改進TCPN變工況軸承故障診斷方法
2022-10-21 08:15:34胡春生李國利閆小鵬魏紅星
噪聲與振動控制 2022年5期
胡春生,李國利,馬 良,閆小鵬,魏紅星
(寧夏大學機械工程學院,銀川 750021)
滾動軸承是旋轉(zhuǎn)機械傳動裝置最重要的部件之一[1],軸承的健康狀態(tài)直接影響著旋轉(zhuǎn)機械能否安全穩(wěn)定地工作。由于軸承長時間高速旋轉(zhuǎn),常常伴隨著磨損、高溫等嚴苛的工作條件,因此故障頻發(fā)[2]。軸承一旦發(fā)生故障,輕則停機整修,重則危及生命,給生產(chǎn)生活帶來巨大隱患,因此實時監(jiān)控軸承運轉(zhuǎn)狀態(tài)并對故障進行在線診斷具有重要意義。
當前軸承故障診斷方法主要分為兩種,一種是以信號分析為主的傳統(tǒng)故障診斷方式,如經(jīng)驗模態(tài)分解(EMD)[3]、集合經(jīng)驗模態(tài)分解(EEMD)[4]和奇異值分解(SVD)[5]等,這種方法依靠人工提取特征值,因此故障診斷效果過于依賴專家經(jīng)驗;另一種是以數(shù)據(jù)驅(qū)動為主的機器學習方法,如循環(huán)神經(jīng)網(wǎng)絡(RNN,包括LSTM 和GRU)[6-7],Logistic 回歸[8]、支持向量機(SVM)[9],人工神經(jīng)網(wǎng)絡(ANN)[10]和卷積神經(jīng)網(wǎng)絡(CNN)[11]等,這種方法無需人工參與,可自動提取信號特征,且準確率大大提高,因此被廣泛應用于故障診斷領(lǐng)域,但是在實際工程中,上述方法的準確率大幅度降低,究其原因,該研究均假設工況恒定不變,即訓練集與測試集具有相同的分布。然而旋轉(zhuǎn)機械在運行過程中,轉(zhuǎn)速與負載等時刻發(fā)生變化,不同工況下數(shù)據(jù)分布存在差異,因此對變工況滾動軸承故障診斷的研究具有重大實際應用意義。
當轉(zhuǎn)速和負荷都發(fā)生變化時,滾動軸承振動信號有以下四個特點:幅值變、脈動沖擊間隔、采樣相位不恒定和信號噪聲污染[12]。因此,變工況軸承故障診斷的主要任務是找到不同工況間不變的特征。目前,針對變工況軸承的故障診斷主要分為兩種,一種方法為對振動信號進行重采樣,另一種方法通過優(yōu)化神經(jīng)網(wǎng)絡結(jié)構(gòu),提取不同工況間的相同特征。
重采樣方法將軸承振動信號這種復雜的非平穩(wěn)信號根據(jù)不同轉(zhuǎn)速進行階次跟蹤,重新采樣為平穩(wěn)信號。與按恒定時間間隔的采樣方法不同,階次跟蹤是對振動信號按恒定角度間隔進行重采樣,從而避免因轉(zhuǎn)速的變化而導致采集的數(shù)據(jù)分布不同。文獻[13]利用階次跟蹤算法對速度進行歸一化,從而解決變轉(zhuǎn)速問題。文獻[14]基于階次分析技術(shù),對頻譜峰比外(SPRO)、頻譜峰比內(nèi)(SPRⅠ)和峰比滾動元素(SPRR)三個頻域特征進行修正,再將修正后的特征使用支持向量機分類。盡管階次跟蹤算法可以在一定程度上解決變轉(zhuǎn)速問題,但是該方法的精度并不高,而且階次跟蹤往往需要專業(yè)的硬件或者復雜的軟件,這種硬件十分昂貴,而依靠軟件的階次跟蹤則十分依賴于插值,在某些工程中,速度信息更是無法獲取,因此依靠重采樣方法對變工況軸承故障進行診斷在實際工程中應用十分有限。
變工況軸承故障診斷的另一種方法為通過優(yōu)化傳統(tǒng)模型的網(wǎng)絡結(jié)構(gòu)來提取變工況振動信號中相同的特征。在卷積神經(jīng)網(wǎng)絡中,最大池化只取區(qū)域內(nèi)神經(jīng)元活性的最大值,而平均池化會分配相同的權(quán)重給區(qū)域內(nèi)的神經(jīng)元,因此會模糊重要特征。文獻[15]提出一種新的數(shù)據(jù)池化方法。該方法用步長為2,激活函數(shù)為Rectified Linear Unit(ReLU)的小尺度卷積層代替?zhèn)鹘y(tǒng)的池化層,既可以使輸出圖像的尺寸變成輸入的一半,實現(xiàn)降采樣的功能,又能讓小尺度卷積核在訓練中自動調(diào)整權(quán)重挑選有效的特征。實驗結(jié)果表明提出的方法可有效地提高神經(jīng)元激活比例并增加神經(jīng)元活性值的多樣性。文獻[16]基于Ⅰnception 模塊思想,采用三個3×3 的小卷積層串聯(lián)和堆疊來代替7×7 的大卷積核,從而學習更精確的特征。
以上方法通過優(yōu)化池化層和卷積核來挖掘信號中的深層特征,但是這些方法僅挖掘信號的局部特征,未涉及故障樣本的全局特征,而且容易受到噪聲污染。為挖掘樣本時間序列的全局特征,本文提出一種基于短時傅里葉變換的時域卷積池化神經(jīng)網(wǎng)絡(TCPN)故障診斷模型。首先,將不同負載下的軸承振動信號進行短時傅里葉變換,得到信號二維時頻矩陣,將二維矩陣轉(zhuǎn)化為一維時頻序列,從而挖掘信號在時域及頻域上的特征;其次,引入因果卷積和膨脹卷積,使模型在特征提取時可以獲取輸入層的完整歷史信息,挖掘樣本全局特征。再次,為模糊不同工況下相同故障的分布差異,對殘差塊進行結(jié)構(gòu)優(yōu)化,使用小卷積核提取局部特征,以拼接的方式與膨脹卷積進行特征融合,兼顧軸承振動信號中的全局特征與局部特征;最后,針對一個周期內(nèi)樣本數(shù)據(jù)巨大且不同工況下樣本分布存在差異等問題,對數(shù)據(jù)樣本進行降采樣,從而簡化訓練樣本,進而降低訓練耗時。
1 傳統(tǒng)時域卷積神經(jīng)網(wǎng)絡
傳統(tǒng)時域卷積神經(jīng)網(wǎng)絡(TCN)由具有相同輸入和輸出長度的擴張的、因果的一維卷積層組成,其本質(zhì)為一維卷積神經(jīng)網(wǎng)絡,但是其在一維卷積層的基礎上添加了因果卷積、膨脹卷積和殘差鏈接。與傳統(tǒng)一維卷積神經(jīng)網(wǎng)絡不同的是,由于膨脹概念的引入,使得相同卷積層數(shù)的條件下,TCN具有更大的感受野。
因果卷積:“t”時刻的輸出值只依賴于上層網(wǎng)絡中“t”時刻及之前的輸入,使得之前的數(shù)據(jù)可以更好地融入到未來的數(shù)據(jù)中,是一種嚴格的時間約束模型。
膨脹卷積:當卷積神經(jīng)網(wǎng)絡的“kernel_size”為k時,n層卷積層的接受野r如公式(1)所示:

若滿足接受野為序列的整體輸入長度,即l(input_length)時,所需的最小層數(shù)如公式(2)所示:

此時的網(wǎng)絡層數(shù)將非常巨大,導致參數(shù)量巨大,從而需要更長時間訓練。因此,TCN引入膨脹概念,如圖1 所示。與一維卷積不同的是,膨脹卷積可以一次跳過d個輸入寬度,從而可以獲得更大的感受野。給定一個基數(shù)“b”,其計算方式如公式(3)所示:
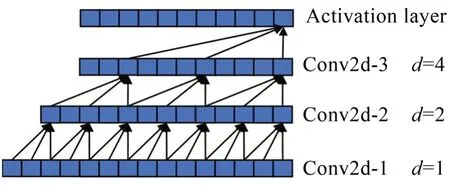
圖1 TCN原理圖

(i為當前卷積層數(shù)值)計算當前層數(shù)的膨脹d。引入膨脹卷積后,在輸入長度為l時所需層數(shù)如公式(4)所示:

殘差連接[17]:時域卷積神經(jīng)網(wǎng)絡用一個殘差塊來代替一層的卷積。殘差網(wǎng)絡內(nèi)部的殘差塊采用跨層連接,使得信息可以跨層傳輸,殘差塊內(nèi)部使用“Dropout”來防止過擬合問題,同時還能有效緩解梯度消失問題。
2 改進的時域卷積神經(jīng)網(wǎng)絡故障診斷方法
2.1 改進的膨脹卷積
傳統(tǒng)膨脹卷積僅由卷積層構(gòu)成,當膨脹系數(shù)大于卷積核尺寸時,感受野會出現(xiàn)空洞,因此對于軸承振動信號等高維輸入,膨脹卷積仍然有較深的網(wǎng)絡結(jié)構(gòu),較深的網(wǎng)絡結(jié)構(gòu)難以訓練,并且訓練耗時巨大。同時,較深的網(wǎng)絡結(jié)構(gòu)雖然可以挖掘出軸承振動信號中的更深層特征,但是當軸承運行工況發(fā)生變化時,全卷積層的網(wǎng)絡結(jié)構(gòu)會發(fā)生嚴重的過擬合現(xiàn)象。針對以上不足,本文改進膨脹卷積的網(wǎng)絡結(jié)構(gòu),在卷積層后添加池化層,其網(wǎng)絡結(jié)構(gòu)如圖2所示。
由圖2 可知,相鄰兩個卷積層之間增加的感受野由公式(5)計算:
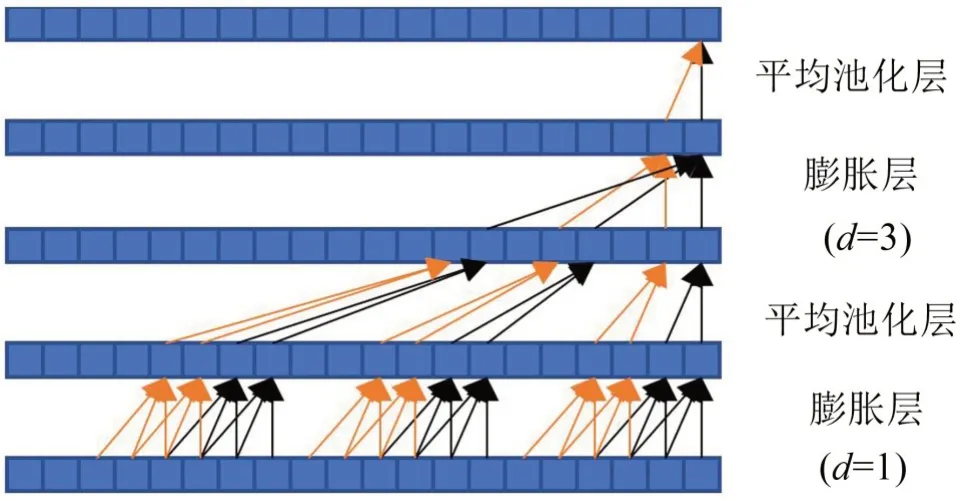
圖2 改進的膨脹卷積結(jié)構(gòu)示意圖

Δl:相鄰兩卷積層間感受野之差;
k:卷積核大小;
b:膨脹系數(shù);
n:網(wǎng)絡層數(shù)
池化后,感受野增加一倍,其感受野計算方法如公式(6)所示:

增加池化層后,在網(wǎng)絡層數(shù)相同的條件下,改進的膨脹卷積的感受野約為傳統(tǒng)膨脹卷積的2n倍。因此大大降低了模型的復雜程度,減小模型參數(shù)量,同時可以有效解決因模型參數(shù)量過大導致的難以訓練等問題。
2.2 改進的殘差塊與特征融合
在變負載與變速條件下,滾動軸承會出現(xiàn)幅值變、脈動沖擊間隔、采樣相位不恒定和信號噪聲污染等問題,導致不同工況下同種故障類型的振動信號存在差異,同時,對于軸承振動信號這種復雜的高維數(shù)據(jù),傳統(tǒng)殘差塊采用跳躍連接的方式,使用小卷積核提取局部特征后與卷積層以簡單相加的方式進行特征融合,會出現(xiàn)大量冗余特征,導致故障診斷準確率下降。為挖掘變工況條件下相同故障的共同特征,同時縮減差異,降低數(shù)據(jù)維度,從而降低訓練時間,本文對傳統(tǒng)殘差塊進行改進,其網(wǎng)絡結(jié)構(gòu)如圖3(a)所示。
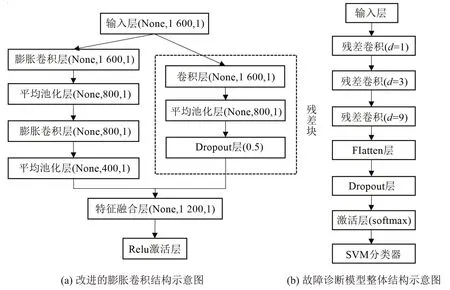
圖3 TCPN殘差卷積神經(jīng)網(wǎng)絡
改進后的殘差卷積由膨脹卷積層和殘差塊兩部分組成,其中特征提取層由兩層卷積神經(jīng)網(wǎng)絡和兩層平均池化層組成,殘差塊由卷積層、平均池化層和Dropout 層組成。膨脹卷積層用于挖掘軸承振動信息包括時序信息的全局特征,當膨脹卷積的感受野為樣本整段序列時,膨脹卷積的網(wǎng)絡依舊很深。殘差塊將原始輸入進行卷積運算后,再進行平均池化,從而模糊信號的細節(jié)特征,并且與膨脹卷積提取的特征以拼接的方式進行特征融合,既保留了原始振動信號的淺層特征,又包含深度學習挖掘出的深層特征,同時可避免因特征簡單相加而造成的信息丟失,從而增強模型的魯棒性,以適用于變工況條件下軸承故障診斷。
2.3 構(gòu)建故障診斷模型
針對滾動軸承在實際工作環(huán)境因工況發(fā)生變化和含有環(huán)境噪聲等問題而導致故障診斷準確率低以及魯棒性較差等問題,提出一種改進時域卷積池化神經(jīng)網(wǎng)絡故障診斷方法。其診斷模型結(jié)構(gòu)如圖3(b)所示。首先,使用短時傅里葉變換,將一維振動信號轉(zhuǎn)化為二維時頻矩陣,再將二維時頻矩陣平鋪為一維時頻序列,作為模型輸入;然后,經(jīng)過膨脹系數(shù)分別為1、3、9的三個帶殘差塊的膨脹卷積層進行特征提取,卷積核大小分別為5、10、15。膨脹卷積與殘差塊均使用平均池化,殘差塊的Dropout 參數(shù)設置為0.5。最后獲取“softmax”層輸出后使用支持向量機作為分類器對樣本進行分類。
3 測試實驗
3.1 數(shù)據(jù)來源
為保證實驗結(jié)果真實可靠,實驗數(shù)據(jù)取自美國凱斯西儲大學軸承公開數(shù)據(jù)集,實驗軸承為SKF6203-2RS 滾動軸承[18-21]。數(shù)據(jù)分為正常狀態(tài)、滾動體故障、內(nèi)圈故障和外圈故障四類。其中每種故障由電火花在軸承不同位置點蝕而成,深度為0.28 mm,點蝕直徑分為三種,分別為0.18 mm、0.36 mm、0.53 mm 共10 個類別,即9 種故障狀態(tài)一種正常運轉(zhuǎn)狀態(tài)。該振動信號通過記錄器采集,采樣頻率選用48 kHz,轉(zhuǎn)速為1 730 r/min[22-23]。軸承轉(zhuǎn)動一周的樣本點個數(shù)計算方法如公式(7)所示:

本實驗采用軸承轉(zhuǎn)動一周的數(shù)據(jù)點為一個樣本,即一個樣本包含1 600個數(shù)據(jù)點。本次實驗采用滑窗取樣法,為避免樣本之間存在重疊,本實驗滑動步長設置為1 600。不同故障類別樣本噪聲圖像如圖4所示。
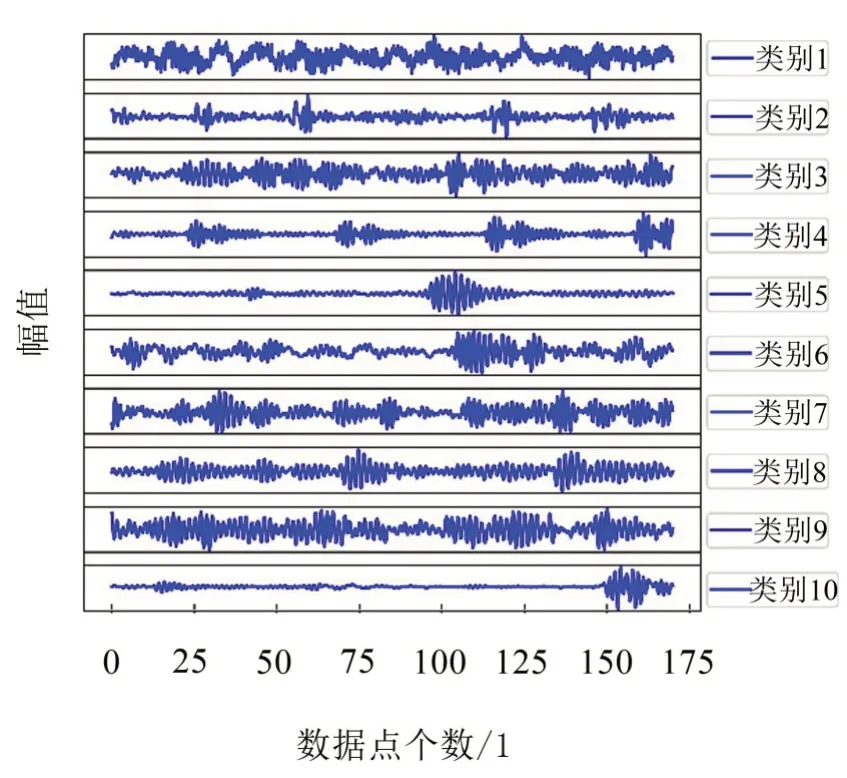
圖4 不同類別承噪聲信號圖
3.2 數(shù)據(jù)預處理
軸承振動信號是一種復雜的非平穩(wěn)時間序列[24-25],若直接將振動信號作為模型輸入則會丟失很多信息,為了盡量挖掘信號中隱含的深層特征,采用短時傅里葉變換,將一維時域信號轉(zhuǎn)化為二維時頻數(shù)據(jù)(矩陣非圖像),再將其展開為一維時頻信號,由于“relu”激活函數(shù)無法激活負值,因此對短時傅里葉變換后的一維時頻序列取絕對值。原始軸承噪聲信號與經(jīng)過短時傅里葉變換后的圖像如圖5所示。
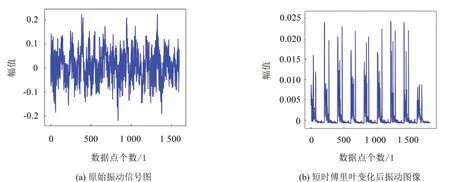
圖5 傅里葉變換前后對比
3.3 不同工況下的數(shù)據(jù)集
傳統(tǒng)故障診斷方法主要被應用于樣本充足,并且樣本分布差異較小的場景。但軸承工作環(huán)境復雜,條件多變,軸承在工作時負載并不會恒定不變,而是隨工作條件時刻發(fā)生變化,尤其在數(shù)據(jù)不足或者某些極端情況下,傳統(tǒng)模型故障分類準確率低,泛化能力差,因此在變負載條件下對軸承進行故障診斷具有重要意義。為探究不同負載對模型分類的影響,本實驗共劃分A、B、C及ABC 四個數(shù)據(jù)集,各個數(shù)據(jù)集樣本信息如表1 所示。其中A、B、C 三個數(shù)據(jù)集的負載分別對應為1 HP、2 HP、3 HP,每個數(shù)據(jù)集中包含10 種故障類別,每個類別200 個樣本,共2 000 個樣本。數(shù)據(jù)集ABC 為數(shù)據(jù)集A、B、C 的集合,包含三種負載,每個類別600 個樣本,共6 000 個樣本。為驗證在數(shù)據(jù)量不足以及出現(xiàn)未知負載情況下模型的故障分類性能,在實驗AB-C中,A、B兩個數(shù)據(jù)集做訓練,C數(shù)據(jù)集做測試,其中C數(shù)據(jù)集代表未知負載的數(shù)據(jù)。
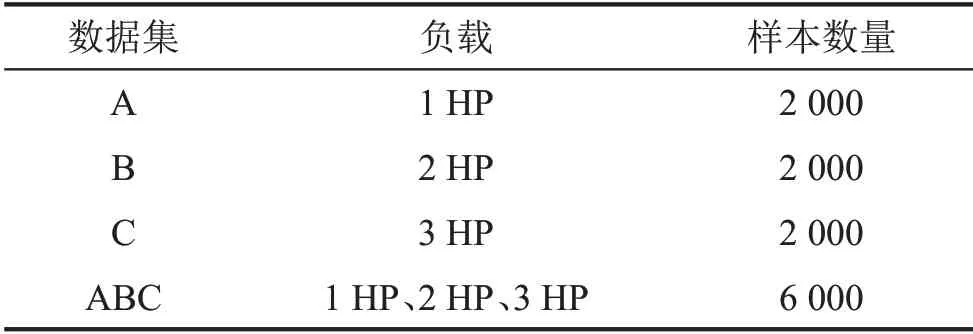
表1 數(shù)據(jù)集說明
4 實驗結(jié)果分析
4.1 軸承故障分類實驗
本實驗采用9:1的比例劃分訓練集與驗證集,在數(shù)據(jù)集ABC中,隨機選取2 000個樣本作為測試集。所有實驗優(yōu)化器均選擇“Adam”,訓練時的“Batch_size”設置為100,迭代次數(shù)為100。本實驗采用衰減學習率的方法線性調(diào)節(jié)學習率,學習率最大值設置為0.01,最小值設置為0.000 01,衰減系數(shù)設置為0.5,以此來獲得更好的收斂速度。超參數(shù)設置如表2所示。
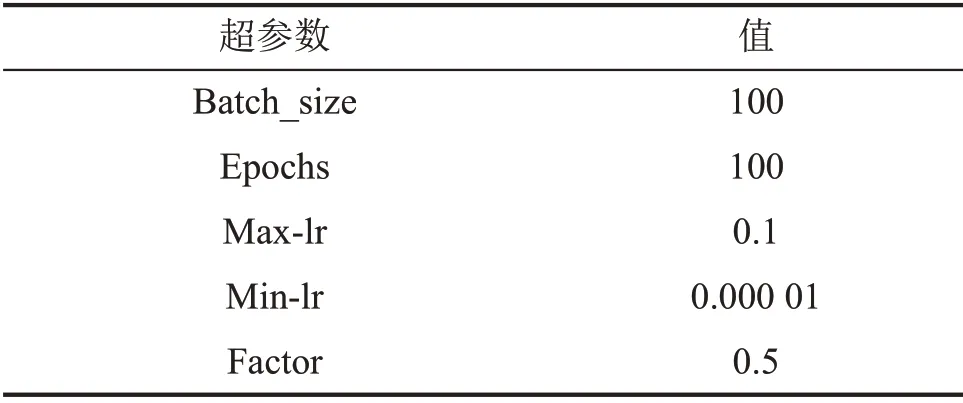
表2 超參數(shù)設置
在訓練開始時,損失函數(shù)較大,因此大的學習率不僅可以使模型快速收斂,還有利于跳出局部最優(yōu)解;當訓練后期,模型接近于收斂時,學習率較大會使模型在全局最優(yōu)處震蕩,因此小的學習率會使模型更接近于全部最優(yōu)解。
為驗證提出模型的故障分類性能,將所提出的方法與CNN、DNN、TCN以及文獻[26]所提出的FDCCN模型實驗結(jié)果進行對比,實驗結(jié)果如表3所示。
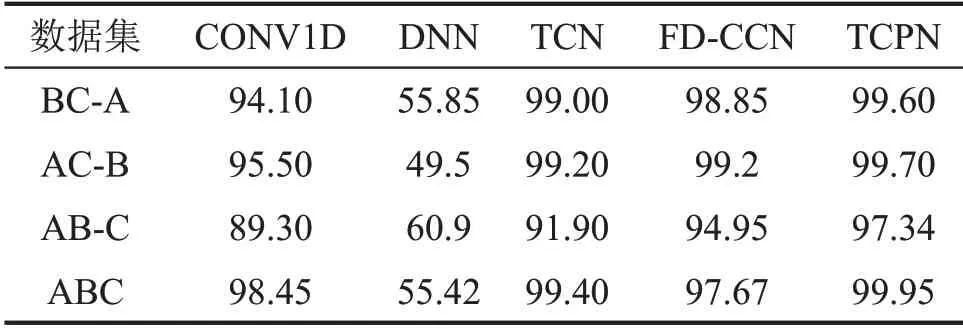
表3 各模型在不同數(shù)據(jù)集下的準確率/(%)
由表3可知,傳統(tǒng)CNN與DNN在變工況條件下無法準確挖掘故障特征,因此分類準確率較低。由于傳統(tǒng)TCN具有更大的感受野,其準確率略高于文獻[26]所提出的方法,除實驗AB-C 外,均在99%以上。本文提出的TCPN模型在其他三個實驗中準確率提升0.5%左右,在實驗AB-C 中提升3%到5%,在混合實驗中,準確率接近100%。不僅如此,文獻[26]提出的方法需要10 000 次的迭代次數(shù),傳統(tǒng)CNN 模型僅需要100 次迭代即可收斂,而由圖6(a)可知,本文提出的PTCN模型收斂速度更快,迭代約40代即可完全收斂,由此可以證明本文提出方法的可行性。
各模型訓練耗時如圖6(b)所示。不足的是,相較于一維卷積神經(jīng)網(wǎng)絡,傳統(tǒng)TCN雖然故障診斷準確率提升了1 %~5 %,但是訓練耗時卻高達240 μs/step,約為CNN 的2 倍。雖然本文提出的TCPN模型準確率在傳統(tǒng)TCN的基礎上有所提升,訓練耗時降低約30%,但是對比CNN,訓練耗時仍然高出40%。分析其原因在于TCN 模型中巨大的感受野雖然挖掘了全局特征,提升了準確率,但是也增加了模型的復雜程度,盡管TCPN優(yōu)化了模型結(jié)構(gòu),減少了參數(shù)量,但是在全局特征與局部特征拼接的過程中,故障特征維度依舊高于傳統(tǒng)方法。
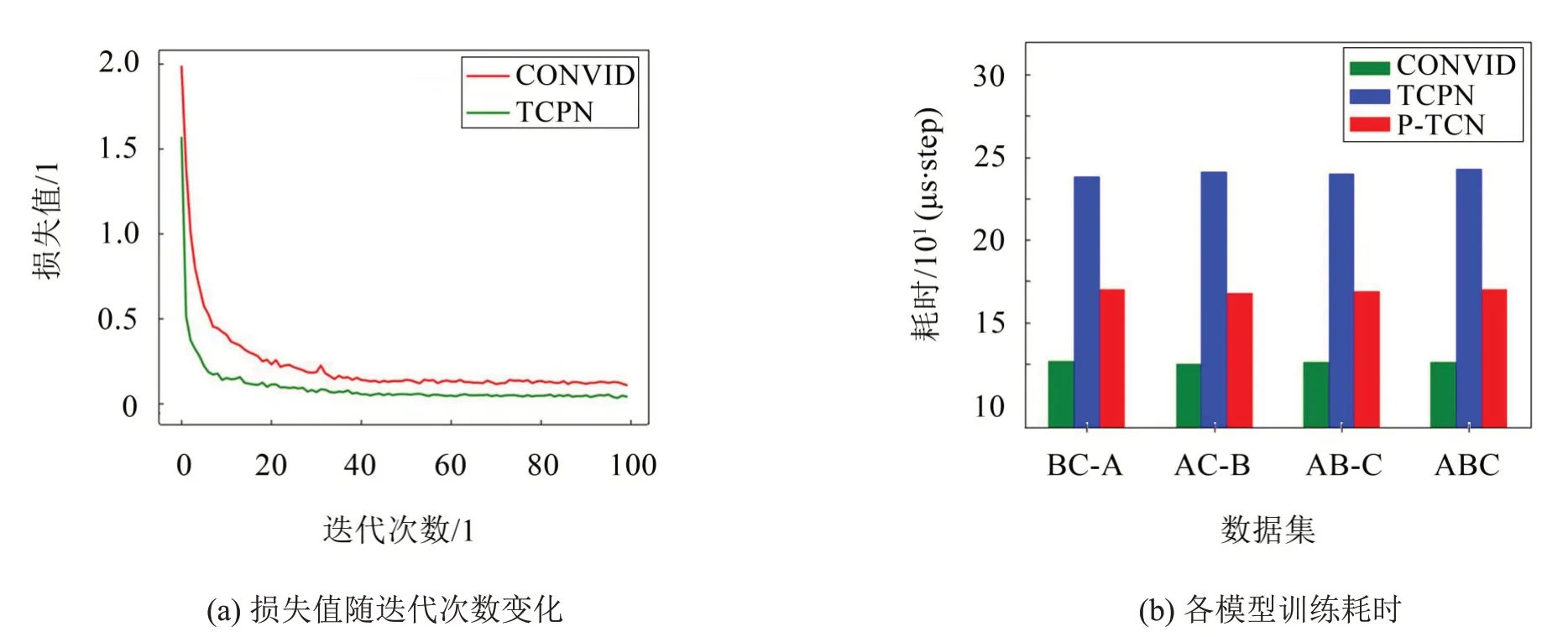
圖6 軸承故障分類實驗結(jié)果
4.2 樣本縮減實驗
文獻[27]認為變工況條件下軸承振動信號中存在大量不相關(guān)、冗余的特征,為進一步去除數(shù)據(jù)分布差異,降低輸入特征維度,降低模型訓練耗時本文對樣本進行數(shù)據(jù)簡化,即仍然采用軸承轉(zhuǎn)動一周的振動信號為一個樣本,并對樣本數(shù)據(jù)進行降采樣,不同采樣頻率降采樣后的振動信號如圖7(a)所示。
由圖可知,降采樣后,樣本丟失了大量細節(jié)信息,但軸承轉(zhuǎn)動一個周期內(nèi)的噪聲趨勢不變。為探究降采樣步長對故障診斷準確率的影響,本文對實驗樣本進行均勻采樣,降采樣后不同實驗的準確率、耗時變化如表4、圖7(b)所示:

表4 不同降采樣步長在各數(shù)據(jù)集的準確率/(%)
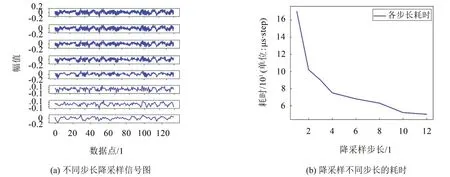
圖7 降采樣實驗結(jié)果圖
由實驗結(jié)果可知,原始軸承振動信號存在大量不相關(guān)的冗余特征,當降采樣頻率小于4時,該振動信號既保留了故障特征,又忽略了軸承轉(zhuǎn)速及負載變化而導致的數(shù)據(jù)集間的分布差異,因此準確率有所提升,同時,由于降采樣后,樣本的數(shù)據(jù)點減少,因此每個“steps”的訓練耗時逐漸降低,當采樣頻率為2時,模型所需要的訓練時間就低于傳統(tǒng)一維卷積神經(jīng)網(wǎng)絡;當降采樣頻率大于4時,雖然樣本的數(shù)據(jù)點更少,噪聲更少,但是信號的特征也被過濾,因此雖然訓練耗時大大減少,但是準確率也相應降低。
綜上,降采樣實驗步長為3時,本文提出的模型在不同數(shù)據(jù)集的準確率均高于文獻[26]所提出的模型以及CNN模型,準確率提升約1%~4%左右,訓練耗時較CNN模型降低30%。
5 結(jié)語
5.1 實驗結(jié)論
提出的時域卷積池化神經(jīng)網(wǎng)絡模型(TCPN)對不同數(shù)據(jù)集進行實驗,實驗結(jié)果表明:
(1)利用膨脹卷積巨大的感受野,挖掘軸承振動信號的全局特征與改進的殘差塊挖掘的局部特征以拼接的方式進行特征融合的方法可以有效減小不同工況間數(shù)據(jù)集的分布差異,從而提升準確率。由實驗結(jié)果可知,準確率較CNN模型提升約5%,較文獻[26]提出的FD-CCN模型提升0.5%到2.5%,較傳統(tǒng)TCN提升0.5%到5%。
(2)提出的TCPN模型由于加入池化層,使得網(wǎng)絡結(jié)構(gòu)更簡單,模型參數(shù)量更小,從而收斂速度更快,迭代40次即可收斂,遠低于文獻[26]提出的FDCCN模型的10 000代。
(3)軸承振動信號中存在大量冗余特征,對樣本進行降采樣可以在一定程度上減少冗余特征。當采樣頻率小于4 時準確率有小幅度提升,當采樣頻率為3時準確率接近100%,且訓練耗時降低47%,比傳統(tǒng)一維卷積神經(jīng)網(wǎng)絡低30%。
5.2 實驗不足
(1)在變工況AB-C 實驗中,本文提出的方法準確率雖然提高了9.55%,但是仍低于99%,對比于AC-B以及BC-A數(shù)據(jù)集,準確率有待提高;
(2)在樣本降采樣實驗中,分類混淆矩陣如圖8所示。由圖可知,當采樣頻率大于4 時,只有類別2與類別6、類別4與類別8難以區(qū)分,其余類別仍然可分,但TCPN未解決該問題。
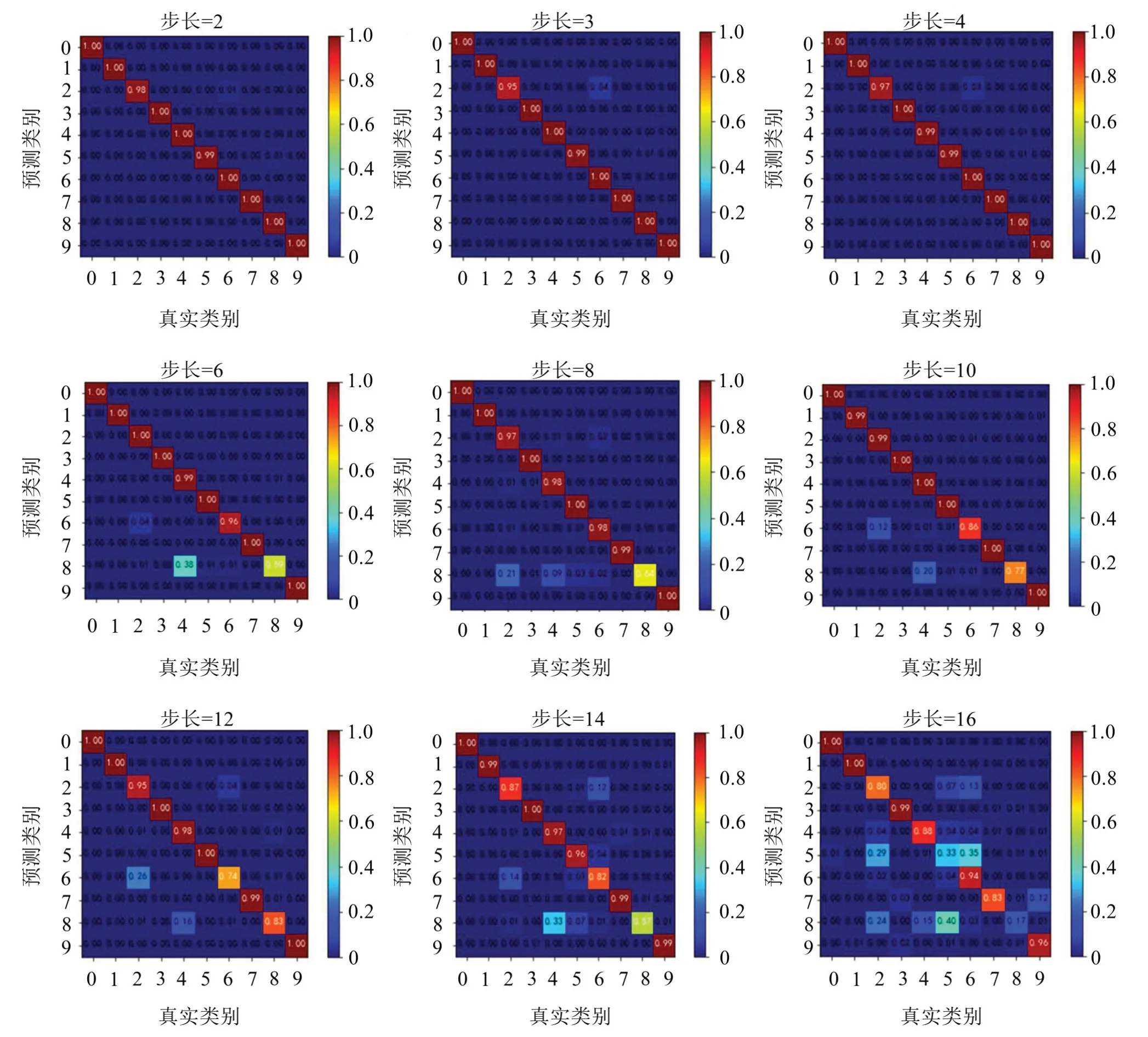
圖8 不同采樣頻率下的混淆矩陣
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年11期)2018-08-04 03:25:42
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
