基于滑動離散傅里葉變換的中性點不接地直流配電首次故障檢測
2022-07-30 12:19:40趙勇囈趙創業孫振興
科技風 2022年17期
趙勇囈 趙創業 孫振興
國網安徽省電力有限公司淮北供電公司 安徽淮北 235000
隨著新能源的推廣和城市負荷的不斷增加,用戶對電能質量的要求不斷提高。相比交流電網,直流電網供電量更大、易并網、抗干擾、可抑制環流[1]。但是現階段對低壓直流系統的接地方式、故障分析、故障隔離等研究較少。中性點不接地系統可在首次故障時保持服務連續性[2],在未接地的系統中,一旦出現第一個故障,應由永久絕緣監視器(PIM)檢測并采取必要的行動。
PIM的無源技術[3],如電壓表平衡法。但潮濕的環境會使導體絕緣電阻會下降,此時的無源技術將無法檢測對稱故障。為克服這一困難,提出注入信號技術估計故障阻抗。電力電子轉換器的共模EMI濾波器有連接到地的電容器,這在故障期間提供了接地的路徑,會導致危險的接觸電壓。此外,電容與地的交流路徑給PIM的實現帶來了困難,故障阻抗的阻性和容性成分是通過使用傅里葉分析來確定的。這些程序需要快速準確地計算正余弦函數,可使用雙查找表法。用傅里葉分析法注入交流信號來估計交直流分布中的阻抗。該技術已成功應用于陸基直流微電網技術。
本文提出用交流注入和SDFT法檢測第一次故障,第二節解釋了SDFT的過程,第三節展示了雙重查找表的高效實現,第四節解釋了SDFT的Goertzel算法實現,第五節給出了仿真和實驗結果,第六節總結。
1 中性點不接地系統首次故障檢測
(a)
(b)
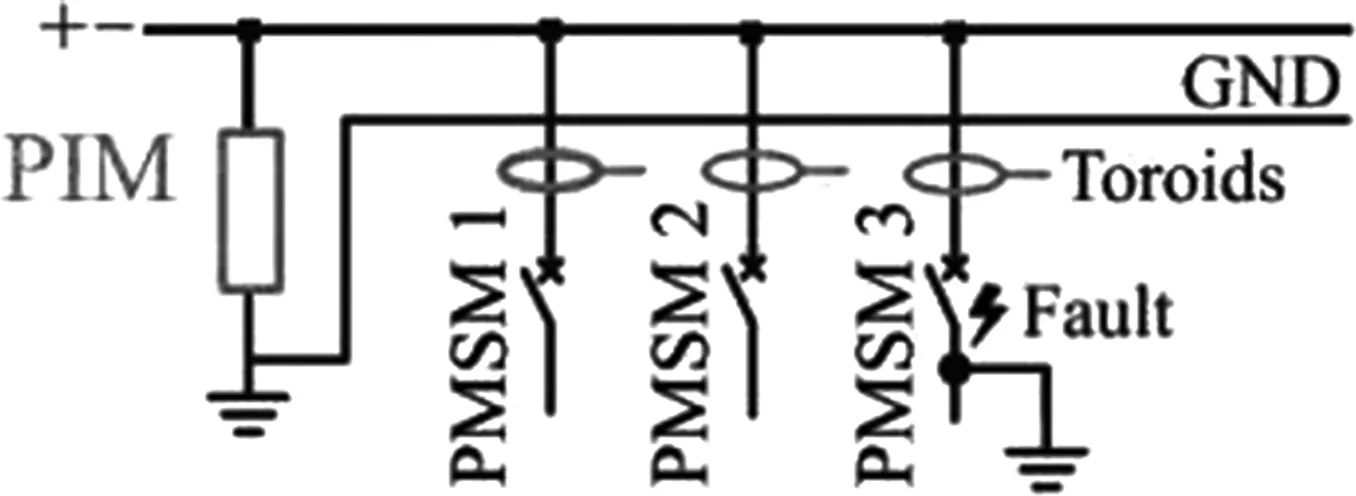
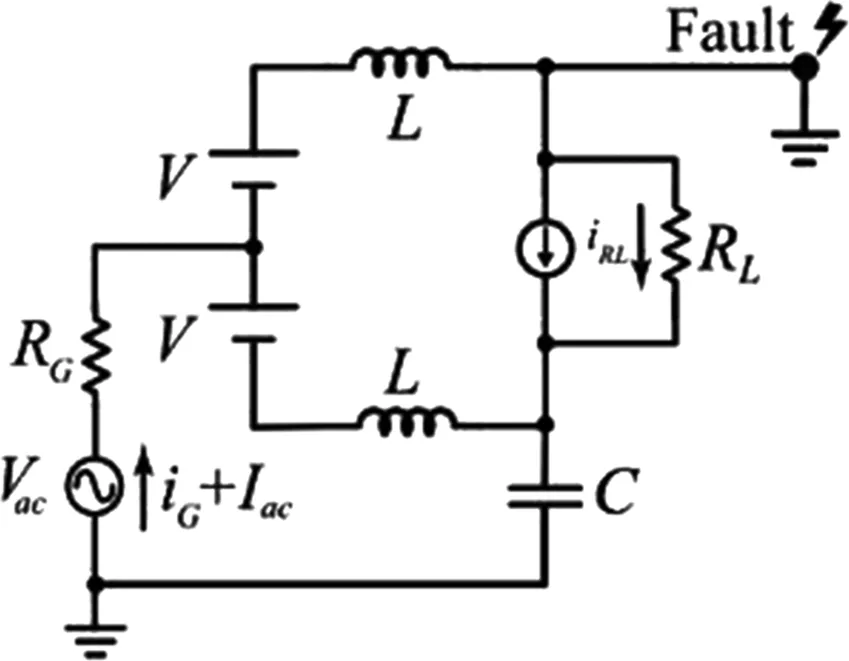
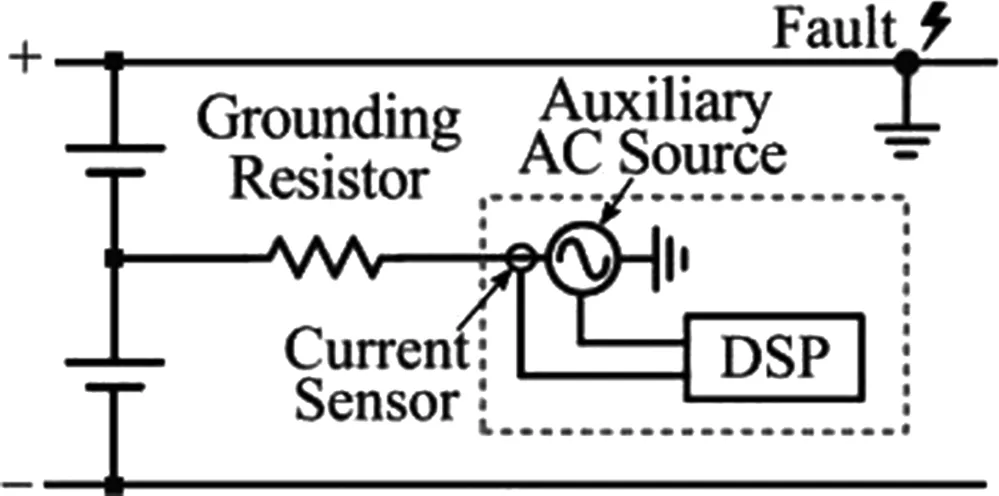
(c)圖1 (a)使用輔助交流電壓源進行首次故障檢;(b)PIM;(c)使用交流電流源進行故障跟蹤
圖1(a)為注入角頻率為ωac的交流電流的過程。測量接地電流的交流分量可以估計故障電阻Rf:
(1)
PIM的結構如圖1(b)所示。如圖1(c)所示,一旦檢測到故障,電流傳感器就能定位故障,再檢測選定的角頻率ωac的電流分量,就可判斷出接地故障。
離散傅里葉變換可直接測量故障阻抗[4]。不同的光譜分量在時間窗內計算如下:
(2)
注入交流電的周期Tac=2π/ωac,如果考慮與Tac持續時間相同的矩形窗口,則對應N個離散樣本,使NTs=Tac,Ts為采樣周期,結果是N=2π/(TSωac),式(2)可表示為:
(3)
該公式有一個額外的樣本作為延遲,基本分量k=1時:
(4)
(a)
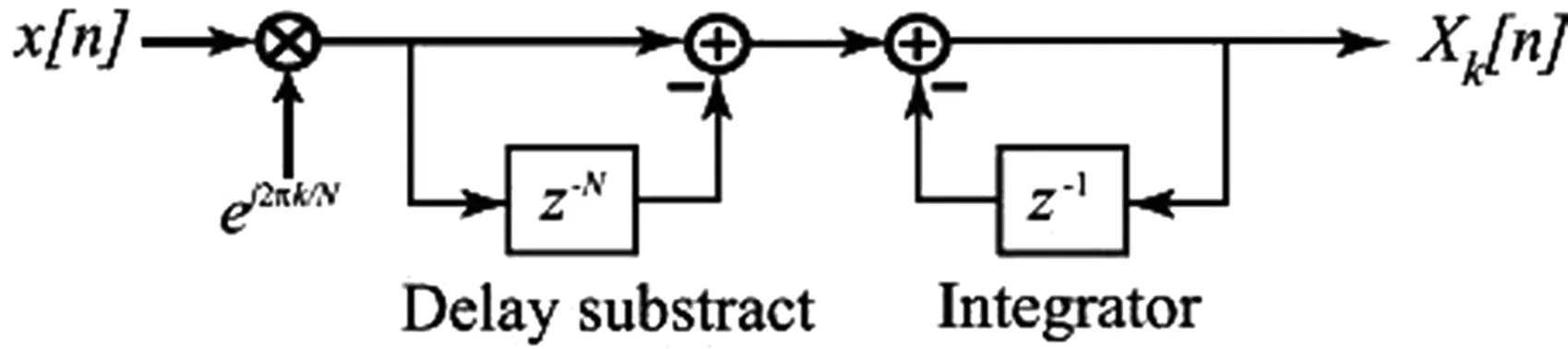
圖2(a)是SDFT實現的框圖,定義圖2(b)所示的復雜序列:
(5)
可以將前一個序列y[n]通過一個MAF來計算基本分量:
(6)
MAF可表示為雙延遲積分器:
(7)
在z域,該式等于:
(8)
因此,MAF的響應延遲為:
(9)
可以看出,ωac決定PIM的檢測速度。圖2(b)為電流和電壓信號的振幅和角度的計算過程。
2 雙查找表的高效實現
正余弦函數的計算使用了雙查找表。主表的分辨率為ΔT=90°/NT,其中NT為數據點個數。主表的一個條目以Nt間隔細分,并構造兩個表(正弦和余弦),次表的分辨率為:
(10)
角度近似為θ=nTΔT+ntΔt,nt和nT分別為最高和最低有效位。計算這些值使用了角和的正弦關系:
sin(θ)≈sin(nTΔT+ntΔt)
=sin(nTΔT)cos(ntΔt)+cos(nTΔT)sin(ntΔt)
(11)
元素的總數是Nmw=NT+2Nt。考慮Nmw是一個固定的數,式(10)中NT和Nt應該使Δt最小。解dΔt/Nt=0和NT=Nmw+2Nt,可得:
NT=2Nt=Nmw/2
(12)
完成了兩級表的運算,就可通過二次迭代sin(α+k)=sin(α)cos(k)+cos(α)sin(k),其中α表示高階位,k表示低階位,獲得更高的精確度。
3 SDFT的Goertzel算法
SDFT的一個特性是它可以迭代:
(13)
上式考慮了一個采樣的計算延遲。由于只需計算基本分量,結果如下:
(14)
4 仿真結果
圖3顯示了使用MATLAB/Simulink進行仿真的系統結構以及所有參數。一般選擇地電阻值為Rg=50kΩ,允許第一次故障循環電流30mA、150V交流的電壓源,比直流電壓低20倍。
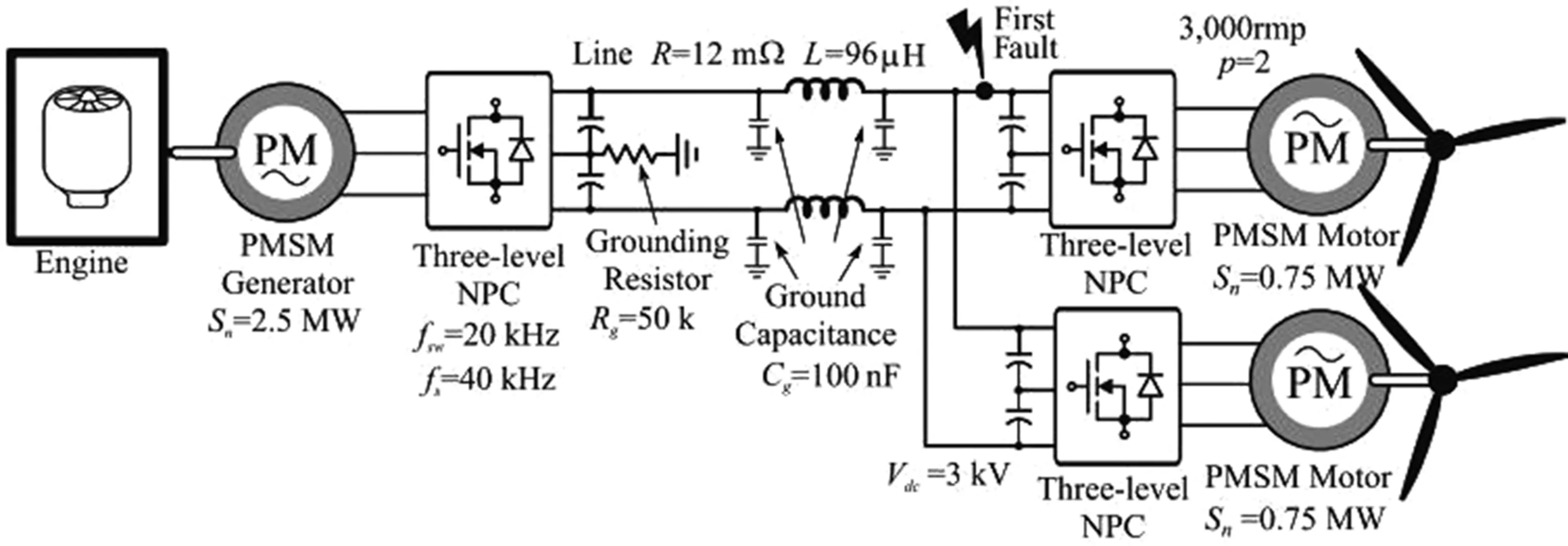
圖3 仿真實驗的HEA結構以及各種參數
圖4顯示了發電機側對地電壓和通過接地電阻的電流。由于對地電容,電壓從0.5p.u突然升到1p.u。這些高頻振蕩很容易被底層的MAF濾波器過濾掉。
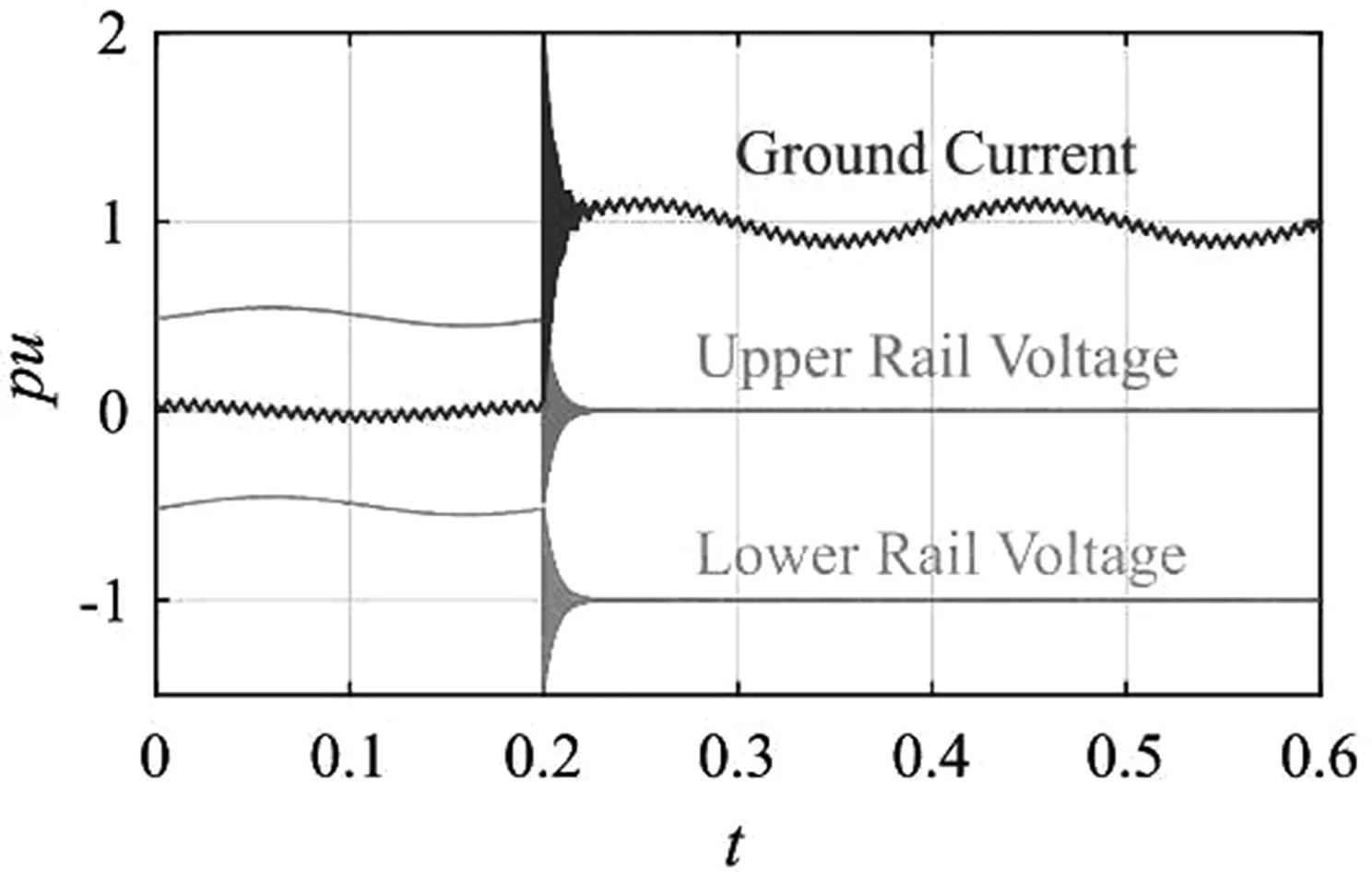
圖4 發電機側直流電壓和對地電流
圖5說明了輔助交流電源加強了電壓,電流通過接地電阻循環流動。最初,因為缺少對地電容,通過接地電阻的電流為零。t=0.6s時高軌第一次故障后,由于輔助交流電源,電流有交流分量。故障后的電壓偏移是由于交流電源的內部阻抗。電流和電壓測量采用中量程示波器,精度為3%,接地電阻標準公差為10%。
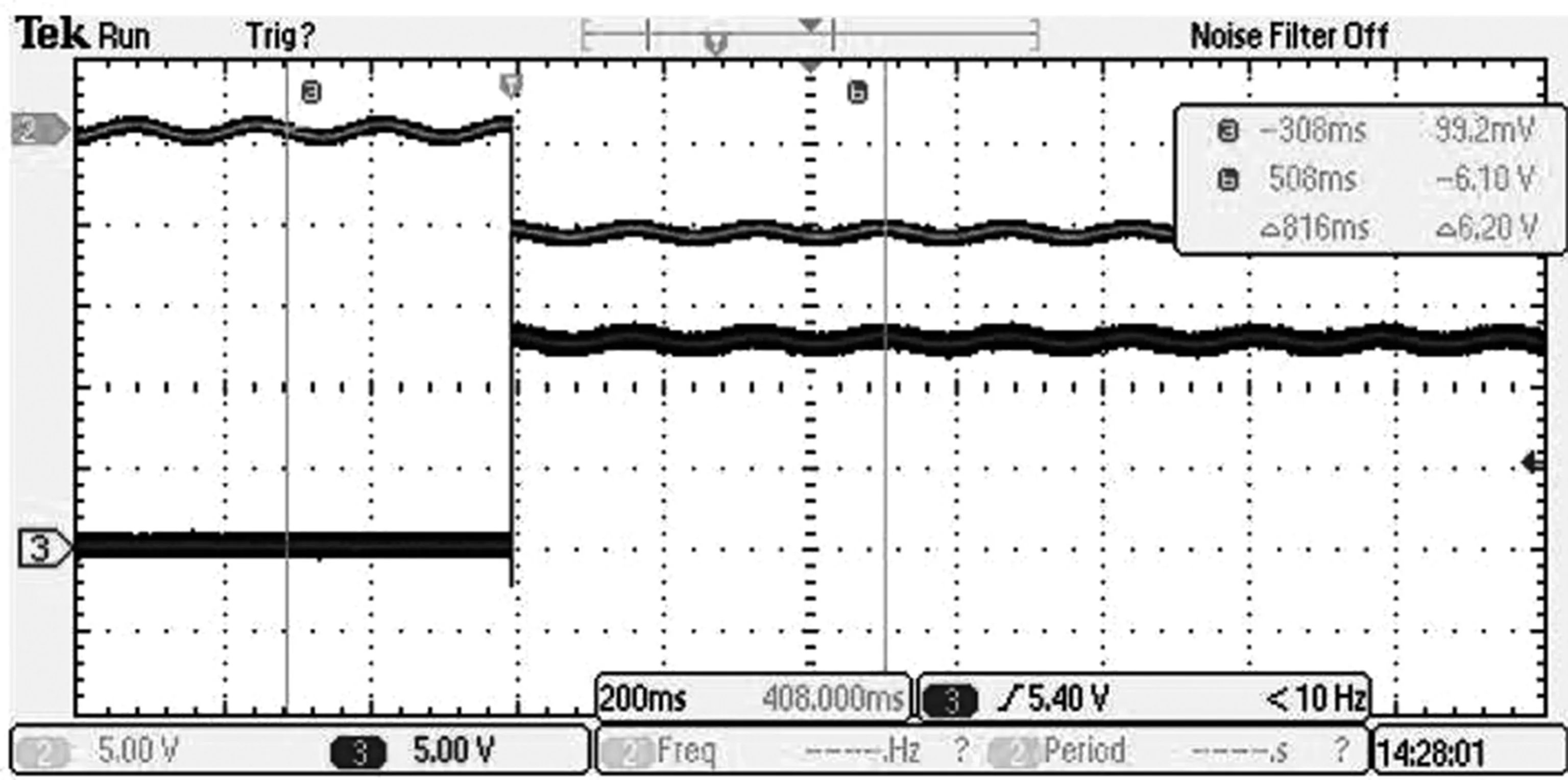
圖5 地面電流和軌道電壓
圖5對應的測量值記錄在由示波器生成的Excel文件中,采樣頻率為250MHz。
結語
本文提出了一種基于SDFT的精確且計算效率高的中性點不接地系統PIM算法。由于在SDFT中大量的MAF濾波,首次故障檢測方法即使在有噪聲的情況下也能有效地估計故障阻抗。雙查找表法減少了三角函數的計算。基于Goertzel算法的SDFT具有較小的計算負載,可以使用集成在環形線圈上的低成本微控制器進行故障定位。
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
今日農業(2021年14期)2021-10-14 08:35:28
海峽姐妹(2020年8期)2020-08-25 09:30:18
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年6期)2015-04-17 03:31:50