運行工況下電動汽車內(nèi)置式永磁同步電機振動噪聲源識別
2022-10-21 08:15:54李全峰劉世昌
噪聲與振動控制 2022年5期
關(guān)鍵詞:振動
李全峰,劉世昌
(上海電機學(xué)院電氣學(xué)院,上海 201306)
近年來,由于電動汽車在性能、重量、體積、成本等方面的嚴(yán)苛要求,使車用牽引永磁同步電機的設(shè)計極力追求高轉(zhuǎn)速、寬調(diào)速、高密度和輕量化的最優(yōu)方案,以致電機能量轉(zhuǎn)換空間高度集中,材料利用不斷逼近極限,從而使振動噪聲、散熱、可靠性、穩(wěn)定性等問題日益凸顯[1]。
由于電動汽車對乘坐的舒適性要求更高,因此需要準(zhǔn)確計算電機在全轉(zhuǎn)速和全功率范圍內(nèi)的振動噪聲量級與分布特征[2],準(zhǔn)確定位驅(qū)動電機的噪聲源并進(jìn)行振動噪聲診斷試驗是提高驅(qū)動電機及整車NVH設(shè)計水平的關(guān)鍵[3]。目前對于車內(nèi)噪聲的分析通常使用傳遞路徑分析法[4-5],這種方法可以對車內(nèi)振動噪聲源與傳遞路徑進(jìn)行分解、評估和排序,分析之后再有針對性地進(jìn)行噪聲控制,從而達(dá)到優(yōu)化整車振動噪聲性能的效果。除了汽車行業(yè),傳遞路徑分析在船舶等領(lǐng)域的噪聲源識別也十分有效[6]。
對于電機振動噪聲源識別技術(shù)而言,氣隙內(nèi)復(fù)雜的電磁場是噪聲源識別的一大難點,文獻(xiàn)[7]和文獻(xiàn)[8]對永磁同步電機的徑向電磁力波進(jìn)行了詳細(xì)的推導(dǎo),其中文獻(xiàn)[7]著重推導(dǎo)了逆變器供電導(dǎo)致電機新增的電磁力波表達(dá)式,并總結(jié)了逆變器供電下電機中主要激振力的頻率特征表達(dá)式。
文獻(xiàn)[9]討論了逆變器供電對內(nèi)置式永磁同步電機振動噪聲的影響,文中指出0階和8階(2p)徑向電磁力是振動噪聲的主要來源,該結(jié)論可推廣到其他的整數(shù)槽永磁同步電機。
文獻(xiàn)[10]推導(dǎo)出電機氣隙中0 階徑向電磁力的頻率等于齒槽轉(zhuǎn)矩的頻率。文獻(xiàn)[11]和文獻(xiàn)[12]討論了時間諧波對電機振動的影響,其中文獻(xiàn)[12]對電機和齒輪箱集成的整體機械系統(tǒng)進(jìn)行了振動噪聲仿真和實驗,結(jié)果表明除了徑向電磁力以外,電機與齒輪箱之間的嚙合力也是重要的振動噪聲源。
隨著電動汽車向著更高的集成化發(fā)展,電機系統(tǒng)的振動噪聲源也越來越復(fù)雜,這導(dǎo)致電機的噪聲源識別越來越困難。對于電機的噪聲而言,除了噪聲源繁多,傳遞途徑也非常復(fù)雜,不但有結(jié)構(gòu)傳聲還有空氣傳聲。因此,準(zhǔn)確識別電機的噪聲源具有重要的研究價值。
本文首先推導(dǎo)電動汽車內(nèi)置式永磁驅(qū)動電機在空載和負(fù)載下的徑向電磁力波解析表達(dá)式,得到電磁力波的階數(shù)、幅值和頻率。然后根據(jù)電磁力波頻率,通過振動和噪聲試驗尋找到電機的振動噪聲源,研究線條為之后的電機優(yōu)化設(shè)計提供了參考依據(jù)。
1 永磁電機空載徑向電磁力波分析
對于電機而言,振動噪聲的主要來源是電機氣隙中的徑向電磁力波,要對電機的振動噪聲源進(jìn)行識別首先就需要對電機空載和帶載下的徑向電磁力波進(jìn)行分析[7-8]。由麥克斯韋張量法可知,永磁同步電機在單位面積上的徑向電磁力波Wr(θ,t)可寫為式(1):

式(1)中:Br(θ,t)為永磁同步電機氣隙磁密的徑向分量,μ0是真空磁導(dǎo)率,θ是電機氣隙中的空間角度,電機空載時認(rèn)為定子繞組中沒有通入電流,根據(jù)文獻(xiàn)[7]和文獻(xiàn)[8]可以推導(dǎo)出,電機空載時氣隙磁密為:
式(2)中:Br1(θ,t)是永磁同步電機空載運行時氣隙磁密的徑向分量,F(xiàn)μ是轉(zhuǎn)子永磁體產(chǎn)生的μ階徑向氣隙磁動勢幅值,Λ0和Λl分別是氣隙磁導(dǎo)不變部分和l階周期分量幅值,p是電機的極對數(shù),Z是電機的定子槽數(shù)。將式(2)代入式(1),電機空載運行時徑向電磁力波可表示為式(3):
式(3)中:Wr1(θ,t)是電機空載運行時氣隙中的徑向電磁力波,Bμ=μ0Fμ/δ,Bμ是轉(zhuǎn)子永磁體μ階徑向氣隙磁動勢的幅值,δ是定轉(zhuǎn)子中間氣隙的長度,以μ0/δ作為基準(zhǔn)值,Λ0*和Λl*是氣隙磁導(dǎo)的標(biāo)幺值,可將電機空載運行時徑向電磁力波分為三部分:
第一部分是轉(zhuǎn)子永磁體磁動勢與氣隙磁導(dǎo)不變部分相互作用產(chǎn)生的徑向電磁力波,如式(4)所示:

第二部分是轉(zhuǎn)子永磁體磁動勢分別和氣隙磁導(dǎo)不變部分、氣隙磁導(dǎo)周期分量相互作用產(chǎn)生的徑向電磁力波,如式(5)所示:
第三部分則是由轉(zhuǎn)子永磁體磁動勢和氣隙磁導(dǎo)周期分量相互作用產(chǎn)生的徑向電磁力波,如式(6)所示:
電機空載運行時氣隙中的徑向電磁力波特性可以歸納為表1。
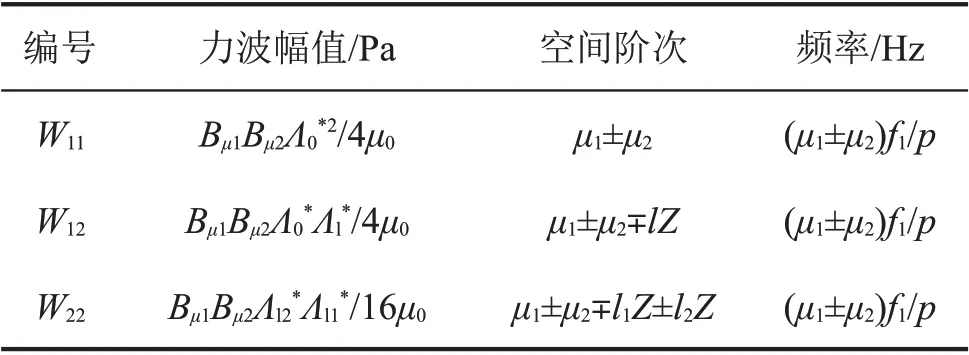
表1 電機空載運行時的徑向電磁力波特性
2 永磁電機負(fù)載徑向電磁力波分析
永磁同步電機帶載運行時,電機定子繞組通入電流,電流在氣隙中產(chǎn)生相應(yīng)的磁動勢,磁動勢與磁導(dǎo)相互作用產(chǎn)生氣隙磁密。同理,可以推導(dǎo)出負(fù)載下電機的徑向氣隙磁密Br(θ,t),電機帶載運行時氣隙磁密可表示為式(7):
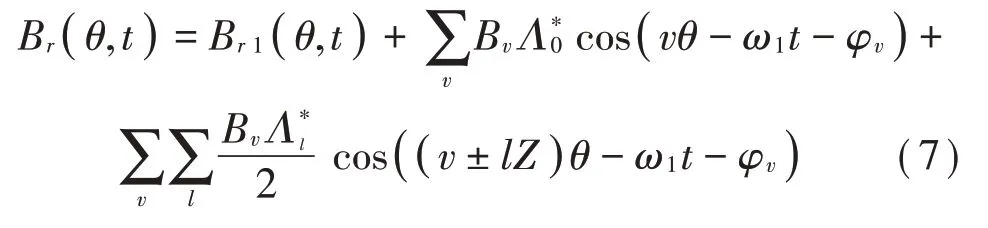
式(7)中:Br1(θ,t)是永磁同步電機空載運行時的徑向氣隙磁密,Bv是定子繞組磁場的v階徑向氣隙磁密幅值,φv是定子繞組磁場的v階徑向氣隙磁密的初始相位,ω1是定子繞組電流基波的角頻率,這里僅考慮基波分量,如時間諧波電流幅值較低則可以暫時忽略。將式(7)代入式(1),則可以將電機帶載運行下的徑向電磁力波表達(dá)為式(8)。
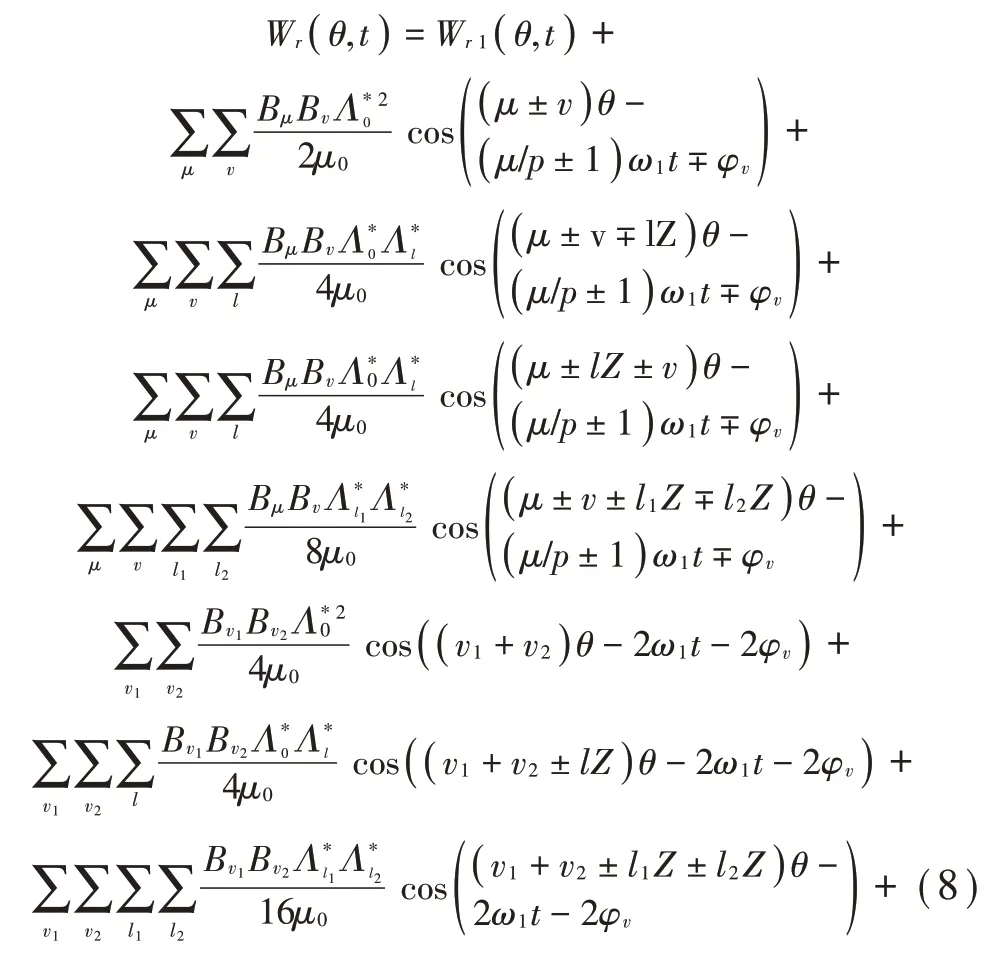
由式(8)可知,當(dāng)電機負(fù)載運行時,氣隙磁場新增了7 項與定子繞組電流相關(guān)的徑向分量,可以分別表示為:
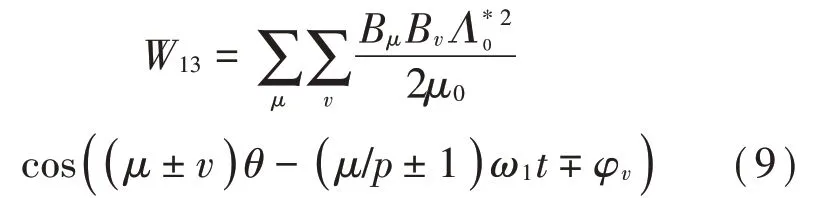
第一部分是定子繞組磁動勢、轉(zhuǎn)子永磁體磁動勢分別和氣隙磁導(dǎo)不變部分作用產(chǎn)生的徑向電磁力波,如式(9)所示:
第二部分是定子繞組磁動勢和氣隙磁導(dǎo)周期分量作用、轉(zhuǎn)子永磁體磁動勢和氣隙磁導(dǎo)不變部分作用產(chǎn)生的徑向電磁力波,如式(10)所示:

第三部分是定子繞組磁動勢和氣隙磁導(dǎo)不變部分作用、轉(zhuǎn)子永磁體磁動勢與氣隙磁導(dǎo)周期分量作用產(chǎn)生的徑向電磁力波,如式(11)所示:

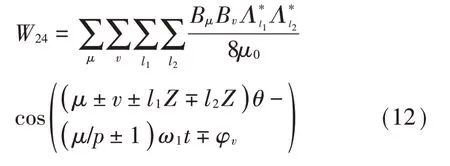
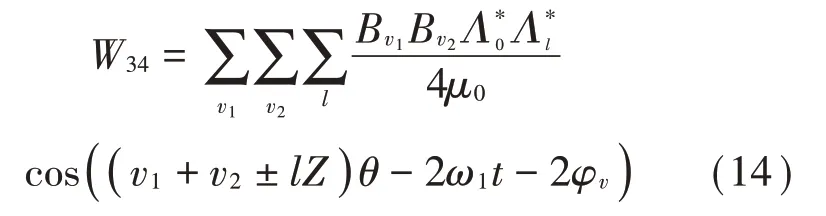
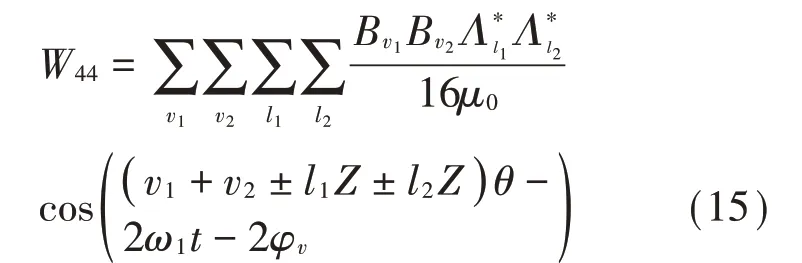
第四部分是定子繞組磁動勢、轉(zhuǎn)子永磁體磁動勢分別和氣隙磁導(dǎo)周期分量作用產(chǎn)生的徑向電磁力波,如式(12)所示:
第五部分是定子繞組磁動勢和氣隙磁導(dǎo)不變部分作用產(chǎn)生的徑向電磁力波,如式(13)所示:

第六部分是定子繞組磁動勢分別和氣隙磁導(dǎo)不變部分、氣隙磁導(dǎo)周期分量作用產(chǎn)生的徑向電磁力波,如式(14)所示:
第七部分是定子繞組磁動勢和氣隙磁導(dǎo)周期分量作用產(chǎn)生的徑向電磁力波,如式(15)所示:
電機帶載運行時氣隙中的徑向電磁力波特性可以歸納為表2。
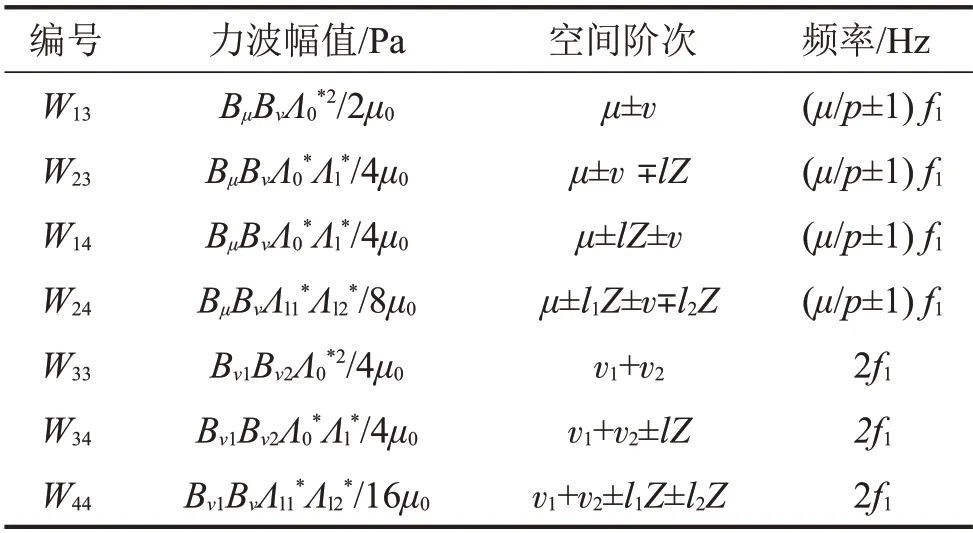
表2 電機帶載運行時新增的徑向電磁力波特性
3 永磁同步電機振動源識別掃頻試驗
振動噪聲源識別試驗以一臺48槽8極電動汽車永磁同步電機作為試驗樣機,測試設(shè)備采用丹麥Brüel&Kj?r公司生產(chǎn)的噪聲振動測試系統(tǒng),該測試系統(tǒng)由4 部分組成:第一部分是振動加速度傳感器和前置放大器,采用B&K 4534-B 型小型智能傳感器,頻率范圍為0.2 kHz~1.28 kHz;第二部分是轉(zhuǎn)速激光探頭;第三部分是數(shù)據(jù)采集前端,采用B&K 3050-A 型六通道信號輸入模塊,分析頻率范圍為0 Hz~51.2 kHz;第四部分為計算機,利用B&K 8403-NS 型振動、噪聲分析軟件對試驗數(shù)據(jù)進(jìn)行頻域分析。整體系統(tǒng)連接如圖1所示,圖2為樣機振動掃頻階次試驗現(xiàn)場。
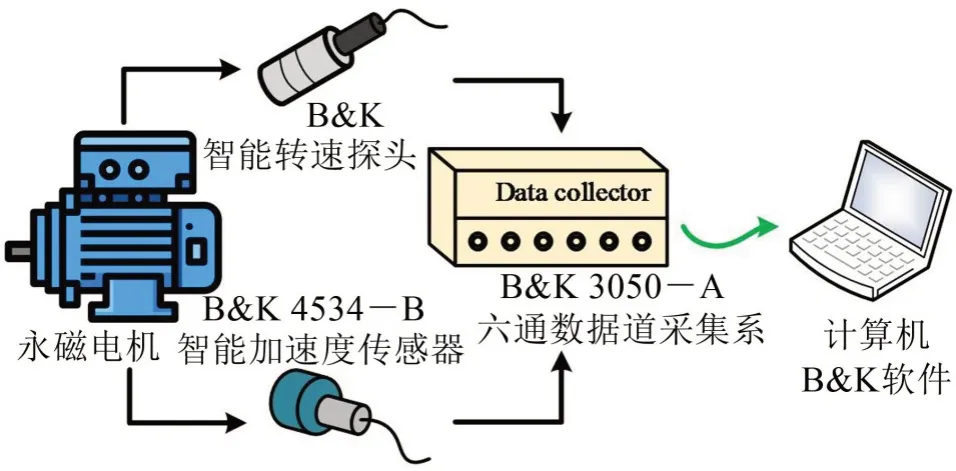
圖1 樣機振動掃頻階次試驗研究系統(tǒng)連接圖
圖2 樣機振動掃頻階次試驗現(xiàn)場
將樣機分別運行在升速工況0~8 200 r/min 空載下和0~8 200 r/min、25 Nm 負(fù)載下,將加速度傳感器的輸出信號經(jīng)過動態(tài)信號采集儀處理后得到樣機整個運行范圍內(nèi)的振動加速度信號頻譜圖,顏色明暗代表加速度強弱,單位m/s2。樣機的參數(shù)如表3所示。
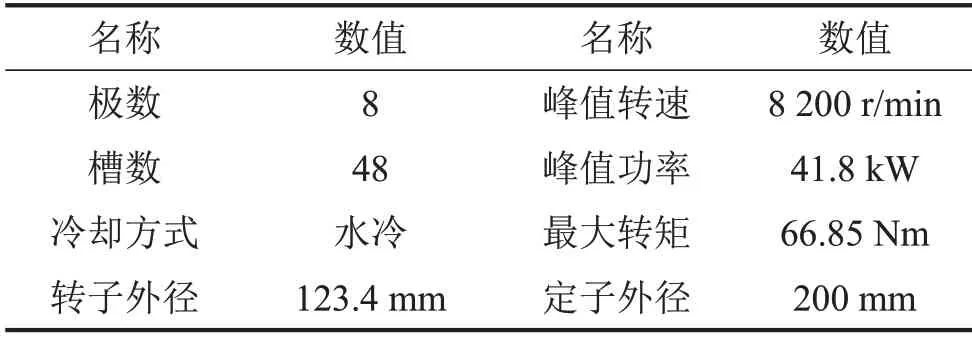
表3 實驗樣機參數(shù)
圖3、圖4分別為樣機在0~3 kHz頻率范圍內(nèi)空載和負(fù)載運行不同頻率分辨率下的加速度colormap圖。
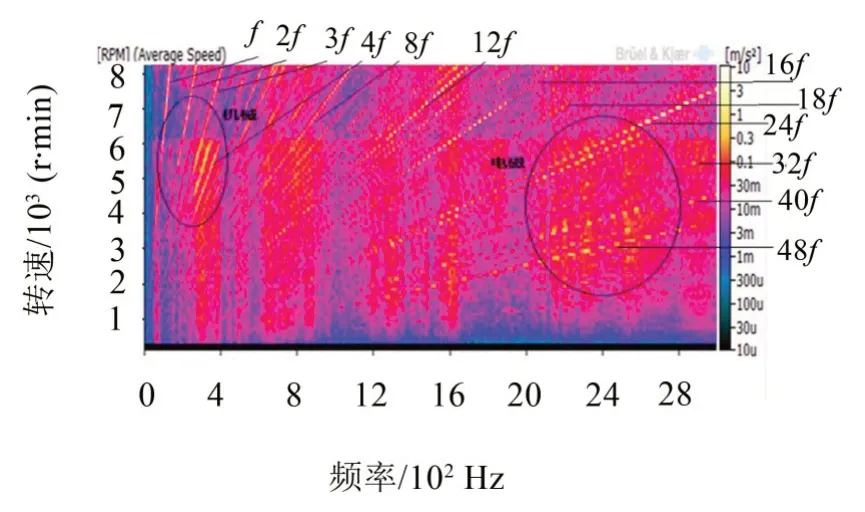
圖3 樣機空載運行振動加速度掃頻階次colormap圖
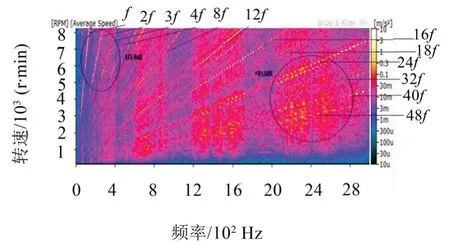
圖4 樣機負(fù)載運行振動加速度掃頻階次colormap圖
由于機械1 階轉(zhuǎn)頻f=n/60,而電磁一倍頻fn=pn/60,其中n為電機轉(zhuǎn)速,則分析加速度掃頻頻譜圖可得到如下結(jié)論:
(1)從圖3中可以看出,在低頻段振動加速度主要來自于低頻機械振動(f、2f、3f…),轉(zhuǎn)速越高則產(chǎn)生的機械振動越大,且空載時的機械振動要大于負(fù)載。
(2)從圖4可以看出,負(fù)載下低頻段振動加速度主要來自于低頻機械振動(f、2f、3f…),轉(zhuǎn)速越高則產(chǎn)生的機械振動越大,且空載時的機械振動要大于負(fù)載。中頻段1 kHz~3 kHz 頻率范圍內(nèi),低階電磁頻率(fn、2fn、3fn、4fn…10fn、12fn…)的作用明顯。
4 樣機噪聲源定位聲全息試驗
聲源識別可以有效地提取聲學(xué)特征。目前聲源識別方法主要分為三大類:
(1)傳統(tǒng)識別法,如主觀評價法、分部運轉(zhuǎn)法、分別覆蓋法、近場測量法、表面速度測量法、表面強度法、聲強測量法;
(2)基于信號處理的識別法,如頻譜分析法、倒譜分析法、常相干函數(shù)法、偏相干函數(shù)法;
(3)聲全息法,如近場聲全息、等效源法、局部近場聲全息等[4-5]。
聲全息方法是通過測量一個二維面上的聲壓,并利用重構(gòu)算法來重構(gòu)聲源表面的三維聲場,最后用圖形的形式將聲場展現(xiàn)出來。聲全息方法不但使用了聲信號的強度信息,而且還利用了其相位信息,結(jié)果十分直觀,可以很容易地對聲源進(jìn)行定位、量化、特征提取,并能顯示噪聲的傳播路徑[6]。如果在電機運行時能夠清楚知道電機機殼上哪個位置輻射的噪聲最大,即定位噪聲源,則可以對電機噪聲的抑制提供很大幫助。本節(jié)將利用聲全息法通過測試永磁同步電機運行時的噪聲分布進(jìn)而定位噪聲源。
試驗采用的是Brüel&Kj?r公司生產(chǎn)的PULSE Reflex聲學(xué)照相機套裝,包括9712-W-FEN型聲學(xué)照相機硬件組件和8781 型PULSE Reflex 陣列分析軟件。如圖5所示。

圖5 基于聲陣列的樣機聲源定位試驗
其中9712-W-FEN 型聲學(xué)照相機為硬件組件,包括WA-1764-W-001型手持陣列和LAN-XⅠ數(shù)據(jù)采集硬件,其中LAN-XⅠ數(shù)據(jù)采集硬件包括外框,模塊和前面板。手持聲陣列WA-1764-W-001 型陣列是30通道切片輪式陣列,具有集束電纜和可拆卸反射板,配有集成手柄,手柄內(nèi)置平板電腦支架,陣列中心設(shè)有攝影機,每秒可拍攝量為15幀到20幀。該陣列使用的傳聲器是4959 型傳聲器。該傳聲器是一款1/4 預(yù)極化傳聲器,配有TEDS,其頻率范圍為50 Hz~20 kHz。測試結(jié)果如圖6至圖11所示。
試驗樣機運行在空載2 500 r/min 下,分別從樣機正面、側(cè)面和頂部離軸心1.5米處測取聲全息圖像如圖6 至圖11 所示,最大噪聲點位置及幅值如表4所示。
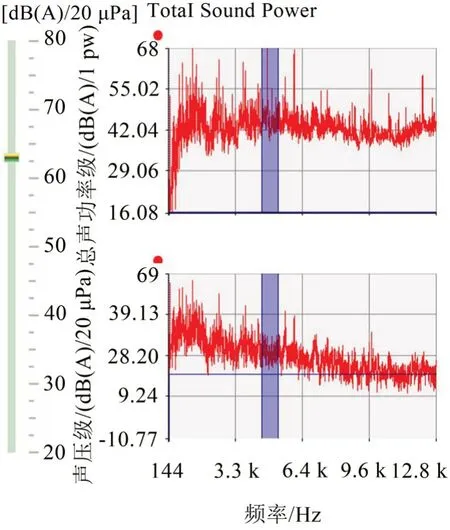
圖11 樣機空載2 500 r/min聲全息試驗頂部噪聲頻譜
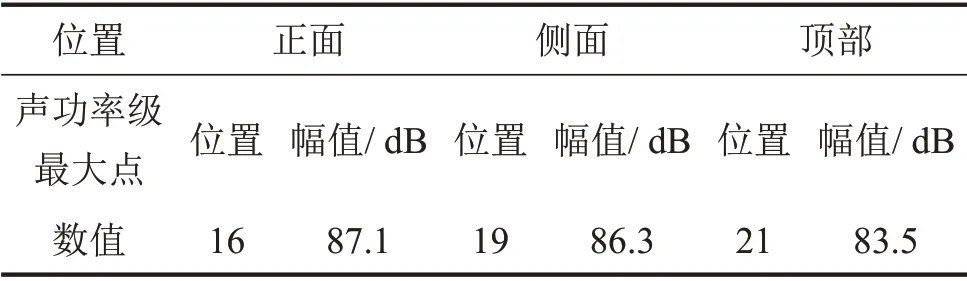
表4 聲全息試驗最大噪聲點位置及幅值
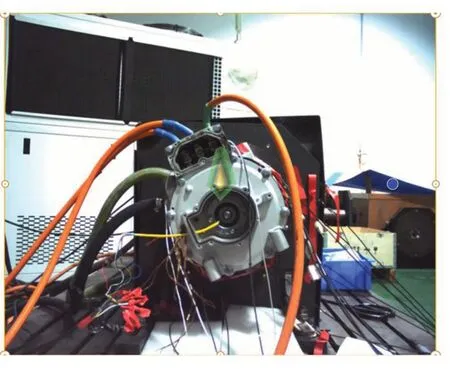
圖6 樣機空載2 500 r/min聲全息試驗-正面
從結(jié)果中可以看出正面端蓋頂部相對噪聲值較大;從側(cè)面聲全息分析結(jié)果可以看出靠近端蓋的左側(cè)機殼處相對噪聲較大;頂部噪聲較大的部位在頂端接線盒位置。
通過聲全息試驗可以很直觀地觀測出噪聲輻射較大點的具體位置,可詳細(xì)地獲取電機運行時噪聲源的分布情況,為采取針對性措施減小電機的振動噪聲提供指導(dǎo)。
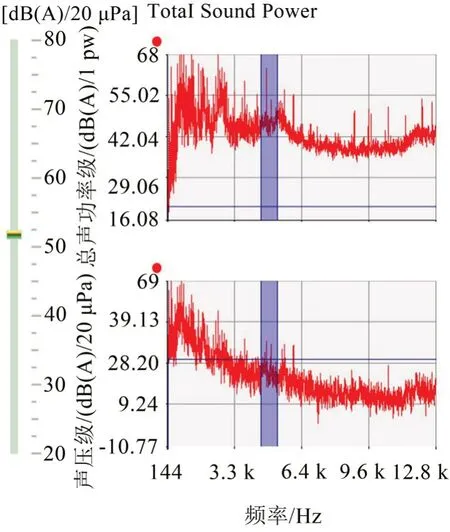
圖7 樣機空載2 500 r/min聲全息試驗正面測試噪聲頻譜
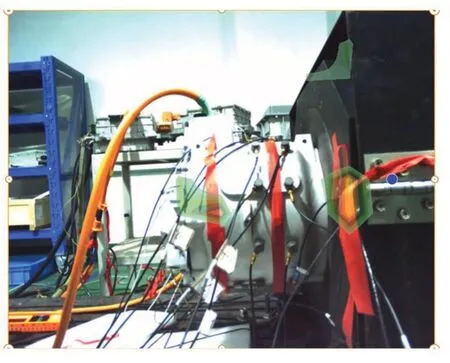
圖8 樣機空載2 500 r/min聲全息試驗-側(cè)面
5 結(jié)語
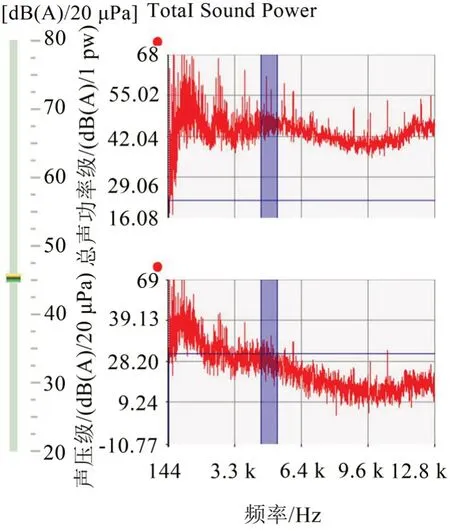
圖9 樣機空載2 500 r/min聲全息試驗側(cè)面噪聲頻譜
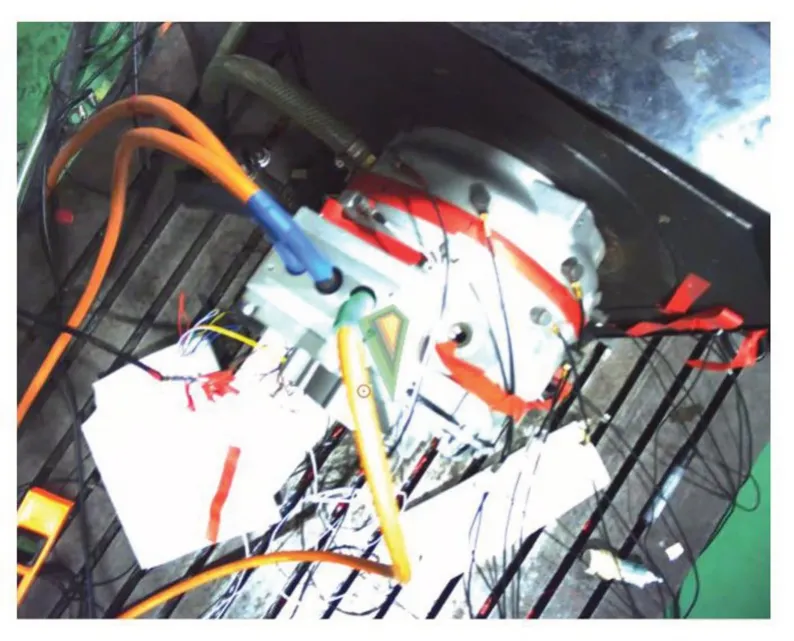
圖10 樣機空載2 500 r/min聲全息試驗-頂部
本文分別推導(dǎo)出車用內(nèi)置式永磁同步電動機在空載和帶載運行時產(chǎn)生的空間電磁力波解析表達(dá)式,得到電磁力波的階次、幅值和頻率;利用振動階次掃頻試驗和聲全息試驗的方法識別電機的振動噪聲源。通過振動掃頻階次試驗發(fā)現(xiàn)低頻振動以機械振動為主,中高頻振動以電磁振動為主。在低頻段(800 Hz以內(nèi))振動加速度主要來自于低頻機械振動(f、2f、3f…),轉(zhuǎn)速越高則產(chǎn)生的機械振動越大,空載時可以看出電機噪聲較大的部位,分別出現(xiàn)在樣機正面端蓋頂部、側(cè)面靠近端蓋的左側(cè)機殼處以及頂部頂端接線盒位置,且電機正面輻射的噪聲較大。至此,利用理論和試驗相結(jié)合的方法尋找到電機不同運行工況下的主要噪聲源。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(理學(xué)版)(2014年3期)2014-03-01 04:21:00
