”
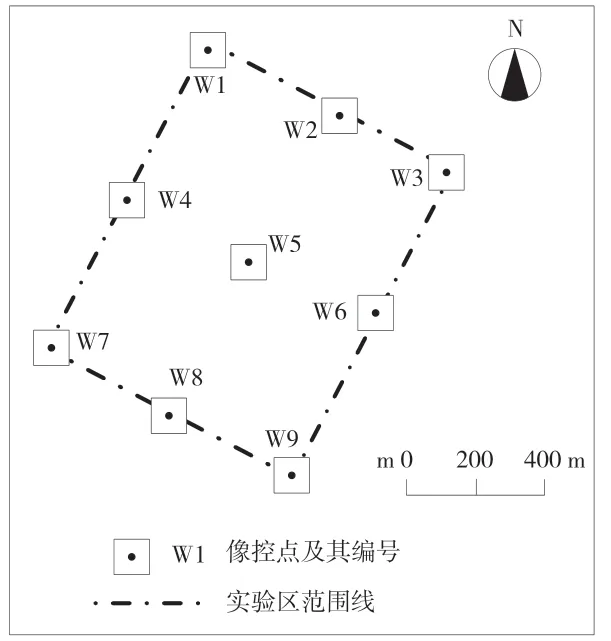
圖1 實驗一像控點分布
3.1.2 計算方案
方案A:使用攝區布設的全部像控點參與空三計算,像控點間距400 m~500 m。方案B:選取攝區四角和中心5 個像控點參與空三計算,像控點平均間距640 m。
3.1.3 精度統計
統計A、B兩種方案處理數據生成三維模型的平面和高程精度,結果見表2。
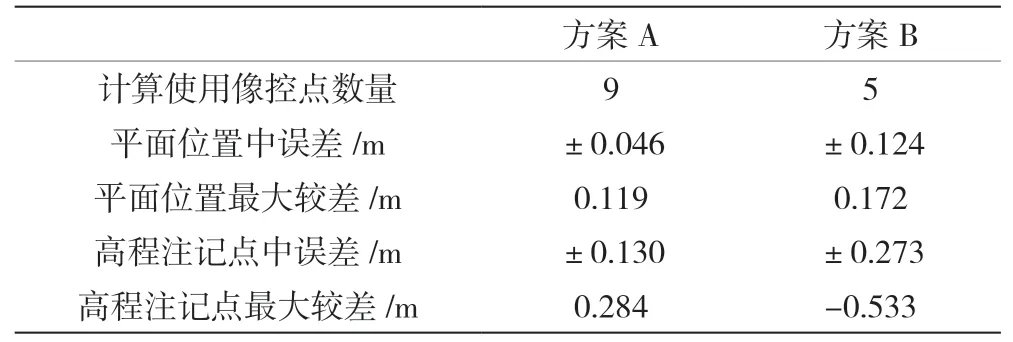
表2 實驗一三維模型精度統計結果
實驗一兩種計算方案三維模型實際中誤差與規范[4]允許中誤差對比見圖2。
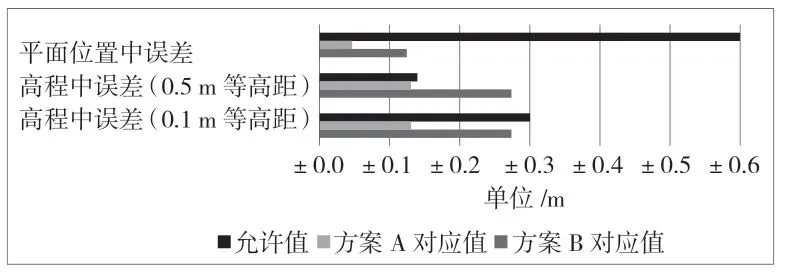
圖2 實驗一兩種計算方案實際中誤差與允許中誤差對比
3.1.4對比分析
(1)就平面精度而言,航測平地1∶1000地形圖,地物點平面位置允許中誤差為±0.6 m。A和B兩種方案統計的地物點平面位置中誤差分別是±0.046 m和±0.124 m,均滿足規范[4]要求。
(2)就高程精度而言,航測平地1∶1000地形圖,等高距可以取0.5 m,也可以取1.0 m,相應的高程注記點高程允許中誤差分別為±0.14 m和±0.30 m。A和B兩種方案統計的高程注記點高程中誤差分別是±0.130 m和±0.273 m,如等高距選0.5 m,則只有方案A精度滿足規范[4]要求,如果等高距選1.0 m,則A和B兩種方案精度都滿足規范[4]要求。
3.2.1 攝區概況
攝區為黃土高原丘陵地形,面積約0.8 km2,最高海拔910 m,最低海拔800 m,最大高差110 m,需測制1∶500地形圖。攝區按照不超過400 m的間距共布設12 個像控點,布設圖見圖3。攝區布設了6 個平面檢查點和45 個高程檢查點用于精度檢驗。由于攝區高差較大,將攝區分為兩個分區進行傾斜攝影。起飛點高程810 m,一分區航高250 m,主要對山丘進行航攝,航向重疊度設為80%,旁向重疊度設為70%,攝影基線長度為45 m,航線間距為110 m;二分區航高170 m,主要對溝道進行航攝,航向重疊度設為70%,旁向重疊度設為60%,攝影基線長度為30 m,航線間距為85 m。攝區最低點影像地面分辨率為0.05 m。
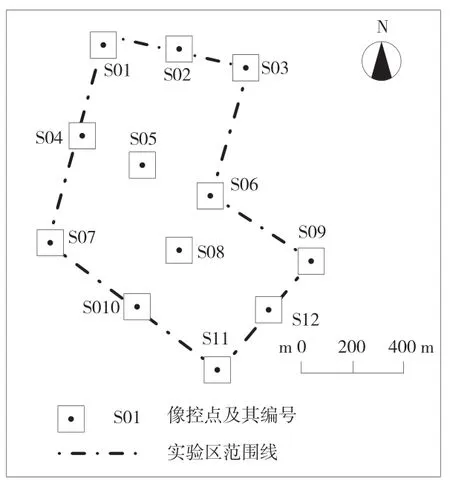
圖3 實驗二像控點分布
3.2.2 計算方案
方案E:使用攝區布設的全部像控點參與空三計算,像控點間距300 m~400 m;方案F:選取實驗區邊界拐角處6 個像控點參與空三計算,相鄰像控點最小間距為460 m,最大間
( )距680 m。
3.2.3 精度統計
統計E、F兩種方案處理數據生成三維模型的平面和高程精度,結果見表3。
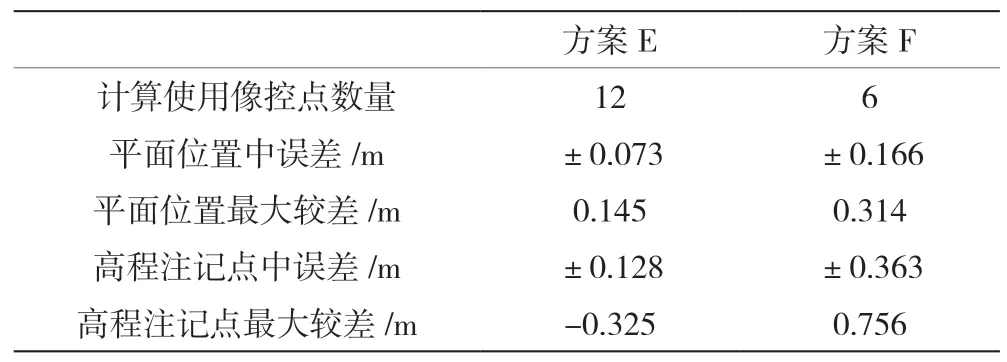
表3 實驗二三維模型精度統計結果
實驗二兩種計算方案實際中誤差與規范[4]允許中誤差對比見圖4。

圖4 實驗二兩種計算方案實際中誤差與允許中誤差對比
3.2.4 對比分析
(1)就平面精度而言,航測丘陵地1∶500 地形圖,地物點平面位置允許中誤差為±0.3 m。E和F兩種計算方案統計的地物點平面位置中誤差分別是±0.073 m和±0.166 m,均滿足規范[4]要求。
(2)就高程精度而言,航測丘陵地1∶500 地形圖,等高距可以選0.5 m,也可選取1.0 m,相應的高程注記點高程允許中誤差分別為±0.20 m和±0.40 m。E和F兩種計算方案對應的高程注記點高程中誤差分別是±0.128 m和±0.363 m,若等高距取0.5 m,則只有方案E精度滿足規范[4]要求,若等高距取1.0 m,則E和F兩種方案精度都滿足規范[4]要求。
4 結語
本文對通過兩個實驗分別對基于Phantom 4 Pro無人機的平地1∶1000傾斜攝影和丘陵地1∶500 傾斜攝影使用不同密度像控點處理數據的成果精度進行對比研究,得出以下結論:
(1)在攝區像控點布設密度適當的情況下,基于Phantom 4 Pro單鏡頭多旋翼無人機的傾斜攝影成果數據,精度滿足生產平地、丘陵地乃至山地1∶500、1∶1000、1∶2000地形圖的要求。
(2)測圖比例尺和測圖等高距限定了航測地形圖平面和高程允許中誤差,進而影響無人機傾斜攝影測量中像控點布設密度的確定。允許中誤差越小,精度要求越高,像控點布設密度應越高。
(3)針對Phantom 4 Pro這一機型,測量1∶500 地形圖,測區相對航高宜在150 m~180 m選擇,如測圖等高距取0.5 m,建議按350 m間距布設像控點,如測圖等高距取1.0 m,建議按500 m間距布設像控點;測量1∶1000地形圖,測區相對航高宜在250 m~300 m選擇,如測圖等高距取0.5 m,建議按照500 m間距布設像控點,如測圖等高距取1.0 m,建議按照650 m間距布設像控點。