水下仿生貝殼電磁驅動器動力學分析
2022-10-21 08:14:40黃興保楊斌堂
噪聲與振動控制 2022年5期
崔 磊,黃興保,楊斌堂
(上海交通大學機械系統與振動國家重點實驗室,上海 200240)
隨著工業的飛速發展和人口的不斷增長,陸地上可利用的資源日趨匱乏,因此合理開發和利用海洋中各類資源對人類的發展來說是必不可缺的。無人水下航行器和水下機器人在海洋探索、環境監測、資源開發、攝影記錄等眾多方面起著不可替代的作用,而水下推進方式直接決定了各類水下運動系統的動力特性[1-2]。海洋生物種類繁多,經過長久的進化,大多都具有適應水下生存的外形構造和水中運動的方式,根據已知海洋生物主要運動方式所產生的推進力進行分類,當前的水下仿生推進機制主要包括:模仿魚類和海豚鯨魚類,借助身體和魚鰭波動或擺動時產生的渦流推進,并分為奇鰭/對鰭(Medial and Paired Fin,MPF)推進、身體/尾鰭(Body and Caudal Fin,BCF)推進[3-5];模仿扇貝、水母和章魚等將流體吸入后再快速噴出從而實現噴射推進[6]。
在上述的推進方式中,鰭/體的推進方式得到了廣泛的關注,雖然噴射推進已經被證明有效,但相關的研究仍較少,特別是關于仿生貝殼推進機構的研究。目前已有的模仿章魚或水母噴射運動的機器人,例如使用脈沖噴射推進技術開發的軟體機器人最大能夠達到4 cm/s 的運動速度,然而頭足類的柔軟體導致其難以生活在復雜而不穩定的水下環境[7]。研究發現,雙貝類貝殼獨特的外形結構能使其更好地存活在復雜的水下環境中并減小其運動過程中受到的流體阻力,此外,該貝殼的噴射推進方式容易實現且最高能達到每秒7 體長的運動速度[8]。但目前很少有使用雙貝類貝殼作為研究對象的仿生推機構,有學者利用磁力驅動和電機驅動借助仿生貝殼研究其在低雷諾數下的往復運動[9],但其外形與自然界中的貝殼差別較大,還有學者分別利用往復曲柄機構及旋轉電機研制出了仿生貝殼機器人,最高能夠達到每秒4.65體長的瞬時運動速度[10-11]。仿生貝殼在運動過程中始終保持往復轉動,但之前學者的研究都以設計和實驗分析為主,并未建立其動力學模型并進行進一步分析。
受雙貝類貝殼結構和運動方式的啟發,本文提出一種基于電磁感應的仿生貝殼水下驅動器,根據自然界中雙貝類貝殼結構設計仿生貝殼執行機構,以單側執行機構為研究對象,建立其動力學模型,提取模型中的關鍵參數之后構建驅動磁力矩以及永磁體之間磁力矩的數學模型并驗證其準確性,根據所設計的仿生貝殼和動力學參數優化目標來確定永磁體的陣列排布位置,分析優化后的執行機構動力學模型及其動力響應。本文主要內容包括仿生貝殼執行機構動力學分析、驅動磁力矩和永磁體間磁力矩建模計算、動力學參數優化等。
1 仿生貝殼驅動器結構
雙貝類貝殼通過往復的張開、閉合運動實現噴射流體推進,若將仿生貝殼放置于空心圓管內,它可以通過往復運動從而推動圓管中的流體運動實現驅動,還可以通過保持張開并與圓管內壁貼合從而阻斷管道中的水流。受其啟發,本文提出一種以仿生貝殼為執行機構,以電磁線圈、永磁體實現非接觸式直接驅動的水下驅動器,如圖1所示。
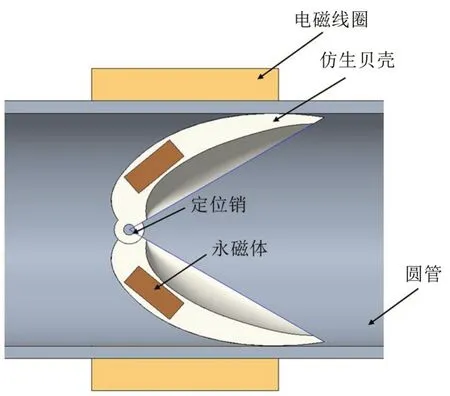
圖1 仿生貝殼驅動器結構
通過定位銷將仿生貝殼約束在圓管中使其僅能繞軸轉動,再將均勻磁化的永磁體對稱布置在仿生貝殼內側或表面,向放置在圓管外側的電磁線圈通入電流產生空間磁場,則永磁體在磁場中受到驅動磁力矩的作用帶動執行機構運動。相比于電機驅動,電磁非接觸式直接驅動具有結構簡單、響應快的優點,改變通入電流的幅值和頻率可以實現不同的驅動效果。此外,可以通過將多個驅動器同向串聯來提高整體的驅動能力。
2 仿生貝殼執行機構動力學模型
2.1 執行機構一般動力學模型
對于仿生貝殼驅動器,執行機構始終在一定范圍內進行往復轉動,以單側執行機構為研究對象,執行機構包括永磁體和仿生貝殼,如圖2所示,通過定位銷將執行機構約束在圓管內令其僅可繞軸轉動,設其轉動慣量為J,執行機構受到的力矩包括兩側永磁體之間的磁力矩T→pm和永磁體在通電線圈磁場中受到的磁力矩T→c,這兩項均與永磁體體的形狀尺寸、放置位置及磁化強度有關,此外,T→c還和通電線圈尺寸、位置及輸入電流相關,由于定位銷軸線垂直于地面,重力可忽略不計。
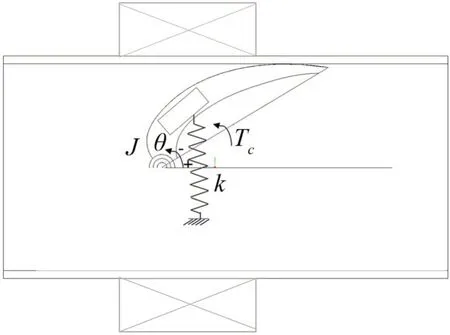
圖2 執行機構動力學模型
當仿生貝殼模型、永磁體參數及位置確定后,兩側永磁體之間的磁力矩T→pm僅與執行機構轉動角度θ有關,可以將T→pm等效為系統中彈性力產生的力矩,設其與轉動角度的比值為彈性系數K,執行機構運動過程還受到水阻尼的作用,設阻尼系數為C,永磁體在通電線圈磁場中受到的驅動磁力矩為外力矩,因此單側仿生貝殼的往復運動可以等效為執行機構的單自由度振動,忽略系統中可能出現的碰撞變形,根據剛體動力學方程可以建立其一般動力學方程:

對于質量連續分布的剛體,由轉動慣量定義和平行移軸定理可得J的計算公式為:

易知與外部輸入電流無關,且永磁體間磁力矩通常與它們之間距離的平方成反比,因此該模型中的彈性系數K一般是隨轉動角度改變,此外,由于永磁體的尺寸相對于線圈的尺寸不可忽略即動力學響應分析的外力矩幅值A隨著執行機構轉角變化而變化,因此該一般動力學模型為變剛度的非線性時變系統,系統復雜且難以分析其動力響應,之后將確定并優化各系統參數J、K、A從而簡化動力學模型便于進一步分析。
2.2 磁力矩模型
確定系統動力學模型參數首先需要建立和的數學模型,即推導計算系統靜磁力矩模型。
磁場是有旋無源場,計算永磁體在磁場中以及永磁體之間的磁場力和力矩時,常用的方法有等效磁荷法、等效電流法和有限元法等。本文分別根據等效磁荷法和等效電流法建立永磁體和電磁線圈的磁場模型。
等效磁荷模型將永磁體簡化為等效磁荷的分布[12-13],對于均勻磁化的永磁體,則可以等效為僅上下極面有磁荷分布的模型,σm為磁荷的面密度。假定始終大于,要使兩側的仿生貝殼同時張開或閉合,則兩側永磁體應對稱且同極相對布置,如圖3所示,當電磁線圈中通入圖示方向的電流時,根據永磁體的極面位置易知此時兩側執行機構均有閉合的運動趨勢,反之亦然。
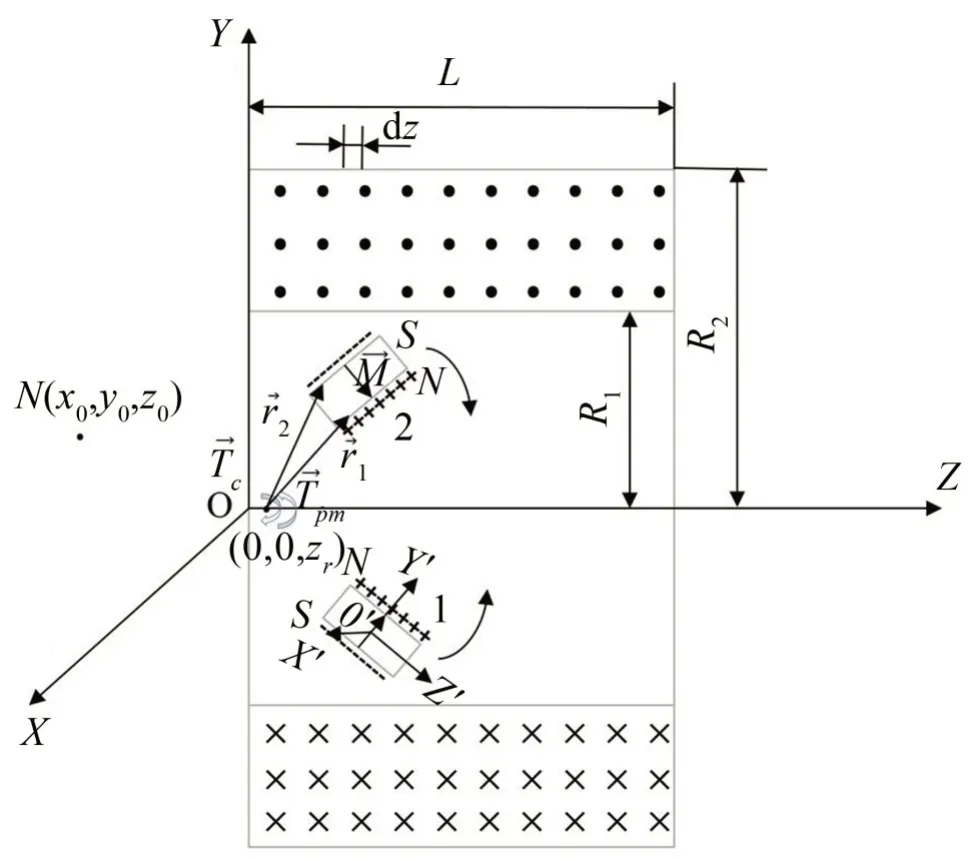
圖3 驅動磁力矩示意圖
推導和的顯式表達式需要先建立通電線圈和永磁體的磁場模型,分析其在空間任意點處產生的磁感應強度。
設有限長通電線圈長度為L,線圈內外徑分別為R、R+rc,單位長度的匝數為n,電流大小為I,在圖示直角坐標系中,由通電線圈的對稱性,僅需計算YOZ平面內的磁場分布,其中Y、Z分量分別為磁感應強度的徑向和軸向分量。根據畢奧-薩伐爾定律:

可以得到多層通電線圈在空間中任意點N(x0,y0,z0)處的磁感應強度沿y、z方向的分量為:
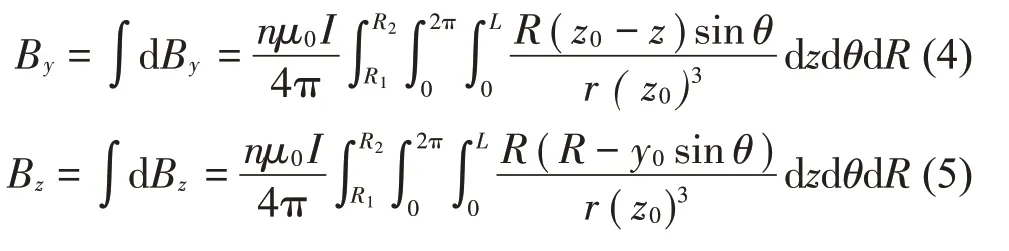
式中:μ0為真空磁導率,R1、R2分別為通電線圈的內外徑。通電線圈在任意點N處的磁感應強度為:

根據等效磁荷模型,永磁體極面的磁荷在空間中任意點產生的磁感應強度為:

對于兩個均勻充磁且同性極面平行相對的長方體形永磁體,幾何尺寸分別為2a×2b×2c和2a′×2b′×2c′,磁鐵的磁化強度矢量分別為和,且方向相反,在其中一個永磁體1 的幾何中心建立全局坐標系OXYZ,在磁鐵B的幾何中心建立局部坐標系O′X′Y′Z′,永磁體2的幾何中心在全局坐標系中的坐標為(x,y,z),研究永磁體2受到的磁場力,首先:
永磁體在點N處產生的磁感應強度在全局坐標系中可表示為:

由于執行機構僅能繞定位銷軸線轉動,本文僅需計算和的x方向分量。
考慮到磁荷極面之間的空間存在相對磁導率為μr的導磁介質,當導磁介質被外界磁場磁化后,極面上磁荷的面密度也會隨之改變,改變后的磁化強度與磁場的磁感應強度及永磁體的剩磁的關系式可得:

在有限長通電線圈內,轉軸位置處為(0,0,z′),則轉軸處到永磁體兩個極面上的任意磁荷的矢量分別為,則永磁體2受到的磁力矩為:
執行機構受到的驅動磁力矩的解析表達式不易獲得,為了驗證之前建立的磁場矩模型,采用有限元分析(FEA)的方法,借助Ansoft Maxwell 進行有限元仿真驗算。利用Ansoft Maxwell軟件可以計算出不同線圈匝數、通入電流、布置位置、初始永磁體轉角的情況下永磁體在磁場中受到的磁力矩。通過上文所推導的磁力計算公式,通過MATLAB計算相同參數條件下的磁力矩的數值解,此為公式預測值。將公式數值解與有限元仿真解進行對比,就可以判斷所建立模型以及推導公式的正確性和準確性。
仿真所選用的永磁體的材料為釹鐵硼NdFe35B,相關計算參數如表1 所示。為了驗證磁力矩公式,以永磁鐵2中心坐標y、z以及夾角α為變量,計算出永磁體不同位置與布置角度下的力矩值,通過對比理論推導得到的數學模型的數值計算結果和有限元法Ansoft Maxwell仿真結果來進行驗證。
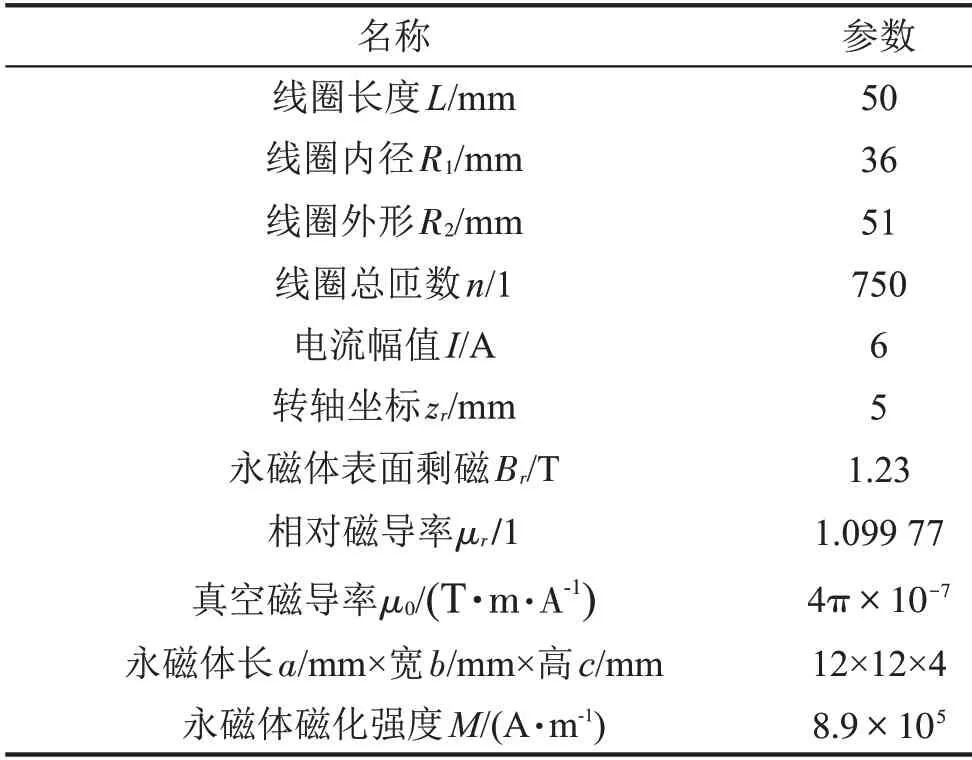
表1 模型驗證計算參數
由圖4 可以看出,數學模型計算與有限元仿真得到的磁力矩在不同位置及角度都能夠很好地吻合,相同參數對應的兩條曲線上的數據點之間誤差不超過5%。由于通電線圈磁場沿徑向變化且永磁體的尺寸相對于線圈尺寸不可忽略,因此永磁體所處的空間磁場非勻強磁場,但為了便于進行永磁體的位置排布,仍近似認為永磁體在通電線圈磁場中受到的磁力矩與其中心面和線圈軸線夾角的余弦值為線性關系。
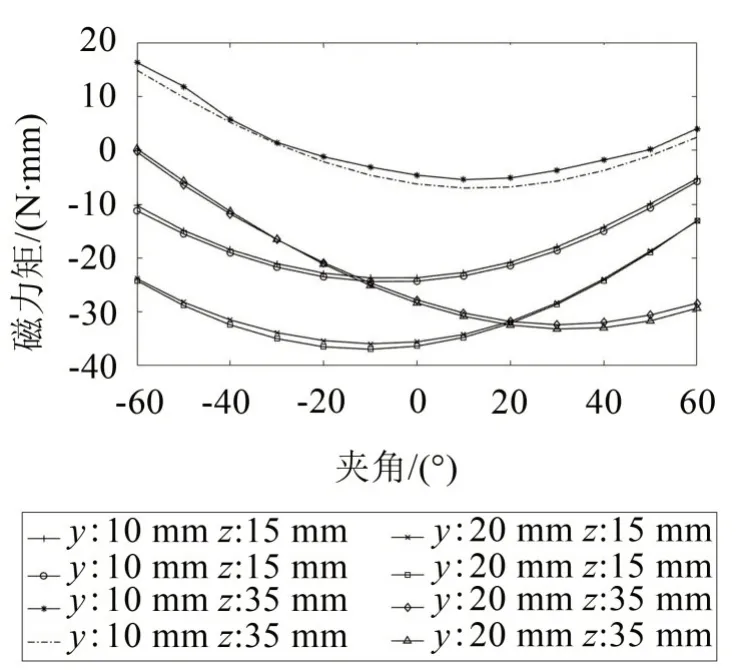
圖4 數值計算與仿真計算結果對比
2.3 執行機構優化設計
執行機構的設計包括仿生貝殼的建模設計以及永磁體位置的排布,當外部輸入電流一定時,執行的設計決定動力學參數,參數優化的主要目標是令彈性系數K和驅動磁力矩在執行機構轉動過程為常數且執行機構的平衡位置為轉動范圍的中間位置,從而將系統簡化為單自由度線性系統。
仿生貝殼的結構直接決定執行機構的轉動慣量以及水阻力的大小。經過以往的大量研究發展,大多數雙殼貝類都是以對數螺線的形式向外生長[14],對數螺線具有良好的結構力學和流體力學性質,本文根據對數螺線極坐標方程:

設計仿生貝殼模型,如圖5 所示,式中φ為螺線定角,ρ0為貝殼長度即轉軸到仿生貝殼最遠端的位置,再通過描點法和變比例掃描的方式構建仿生貝殼的三維模型。為了構造多組動力學參數進行對比分析,本文選取螺旋定角為40°,貝殼長度分別為70 mm、65 mm 建立兩組仿生貝殼模型,對應圓管內徑分別為65 mm、60 mm。
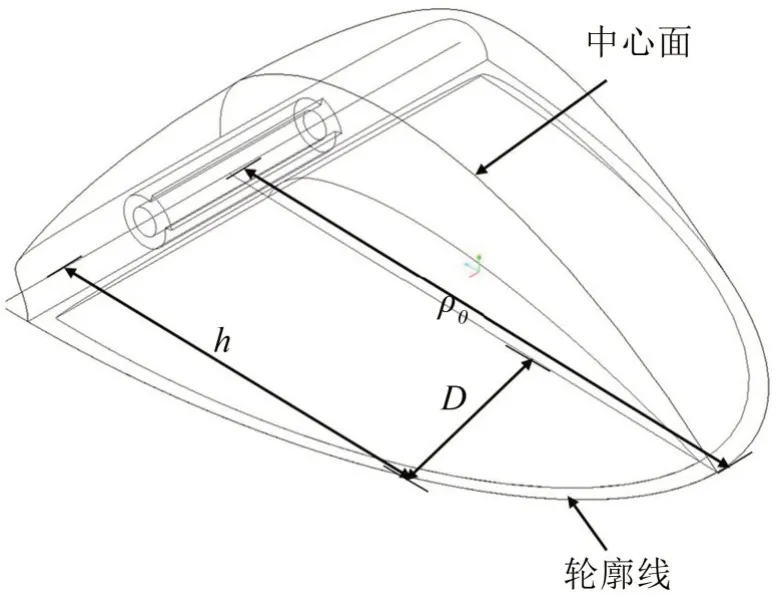
圖5 仿生貝殼模型示意圖
為了使仿生貝殼張開到極限位置與管壁碰撞沖擊均勻分布從而避免其受到沖擊導致部分區域破壞,設計時令其上表面在張開至最大角度時能夠完全貼合圓管內壁,在其底面構造貝殼輪廓邊線,輪廓線與中心面的交點為貝殼最前端的點,即該點到轉軸距離為ρ0,設輪廓線上其他點到中心面距離為D,要使中心面變比例掃描后得到的執行機構能夠在張開最大角度時與圓管內壁貼合,則輪廓線上的點到轉軸處的距離為:

式中:R為圓管內徑,通過描點法可以得到貝殼的輪廓線,這也是本文仿生貝殼的結構不同于真實貝殼的一點,即輪廓線均為橢圓但長軸和短軸位置不同。將中心面上由對數螺線圍成的曲面沿著輪廓邊線向兩側以變比例的方式掃描生成三維殼體,從而使得貝殼表面在轉動一定角度后能夠與圓管內壁貼合,構建的仿生貝殼轉動范圍為-12°到12°。
仿生貝殼形狀確定后,執行機構在圓管內的轉動范圍也確定,首先優化驅動磁力矩。已知永磁體在勻強磁場中受到的磁力矩和其端面與磁場方向的為余弦函數關系,由于執行機構轉動范圍較小,為了便于分析,近似認為與轉動角度的關系曲線為余弦函數圖象的一段,因此要使近似為常數,采用陣列布置永磁體的方式,在仿生貝殼靠近轉軸處到中間部分以不同的初始角度對稱布置永磁體,令兩部分永磁體受到的驅動磁力矩分別隨著轉角增大而逐漸減小和逐漸增大,從而使得在轉動過程中盡量保持為常數且為較大值。
為了實現兩側仿生貝殼同時張開或閉合,兩側永磁體為同極相對布置,因此從在0到12°范圍內為斥力矩,想要使永磁體間磁力矩從中間位置處反向并逐漸增大,令內側永磁體z方向位置靠近甚至越過轉軸位置,使其在運動過程中部分轉到軸線的另一側,根據靜磁力矩數學模型可知,兩側永磁體越過轉軸的部分之間由于距離較短會產生較大的反向磁力矩,從而使得永磁體間從磁力矩在中間位置處反向并增大。
本文通過先構建執行機構三維模型后進行電磁仿真計算,根據計算結果調整模型之后再重新計算直到達到優化目標,此時的執行機構示意圖如圖6所示。其中模型70-65-1、70-65-2為仿生貝殼長度為70 mm時兩種永磁體分布情況,模型70-65-1中內側永磁體布置角度為-24°,外側永磁體水平布置,模型70-65-2則與之相反,模型65-60-1、65-60-2仿生貝殼長度為65 mm,永磁體布置與70-65-1、70-65-2 相同。永磁體和3D 打印的仿生貝殼材料分別為釹鐵硼NdFe35B 和樹脂,密度分別為7 750 kg/m3和1 200 kg/m3,由于執行機構形狀特殊不易直接計算轉動慣量,由Creo軟件直接給出。
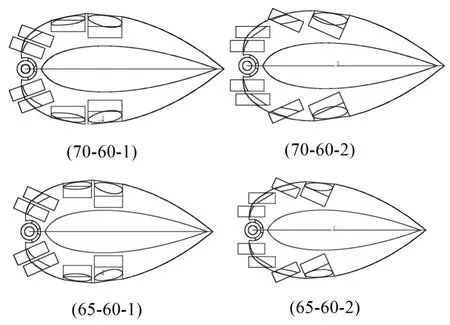
圖6 優化后執行機構模型示意圖
和與轉角之間的關系分別如圖7、圖8 所示,優化后的四個模型與轉角基本為線性關系,且平衡位置位于中間位置,驅動磁力矩基本不隨轉角改變,各角度位置對應的值與平均值誤差不到5%,可以認為驅動器系統彈性系數K和驅動磁力矩在轉動過程中不隨轉角改變,優化后的動力學參數如表2所示。
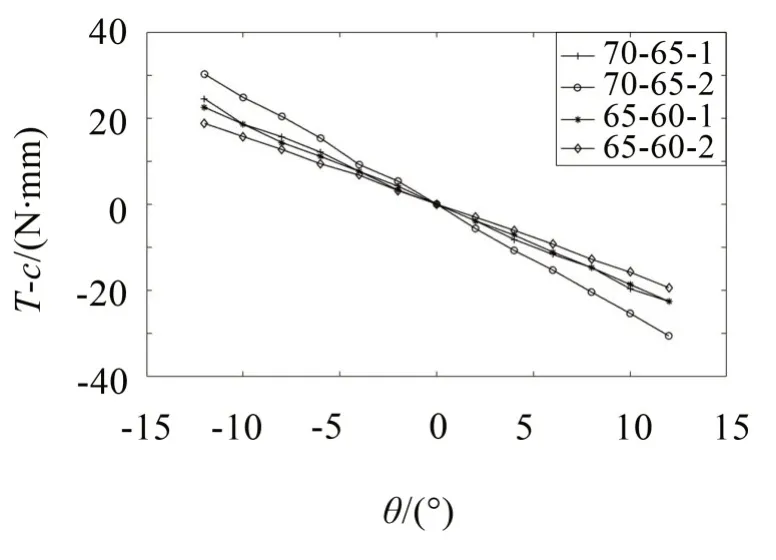
圖7 兩側永磁體之間磁力矩與轉角的關系曲線
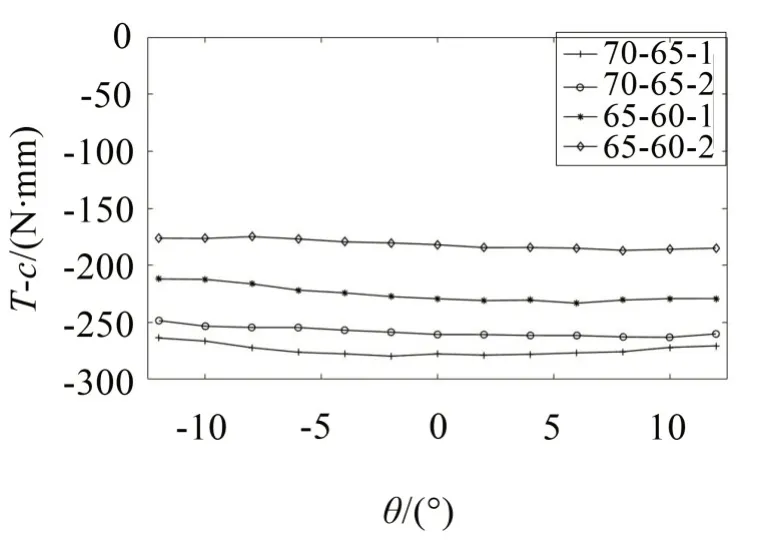
圖8 驅動力磁力矩與轉角的關系曲線
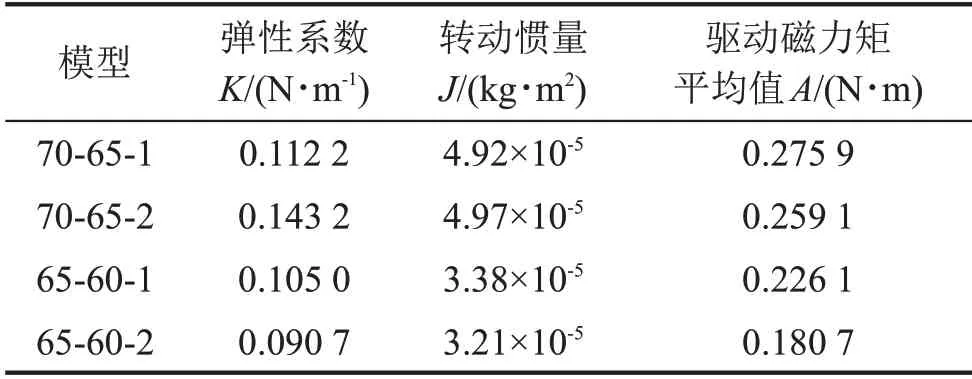
表2 系統動力學參數
3 仿生貝殼驅動器動力響應分析
仿生貝殼驅動器在諧波電流輸入下會呈現周期性張合運動,而執行機構最大轉角和輸入電流的幅值和頻率存在很大關系。已知仿生貝殼驅動器動力學響應問題屬于單自由度振動問題,其動力學方程描述如下:

式中:J為執行機構轉動慣量,C為系統阻尼,K為執行機構綜合剛度(結構剛度和磁性剛度),A為外力矩幅值,ω為驅動力矩變化頻率,θ為執行機構轉動角度。
為了得到執行機構的幅頻響應特性,將其轉動角度表示為:

式中:Y為執行機構的轉角振動幅值。
將上式代入動力學方程中,可得仿生貝殼的轉角振動幅值為:
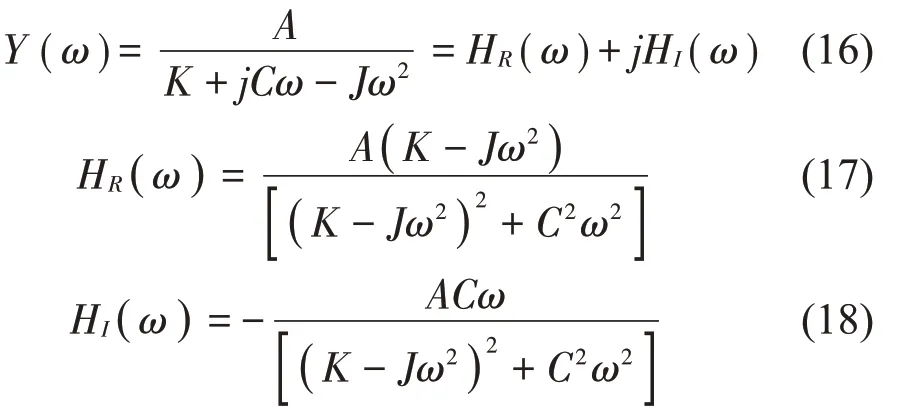
其中:HR為實頻部分,HI為虛頻部分。
在相頻特性中,相角可表示為:

仿生貝殼驅動器的外部激勵是由陣列永磁鐵在通電線圈磁場中受到的磁力矩提供,可以通過調控電流的幅值和頻率來控制仿生貝殼的張合運動。驅動器通過模仿貝殼噴射流體進行驅動,其驅動性能與仿生貝殼轉角振動幅值和振動頻率有關,因此需要研究不同輸入電流下的執行機構幅頻特性,對不同貝殼模型和永磁體布局下的執行機構動力學特性進行評估,從而得到最優的仿生貝殼驅動器設計結構。
本文第二節給出了四個優化后的執行機構模型以及對應的動力學參數,應用該參數進行幅頻特性分析。不同輸入電流下的四個執行機構模型的幅頻響應如圖9所示,系統阻尼C為0.001 N·s/m,由圖可知,在自然條件下不同執行機構的仿生貝殼驅動器均存在一個共振峰,模型70-65-1 的共振峰最大,且共振頻率向左偏移;模型65-60-2的共振峰最小。隨著電流的增大,四種結構形式的仿生貝殼驅動器的共振峰均變大,但共振頻率位置則保持不變。因此,在最優頻率的弱電流激勵下,模型70-65-1對應的仿生貝殼驅動器更容易實現較大的偏轉角,有利于實現小輸入電流下的系統驅動。
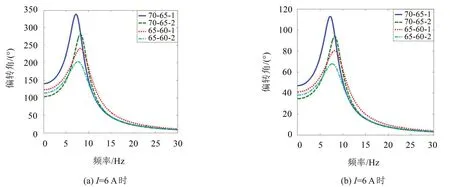
圖9 不同輸入電流下的幅頻響應
由于執行機構在圓管內運動轉動存在轉動范圍限制,其在30度偏轉角限位條件下的四個執行機構的幅頻響應如圖10所示,可以看出存在限位的情況下,四個執行機構均在低頻激勵下達到限定轉角,且幅頻響應差異減小,但隨著頻率的增加,模型65-60-1的最優頻率寬度最大。
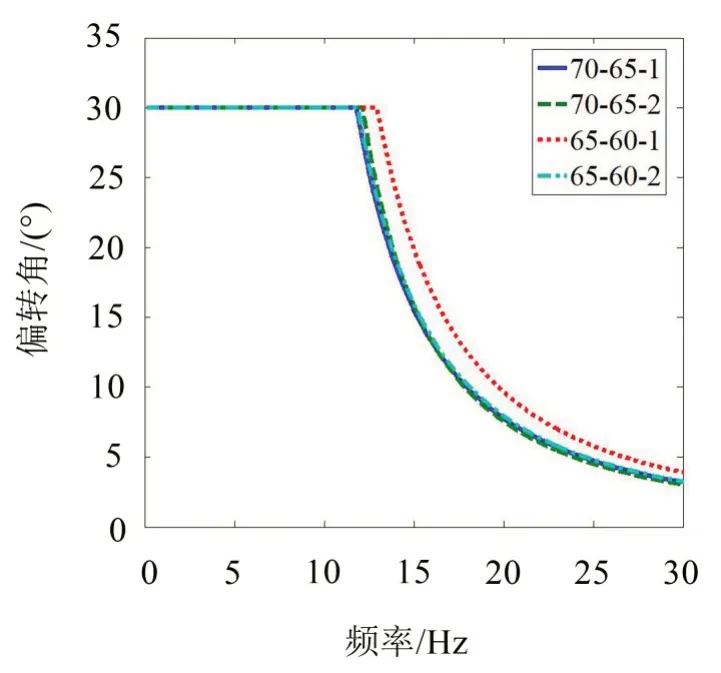
圖10 I=2 A時存在限位條件下的幅頻響應
仿生貝殼動力學響應特性,包括實頻特性、相頻特性和虛頻特性,如圖11所示。由圖11(a)可知,模型70-65-1 的實頻-虛頻圓最大,從圖11(b)可看出,四個執行機構在外部激勵為10 Hz附近時均出現相位跳躍現象,模型70-65-1 結構相位跳躍頻率提前,模型65-60-1相位跳躍頻率滯后。
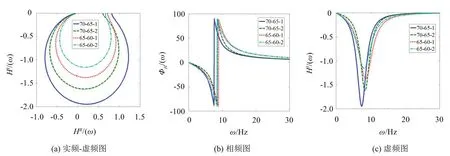
圖11 I=2 A時執行機構動力學響應特性
考慮水的阻尼作用,本文還分析了不同系統阻尼對仿生貝殼驅動器動力學響應的影響,圖12給出了不同系統阻尼下的模型70-65-1的幅頻響應。
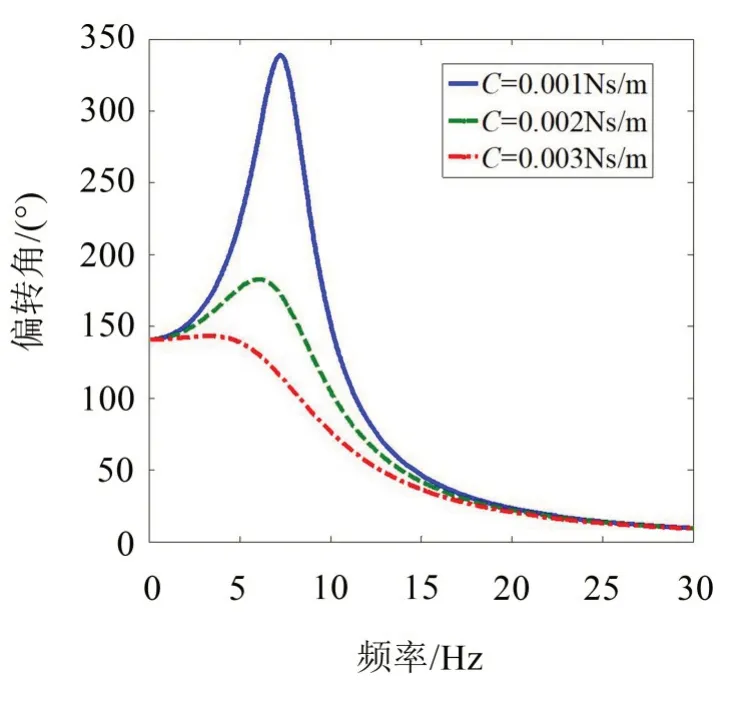
圖12 I=6 A時不同系統阻尼下的模型70-65-1的幅頻響應
由圖可知,隨著阻尼的增加,共振峰出現被削平現象,共振效應減弱,當阻尼為0.003 N·s/m時,則振動幅值出現了短暫的平臺效應,而后隨著頻率的增加迅速衰減。
4 結語
基于電磁感應和雙貝類貝殼的外形結構及噴射運動機制提出了仿生貝殼驅動方案及驅動器結構,建立了驅動器執行機構的一般動力學模型并提取出動力學參數,包括彈性系數K、轉動慣量J和外力矩幅值A,構建了永磁體在通電線圈中受到的磁力矩和永磁體之間的磁力矩的數學模型并通過Ansoft Maxwell 電磁仿真計算永磁體在不同位置及夾角下受到的磁力矩,數值計算與仿真結果誤差不到5%從而驗證了模型的準確性,依據對數螺線極坐標方程并利用Creo 建立了仿生貝殼模型并通過永磁體陣列排布優化了動力學參數,優化后的系統彈性系數K和外力矩幅值均為常數,最后完成了動力學響應計算和分析。根據結果可知,優化后的各仿生貝殼驅動器動力學幅頻響應均存在一個共振峰值,且在外部激勵為10 Hz 附近時均出現相位跳躍現象,當系統阻尼為0.003 N·s/m時,執行機構振動幅值出現短暫平臺效應而后迅速衰減。本文研究結果可為基于仿生貝殼電磁驅動器的流量控制系統和水下航行系統提供動力學分析參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
華人時刊(2020年13期)2020-09-25 08:21:42
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年1期)2016-01-11 16:53:24
