輸電線路內(nèi)懸浮抱桿起升動(dòng)載系數(shù)的研究
2022-10-21 08:15:10夏擁軍孟凡豪孫立江
噪聲與振動(dòng)控制 2022年5期
關(guān)鍵詞:有限元
馬 勇,夏擁軍,孟凡豪,孫立江,安 平,龔 巖
(1.中國(guó)電力科學(xué)研究院有限公司輸變電工程研究所,北京 100055;2.國(guó)網(wǎng)甘肅省電力公司建設(shè)分公司,蘭州 730050)
隨著經(jīng)濟(jì)社會(huì)的發(fā)展,電力行業(yè)在人們的生產(chǎn)生活中發(fā)揮著越來(lái)越重要的作用。2020年我國(guó)成為電力需求量第二大的經(jīng)濟(jì)體,但我國(guó)電力資源地域分布不均勻,往往需要進(jìn)行遠(yuǎn)距離大功率的電力輸送。電力抱桿是一種為了滿足架設(shè)輸電線路需求的格構(gòu)式起重機(jī)械[1-2],其中懸浮式抱桿因其結(jié)構(gòu)簡(jiǎn)單,使用安裝方便得到了廣泛的應(yīng)用[3-5]。相關(guān)學(xué)者對(duì)電力抱桿的動(dòng)態(tài)特性展開(kāi)了研究。葉立運(yùn)等[6]采用計(jì)算機(jī)輔助技術(shù)對(duì)內(nèi)懸浮外拉線抱桿組立1 000 kV 耐張塔進(jìn)行了分析;張謙等[7]基于非線性有限元方法,對(duì)組塔施工內(nèi)懸浮內(nèi)拉線抱桿結(jié)構(gòu)進(jìn)行了仿真計(jì)算分析;徐金城[8]等人利用ANSYS 仿真軟件對(duì)懸浮抱桿的風(fēng)振響應(yīng)進(jìn)行了分析,發(fā)現(xiàn)抱桿中部振幅最大,安裝過(guò)程中應(yīng)對(duì)加強(qiáng)中部標(biāo)準(zhǔn)節(jié)的連接;趙紅波[9]利用回歸分析,研究了風(fēng)載荷對(duì)懸浮抱桿的影響。現(xiàn)有的懸浮抱桿動(dòng)態(tài)特性相關(guān)研究主要集中在風(fēng)載荷的影響,研究形式主要以有限元仿真為主,而懸浮抱桿對(duì)吊件的起升存在沖擊作用,目前尚未研究,導(dǎo)致內(nèi)懸浮抱桿的使用及計(jì)算選型存在一定安全風(fēng)險(xiǎn)。本文對(duì)懸浮抱桿的起升動(dòng)載系數(shù)進(jìn)行研究,首先建立懸浮抱桿的空間結(jié)構(gòu)動(dòng)力學(xué)模型,利用剛度和位移的關(guān)系求解等效剛度,利用動(dòng)能等效的原理求解等效質(zhì)量,之后根據(jù)等效剛度和等效質(zhì)量的求解結(jié)果得到起升動(dòng)載的表達(dá)式,最后通過(guò)ANSYS有限元仿真驗(yàn)證表達(dá)結(jié)果的正確性。
1 研究對(duì)象的選取
抱桿是特高壓及各電壓等級(jí)電網(wǎng)的重要組塔施工裝備之一,針對(duì)不同的載荷需求、不同的施工環(huán)境,可選擇的抱桿有內(nèi)懸浮抱桿、人字抱桿、落地?fù)u臂抱桿與落地平臂抱桿等。其中,內(nèi)懸浮抱桿因結(jié)構(gòu)簡(jiǎn)單、重量輕、運(yùn)輸方便等優(yōu)點(diǎn)被廣泛應(yīng)用。按照拉線形式,內(nèi)懸浮抱桿分為內(nèi)懸浮外拉線抱桿與內(nèi)懸浮內(nèi)拉線抱桿,分別如圖1(a)與圖1(b)所示。內(nèi)懸浮外拉線抱桿是把抱桿的拉線錨固在地面設(shè)置好的地錨上,抱桿的穩(wěn)定性好,安全性高;內(nèi)懸浮內(nèi)拉線抱桿是把抱桿的拉線錨固在已組好的鐵塔主材上,由于鐵塔為桁架結(jié)構(gòu),具有一定的彈性,且內(nèi)拉線方式使得抱桿吊裝工作時(shí)傾斜角度小,對(duì)控制繩的要求高,安全性與穩(wěn)定性較差。因此,內(nèi)懸浮外拉線抱桿更具有普遍性,故選取內(nèi)懸浮外拉線抱桿(簡(jiǎn)稱(chēng)懸浮抱桿)作為研究對(duì)象。
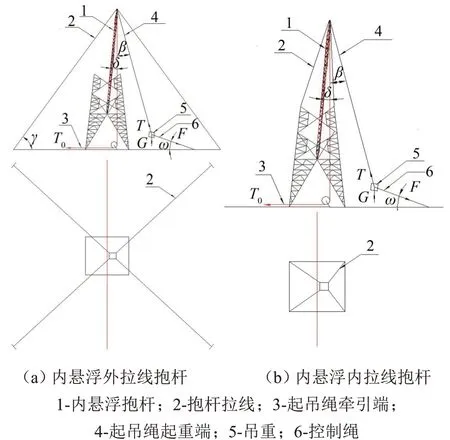
圖1 懸浮抱桿工作示意圖
2 剛度和質(zhì)量的分析
懸浮抱桿未受載時(shí)由抱桿和拉索組成,抱桿的長(zhǎng)度為L(zhǎng),四根拉索在空間中均勻分布,長(zhǎng)度相等,抱桿和拉索與地面之間全部為鉸接。懸浮抱桿受載時(shí),其中兩根拉索放松,結(jié)構(gòu)由另外兩根拉索和抱桿組成,如圖2所示。抱桿與空間z軸的夾角為γ,拉索與xOy平面的夾角為α,兩根拉索之間的夾角為2θ,且拉索平面與xOy平面之間的夾角為β。
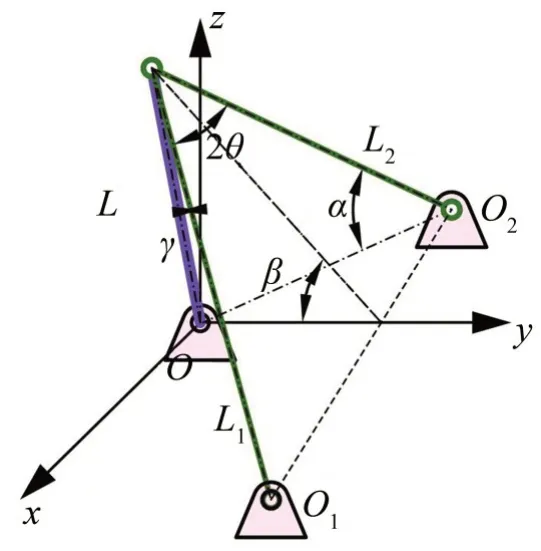
圖2 懸浮抱桿的幾何結(jié)構(gòu)
2.1 剛度的等效
在吊點(diǎn)處施加豎直向下的力F,設(shè)拉索中的張力分別為T(mén)1、T2,抱桿中的軸力為N,懸浮抱桿的受力情況如圖3所示。
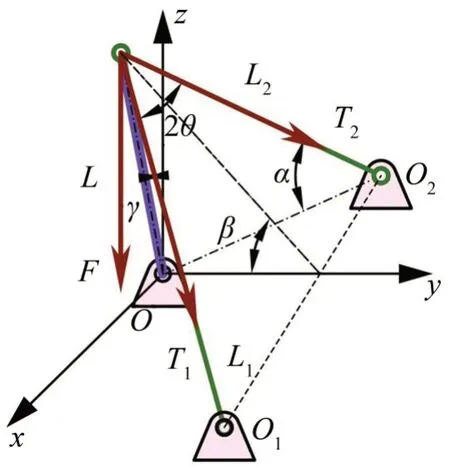
圖3 懸浮抱桿的受力情況
在拉索平面內(nèi)對(duì)拉索的張力進(jìn)行合成,如圖4(a)所示,拉索張力的合力為T(mén)=2T1cosθ。在yOz平面內(nèi)進(jìn)行力的分解,如圖4(b)所示。
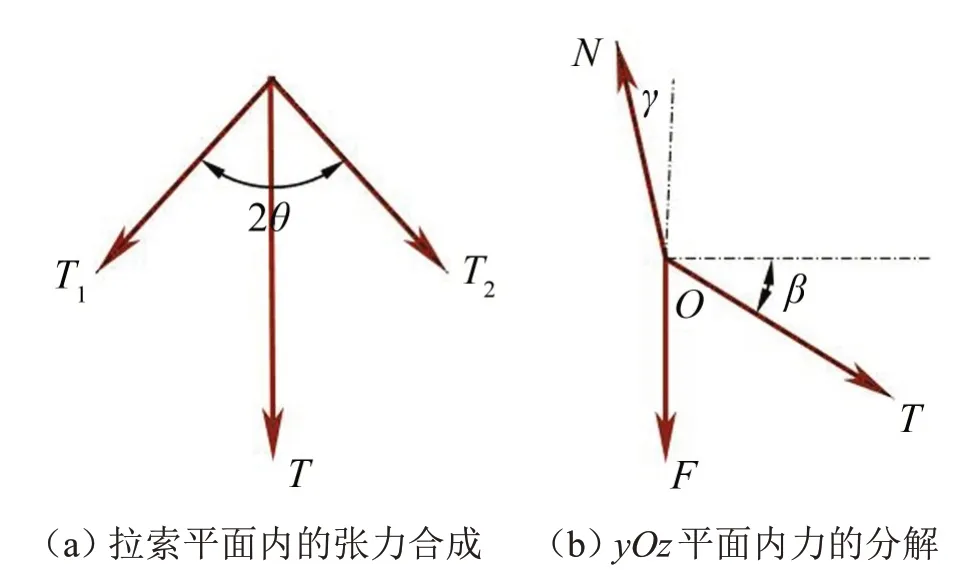
圖4 懸浮抱桿受力分析
根據(jù)力的平衡條件∑F=0,得到懸浮抱桿的靜力學(xué)平衡方程如式(1)所示。

求解方程組,求解結(jié)果如式(2)所示。
設(shè)單側(cè)拉索的橫截面積為A1,彈性模量為E,起重臂的橫截面積為A,彈性模量為E。根據(jù)結(jié)構(gòu)力學(xué)的相關(guān)知識(shí),吊點(diǎn)處受力后的位移如式(3)所示。

代入相關(guān)數(shù)值,得到懸浮抱桿在F作用下吊點(diǎn)處的位移如式(4)所示。
2.2 質(zhì)量的等效
假設(shè)懸浮抱桿受載后結(jié)構(gòu)發(fā)生微小變形,角度變化Δγ,則抱桿與xOy平面的夾角為γ+Δγ。根據(jù)圖2 可知,懸浮抱桿各個(gè)單元體的絕對(duì)位置矩陣分別如式(5)至式(7)所示。
各個(gè)單元體相對(duì)位置與絕對(duì)位置的關(guān)系如式(8)所示。

當(dāng)Δγ→0 時(shí),cosΔγ≈1,sinΔγ=,各個(gè)單元體絕對(duì)位移矩陣與位置矩陣的關(guān)系如式(9)所示。

單元體相對(duì)位移矩陣與絕對(duì)位移矩陣的關(guān)系如式(10)所示。根據(jù)式(5)至式(10),各個(gè)單元體的相對(duì)位移矩陣如式(11)至式(12)所示。
懸浮抱桿等效質(zhì)量如式(13)所示。
懸浮抱桿的吊點(diǎn)位于拉索和起重臂的鉸接點(diǎn),因此等效相對(duì)位移,懸浮抱桿的等效質(zhì)量如式(14)所示。

3 起升動(dòng)載系數(shù)的表達(dá)與驗(yàn)證
3.1 動(dòng)載系數(shù)的表達(dá)
建立懸浮抱桿起升動(dòng)力學(xué)模型,進(jìn)行求解,起升動(dòng)載系數(shù)的表達(dá)式如式(15)所示。
在實(shí)際工程問(wèn)題中,鋼絲繩的剛度和結(jié)構(gòu)位移不易直接求得。設(shè)與載荷相連的鋼絲繩的彈性模量為EQ,長(zhǎng)度為L(zhǎng)Q,單根鋼絲繩的截面積為A0,鋼絲繩的倍率為a,則鋼絲繩的剛度可以表示為,因此,懸浮抱桿的起升動(dòng)載系數(shù)可以用式(16)表示。其中,鋼絲繩的彈性模量可根據(jù)GB/T 24191-2009《鋼絲繩實(shí)際彈性模量測(cè)定方法》測(cè)量得到,對(duì)于重要的鋼絲繩,可要求鋼絲繩生產(chǎn)廠家提供。
3.2 有限元仿真驗(yàn)證
選擇□800型懸浮抱桿進(jìn)行有限元驗(yàn)證。□800型懸浮抱桿長(zhǎng)度為43.4 m,標(biāo)準(zhǔn)節(jié)外徑寬800 mm,主弦采用了∟100×8 角鋼,斜腹桿采用∟56×5 角鋼。拉索鋼絲繩和起升鋼絲繩均選單倍率?15.5 6×19交繞型纖維芯鋼絲繩。初始狀態(tài)拉索與地面之間的夾角α=45°,起升載荷時(shí)抱桿與豎直方向的最大夾角γmax=10°。
由式(4)、式(15)及式(16)可得□800 型懸浮抱桿的等效剛度為2.06×104N/m,等效質(zhì)量為1.53×103kg,起升動(dòng)載系數(shù)的表達(dá)式為?2=1+0.265v0。
利用ANSYS建立懸浮抱桿的有限元模型,在拉索與地面連接處施加全約束,在抱桿根部施加鉸接約束,在吊點(diǎn)處施加靜載10 kN,懸浮抱桿的位移如圖5所示,□800型懸浮抱桿的靜位移為0.028 9 m。
圖5 50 kN靜態(tài)載荷下懸浮抱桿的位移情況
對(duì)懸浮抱桿分別施加不同的外力,使其以不同的起升速度進(jìn)行起升,使用ANSYS進(jìn)行瞬態(tài)動(dòng)力學(xué)分析,吊點(diǎn)處位移隨時(shí)間的變化如圖6所示。
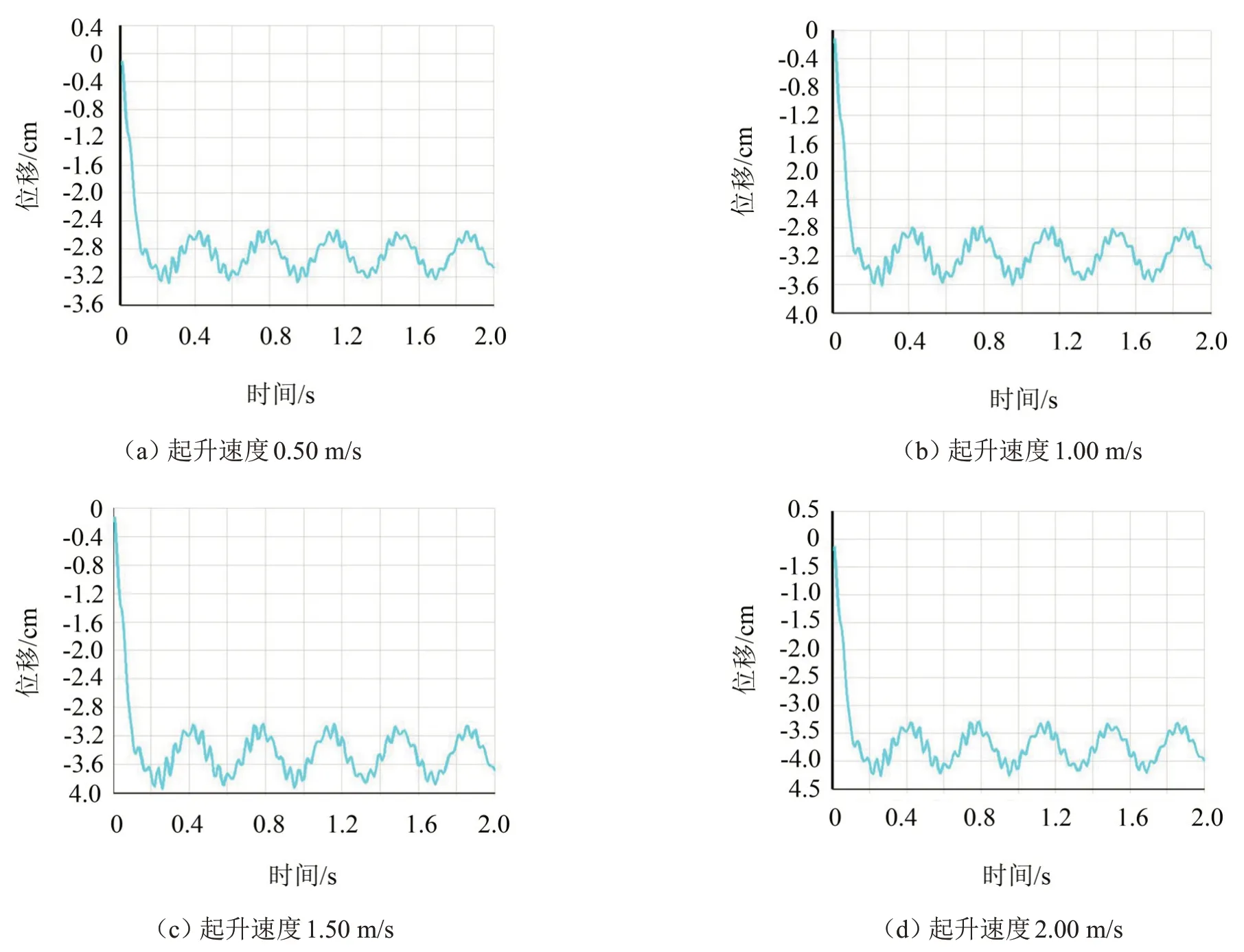
圖6 不同起升速度吊點(diǎn)位移隨時(shí)間變化
將不同起升速度下吊點(diǎn)最大位移的有限元仿真結(jié)果進(jìn)行整理,如表1所示;將理論值與仿真值進(jìn)行比較,如圖7所示。
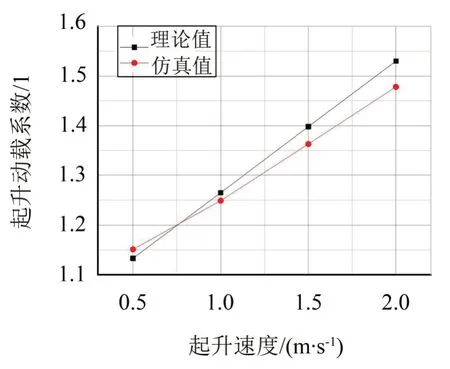
圖7 起升動(dòng)載系數(shù)理論值與仿真值比較
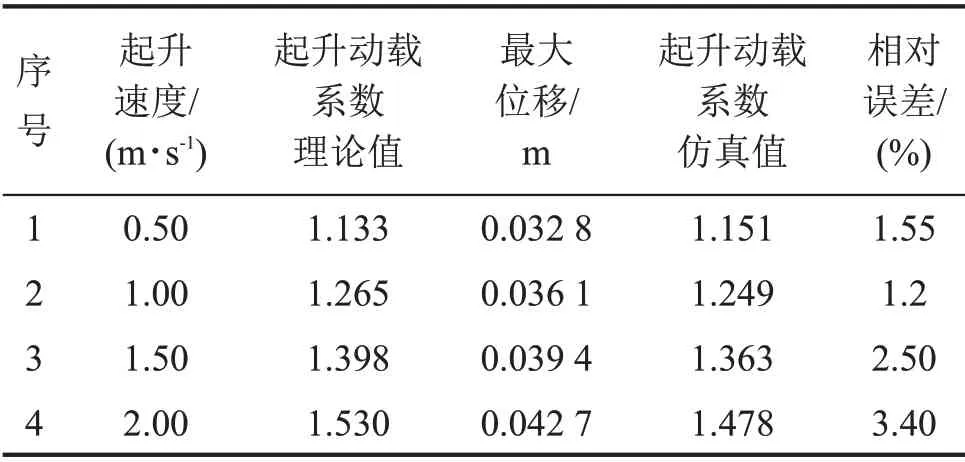
表1 不同起升速度起升動(dòng)載系數(shù)仿真結(jié)果
由有限元仿真結(jié)果可知,對(duì)于□800 型懸浮抱桿,起升動(dòng)載系數(shù)的理論值與仿真值誤差很小,起升動(dòng)載的表達(dá)式能夠很好地反映其起升動(dòng)載特性。
4 結(jié)語(yǔ)
本文對(duì)懸浮抱桿的起升動(dòng)載系數(shù)進(jìn)行了研究。懸浮抱桿的質(zhì)量和剛度是影響懸浮抱桿起升動(dòng)載系數(shù)的決定性因素。本文建立了懸浮抱桿的模型,對(duì)懸浮抱桿的結(jié)構(gòu)進(jìn)行分析,利用結(jié)構(gòu)變形與剛度的關(guān)系求解了懸浮抱桿的等效剛度,分別求解出各個(gè)單元體的位置矩陣和位移矩陣,利用動(dòng)能等效的原理求解出懸浮抱桿的等效質(zhì)量。對(duì)起升動(dòng)力學(xué)模型進(jìn)行求解,得到起升動(dòng)載系數(shù)的表達(dá)式,并對(duì)表達(dá)式進(jìn)行優(yōu)化,得到更有利于工程應(yīng)用的形式。
隨后應(yīng)用有限元軟件ANSYS 對(duì)懸浮抱桿的起升過(guò)程進(jìn)行仿真,建立了□800型懸浮抱桿的模型,分別以0.50 m/s、1.00 m/s、1.50 m/s 和2.00 m/s 的速度進(jìn)行起升,求解其最大動(dòng)位移,獲得不同起升速度的起升動(dòng)載系數(shù)。將仿真值與理論值進(jìn)行比較,發(fā)現(xiàn)二者誤差很小,由此證明懸浮抱桿的起升動(dòng)載系數(shù)的表達(dá)式能夠很好地反映其起升動(dòng)態(tài)特性,為今后懸浮抱桿的設(shè)計(jì)計(jì)算提供了一定的參考。
猜你喜歡
艦船科學(xué)技術(shù)(2022年20期)2022-11-28 08:19:18
數(shù)學(xué)物理學(xué)報(bào)(2022年4期)2022-08-22 04:09:28
減速頂與調(diào)速技術(shù)(2020年4期)2020-11-22 07:20:26
上海節(jié)能(2020年3期)2020-04-13 13:16:16
石油化工建設(shè)(2019年6期)2020-01-16 08:03:42
天津醫(yī)科大學(xué)學(xué)報(bào)(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(shù)(2016年3期)2016-06-05 09:36:08
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開(kāi)發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
